1. Introduction
Vehicular ad hoc networks (VANETs) is an application of mobile ad hoc networks (MANETs) for the field of the internet of vehicles (IoV) [
1,
2]. Compared with other mobile ad hoc networks, VANET is a network that can communicate wirelessly among the vehicles, and between the roadside units (RSUs) to vehicles [
3]. Intelligent Transportation System (ITS) applications are being supported by VANETs. It is designed for the comfort and safety of the passengers and also to improve the transportation efficiency [
4]. For the new application scenarios, inter-vehicle communication (IVC) has aroused widespread research interest in academia as well as industry [
5]. The vehicles are treated as autonomous mobile nodes, connected in an environment wirelessly, though these nodes are not present in similar range, passing through multiple intermediate nodes [
6]. The VANETs build and maintain ad hoc networks with the aid of routing protocols [
7]. The routing protocol proposed in VANETs may be table-driven (proactive), on-demand-driven (reactive), or hybrid [
8,
9]. The on-demand (reactive) routing protocols discussed here are ad hoc on-demand distance vector (AODV) and our proposed unmanned aerial vehicle (UAV)-assisted AODV (UAVa). For mobile ad hoc networks a routing is important [
10]. A lot of work has been conducted into routing protocols [
11]. Many protocols are aimed at delivering higher quality of service (QoS) and saving more resources [
12]. AODV is the most popular routing protocol which contains the technique of route discovery and route maintenance [
13]. The source node transmits the packet of the routing requests to the network destination node. After the routing request packet has been received, the intermediate node must forward the packet before the routing request is received by the destination node, and the repeat request packet is discarded [
14]. The AODV routing protocol also attaches the sequence number to the request packet to control the routing loops at the same time. Without any transmission requirements, the proactive routing protocol can create routes between nodes in advance. This is different from the reactive routing protocol, i.e., a node only updates its neighbors so far with its known routing information, assuming that all nodes will use the whole network updated to the information [
15]. Private vehicles have become an integral part of our everyday lives because of the rapid growth of our society, the rise in individual vehicles; traffic congestion has become an acute issue that needs to be addressed [
16]. In our proposed scheme, congestion control is our first target. Nowadays, congestion regulation has become a widely debated concern in vehicle-to-vehicle (V2V) communications, i.e., ensuring secure and effective communications through the use of limited resources available in vehicular ad hoc networks (VANETs) [
17]. A node in VANET represents the vehicle.
The shortcomings of existing congestion control mechanisms over VANETs have inspired us to propose an approach with an improvement in the existing algorithms to meet the demands of current technology in handling vehicles in addition to assuring safety in communicating vehicles with reliability. The issues faced before introducing the solutions to the congestion in VANETs were limited bandwidth, high mobility, retention of connection amongst the moving nodes, avoidance of interference and noise, maintaining signal strength in the presence of the dense building on the sides of the roads, etc. [
18].
In this article, an innovative mechanism is proposed in which current-time traffic information accumulation and sharing to the entire traffic network and how to regulate congestions before it happens are studied. This not only ensures the sharing efficiency but also demonstrates the low complexity of accumulating the current-time traffic information and sharing it. Within the existing conditions of traffic, the traffic rules were completely used to remove any congestion. We performed a simulation-based performance assessment of our UAVa protocols and demonstrated the efficacy and robustness of UAVa in terms of adding routing efficiency, average throughput, instant throughput, reduced latency, and improved delivery ratio and residual energy compared to AODV protocols. The processes and algorithms will be further discussed in the following sections.
The rest of this paper is structured as follows: In
Section 2, we present examples and discussions of intersection-based congestion control routing protocols. In addition to the details of the proposed UAVa routing protocol and algorithms, key estimates and features are provided in
Section 3, the simulation and evaluation processes are described in
Section 4; and the conclusions are finally drawn in
Section 5.
2. Related Works
For controlling congestion, current-time information sharing is very important. This becomes a significant challenge for sharing current-time information in VANETs due to the imbalance of traffic flow on the road network and sudden obstructions, blockages, or traffic accidents. To achieve a mechanism for the current-time sharing of information in a fast-moving node transportation network, a road-based vehicular traffic (RBVT) routing through VANETs presented in [
19]. In [
6], the authors present a method for estimating travel time from a source place in a road network to a destination place called Travel Time Assessment (TTE), which serves as a route planning metric. They proposed a current-time route planning algorithm based on TTE comparisons by collecting data to avoid traffic congestion in an intersection. In [
20], to improve the connectivity of intersection-based routing, the authors have introduced the connectivity of junction-based routing (CJBR). Like other routing protocols focused on intersections, CJBR disregards dependence on traffic density metrics for the selection process of intersections during the development of routing paths in urban environments.
The author has designed a flooding model in [
21] that automatically responds to any change in topology while overcoming current obstacles. At the same time, in an ad hoc fashion, exchange data with a drone, commonly known as an unmanned aerial vehicle (UAV) in this work, explores well-regulated routing paths that can provide long-life connectivity. UAV’s assistance to vehicles will provide a high transfer rate and low transfer latency, while effectively extending the network link, depending on the amount of traffic and the end time of each discovered path. In Silva et al. [
22] other functions are introduced to enhance the efficiency of its proposed algorithm, including (1) Using the data in the extended neighboring table for optimal route selection, and seek to prevent neighbors from reaching local maximums on each destination route and avoiding the loop of data packets. (2) Substitute the constant greedy forwarding with the right-hand rule in recovery mode, and the left-hand rule fused at the same time. Guo et al. [
23] proposed an optimization model, which reduces the amount of total travel time on the road network and the time representation of the system’s impact of traffic imbalances. The author introduces the analytical expression of the problem of optimization and proposes an algorithm, the dynamic interior point method (DIPM), which by rerouting the driver solves this problem of optimization.
In [
24], the author proposes an optimization model that not only increases traffic flow but also avoids traffic congestion to improve road utilization. The algorithm uses a real map for simulating the area, with a large amount of traffic data. In [
25], the author provides an analytical framework to study UAV-to-UAV communication underlay with the uplink of a cellular network. In their work, they proposed a realistic channel model, antenna pattern, and power control strategy equation obtained. In [
26], the author proposed a protocol named early congestion detection and control routing protocol (EDAODV). This protocol is applicable to one-way highways and contrasted to AODV protocol because it is non-adaptive to routing congestion in VANETs.
However, previous congestion control methods can not resolve the effects of the present traffic conditions, such as the traffic flow on-road segments and the waiting queue at the intersections. Based on the UAV-assisted traffic congestion control method, there are several technologies and algorithms based on intersection congestion control methods in VANETs. In [
27], the author proposed the UAV-assisted VANETs routing protocol (UVAR) and its extensions to support self-organized routing between VANETs and UAVs as well as UAVs themselves. The UVAR protocol is designed for urban scenarios, and its primary goal is to enhance the routing efficiency based on UAV’s knowledge of ground road traffic. Moreover, the combination of RSUs and UAVs at the intersection for controlling congestion is remaining.
3. UAV Assisted (UAVa) Reactive Protocol Strategy
After describing some of the proposed work in the literature and mentioning their shortcomings, this section will describe UAVa and its key processes.
Route Discovery Process: The route discovery scheme is used to discover the suitable routes between communication networks, the selected route may include all types of equipment used as relays (e.g., Vehicles, RSUs, or UAVs).
Route Selection Process: The source node analyzes various metrics and selects the shortest route from the source to the destination using Dijkstra’s famous greedy algorithm.
Packet Delivery Process: Data packets are converted along their respective routing paths.
Replan and Revise Process: Due to the dynamic topology of the network, a permanent connection to the selected routing route cannot be achieved. Therefore, always looking for alternative routes is an essential condition.
Before unfolding the effectiveness of our proposed scheme, a preliminary description of the communication method between nodes and our proposed UAVa system model is required. Later, the key process of our proposed UAVa protocol will be described in detail.
3.1. UAVa’s System Model
UAVa is proposed to reduce the dependence on the traffic density for reducing the congestion and intermediate intersections selection between the source node and the destination node, and increase data packet transmission rate, thereby enhancing intersection-based routing mobility by sending data at any time and anywhere irrespective of traffic density. The novelty of this selection mechanism is that the roadside units (RSUs) and unmanned aerial vehicles (UAVs) at road intersections are among the selection metrics, where RSUs are very important in VANETs. Yet, RSUs were not previously used as metric-assisted UAVs for intersection.
Installing RSUs every 200 m is a lot of capital cost. Reducing the capital cost of deploying RSU is justified by adding a limited number of RSUs to create the intersections. As an independent network, it is assumed that RSUs communicate with each other through the existing cellular network, i.e., there is no direct wireless or wired contact from RSU to RSU. UAVa assumes a vast and continuous traffic density at a certain period of time cycle, and that each node can download a digital map through the vehicle to roadside (V2R) communications.
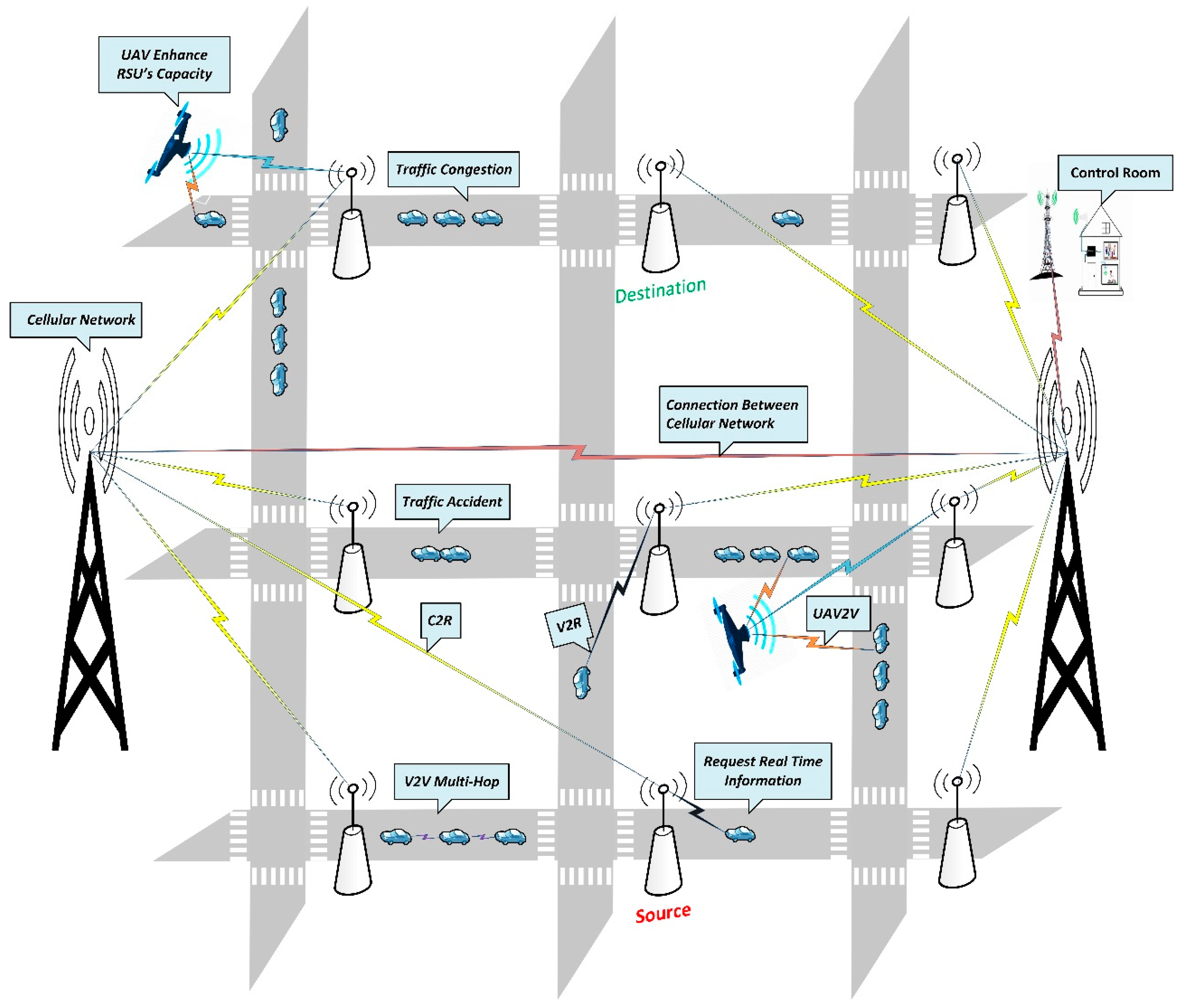
Let us illustrate the different assumptions considered by the system model of UAVa. Consider VANETs stationed in a geographically small urban area where a group of RSUs is implemented on the ground, and UAVs are hovering in the congested intersection. Both RSUs and UAVs communicate with vehicles on the ground and exchange data. As shown in
Figure 1, the road intersection is RSU based. UAVs will be assisted up to its demands. Assume that it is divided into fixed intersections with an ID. The communication range of these intersections is defined based on the RSUs capacity. For understanding our proposed network, different static connections are characterized by a unique ID, since our routing process is not primarily based on static nodes, but rather depends on the intersection. This research is essential for understanding relevant information, such as the present traffic conditions, the uniform allocation of the RSUs, and the destination location. The geographical positions and the identity of every intersection should be known by all nodes and UAVs utilizing their downloaded digital city map through V2R communications. Based on the embedded on-board unit (OBU) with GPS, every node can determine its current geographical location. In addition, we assume that there is a limitation of vitality for all nodes since they can be equipped with rechargeable batteries at first. In our proposed scheme, each node energy is 300 joules.
It should be emphasized that UAVs float very well at low altitudes to operate on the ground vehicles. We assume that RSUs are allocated uniformly across the network and moving vehicles which do not exceed 300 m during the flight of UAVs. Through following cellular standards, RSUs can communicate with each other on a wireless interface. As depicted in
Figure 1, we use six forms of wireless configuration to build the entire network communications we propose:
- (1)
Vehicle-to-Vehicle (V2V): Vehicles on the ground can communicate according to the IEEE 802.11p wireless standard within the line-of-sight (LoS) communication range with each other. In the event of an obstacle, communication is not possible.
- (2)
Vehicle-to-Unmanned aerial vehicle (V2U): Vehicles and UAVs can communicate with each other according to the IEEE 802.11p wireless standard. In general, UAVs in urban areas do not fly at high altitudes, because majority of their applications in our chosen simulation scenario must be carried out at low altitudes.
- (3)
Vehicle-to-Roadside unit (V2R): For most instances, this form of contact exists for applications requiring direct access to the information provided by the gateways (i.e., RSUs). Vehicle and RSU at a road intersection can communicate with each other based on the inclusion of a wireless protocol that adopts the IEEE 802.11p standard, which can have a high likelihood of line-of-sight (LoS).
- (4)
Cellular network-to-Road side unit (C2R): We consider the uplink of a traditional ground cellular network, as depicted in
Figure 1, where cellular networks are uniformly distributed, and all the cellular networks are deployed at the same height and communicate with their respective sets of connected RSUs. Assuming that the number of RSUs is sufficiently large compared to that of the cellular network, we further consider that RSUs associate to their closest cellular tower, which generally also provides the most significant reference signal received power. Where the 2-D distance between the interfering RSU and the typical cellular network is in a fixed range. Through existing cellular technology, the roadside unit can exchange data between them.
- (5)
Unmanned aerial vehicle-to-Road side unit (U2R): UAV-based applications need their proper functionality through internet access. We proposed the IEEE 802.11p standard for UAV to RSU communication. UAV connects to an RSU within range, either to deliver their current applications or to relay packets of data.
- (6)
Cellular-to-Cellular (C2C): Cellular technology will share data between them if the distances between them are longer than the ranges of each.
3.2. UAVa’s Design Approach
To introduce the current-time congestion control process, we propose the network architecture, and then define the definition and underlying assumptions of the road network. Our proposed UAVa protocol is similar to other routing protocols based on intersections. The UAVa protocol represents six routing types, i.e., routing with V2V in road segments, routing at road intersections with V2R, V2U, U2R, C2R, and routing between existing C2C cellular networks.
3.2.1. UAVa’s Network Architecture
UAV’s network architecture is shown in
Figure 2. Here we represent different kinds of scenarios, road segment nodes, and road intersection allocated RSUs. In an emergency basis, such as sudden congestions or blockage, UAVs assist in RSU at road intersections to increase the RSU’s coverage and capacity to regulate the situation. We consider that every node is equipped with an on-board unit (OBU), which aims to achieve V2V communication with other nodes on the road segments and V2R and V2U connection with RSU and UAV in the road intersections. OBU records overall information of a node, such as nodes ID, position, current-time speed, etc. It obtains details on the subsequent road intersection from the RSU through V2R communications. The source node can calculate the travel time based on the current-time speed of the road segment and record it by its OBU. If any blockage occurs on a particular road intersection, such as sudden traffic accidents or congestion, OBU will produce a warning message and send it to RSU, and RSU will relay this warning message through the entire traffic network, which contains the ID of the intersection and the approximated time to release the congestion.
In VANETs, V2V communication efficiency will be influenced by the speed of linked nodes in the road segments. Different V2V communication mechanisms are used to collect and exchange current-time traffic information according to different requirements of all the connected nodes in the road network. Suppose a large number of linked nodes are installed on the road network, then the current-time traffic information can be exchanged via V2V communication with multi-hop services. Due to the huge amount of connected nodes in the road segments, the source node can find reliable relay nodes within its wireless communication range, and one hop can send current-time traffic data to the relay node. Current traffic data can be transmitted along with the road segments until at the intersection the relay node joins the wireless communication range of the RSU. Using V2R or V2U communications, the RSU or UAV at the intersection may collect current-time traffic information while the large majority of connected nodes on the route, the effect of data transmission delay on travel time estimation accuracy, are typically ignored.
When a small part of connected nodes is deployed in a vehicular ad hoc network, current-time traffic information on the road intersections can be accumulated and shared through V2R communication. Due to the low rate of connected nodes, the current-time traffic information accumulated and shared along with the road segments, via the carry-and-forward mechanism, suppose a source node within its wireless communication range cannot find a reliable relay node to share the current-time traffic information. In this scenario, the node will continue to move along the path with current-time traffic information. If a stable relay node is located by the source node, the information will be transmitted by continuing to switch between forward and backward until the relay node reaches the contact range of the RSU at the intersection. The RSU uniformly deployed each intersection to accumulate the current-time traffic information from the mobile nodes through V2R or V2U communications in VATENTs.
In the entire network, the RSUs of the road network are connected through a cellular network, and the R2R communication is realized through our designed current-time traffic data accumulation and sharing mechanism. We considered two types of the traffic data being stored in the memory of RSU, which is the static data type and the dynamic data type. Static data contain the distance of each road segment, road intersection information, the capability of different areas, all of which are obtained through digital maps. Another is dynamic current-time information accumulated from nodes through VANETs or transportation infrastructure, such as traffic surveillance cameras and detection circuits. Connected nodes upload dynamic information via V2R communication or V2U communication, such as sudden traffic congestion caused by unexpected accidents. At the intersection, the traffic monitoring camera and detection circuits track and record real-time traffic information, which includes road density and number of nodes, and then upload the real traffic information to the RSUs at the intersections. Complex traffic details are automatically updated on the entire road network.
In our proposed UAVa’s network architecture, RSUs at intersections cover a limited communication area, inside this coverage area the RSU receives the node’s request and response, the node arrives at this coverage area and requests to RSU for current-time traffic information through VANETs. RSU shares current traffic information through our designed current-time traffic information accumulation and sharing mechanism, designed to accumulate and share current-time traffic information across the entire road network. The node calculates the travel time estimate and selects the shortest route from the source to the destination through Dijkstra’s famous greedy shortest path planning algorithm. Once sudden congestion occurs, immediately current-time traffic information is updated to the entire network. Then the control room will take immediate action, and they launch a UAV to this congested intersection. The UAV will assist RSU in this congested intersection to enhance the coverage area of this intersection, and create a backpressure strategy to avoid new congestion and fixed-route interruption among the source to the destination node. By using the routing table, the source node can modify or revise the route again, and the source node can select the second shortest route for the destination. Our proposed UAVa algorithm is briefly described in Algorithm 1.
| Algorithm 1 Accumulation of Real-Time data |
| 1: BEGIN |
| 2:/* Initialization*/ |
| 3:Vehicle←(Vid, Ncij)//Ncij – Vehicles Current Intersection |
| 4: Define Source ←Vcl, Destination ←Vdl//cl – Current Location, dl- Destination Location |
| 5: Input Find Shortest Route (Vcl Vdl) |
| 6:/* Initialize: Dijkstra’s Algorithm */ |
| 7: Create intersection set w |
| 8: for intersection v in map: |
| 9: distance[v] ← ∞ |
| 10: visited[v] ← Not Visited |
| 11: add v to w |
| 12: distance[source] ← 0 |
| 13: if w =! = 0 then |
| 14: u ← Intersection in w with minimum distance[u] |
| 15: update u from w |
| 16: for neighbor intersection v of u: |
| 17: distance[alt] ← distance[u] + length (u, v) |
| 18: if distance[alt] < distance[v] then |
| 19: distance[v] ← distance[alt] |
| 20: visited[w] ← u |
| 21:/*select the shortest route*/ |
| 22: Input Vid(request) The Real Time Traffic Information ← Nij(information) |
| 23: If Destination Intersection Ndij = 0 then//Ndij–Destination Intersection |
| 24: Follow the Selected Route |
| 25: else |
| 26: Revise and Replan Route ACK(information)//ACK-Acknowledgment |
| 27: id← ACK (information) |
| 28: Revise and Re-plan the Route (Vcl Vdl) |
| 29: Select the Second Minimum Route |
| 30:/* Avoid Traffic Congestion */ |
| 31: if/*RSU Capacity Overflow */ |
| 32: RSU(send-packet) > ACK(receive-packet) |
| 33: RSU(send-packet) = | = ACK(receive-packet) then |
| 34: RSU(send request for-UAV) CLN(receive UAV request-UAV + 1)//CLN—Cellular Network |
| 35: CLN(request-UAV + 1) CR(receive-UAVrequest)//CR—Control Room |
| 36: CR Send the UAV to the Congested Intersection. |
| 37: OUTPUT: Enhance RSU Capacity. |
| 38: END |
3.2.2. Route Discover Metrics
In this section, some of the metrics used in the UAVa routing mechanism are discussed in detail.
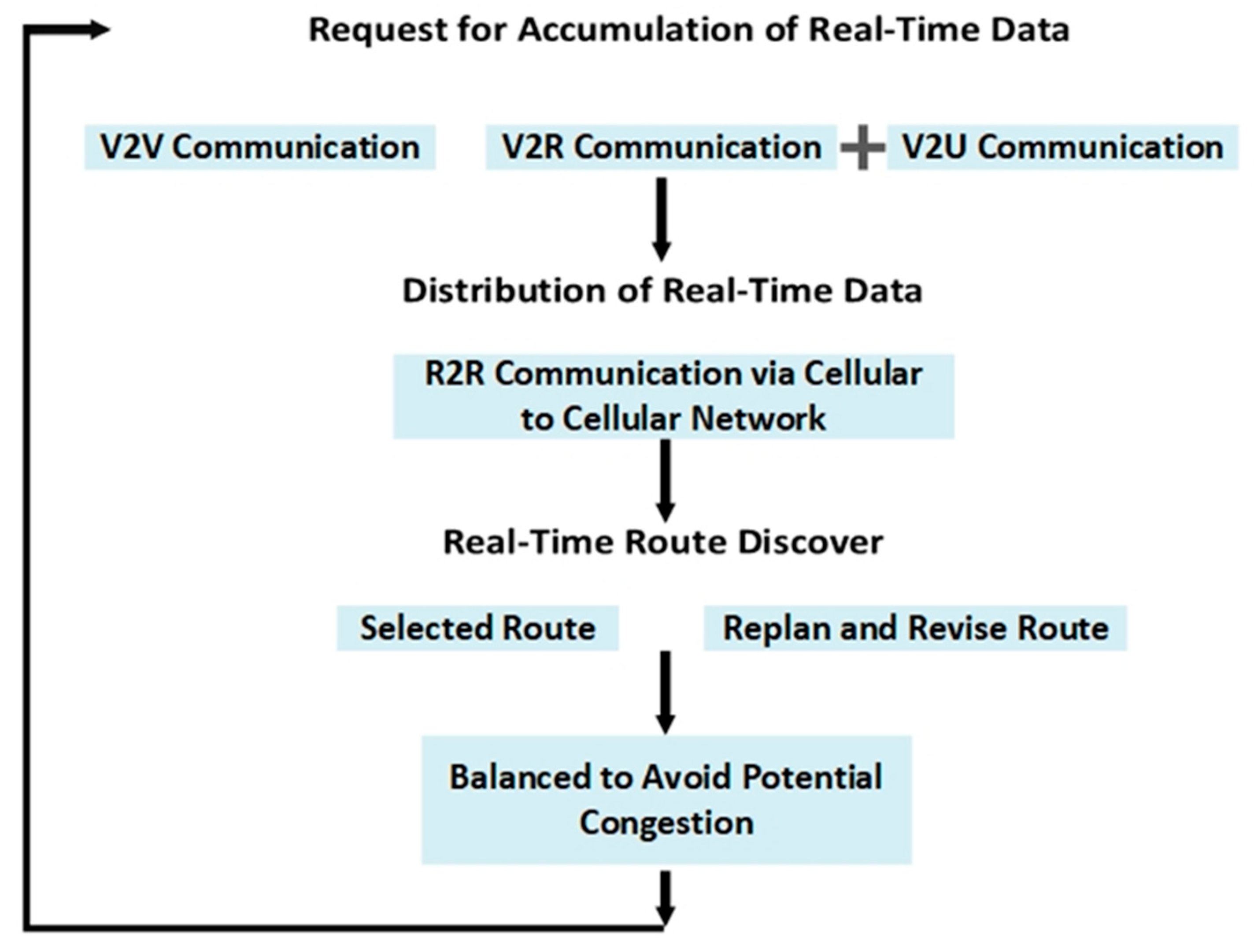
Accumulate and Distribute Real-Time Data: We propose an innovative idea that can accumulate and distribute current-time data as well as take immediate steps to prevent congestion at the road intersections. This section will describe our proposed mechanism for current-time information-sharing between nodes to RSUs and UAVs at intersections. The analysis of complexity and intensity demonstrates that the proposed current-time traffic data accumulation and sharing mechanism can transfer information in current-time to the entire network between RSUs, UAVs, and vehicles. We have already mentioned that traffic information stored in RSU memory is divided into two classes. One is static data, containing all information about traffic networks, and previous congestion history; nodes can download static information through V2R communications and reduce measurement errors. Static traffic data are updated between RSUs after a definite period of time. For dynamic traffic data, such as unexpected traffic collisions or congestions, RSU’s current-time information accumulation and sharing mechanism will immediately transmit these dynamic current-time traffic data over the traffic network instead of periodically updating them. For our proposed model, the current-time traffic information-sharing mechanism for RSU’s is broadcast. The broadcasting technique for information sharing has excellent performance. Moreover, our proposed current-time traffic information-sharing mechanism encompasses the entire transmitted traffic network, which likely to be useful for other nodes on the road segments.
RSU Setup Process: In our proposed system, all RSUs are connected via existing cellular networks because of reducing RSU setup costs. There is no need to create a new network setup for RSUs. We are using a carry and forward mechanism in our model to reduce the cost of creating a new RSU network. We proposed to place RSUs at an intersection. One intersection to another intersection distance could be 5 km to 10 km, and make a wired or wireless connection between RSU to RSU quite impossible because urban area obstacles are so high. To remove those redundancies, we proposed all of our RSUs be connected with the existing cellular network. We assume that all RSUs and UAVs are equipped with a single omnidirectional antenna with unitary gain. Nowadays, cellular technology is well developed and 5G systems are in our hands. We proposed a different and unique idea for avoiding congestion before it occurs. It is known that issue prevention is better than regulation.
Route Discover and Selection Process: To discover the shortest path from the source to the destination, at first from the source, all the directly connected route distances need to be determined using a digital city map. These distances are the shortest curved metric distance from the source to the destination, where a curve metric distance is a distance determined by using Dijkstra’s famous greedy algorithm based on the geometric shape of the road segments by.
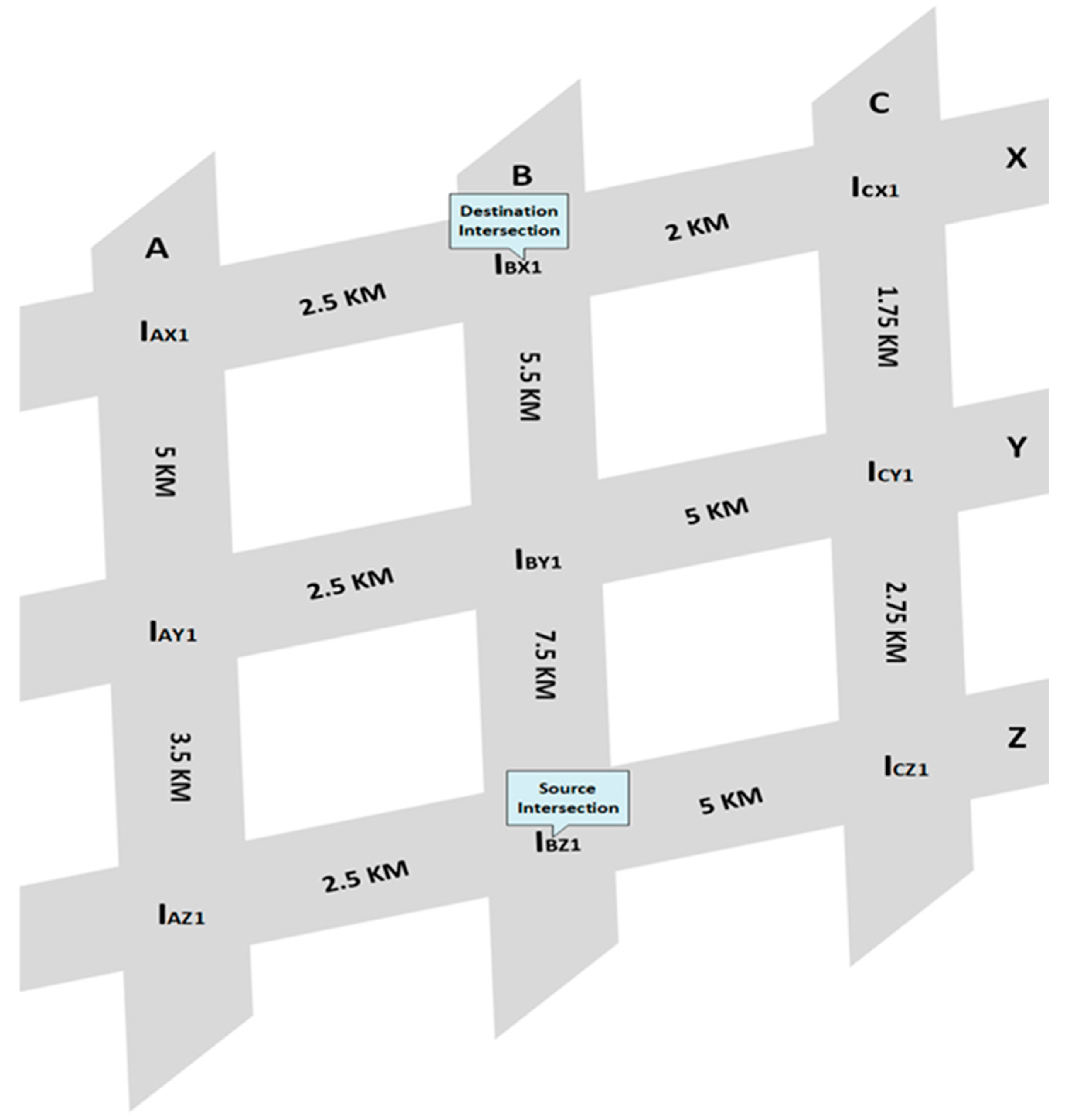
As shown in
Figure 3, there are several road segments and road intersections, assume source intersection (IBZ1) and the destination intersection (IBX1). Hence, the shortest curve metric distance of IBZ1 means selecting the shortest route of these road segments in terms of distance. Using Dijkstra’s famous greedy algorithm, we can choose the shortest route from source intersection to destination intersection. According to this Dijkstra’s algorithm, we can calculate the shortest route in our designed model after applying the shortest route as Distance (v) = (IBZ1 + ICZ1 + ICY1 + ICX1 + IBX1 = 5 + 2.75 + 1.75 + 2 = 11.5 km).
The proof of Dijkstra’s algorithm is derived from the acceptance of the number of visited intersections in
Table 1.
Assumption: For each intersection v, when traveling only through the visited intersection, source to v, distance (v) is the shortest route; if the source to v route does not exist, it is infinite (∞). (Note: We do not assume that distance (v) is the actual shortest route for an unknown intersection.) The basic situation is that there is only one visited intersection, the first intersection, in this case, the assumption is negligible. Otherwise, assume the assumption of n-1 access intersections. For example, we select (v, u) as an edge, where u has the minimum distance (u) of any undefined intersection, and the edge (v, u) makes distance (u) = distance (v) + length (v, u). The distance (u) is considered to be the shortest route from the source to u, because if there is a shorter route, and if w is the first undefined intersection on the route, then according to the original assumption, the distance (w) > distance (u) causes incompatibility. Similarly, if there is a shorter route to u without using an undefined intersection, and if the last intersection on that route is w, then we will get distance (u) = distance (w) + length (w, u), also incompatible. After processing with u, it will still be true that for each undefined intersection w, distance (w) will be the shortest route from the source to w using the visited intersection. If there is a short path that does not go through u, we have already found it, and if there is a short path using u, we will update it during u processing.
After the intersection is visited, the shortest route from source to any intersection v consists only of the visited intersection. Therefore distance (v) is the shortest route.
Balanced to Avoid Potential Congestion: In our model, we are using a simple trick to regulate congestion before it occurs, by previous perception data we can say the maximum probability of congestion period is in the morning and in the afternoon. Basically, on holidays, during this time, the control room takes appropriate action by using UAVs to regulate congestion. We consider our RSUs maximum capacity of fifty nodes at a time in an intersection. If more than fifty nodes at a time appear is an intersection, then the RSU cannot control it. Packet loss will be started before starting this predicament. The control room will take action and quickly launch UAVs to increase the RSUs’ coverage and regulate potential congestion in this intersection.
4. Experiments
In this section, we analyze the performance of our proposed UAV-assisted (UAVa) protocol to study the efficiency of UAVa and compare its overall performance with the traditional routing protocol AODV. We considered the realistic urban scenario in Dhaka, Bangladesh, as shown in
Figure 4a–c.
Figure 4a represents the SUMO software view of our simulated area,
Figure 4b represents the OpenStreetMap view of our simulated area, and
Figure 4c represents the actual geographical view of our simulated area. We used the simulation tool Network Simulator (NS-2.35) to evaluate UAVa [
28]. Using two mobility generator tools, Simulation of Urban Mobility (SUMO) [
29], and VanetMobiSim [
30], to generate realistic movements for vehicles and UAVs, respectively, the tools know the flexibility and sustainability of nodes movement. The hybrid random walk mobility model for UAVs describes the UAV movement which may cover congested intersection areas. Geographic data were imported from OpenStreetMap (OSM) to integrate the road layout into our simulation [
30].
- A.
Simulation Setup:
The vehicle simulation was conducted in the 9000 m × 4000 m area shown in
Figure 4c. The initial position of the node is distributed randomly. This urban map is stretched, encompassing nearly 20 intersections and 46 road segments. The vehicles moved with speed not more than 40 km/h, and UAVs moved with speed not more than 60 km/h. We assumed that the coverage area of all RSUs did not surpass 200 m, and UAVs did not surpass 300 m.
To simulate this network, we used 106 vehicles, 15 RSUs, and 4 UAVs. The simulation parameters are given in
Table 2. The communication range of the node is set to 200 m, and the channel’s data transmission rate is set to 6 Mbps. We used the IEEE 802.11p specification for implementation of the MAC layer. For each node pair (source-destination), and packet size (512 bytes), we found the data from Constant Bit Rate (CBR). We also adopted User Datagram Protocol (UDP) and Transmission Control Protocol (TCP) as transportation layer protocols for our project, UDP for RSU to Vehicle, UAV to Vehicle, and RSU to UAV communications and TCP for internal communication between cellular networks.
In our project, we are using UAVs as a relay on an emergency basis to make our simulations more accurate. Hello packets are broadcasted every 1 (s). It is worth mentioning that the transmission range of vehicles and RSUs are considered the same when communicating between them (≈200 m), and the transmission ranges of nodes and UAVs in congested intersections will be considered the same when the same communication is established (≈300 m).
Based on multiple tests in the simulation environment, we can say that the chances of success in radio transmission between RSU and UAV are great. The probability of success is too high for hybrid radio transmission (between RSUs and cellular networks). In order to evaluate the simulation protocol more realistically, the initial geographic location of the node and RSU has been well allocated through the network. UAVs and nodes’ mobility is regulated, as their movement is restricted only in the simulated area. Every simulation has a total time set to 180 s.
The other simulation parameters are summarized in
Table 2. Certain parameters were chosen based on previous research [
8,
31,
32,
33]. In this way, based on multiple metrics, some evaluation indicators are estimated, such as the average throughput, the instant throughput, the packet delivery ratio, the residual energy, and the end-to-end delay.
Average throughput: Represents the average rate of successfully receiving packets
Rp over a communication channel from stop time Tsp to start time Ts.
Instant throughput: Represents the packets received successfully at the current time and packet size R (Receive packets
Rp + Receive packet size Rz) over a communication channel, where time is T, current time Tcs, and previous Time Tps.
Packet Delivery Ratio (PDR): Represents the fraction of the data packets delivered from the source nodes to the destination nodes over a communication channel, where
Rp is the receive packets, and
Rs is the sent packets n represents the number of sensor nodes.
Residual Energy: Represents the remaining node energy, where
E is the total node energy and overall energy consumption
Ec by a node.
End-to-End Delay: Represents the average value of all successfully received packets delay
Dn and receive packet
Rp, the total number of nodes n.
- B.
Experimental Result Analysis:
In this sub-section we will present our experimental results and its analysis.
- i.
Average Throughput:
The average throughput is shown in
Figure 5, with traditional AODV and our proposed UAVa protocol. For both UAVa and AODV protocols, start time is 0 s, stop time is 179 s, UAVa’s received packets are 95,331, and AODV’s received packets are 90,148, average throughput for UAVa is 4.237 kbps, and for AODV is 4.010 kbps. The UAVa performed better than the AODV, which is reasonably justified.
- ii.
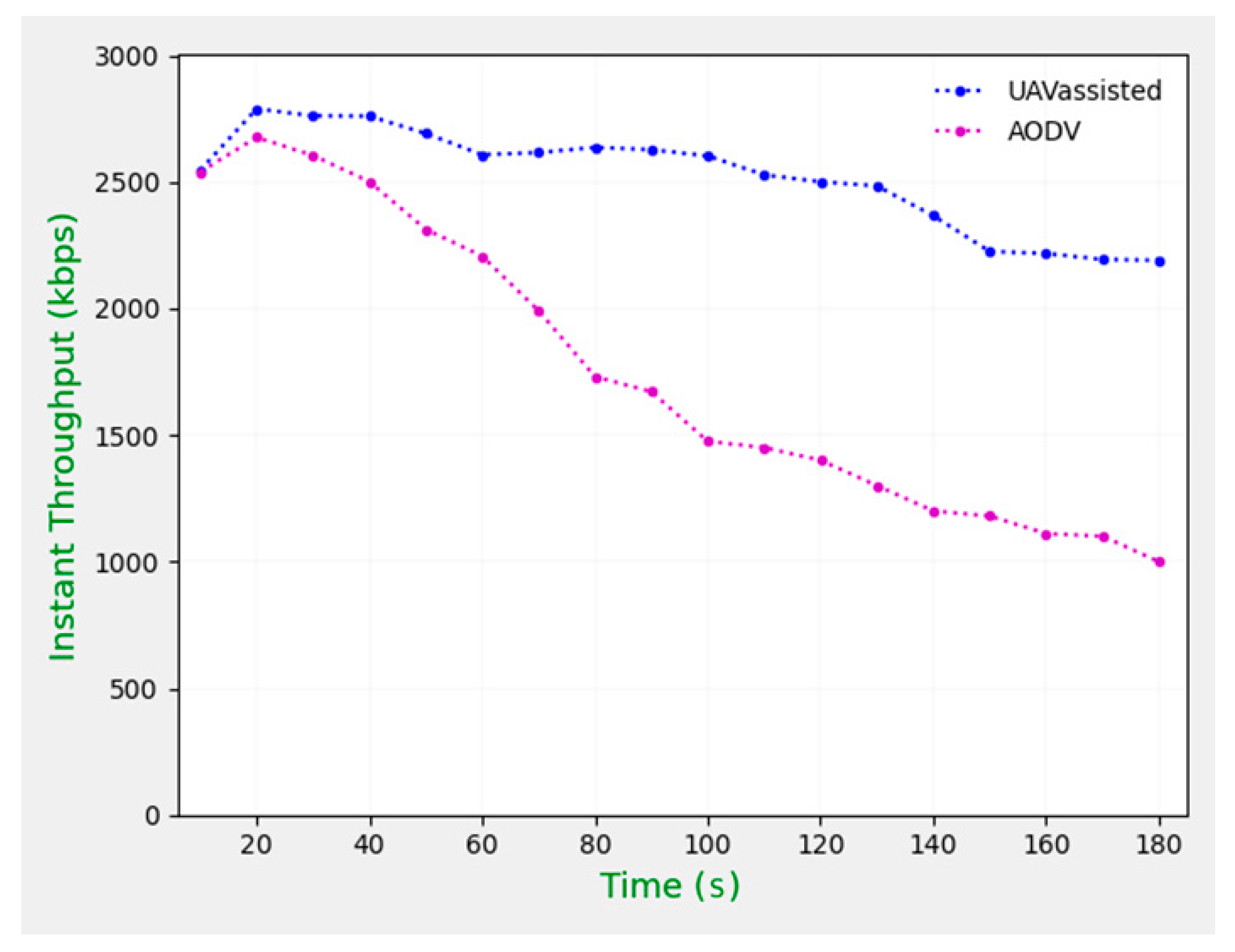
Instant Throughput:
Figure 6 compares instant throughput with a different time periods of simulations for UAVa and AODV protocols. We can consider along with the different time periods, the instant throughput is changed, and for AODV protocol it is changed rapidly, but for the UAVa protocol, it is changed a bit, so we can say that UAVa protocol has performed better than AODV protocol for instant throughput measured in kbps for each case.
- iii.
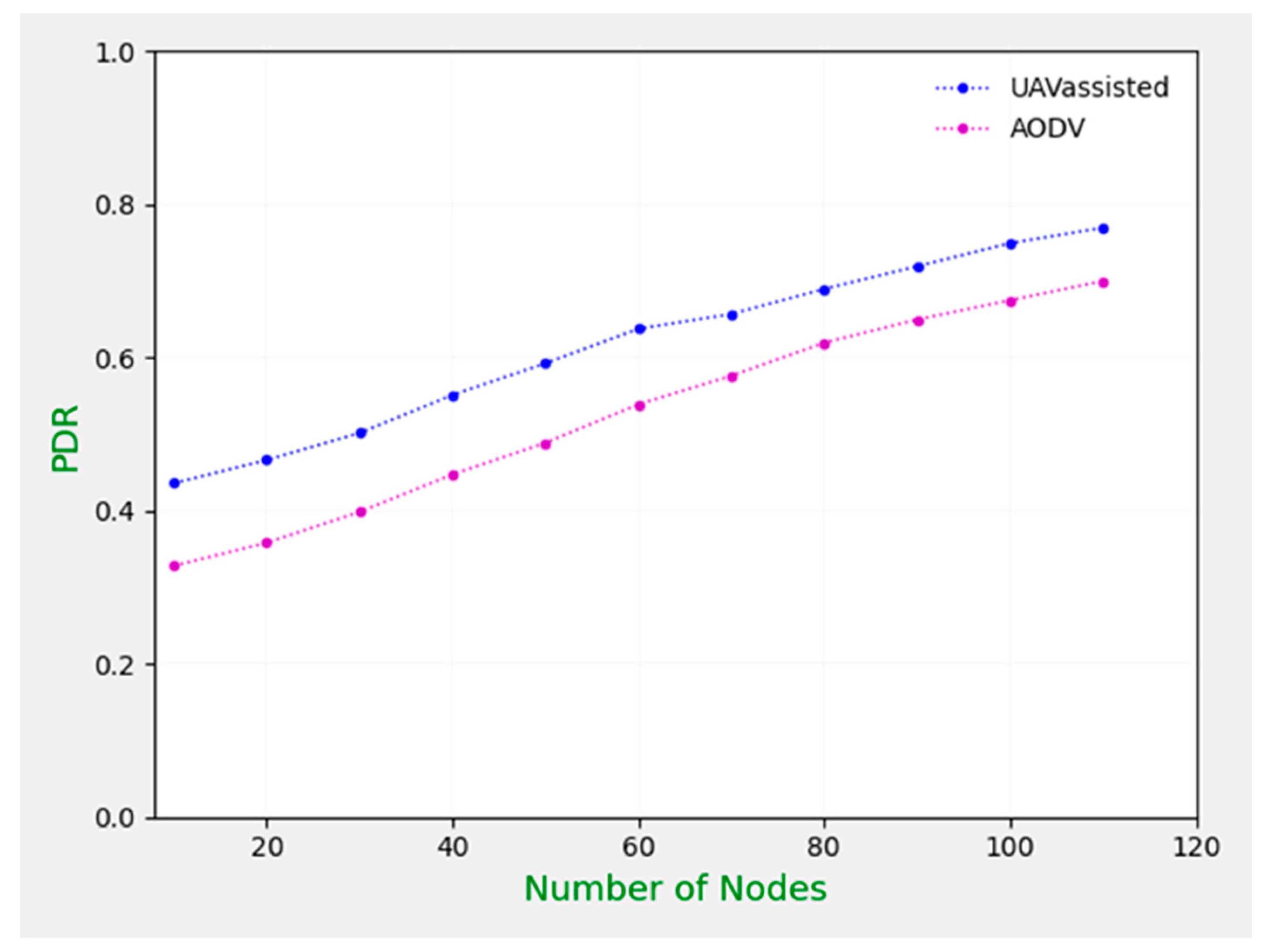
Packet Delivery Ratio (PDR):
Figure 7 shows the variation of PDR for the UAVa and AODV protocols. Here, we can consider according to the increasing number of nodes that packet delivery ratio is increased for both AODV and UAVa protocols, but for UAVa protocols packet delivery ratio is better than AODV. The highest PDR is achieved for UAVa, again proving its effectiveness. It depends on both vehicles and RSUs or UAVs (both RSUs and UAVs can carry packets), which can be checked at all times in the data transmission.
- iv.
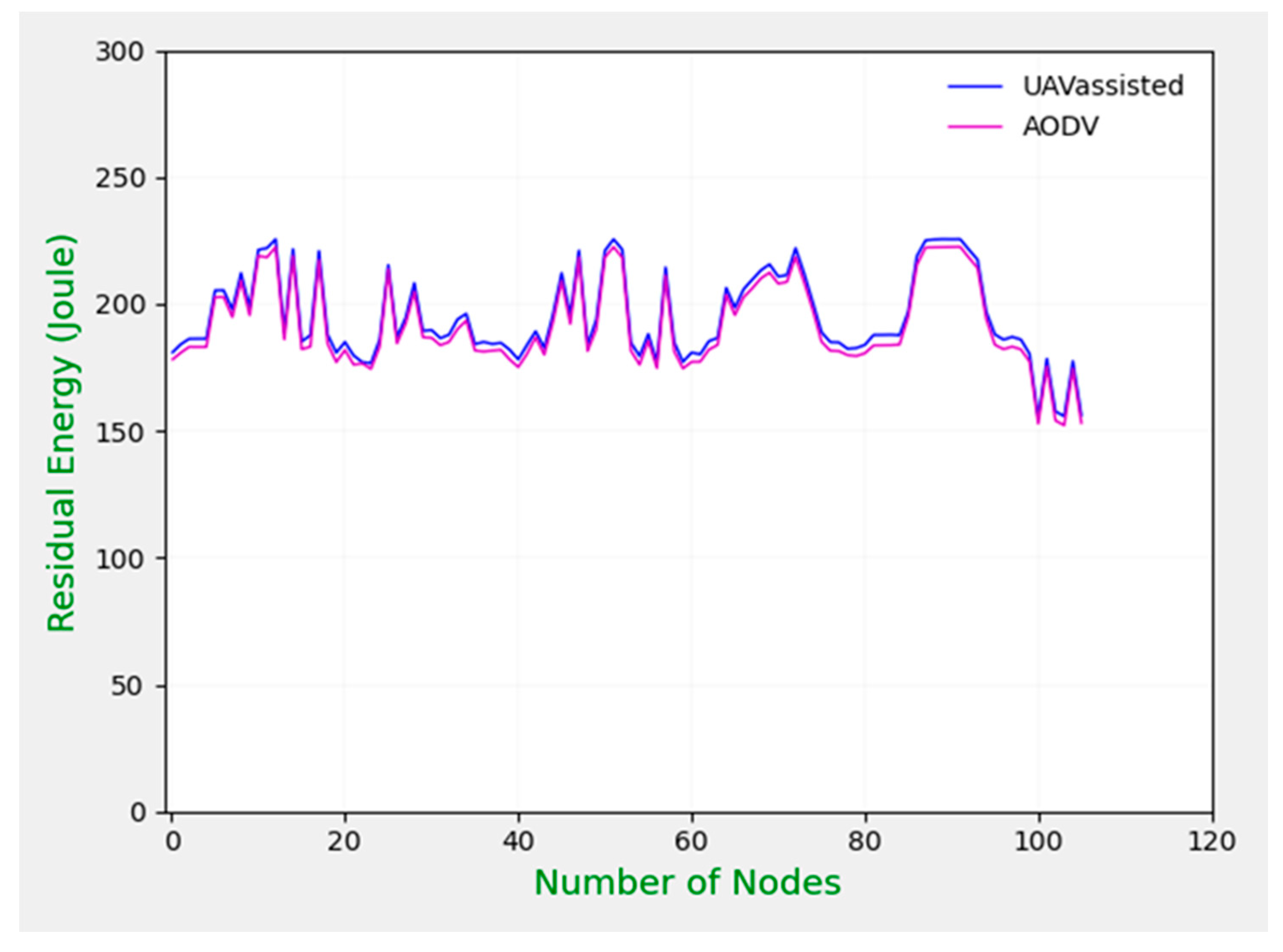
Residual Energy:
Figure 8 shows the residual energy under a varying number of nodes for our proposed UAVa and AODV protocols. We put initial energy as 300 joules for all nodes, transmission power 0.9
W and receiving power 0.7
W, ideal power 0.45
W, sleep power 0.05
W, transition power 0.02
W, and transition time 0.005 s for both UAVa and AODV protocols. After simulation run times, we can calculate remaining energy for all nodes, and it is good news that our proposed UAVa protocol works better than the existing AODV protocol. For UAVa protocol, the remaining energy level is better than the AODV protocol. We can decide that our proposed protocols remaining energy is much better than the AODV protocol. We can call it a new energy saving model for VANETs.
- v.
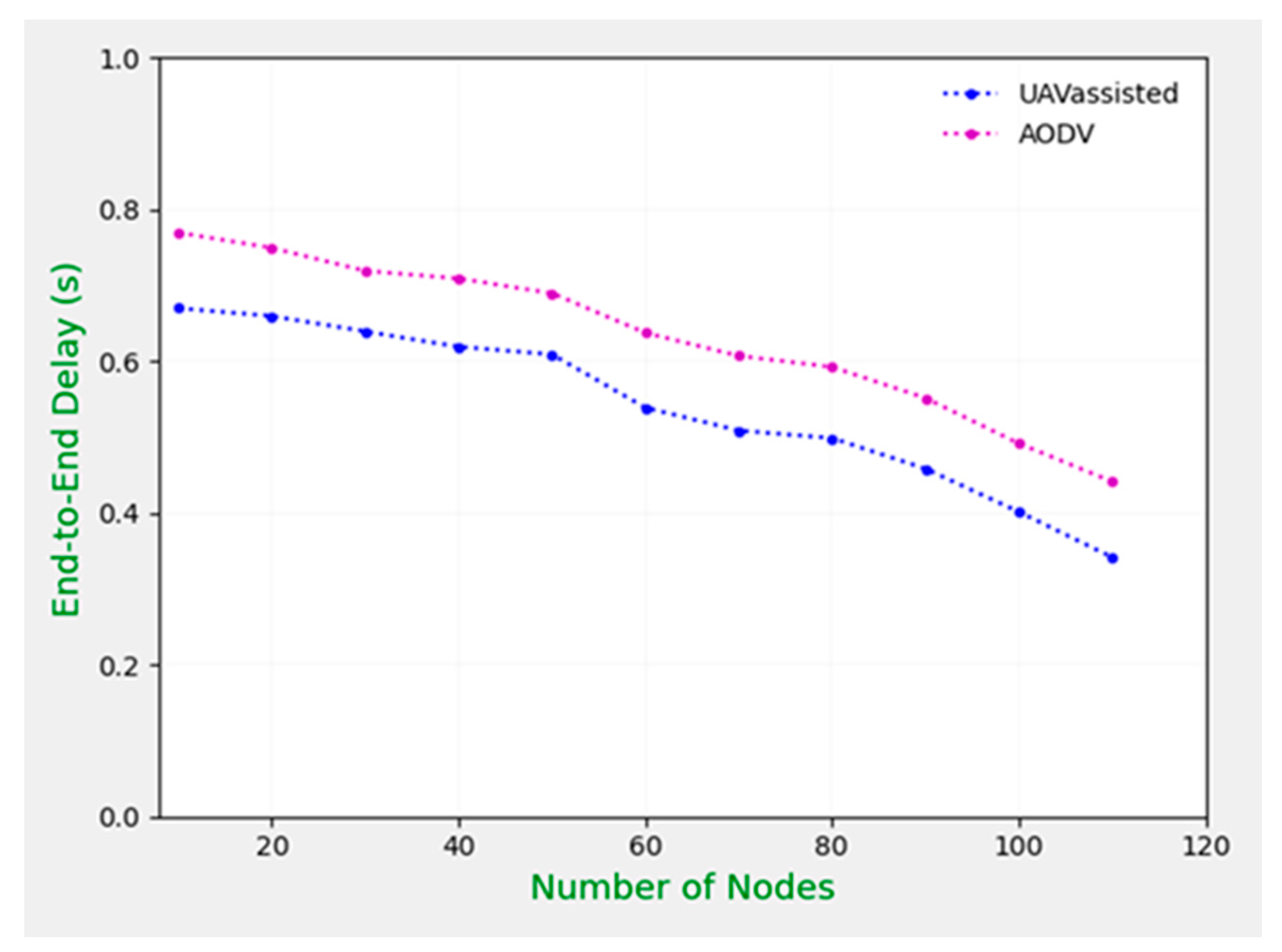
End-to-End Delay:
Figure 9 provides a contrast with static CBR connections with various numbers of nodes and end-to-end delays. In general, as the number of nodes increases, the end-to-end delays decrease for both UAVa and AODV, whereas increasing the number of nodes means increasing the network bandwidth, leading to a reduction in the maximum local situation. Due to the use of RSUs and UAVs, the performance of UAVa is better than AODV.
5. Conclusions
In VANET, nodes travel quickly, and the topology also changes, which is why routing architecture for VANET is very difficult. In this article, we have done an in-depth survey on AODV, which is more appropriate in VANET. The UAVa protocol and its extensions have been implemented to support ad hoc routing within RSUs, UAVs, and VANETs, as well as RSUs themselves. The UAVa protocol is dedicated to urban vehicle environments, and its primary goal is to enhance the performance of routing protocols based on intersections. UAVs are used to assist RSUs when congestions occur in intersections. When vehicle density is too high at intersections, RSUs are also used to route data packets via UAVs. We performed a simulation-based performance assessment of our UAVa protocols and demonstrated the efficacy and robustness of UAVa in terms of adding routing efficiency, average throughput, instant throughput, reduced latency, and improved delivery ratio and residual energy compared to AODV protocols.
In our future work, we will try to reduce the number of RSUs, and save more energy. We intend to apply UAV-assisted along with table-driven routing protocols. A comparative study can also be made based on our proposed work with table-driven routing protocols. UAV-assisted protocols will be strengthened in terms of protection and adapted to other areas such as rural scenarios and highways.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}