Predictive Control Using Active Aerodynamic Surfaces to Improve Ride Quality of a Vehicle





Abstract
:1. Introduction
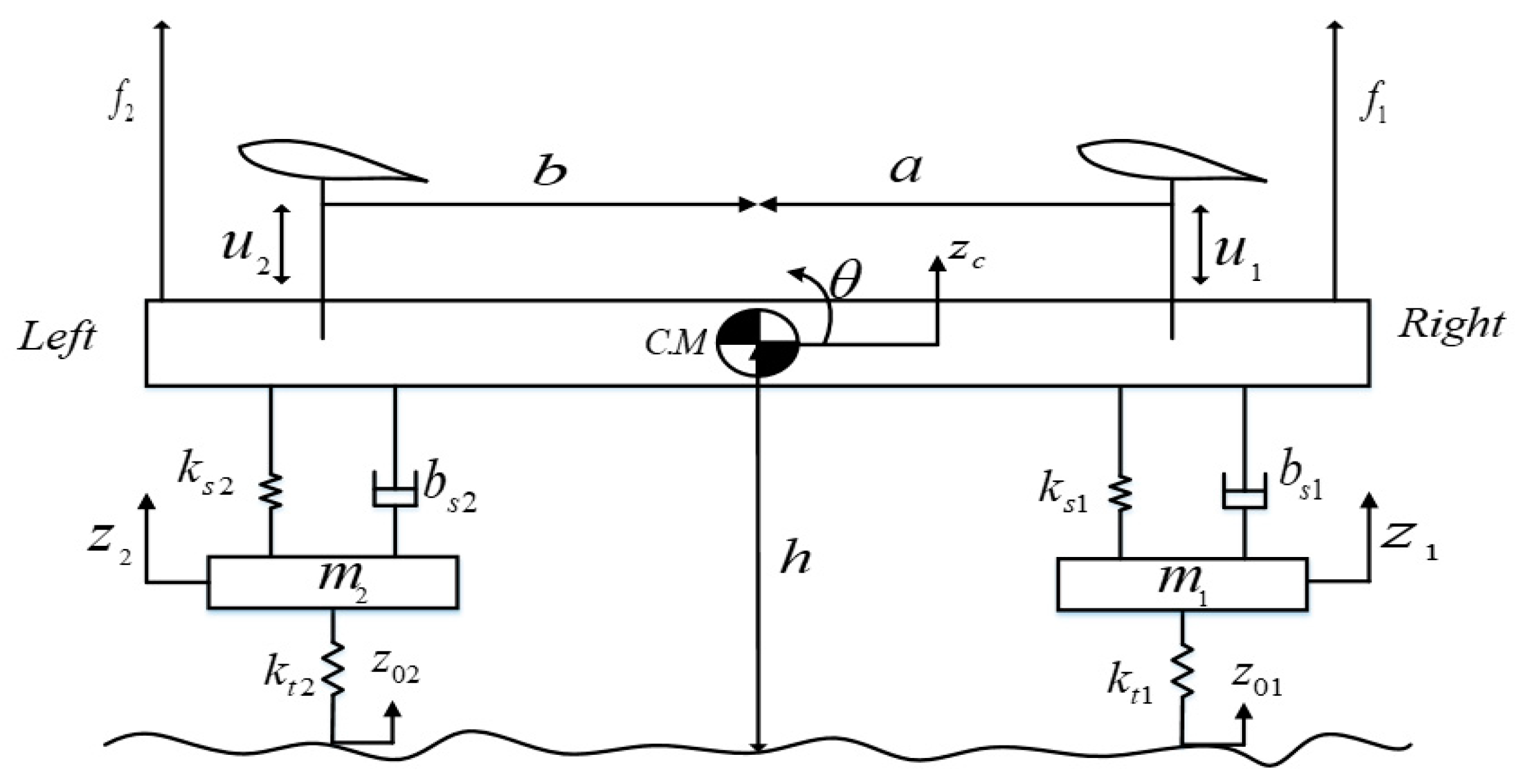
2. Problem Formulation of Four Degrees of Freedom (4-DOF) Half-Car Model
2.1. Desired Roll Angle
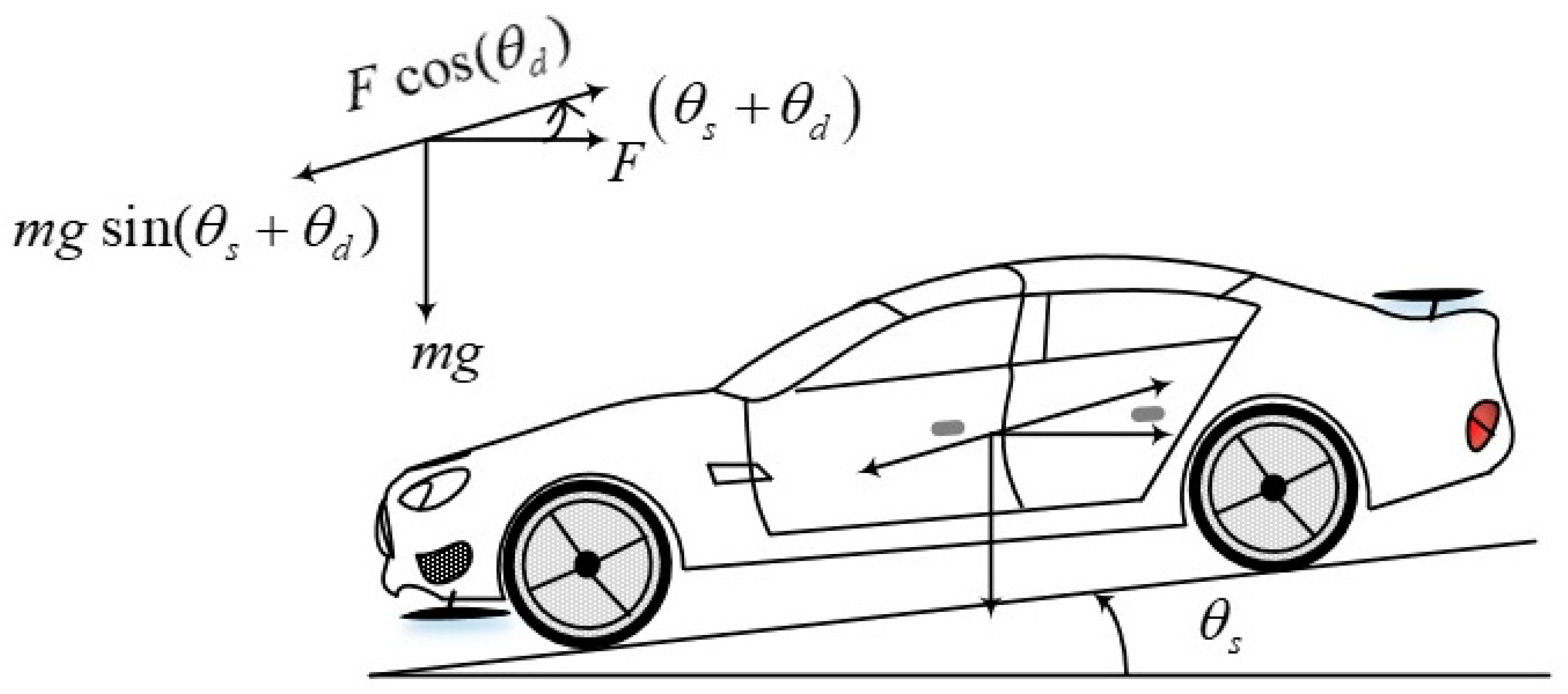
2.2. Desired Pitch Angle
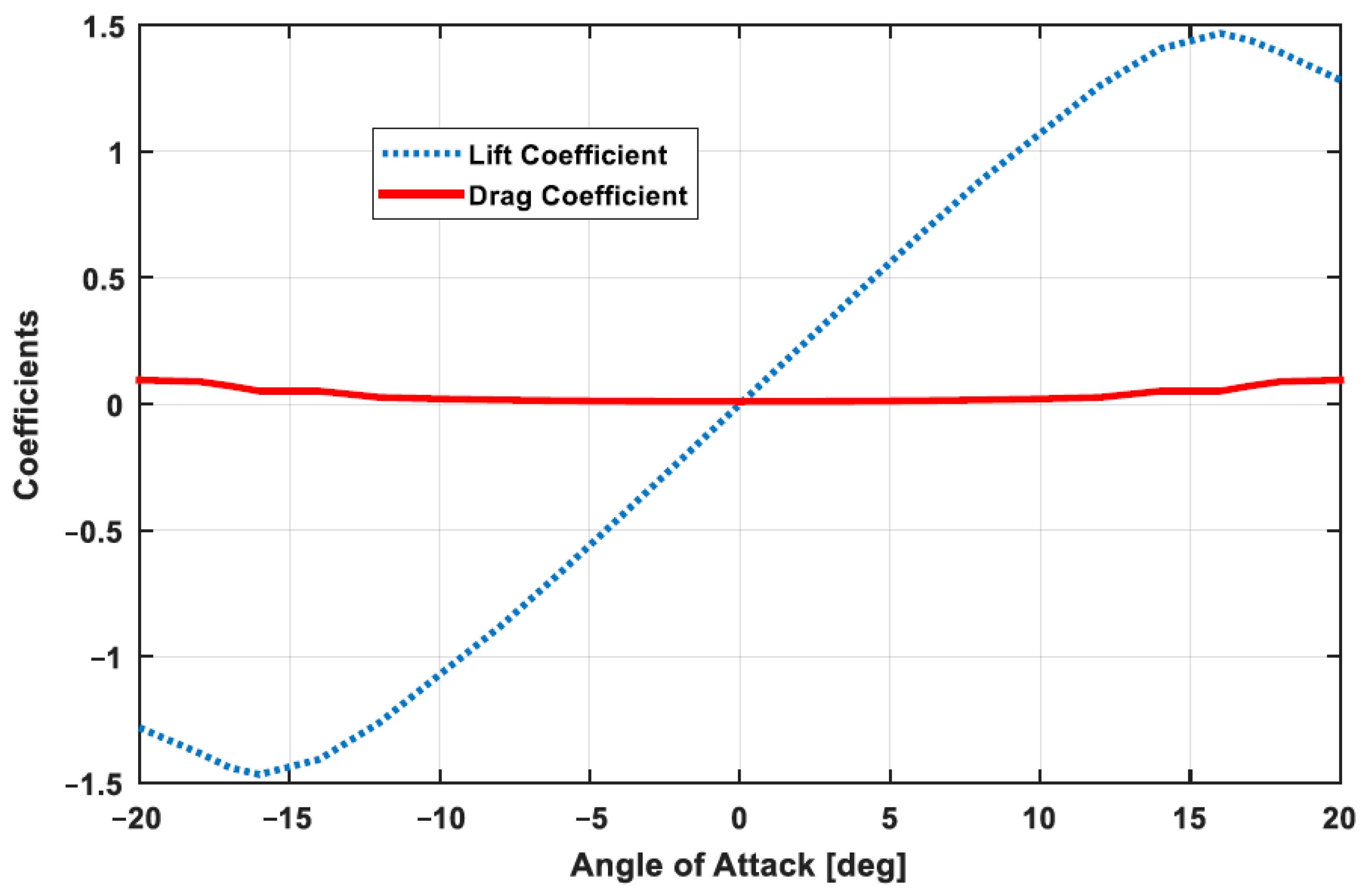
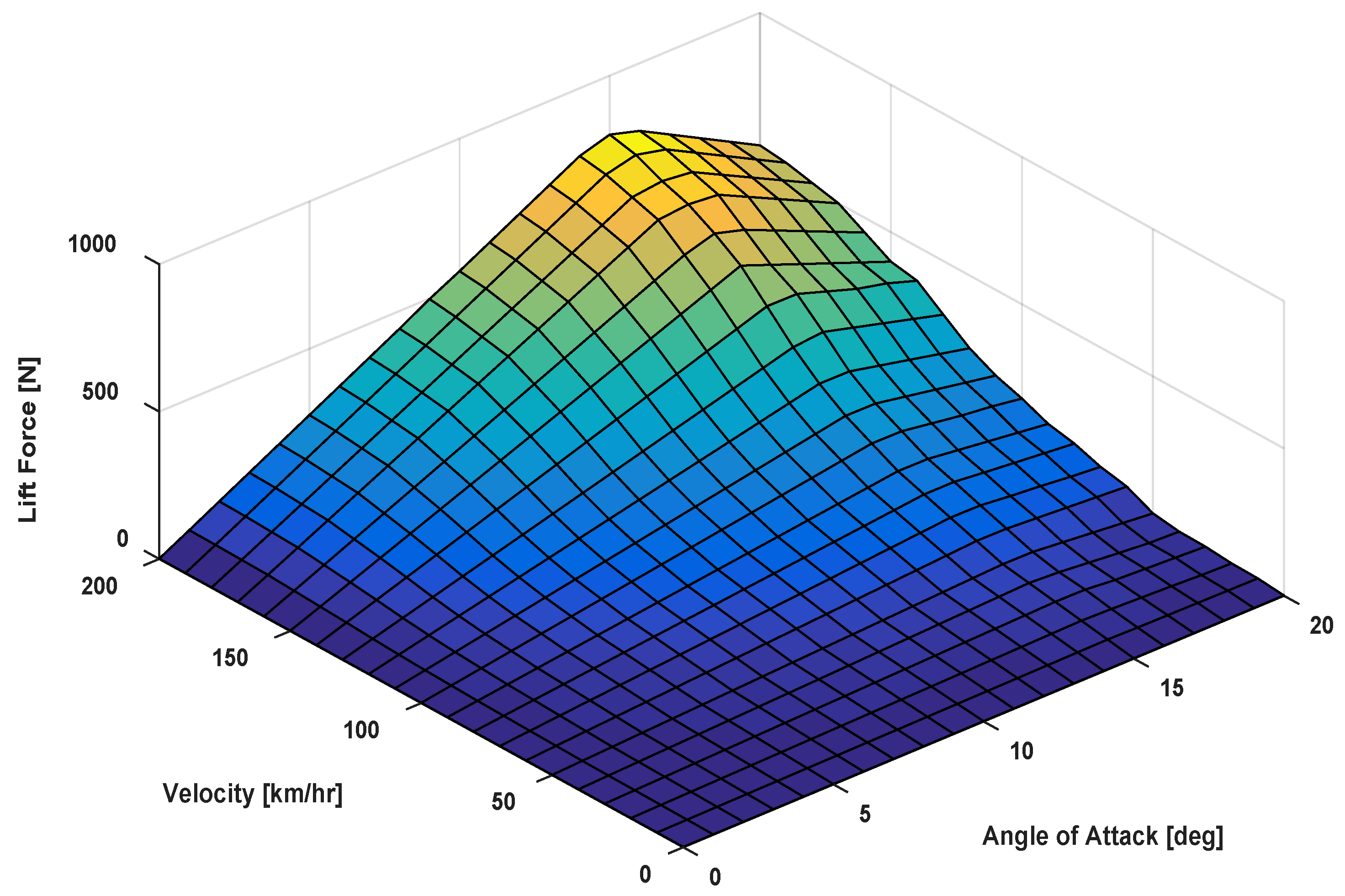
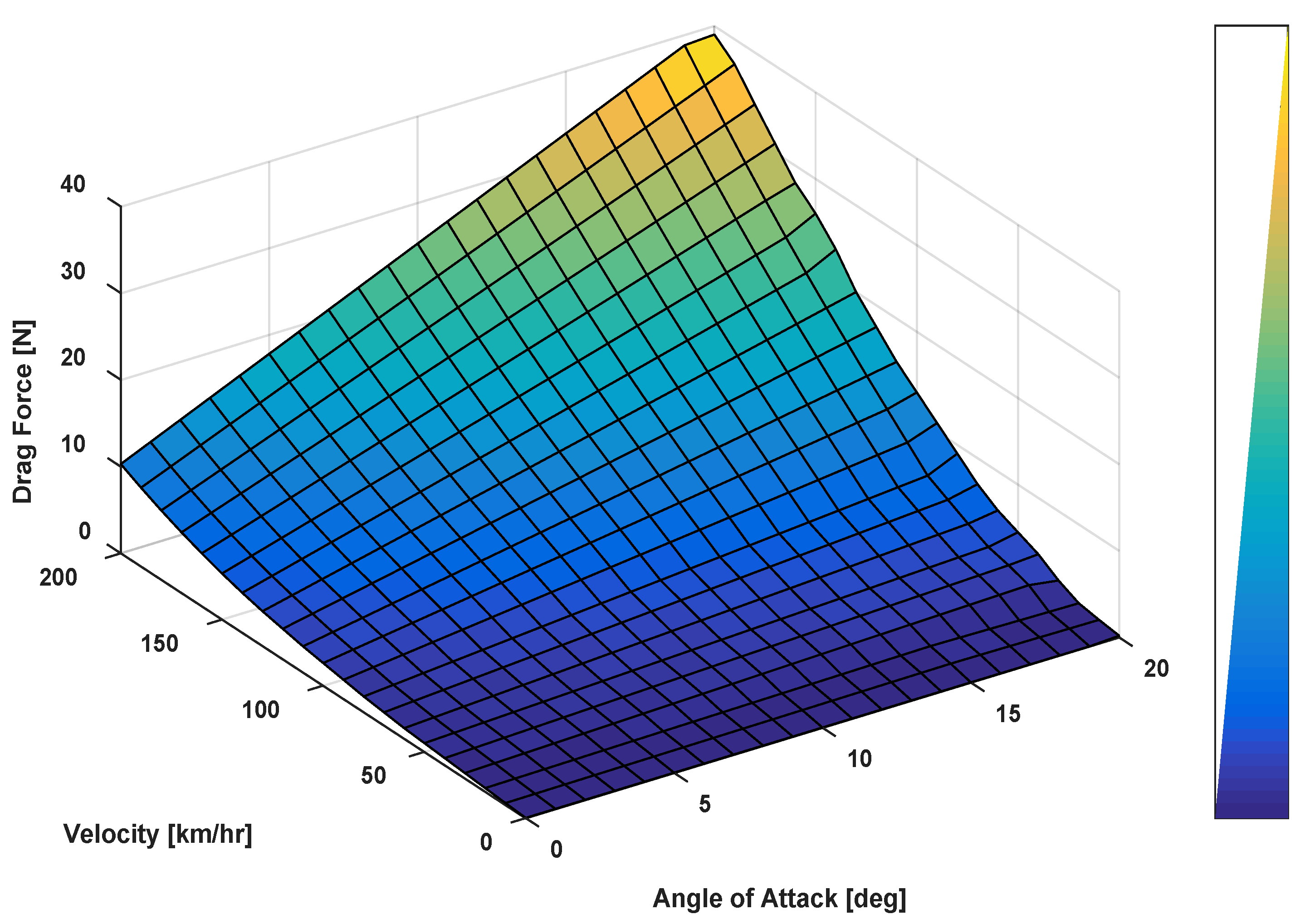
2.3. Aerodynamic Forces
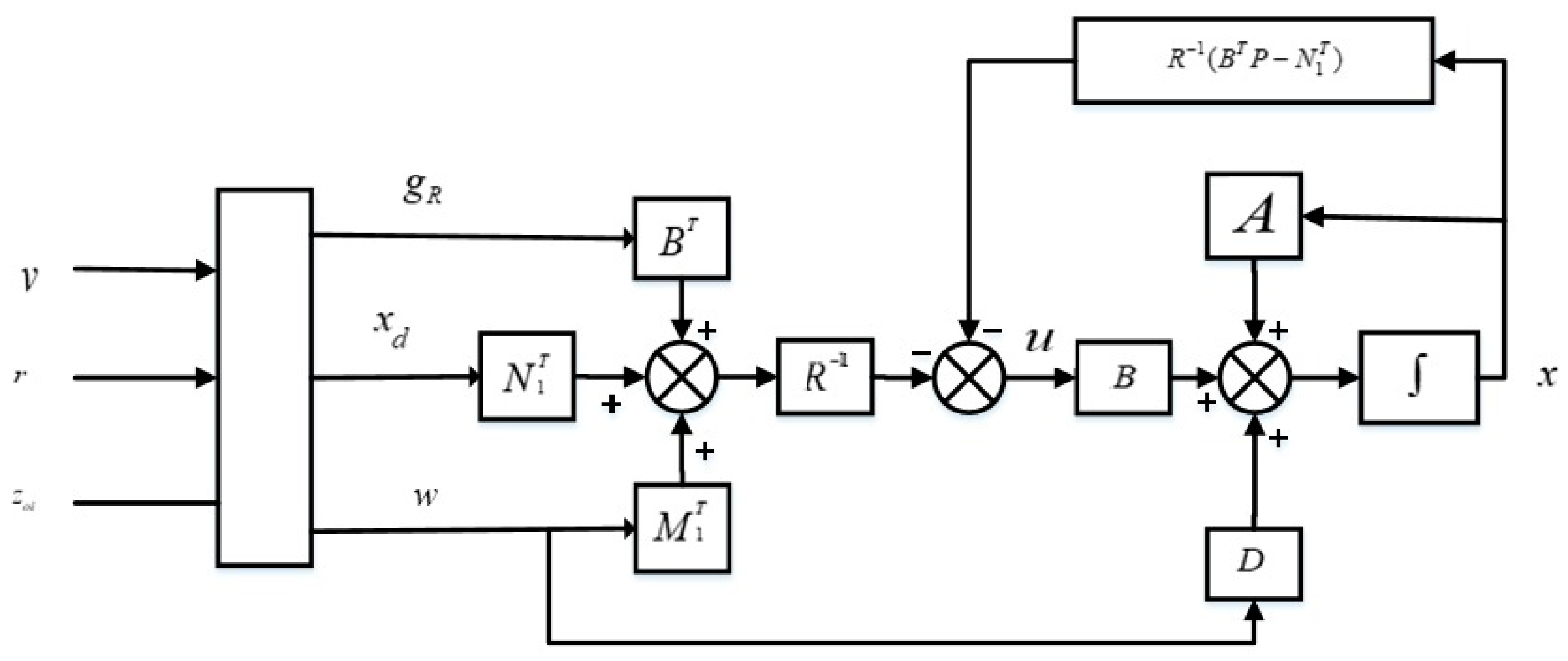
3. Control Strategy
4. Results and Discussion
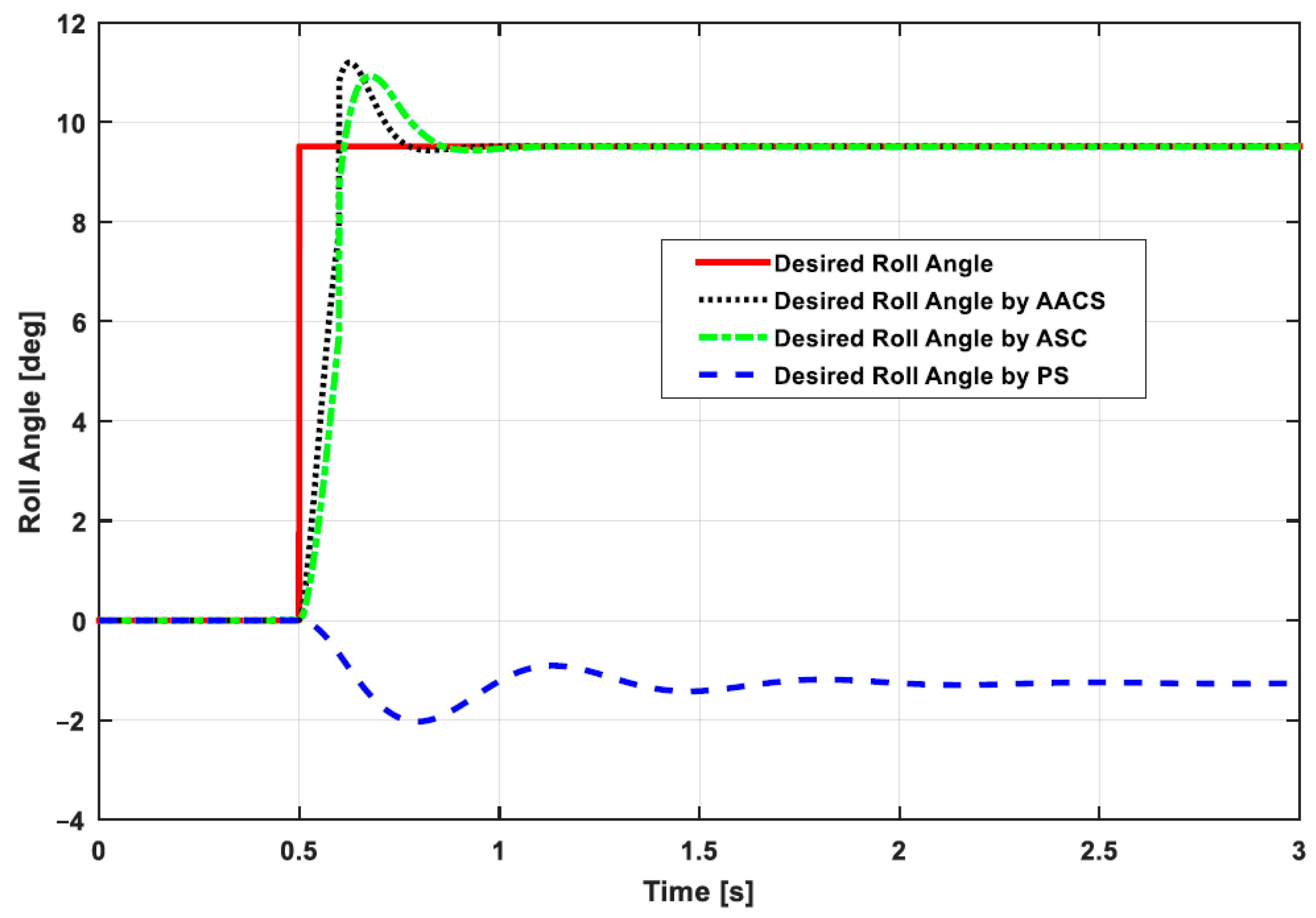
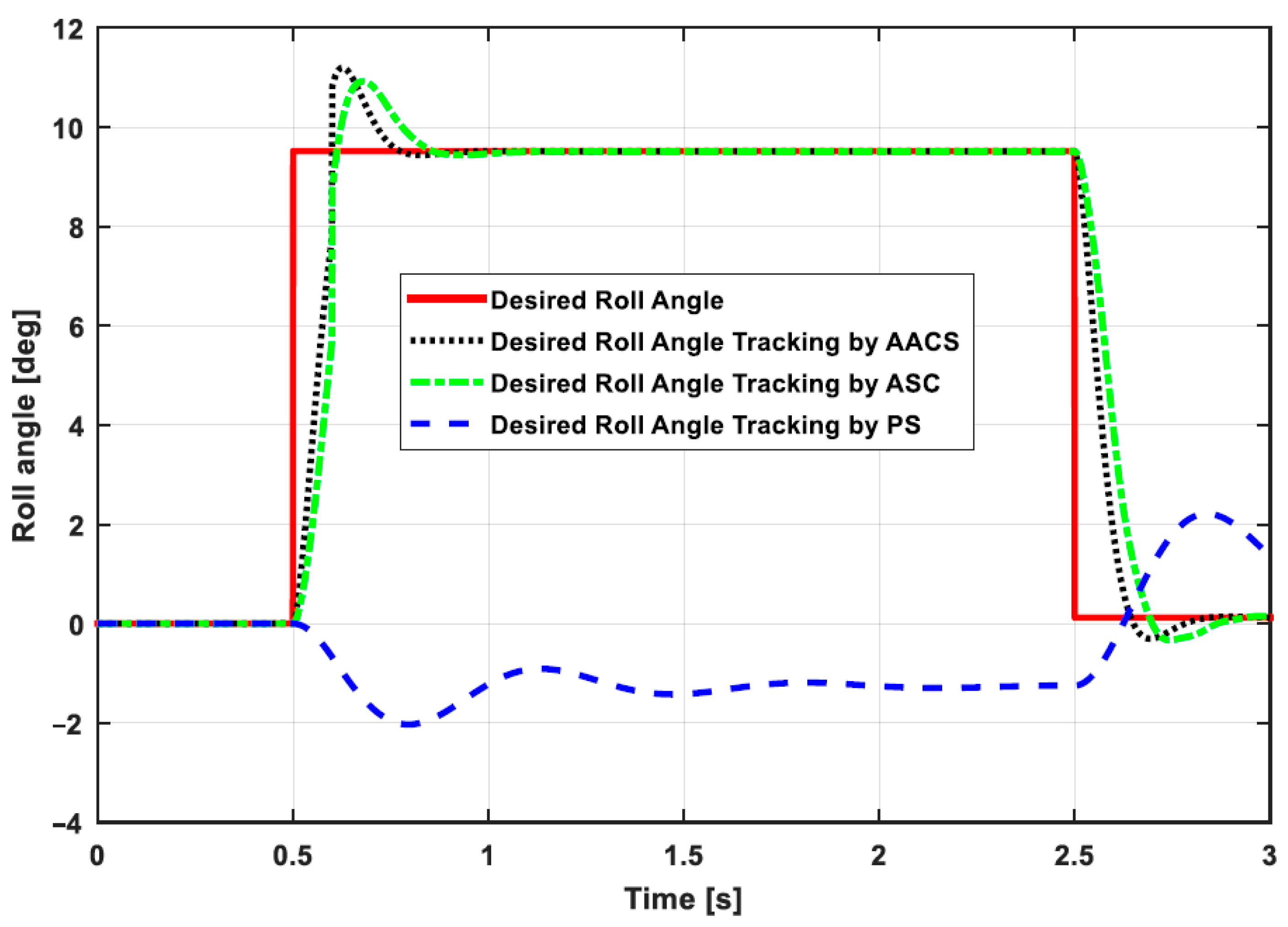
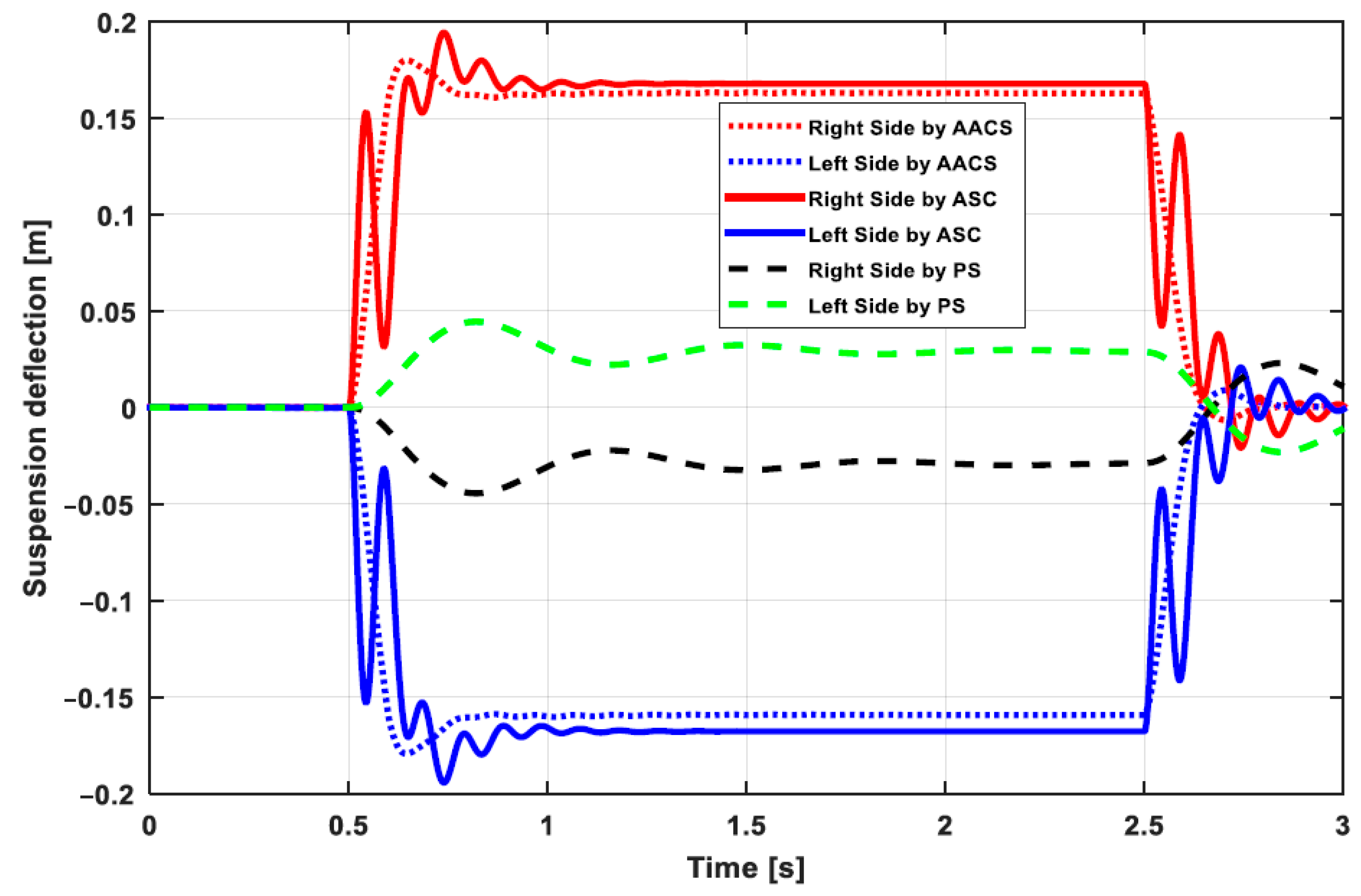
4.1. Desired Roll Angle Tracking
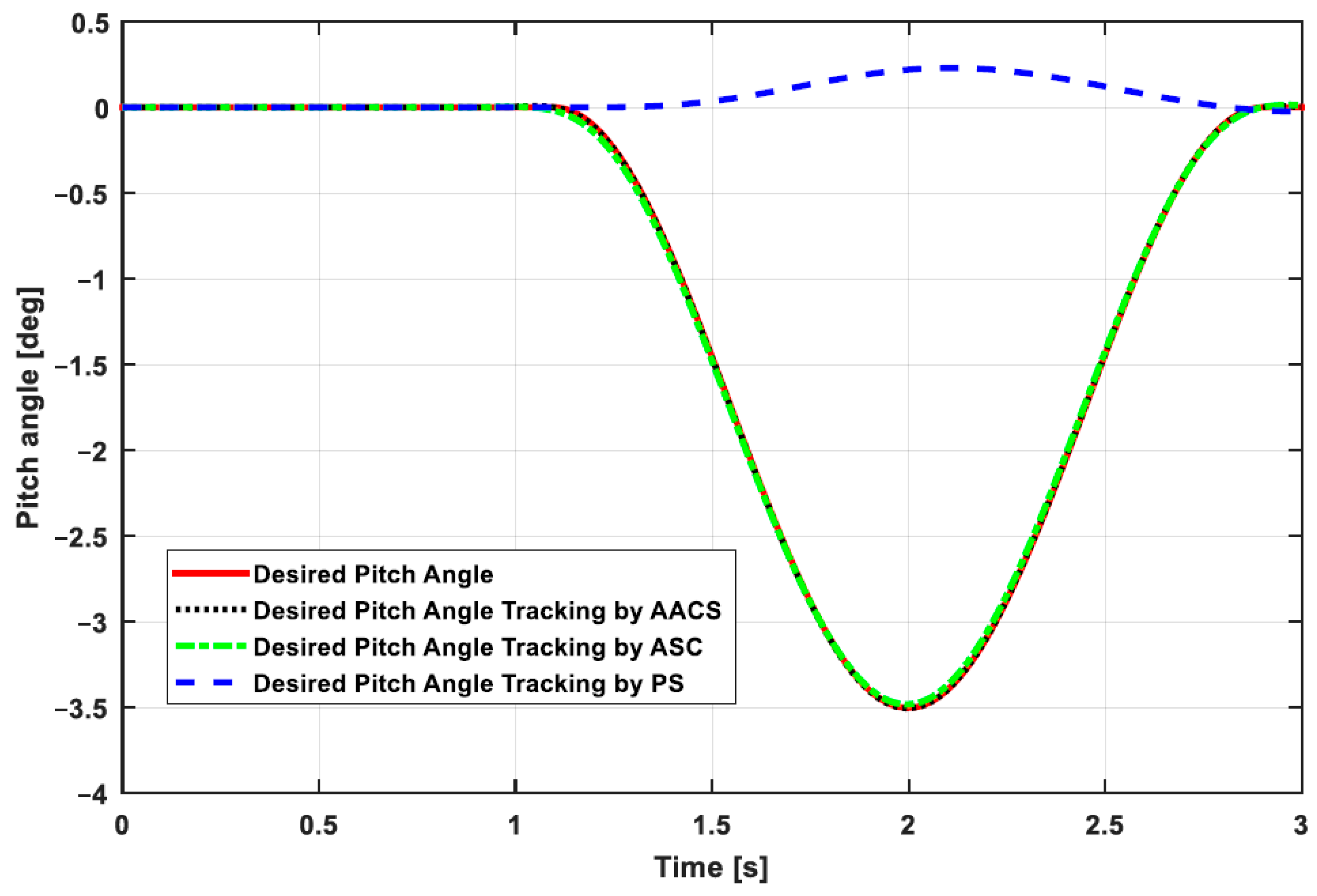
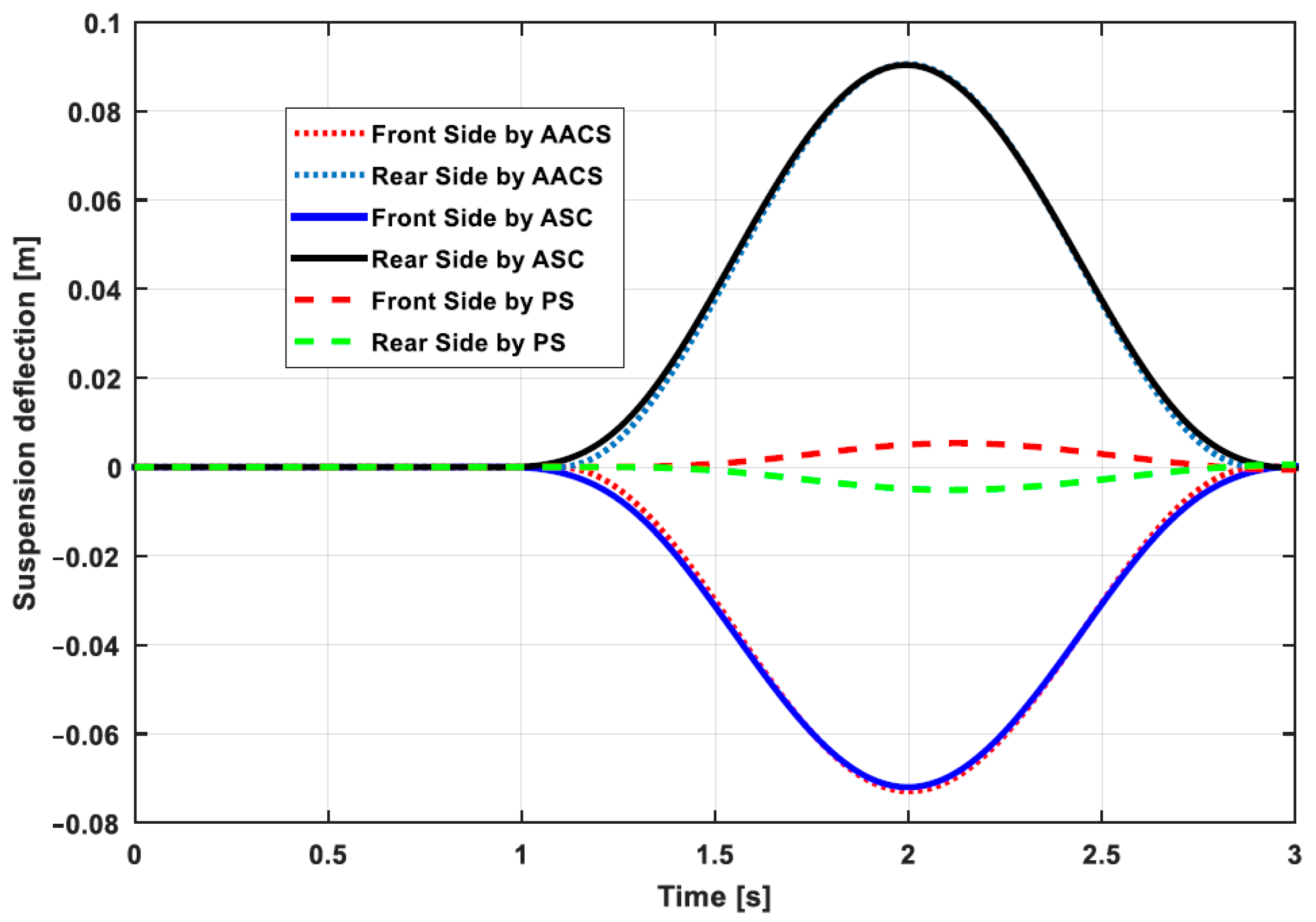
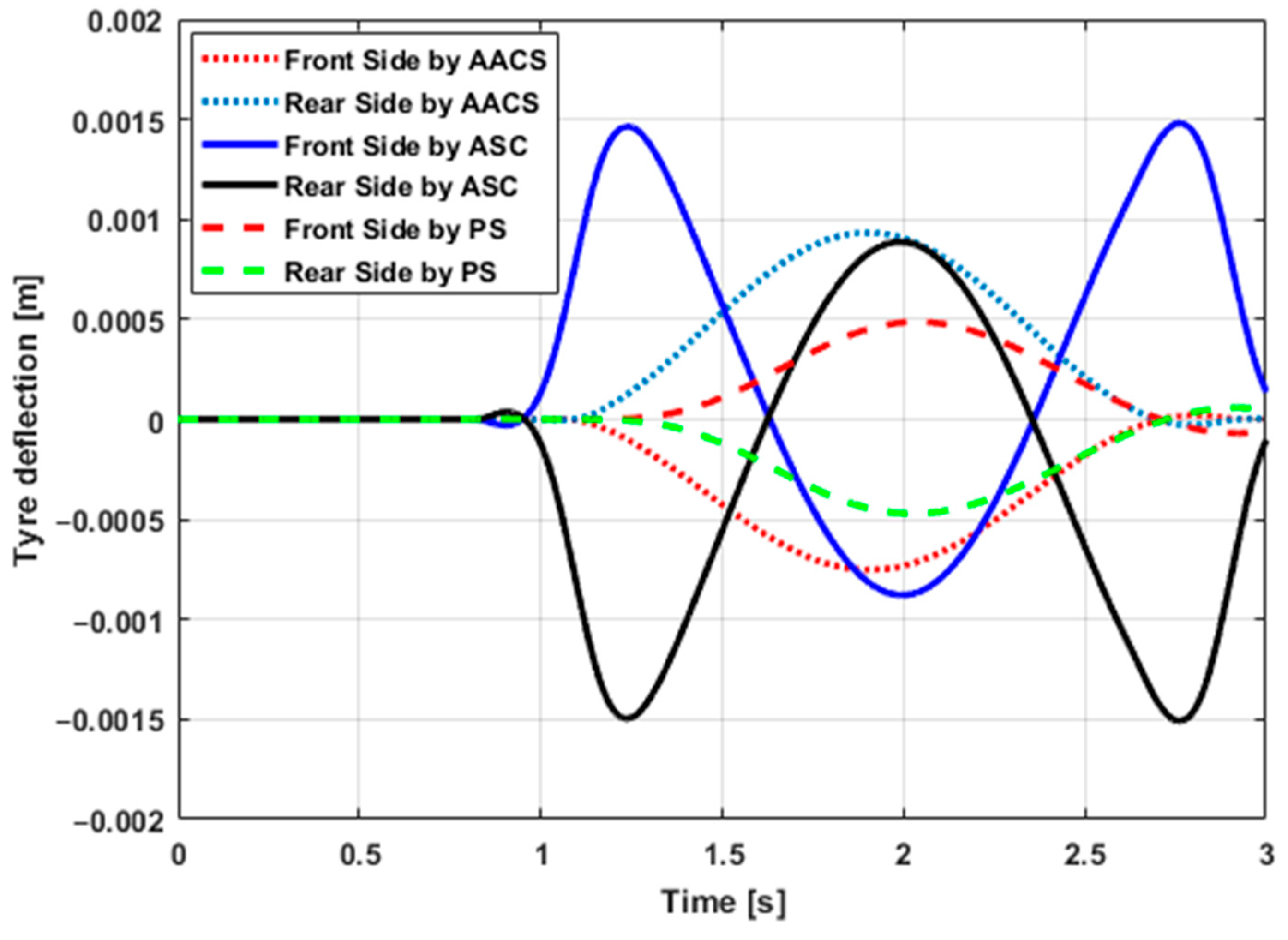
4.2. Desired Pitch Angle Tracking
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Youn, I.; Tchamna, R.; Lee, S.; Uddin, N.; Lyu, S.; Tomizuka, M. Preview suspension control for a full tracked vehicle. Int. J. Automot. Technol. 2014, 15, 399–410. [Google Scholar] [CrossRef]
- Tchamna, R.; Lee, M.; Youn, I. Attitude control of full vehicle using variable stiffness suspension control. Optim. Control Appl. Methods 2015, 36, 936–952. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Serradilla, F.; Nashashibi, F. Speed Control Optimization for Autonomous Vehicles with Metaheuristics. Electronics 2020, 9, 551. [Google Scholar] [CrossRef] [Green Version]
- Iqbal, U.; Samad, A.; Nissa, Z.; Iqbal, J. Embedded control system for AUTAREP-A novel autonomous articulated robotic educational platform. Tehnički Vjesnik-Technical Gazette 2014, 21, 1255–1261. [Google Scholar]
- Iqbal, J.; Ullah, M.; Khan, S.G.; Khelifa, B.; Ćuković, S. Nonlinear control systems-A brief overview of historical and recent advances. Nonlinear Eng. 2017, 6, 301–312. [Google Scholar] [CrossRef]
- Iqbal, J. Modern control laws for an articulated robotic arm. Eng. Technol. Appl. Sci. Res. 2019, 9, 4057–4061. [Google Scholar]
- Doniselli, C.; Mastinu, G.; Gobbi, M. Aerodynamic effects on ride comfort and road holding of automobiles. Veh. Syst. Dyn. 1996, 25, 99–125. [Google Scholar] [CrossRef]
- Qin, Y.; He, C.; Shao, X.; Du, H.; Xiang, C.; Dong, M. Vibration mitigation for in-wheel switched reluctance motor driven electric vehicle with dynamic vibration absorbing structures. J. Sound Vib. 2018, 419, 249–267. [Google Scholar] [CrossRef]
- Nie, S.; Zhuang, Y.; Liu, W.; Chen, F. A semi-active suspension control algorithm for vehicle comprehensive vertical dynamics performance. Veh. Syst. Dyn. 2017, 55, 1099–1122. [Google Scholar] [CrossRef]
- Aleksander, H.; Youn, I. Optimal semi-active suspension with preview based on a quarter car model. In Proceedings of the American Control Conference, Boston, MA, USA, 26–28 June 1991; pp. 433–438. [Google Scholar]
- Aleksander, H.; Youn, I.; Chen, H.H. Control of suspensions for vehicles with flexible bodies—Part I: Active suspensions. J. Dyn. Syst. Meas. Control 1996, 118, 508–517. [Google Scholar]
- Bouazara, M.; Richard, M.J. An optimization method designed to improve 3-D vehicle comfort and road holding capability through the use of active and semi-active suspensions. Eur. J. Mech. A/Solids 2001, 20, 509–520. [Google Scholar] [CrossRef]
- Jia, G.; Li, L.; Cao, D. Model-based estimation for vehicle dynamics states at the limit handling. J. Dyn. Syst. Meas. Control 2015, 137, 1–8. [Google Scholar] [CrossRef]
- Saglam, F.; Unlusoy, Y.S. Adaptive ride comfort and attitude control of vehicles equipped with active hydro-pneumatic suspension. Int. J. Veh. Des. 2016, 71, 31–51. [Google Scholar] [CrossRef]
- Basrah, M.S.; Siampis, E.; Velenis, E.; Cao, D.; Longo, S. Wheel slip control with torque blending using linear and nonlinear model predictive control. Veh. Syst. Dyn. 2017, 55, 1665–1685. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Li, X.; Liu, D. Mine car suspension parameter optimisation based on improved particle swarm optimisation and approximation model. Int. J. Veh. Des. 2019, 80, 23–40. [Google Scholar] [CrossRef]
- Yang, S.; Baddour, N.; Li, C. Design and evaluation of a passive inertial mass device for car suspension system. Int. J. Veh. Des. 2019, 80, 41–58. [Google Scholar] [CrossRef]
- Boufadene, M.; Belkheiri, M.; Rabhi, A.; Hajjaji, A.E. Vehicle longitudinal force estimation using adaptive neural network nonlinear observer. Int. J. Veh. Des. 2019, 79, 205–220. [Google Scholar] [CrossRef]
- Savkoor, A.R.; Chou, C. Application of aerodynamic actuators to improve vehicle handling. Veh. Syst. Dyn. 1999, 32, 345–374. [Google Scholar]
- Savkoor, A. Aerodynamic Vehicle Ride Control with Active Spoilers. Available online: https://ci.nii.ac.jp/naid/10007202754/#cit (accessed on 2 July 2020).
- Savkoor, A.; Manders, S.; Riva, P. Design of actively controlled aerodynamic devices for reducing pitch and heave of truck cabins. JSAE Rev. 2001, 22, 421–434. [Google Scholar] [CrossRef]
- Meijaard, J.; Savkoor, A.; Lodewijks, G. Potential for Vehicle Ride Improvement using both Suspension and Aerodynamic Actuators. In Proceedings of the IEEE International Symposium on Industrial Electronics, Dubrovnik, Croatia, 10–14 July 1995; pp. 385–390. [Google Scholar]
- Corno, M.; Bottelli, S.; Panzani, G.; Tanelli, M.; Spelta, C.; Savaresi, S.M. Improving high speed road-holding using actively controlled aerodynamic surfaces. In Proceedings of the European Control Conference, Zurich, Switzerland, 17–19 July 2013; pp. 1493–1498. [Google Scholar]
- Corno, M.; Bottelli, S.; Panzani, G.; Spelta, C.; Tanelli, M.; Savaresi, S.M. Performance assessment of active aerodynamic surfaces for comfort and handling optimization in sport cars. IEEE Trans. Control Syst. Technol. 2015, 24, 189–199. [Google Scholar] [CrossRef]
- Wu, Y.; Chen, Z. Improving Road Holding and Ride Comfort of Vehicle Using Dual Active Aerodynamic Surfaces. In Proceedings of the 2nd International Conference on Robotics and Automation Sciences, Wuhan, China, 23–25 June 2018; pp. 1–5. [Google Scholar]
- Hosseinian Ahangarnejad, A.; Melzi, S. Numerical analysis of the influence of an actively controlled spoiler on the handling of a sports car. J. Vib. Control 2018, 24, 5437–5448. [Google Scholar] [CrossRef]
- Shahein, A.H.; Ata, A.A.; Haraz, E.H.; El-Souhily, B.M. Vibration suppression of terrains irregularities using active aerodynamic surface for half-car model sport vehicles. J. Vib. Control 2020. [Google Scholar] [CrossRef]
- Gáspár, P.; Szaszi, I.; Bokor, J. Reconfigurable control structure to prevent the rollover of heavy vehicles. Control Eng. Pract. 2005, 13, 699–711. [Google Scholar] [CrossRef]
- Goodall, R. Tilting trains and beyond-the future for active railway suspensions. Part 1: Improving passenger comfort. Comput. Control Eng. J. 1999, 10, 153–160. [Google Scholar] [CrossRef]
- Wang, J.; Shen, S. Integrated vehicle ride and roll control via active suspensions. Veh. Syst. Dyn. 2008, 46, 495–508. [Google Scholar] [CrossRef]
- Wu, Z.; Liu, Y.; Pan, G. A smart car control model for brake comfort based on car following. IEEE Trans. Intell. Transp. Syst. 2008, 10, 42–46. [Google Scholar]
- Tchamna, R.; Youn, E.; Youn, I. Combined control effects of brake and active suspension control on the global safety of a full-car nonlinear model. Veh. Syst. Dyn. 2014, 52, 69–91. [Google Scholar] [CrossRef]
- Youn, I.; Wu, L.; Youn, E.; Tomizuka, M. Attitude motion control of the active suspension system with tracking controller. Int. J. Automot. Technol. 2015, 16, 593–601. [Google Scholar] [CrossRef]
- Youn, I.; Youn, E.; Khan, M.A.; Wu, L.; Tomizuka, M. Combined effect of electronic stability control and active tilting control based on full-car nonlinear model. In Proceedings of the Dynamics of Vehicles on Roads and Tracks: Proceedings of the 24th Symposium of the International Association for Vehicle System Dynamics, Graz, Austria, 17–21 August 2015; p. 345. [Google Scholar]
- Liang, W.; Khan, M.A.; Youn, E.; Youn, I.; Tomizuka, M. Attitude motion control of vehicle including the active passenger seat system. Int. J. Veh. Des. 2018, 78, 131–160. [Google Scholar] [CrossRef]
- Ahmad, E.; Song, Y.; Khan, M.A.; Youn, I. Attitude Motion Control of a Half car Model with Tracking Controller Using Aerodynamic Surfaces. In Proceedings of the International Automatic Control Conference 2019, Keelung, Taiwan, 13–16 November 2019; pp. 1–6. [Google Scholar]
- Savaresi, S.M.; Poussot-Vassal, C.; Spelta, C.; Sename, O.; Dugard, L. Semi-Active Suspension Control Design for Vehicles; Elsevier: London, UK, 2010. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value | Unit |
|---|---|---|---|
| Vehicle body mass | 500 | ||
| Moment of inertia | 200 | ||
| Vehicle unsprung mass | 25 | ||
| Suspension stiffness | 18 | ||
| Tyre stiffness | 1 | ||
| Damping coefficients | 1 | ||
| Distance of center of mass from mount points | 0.74 | ||
| Distance of center of mass from the ground | 0.7 |
| Parameter | Active Aerodynamics Control System | Active Suspension Control | Passive System |
|---|---|---|---|
| Suspension deflection | 0.084 | 0.866 | 0.0143 |
| Tyre deflection | 8.43 × 10−4 | 0.0026 | 0.0014 |
| Rolling | 0.009 | 2.6158 | 5.21 × 10101 |
| Parameter | Active Aerodynamics Control System | Active Suspension Control | Passive System |
|---|---|---|---|
| Suspension deflection | 0.163 | 0.167 | 0.0282 |
| Tyre deflection | 0.001 | 0.0052 | 0.0028 |
| Rolling | 0.015 | 0.066 | 1.0082 × 1010 |
| Parameter | Active Aerodynamic Control System | Active Suspension Control | Passive System |
|---|---|---|---|
| Suspension deflection | 1.05 | 8.4 | 0.0004 |
| Tyre deflection | 0.0044 | 0.1103 | 0.0050 |
| Rolling | 0.033 | 0.3599 | 61.86 |
| Parameter | Active Aerodynamic Control System | Active Suspension Control | Passive System |
|---|---|---|---|
| Suspension deflection | 5.06 | 6.28 | 0.0267 |
| Tyre deflection | 0.7868 | 0.8654 | 0.0023 |
| Rolling | 2.14 | 2.569 | 384.68 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, E.; Iqbal, J.; Arshad Khan, M.; Liang, W.; Youn, I. Predictive Control Using Active Aerodynamic Surfaces to Improve Ride Quality of a Vehicle. Electronics 2020, 9, 1463. https://doi.org/10.3390/electronics9091463
Ahmad E, Iqbal J, Arshad Khan M, Liang W, Youn I. Predictive Control Using Active Aerodynamic Surfaces to Improve Ride Quality of a Vehicle. Electronics. 2020; 9(9):1463. https://doi.org/10.3390/electronics9091463
Chicago/Turabian StyleAhmad, Ejaz, Jamshed Iqbal, Muhammad Arshad Khan, Wu Liang, and Iljoong Youn. 2020. "Predictive Control Using Active Aerodynamic Surfaces to Improve Ride Quality of a Vehicle" Electronics 9, no. 9: 1463. https://doi.org/10.3390/electronics9091463
APA StyleAhmad, E., Iqbal, J., Arshad Khan, M., Liang, W., & Youn, I. (2020). Predictive Control Using Active Aerodynamic Surfaces to Improve Ride Quality of a Vehicle. Electronics, 9(9), 1463. https://doi.org/10.3390/electronics9091463