Movement Trajectory Recognition of Sign Language Based on Optimized Dynamic Time Warping



Abstract
:1. Introduction
2. Materials and Methods
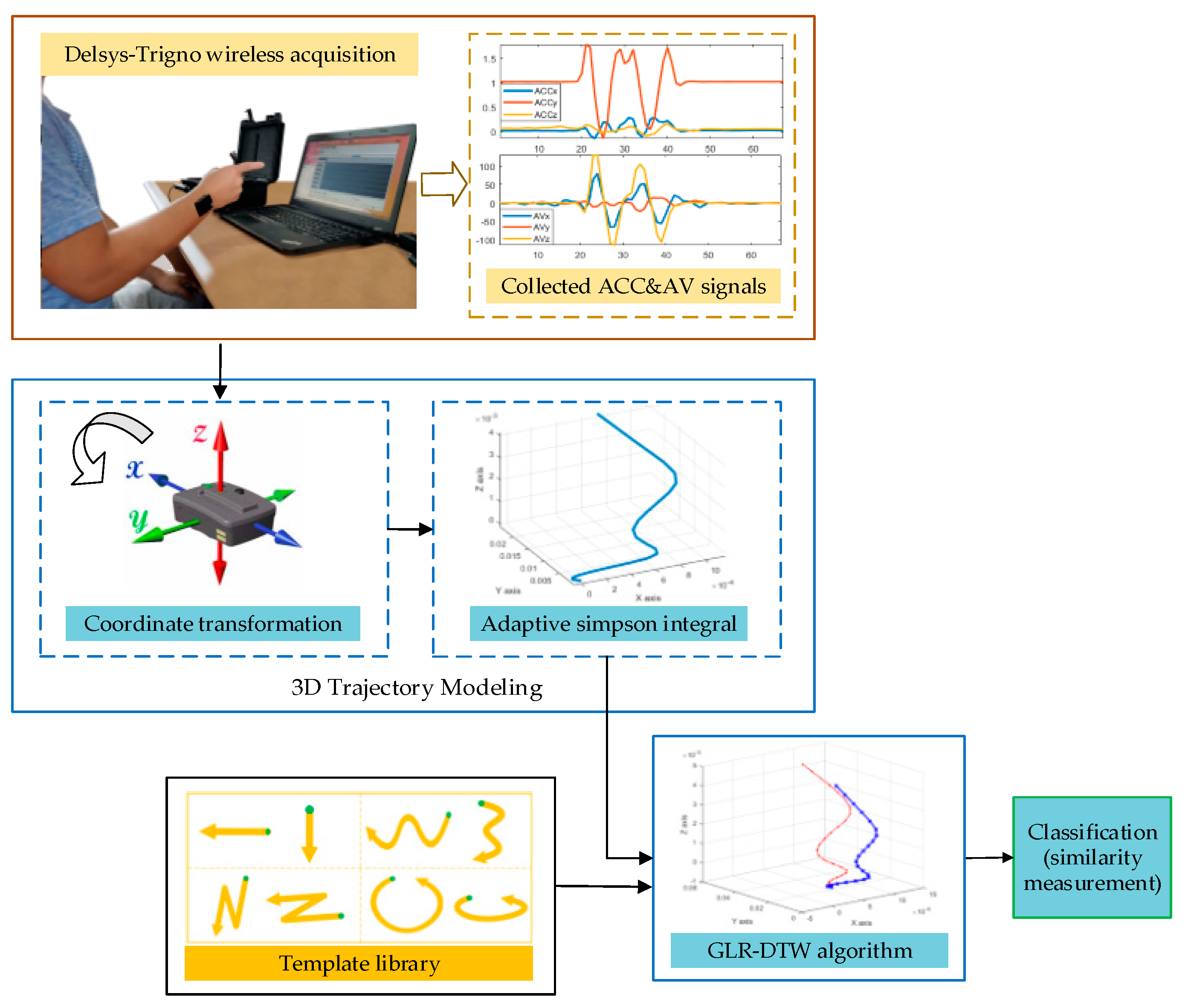
2.1. Overview
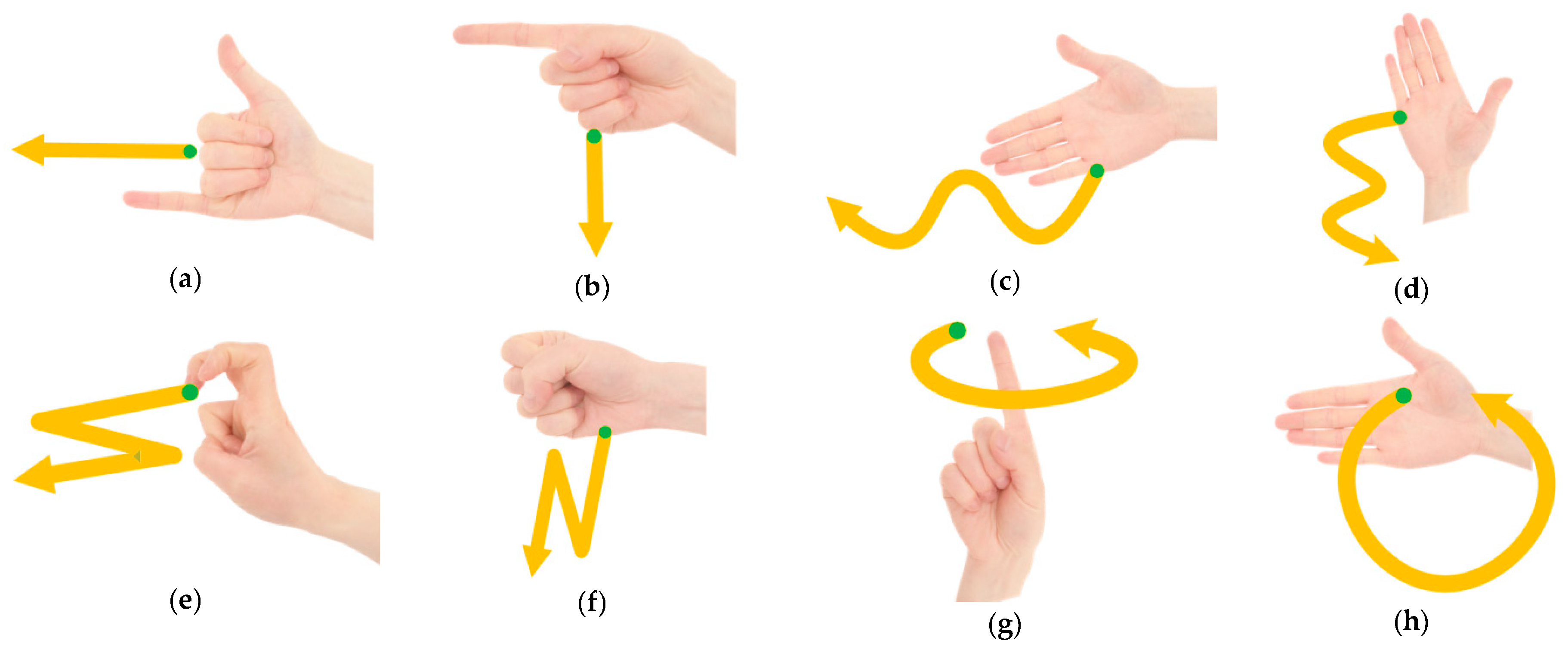
2.2. Trajectory Category
2.3. Data Acquisition
2.4. Modeling Method of Trajectory
2.5. GLR-DTW Algorithm
- (1)
- The value is 1 when the detection is a local maximum point.
- (2)
- The value is –1 when the detection is a local minimum point.
- (3)
- The value is 0 when the detection is a non-extreme point.
- (1)
- The value is 0 when or ; that is, the maximum point matches the maximum point, or the minimum point matches the minimum point.
- (2)
- The value is 1 when at least one of and is 0; that is, the non-extreme point matches the other points.
- (3)
- The value is 2 when or ; that is, the maximum point matches the minimum point.
3. Results and Discussion
3.1. Template Trajectory Library
3.2. Experiment of Movement Trajectory Modeling
3.3. Experiment of GLR-DIW
3.4. Similarity Measurement and Classification
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kumar, P.; Gauba, H.; Roy, P.P.; Dogr, D.P. A Multimodal Framework for Sensor based Sign Language Recognition. Neurocomputing 2017, 259, 21–38. [Google Scholar] [CrossRef]
- Bantupalli, K.; Xie, Y. American Sign Language Recognition using Deep Learning and Computer Vision. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018; pp. 4896–4899. [Google Scholar]
- Mittal, A.; Kumar, P.; Roy, P.P.; Balasubramanian, R.; Chaudhuri, B.B. A Modified LSTM Model for Continuous Sign Language Recognition Using Leap Motion. IEEE Sens. J. 2019, 19, 7056–7063. [Google Scholar] [CrossRef]
- Yang, P.; Chen, X.; Li, Y.; Wang, W.; Yang, J. A Sign Language Recognition Method Based on Multi-sensor Information. Space Med. Med. Eng. 2012, 25, 276–281. [Google Scholar]
- Yang, X.; Chen, X.; Cao, X.; Wei, S.; Zhang, X. Chinese Sign Language Recognition Based on an Optimized Tree-Structure Framework. IEEE J. Biomed. Health Inform. 2017, 21, 994–1004. [Google Scholar] [CrossRef]
- Naik, G.R.; Al-Timemy, A.H.; Nguyen, H.T. Transradial Amputee Gesture Classification Using an Optimal Number of sEMG Sensors: An Approach Using ICA Clustering. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 837–846. [Google Scholar] [CrossRef]
- Kosmidou, V.E.; Hadjileontiadis, L.J. Sign language recognition using intrinsic-mode sample entropy on sEMG and accelerometer data. IEEE Trans. Biomed. Eng. 2009, 56, 2879–2890. [Google Scholar] [CrossRef]
- Caputo, F.M.; Prebianca, P.; Carcangiu, A.; Spano, L.D.; Giachetti, A. Comparing 3D trajectories for simple mid-air gesture recognition. Comput. Graph. 2018, 73, 17–25. [Google Scholar] [CrossRef]
- Junhua, G.; Junsheng, X.; Hongpu, L. Application of an improved DTW algorithm in human behavior recognition. J. Hebei Univ. Technol. 2018, 47, 17–20. [Google Scholar]
- Yang, J.; Yuan, J.; Li, Y. Parsing 3D motion trajectory for gesture recognition. J. Vis. Commun. Image Represent. 2016, 38, 627–640. [Google Scholar] [CrossRef]
- Savur, C.; Sahin, F. American sign language recognition system by using surface EMG signal. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Budapest, Hungary, 9–12 October 2016; pp. 2872–2877. [Google Scholar]
- Wu, J.; Sun, L.; Jafari, R. A Wearable System for Recognizing American Sign Language in Real-Time Using IMU and Surface EMG Sensors. IEEE J. Biomed. Health Inform. 2016, 20, 1281–1290. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, X.; Li, Y.; Lantz, V.; Wang, K.; Yang, J. A Framework for Hand Gesture Recognition Based on Accelerometer and EMG Sensors. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2011, 41, 1064–1076. [Google Scholar] [CrossRef]
- Liu, J. Research and Design of Air Handwriting Trajectory Detection System. Master’s Thesis, Chengdu University of Technology, Chengdu, China, 28 May 2017. [Google Scholar]
- Yaokai, P. Dynamic Gesture Trajectory Recognition Based on HMM. Master’s Thesis, Beijing Jiaotong University, Beijing, China, June 2017. [Google Scholar]
- Chen, J. Research on Gesture Recognition and Human Activity Analysis Based on Surface Electromyography and Acceleration Signals. Ph.D. Thesis, University of Science and Technology of China, Hefei, China, 4 May 2013. [Google Scholar]
- Okawa, M. Template Matching Using Time-Series Averaging and DTW with Dependent Warping for Online Signature Verification. IEEE Access 2019, 7, 81010–81019. [Google Scholar] [CrossRef]
- Tormene, P.; Giorgino, T.; Quaglini, S.; Stefanelli, M. Matching incomplete time series with dynamic time warping: An algorithm and an application to post-stroke rehabilitation. Artif. Intell. Med. 2009, 45, 11–34. [Google Scholar] [CrossRef]
- Shen, J.; Huang, W.; Zhu, D.; Liang, J. A novel similarity measure model for multivariate time series based on LMNN and DTW. Neural Process. Lett. 2017, 45, 925–937. [Google Scholar] [CrossRef]
- Xu, L.; Chen, K.; Guo, Y. Sparse floating car data filling based on NB and DTW combined model. J. Zhongshan Univ. 2019, 58, 136–145. [Google Scholar]
- Lei, J.; Ma, W.J.; Chang, D.H. Gesture Acceleration Signals Recognition Based on Dynamic Time Warping. Chin. J. Sens. Actuators 2012, 25, 72–76. [Google Scholar]
- Jeong, Y.S.; Jeong, M.K.; Omitaomu, O.A. Weighted Dynamic Time Warping for Time Series Classification. Pattern Recognit. 2011, 44, 2231–2240. [Google Scholar] [CrossRef]
- Chou, Y.T.; Yang, J.F.K. Object recognition based on generalized linear regression classification in use of color information. In Proceedings of the 2014 IEEE Asia Pacific Conference on Circuits and Systems (APCCAS), Ishigaki, Japan, 17–20 November 2014. [Google Scholar]
- Chou, Y.T.; Yang, J.F. Identity recognition based on generalised linear regression classification for multi-component images. IET Comput. Vis. 2016, 10, 18–27. [Google Scholar] [CrossRef]
- Krueger, D.C.; Montgomery, D.C.; Mastrangelo, C.M. Application of Generalized Linear Models to Predict Semiconductor Yield Using Defect Metrology Data. IEEE Trans. Semicond. Manuf. 2011, 24, 44–58. [Google Scholar] [CrossRef]
- China Association for the Deaf. Chinese Sign Language, 2nd ed.; Huaxia Press: Beijing, China, 2003. [Google Scholar]
- Ren, M. An Acceleration-Sensor-Based Trajectory Detection System of a Moving Object. Master’s Thesis, Nanjing University of Posts and Telecommunications, Nanjing, China, June 2013. [Google Scholar]
- Zhou, Z.; Mao, M. Dynamic time warping gesture authentication algorithm based on improved Mahalanobis distance. J. Comput. Appl. 2015, 35, 1467–1470. [Google Scholar]
- He, S.Q.; Liang, X.Y.; Yan, C.L.; Guo, B.; Liu, H. New method for gait recognition on combinability of multi-scale entropy and dynamic time warping algorithm. J. Chongqing Univ. 2018, 41, 84–91. [Google Scholar]
- Yangyang, X.; Yuansheng, L.; Guozhong, S. An Improvement Algorithm for Improving the Computing Efficiency of DTW Algorithm. Comput. Digit. Eng. 2019, 47, 530–534. [Google Scholar]
- Qi, M.Y.; Li, Y.X.; Ta, H. A similarity metric algorithm for multivariate time series based on information entropy and DTW. J. Zhongshan Univ. 2019, 58, 1–8. [Google Scholar]
- Ten Holt, G.A.; Reinders, M.J.; Hendriks, E.A. Multi-dimensional dynamic time warping for gesture recognition. In Proceedings of the Thirteenth Annual Conference of the Advanced School for Computing and Imaging (ASCI 2007), Heijen, The Netherlands, 13–15 June 2007; pp. 1–8. [Google Scholar]
- Rrdlh, G.C.; Kalogirou, S.A.; Christodoulides, P. Wind farm monitoring using Mahalanobis distance and fuzzy clustering. Renew. Energy 2018, 123, 526–540. [Google Scholar]
- Yan, W.; Xianghui, Q.; Yaxi, D. Image segmentation of FCM algorithm based on kernel function and Markov distance. Appl. Res. Comput. 2018, 37, 2. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Name of Trajectory | Abbreviation | Chinese SL Vocabulary 1 | Example |
|---|---|---|---|---|
| 1 | Horizontal straight-line movement | HLM | Da 2; Chang 3 | Figure 2a |
| 2 | Vertical straight-line movement | VLM | Wen 4; Man 5 | Figure 2b |
| 3 | Horizontal wave-shape movement | HWM | Jiang 6; Ge 7 | Figure 2c |
| 4 | Vertical wave-shape movement | VWM | Baxi 8; Yidali 9 | Figure 2d |
| 5 | Horizontal shaking | HS | Renshi 10; Jianmian 11 | Figure 2e |
| 6 | Vertical shaking | VS | Jintian 12; Gaoxing 13 | Figure 2f |
| 7 | Horizontal circular arc movement | HCM | Yun 14; Renmin 15 | Figure 2g |
| 8 | Vertical circular arc movement | VCM | Yiqie 16; Dou 17 | Figure 2h |
| A’s HLM | A’s HLM | A’s HWM | A’s VWM | A’s HS | A’s VS | A’s HCM | A’s VCM | |
|---|---|---|---|---|---|---|---|---|
| Template HLM | 12.1902 | 3434.37 | 1554.33 | 1773.51 | 2494.58 | 2534.45 | 5705.32 | 5680.11 |
| Template VLM | 3197.84 | 16.9422 | 1802.92 | 1443.56 | 2534.47 | 2434.90 | 5669.26 | 5757.40 |
| Template HVM | 1500.87 | 1834.00 | 38.0277 | 4234.38 | 1034.20 | 1234.36 | 5098.20 | 5811.52 |
| Template VWM | 1744.70 | 1434.90 | 4434.78 | 41.3289 | 1206.50 | 982.11 | 5985.74 | 4919.94 |
| Template HS | 2344.23 | 2601.31 | 1022.39 | 1324.58 | 26.3975 | 3344.39 | 4080.32 | 3891.13 |
| Template VS | 2543.78 | 2450.85 | 1234.76 | 1014.70 | 3534.43 | 29.0043 | 4191.20 | 4000.12 |
| Template HCM | 5971.25 | 5008.24 | 5191.70 | 5888.94 | 4091.33 | 4229.32 | 40.1974 | 2998.78 |
| Template VCM | 5592.40 | 5729.09 | 5891.15 | 5191.53 | 3990.82 | 4077.04 | 2833.78 | 45.2332 |
| - | Number of Samples | HMM [32] | DTW | GLR-DTW |
|---|---|---|---|---|
| HLM trajectory | 20 | 19 | 19 | 20 |
| VLM trajectory | 20 | 18 | 19 | 19 |
| HWM trajectory | 20 | 17 | 18 | 18 |
| VWM trajectory | 20 | 18 | 15 | 17 |
| HS trajectory | 20 | 17 | 16 | 17 |
| VS trajectory | 20 | 16 | 18 | 18 |
| HCM trajectory | 20 | 15 | 13 | 14 |
| VCM trajectory | 20 | 14 | 15 | 15 |
| Average accuracy | - | 83.75% | 83.13% | 86.25% |
| HMM [32] | DTW | GLR-DTW | |
|---|---|---|---|
| HLM trajectory | 207.3 | 104.7 | 123.0 |
| VLM trajectory | 198.4 | 102.1 | 122.7 |
| HWM trajectory | 221.4 | 131.4 | 148.1 |
| VWM trajectory | 208.9 | 123.2 | 153.2 |
| HS trajectory | 204.6 | 120.8 | 139.3 |
| VS trajectory | 193.0 | 117.0 | 134.8 |
| HCM trajectory | 211.1 | 131.2 | 154.4 |
| VCM trajectory | 216.8 | 138.5 | 150.6 |
| Average time | 207.7 | 121.1 | 140.8 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Luo, Z.; Xi, X. Movement Trajectory Recognition of Sign Language Based on Optimized Dynamic Time Warping. Electronics 2020, 9, 1400. https://doi.org/10.3390/electronics9091400
Li W, Luo Z, Xi X. Movement Trajectory Recognition of Sign Language Based on Optimized Dynamic Time Warping. Electronics. 2020; 9(9):1400. https://doi.org/10.3390/electronics9091400
Chicago/Turabian StyleLi, Wenguo, Zhizeng Luo, and Xugang Xi. 2020. "Movement Trajectory Recognition of Sign Language Based on Optimized Dynamic Time Warping" Electronics 9, no. 9: 1400. https://doi.org/10.3390/electronics9091400
APA StyleLi, W., Luo, Z., & Xi, X. (2020). Movement Trajectory Recognition of Sign Language Based on Optimized Dynamic Time Warping. Electronics, 9(9), 1400. https://doi.org/10.3390/electronics9091400