Automated Data Acquisition System Using a Neural Network for Prediction Response in a Mode-Locked Fiber Laser


 , ,
, ,  and
and 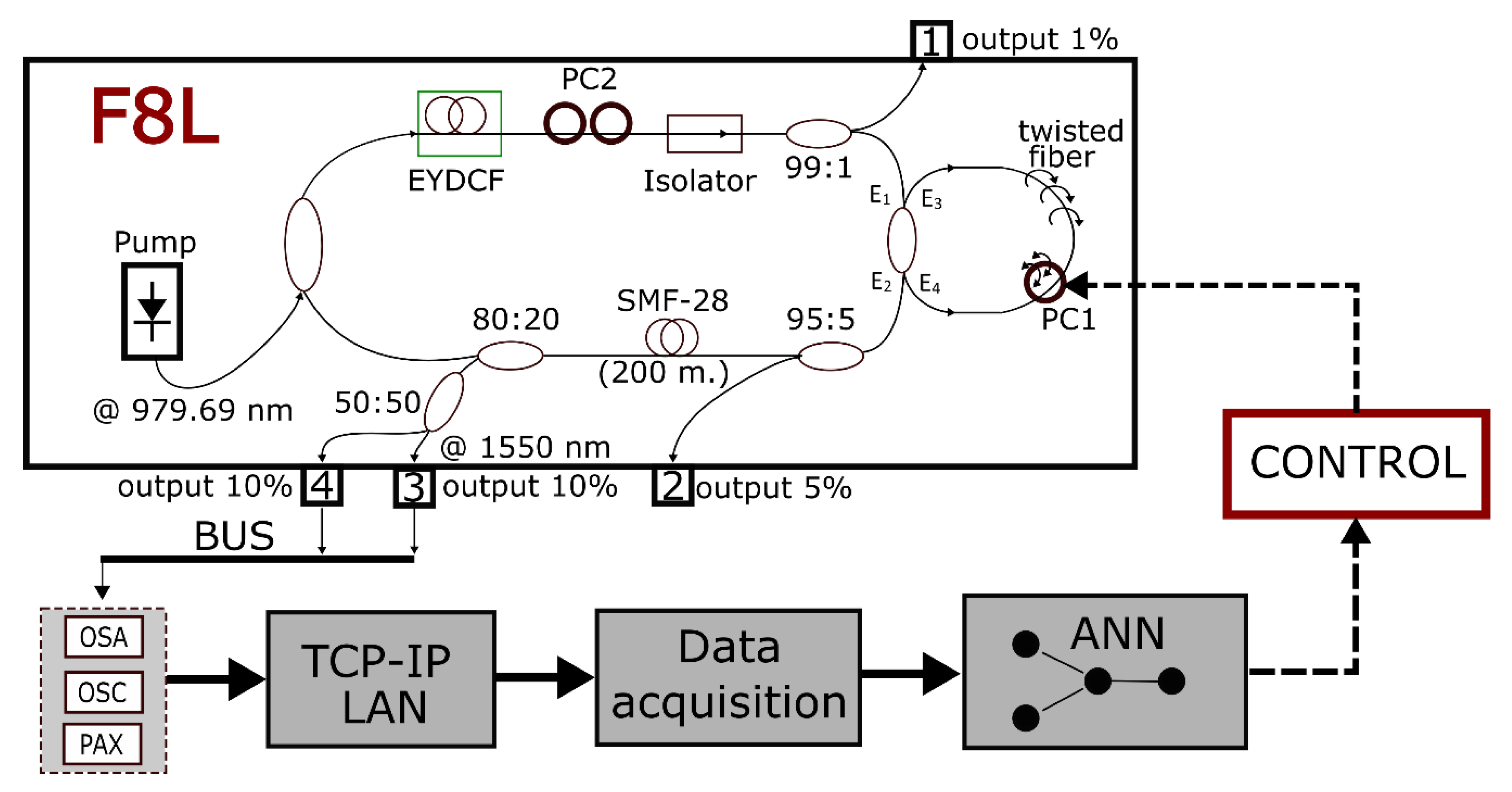{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
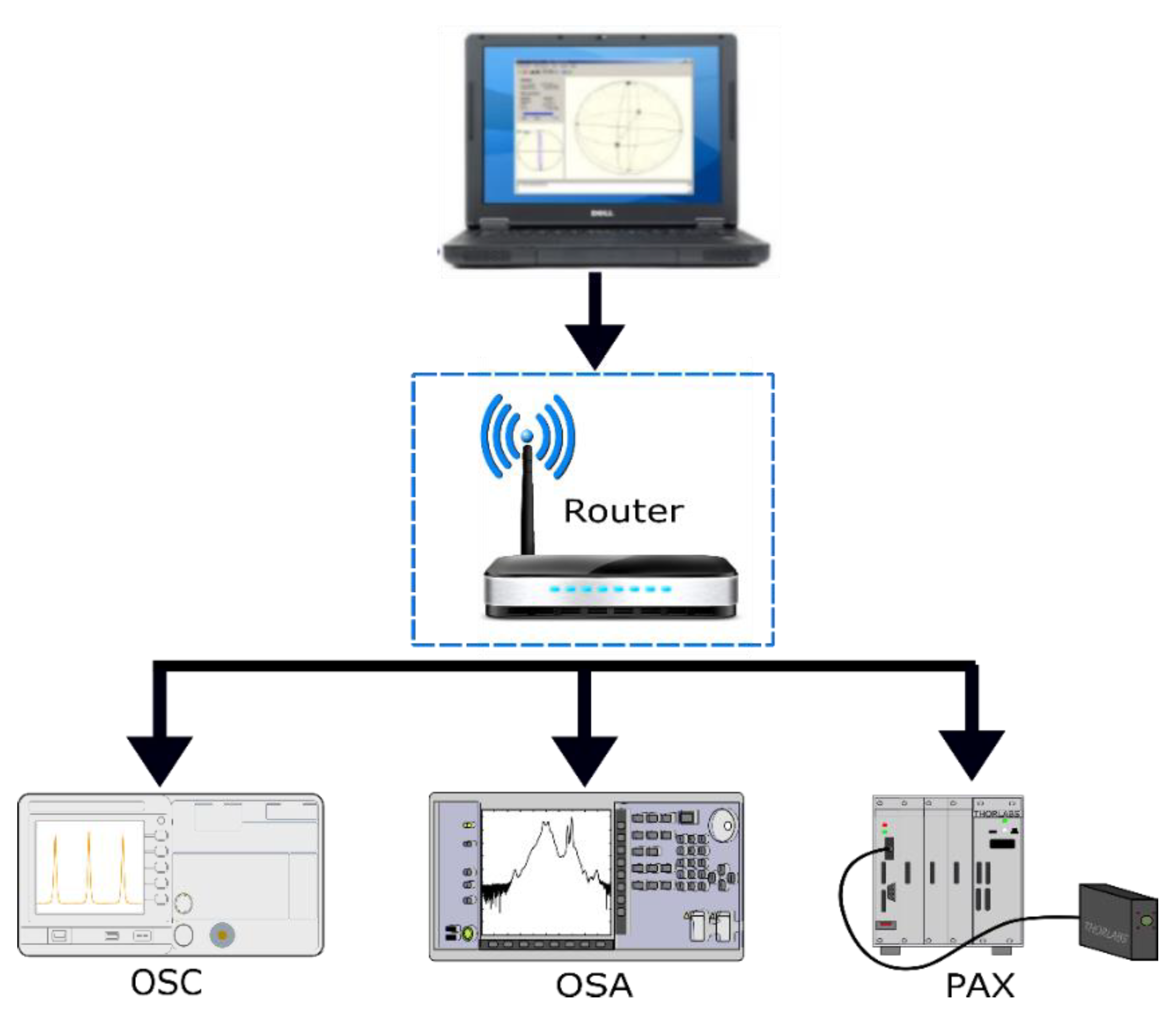
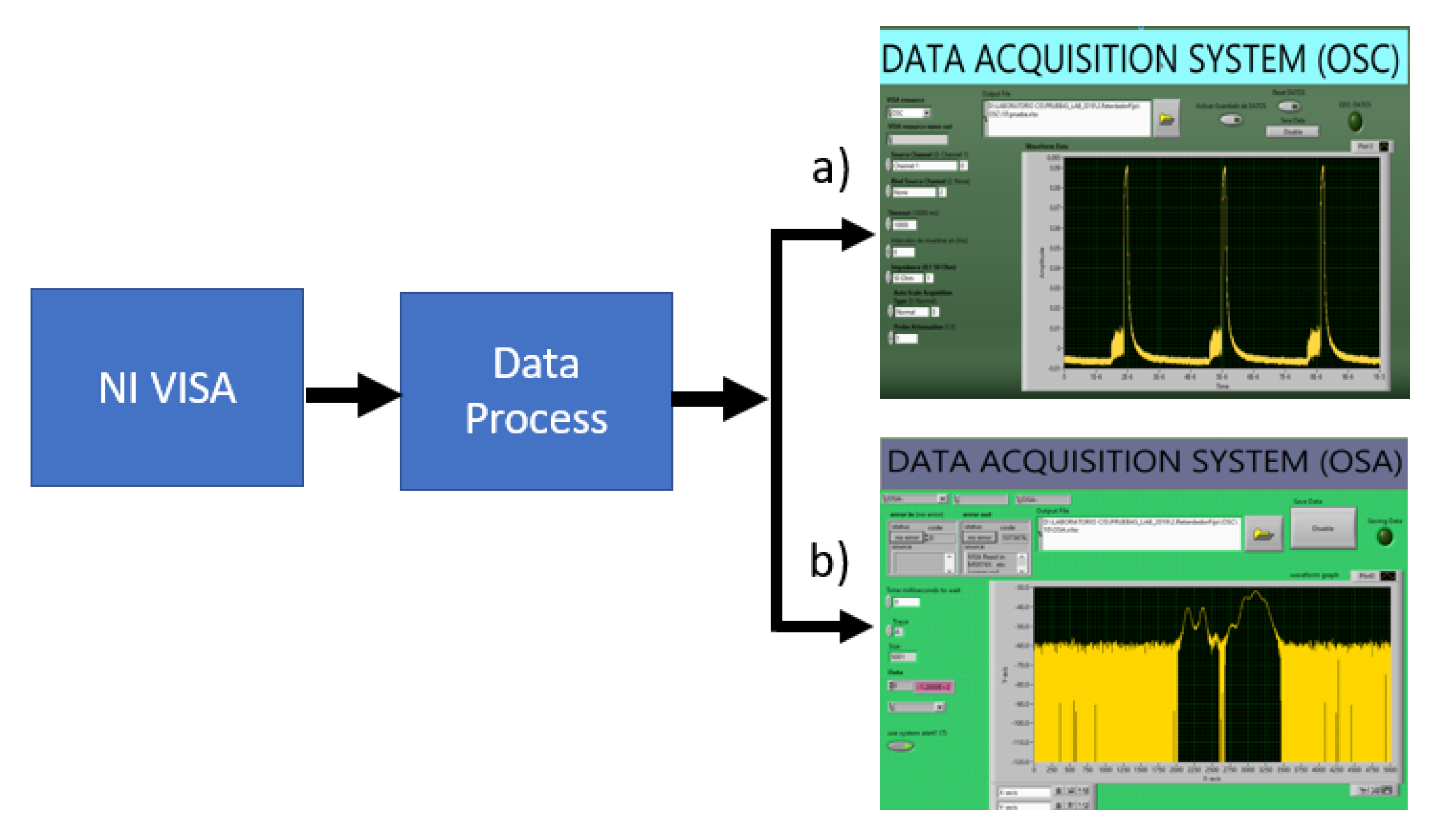
2.1. Laser Setup and Data Handling
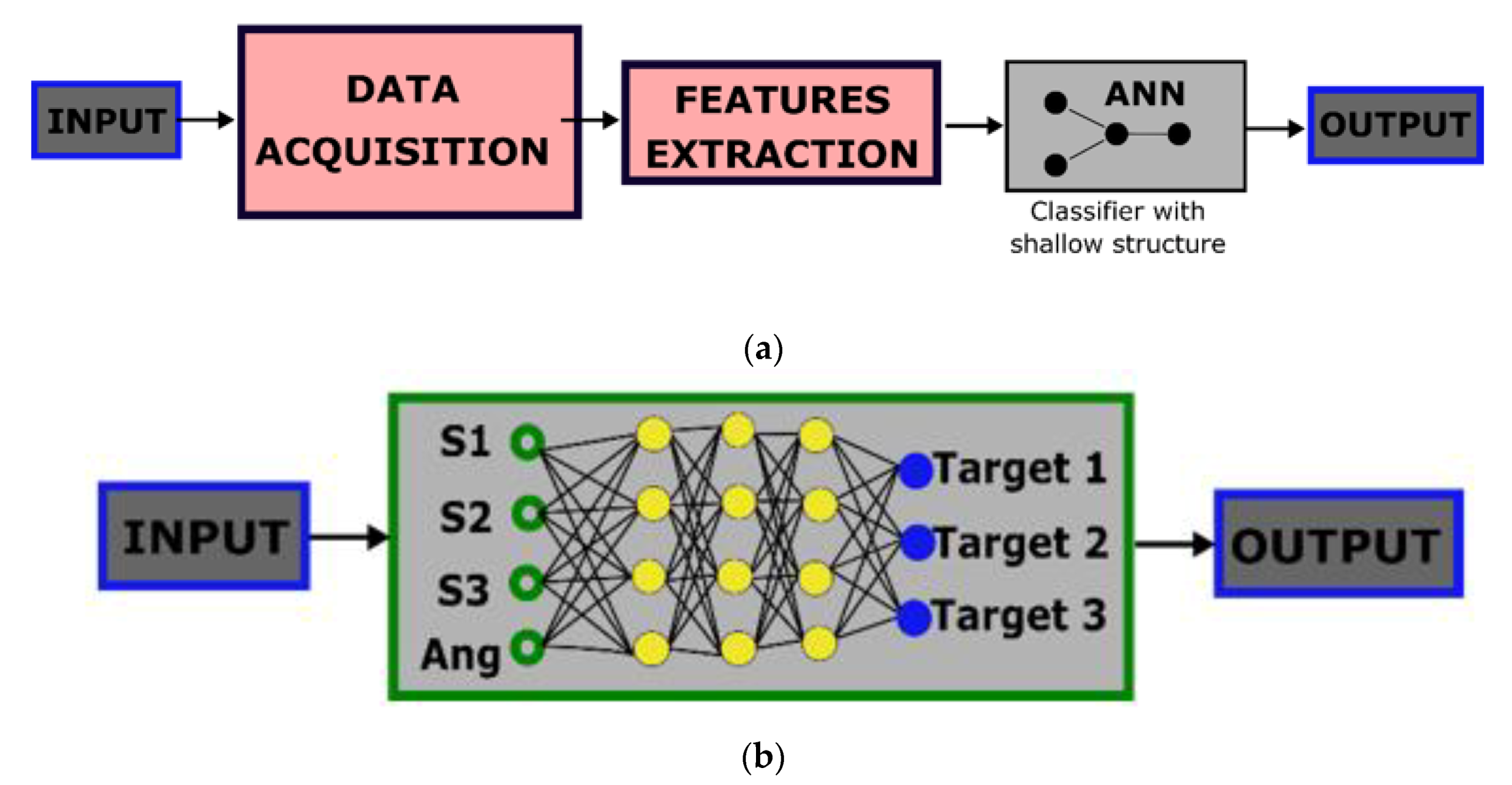
2.2. Artificial Neural Networks (ANN)
3. Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- De Georgia, M.A.; Kaffashi, F.; Jacono, F.J.; Loparo, K.A. Information technology in critical care: Review of monitoring and data acquisition systems for patient care and research. Sci. World J. 2015, 2015, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Costas-Perez, L.; Lago, D.; Farina, J.; Rodriguez-Andina, J.J. Optimization of an industrial sensor and data acquisition laboratory through time sharing and remote access. IEEE Trans. Ind. Electron. 2008, 55, 2397–2404. [Google Scholar] [CrossRef]
- Schumacher, P.M. Data Acquisition System for Large Format Video Display. U.S. Patents 4485409, 27 November 1984. [Google Scholar]
- Michelon, G.K.; Bazzi, C.L.; Upadhyaya, S.; de Souza, E.G.; Magalhães, P.S.G.; Borges, L.F.; Schenatto, K.; Sobjak, R.; Gavioli, A.; Betzek, N.M. Software AgDataBox-Map to precision agriculture management. SoftwareX 2019, 10, 100320. [Google Scholar] [CrossRef]
- Patena, G.; Ingram, K.T. Digital acquisition and measurement of peanut root minirhizotron images. Agron. J. 2000, 92, 541–544. [Google Scholar] [CrossRef]
- Ameur, S.; Laghrouche, M.; Adane, A. Monitoring a greenhouse using a microcontroller-based meteorological data-acquisition system. Renew. Energy 2001, 24, 19–30. [Google Scholar] [CrossRef]
- Kumar, N.P.A.; Jagadeesh Chandra, A.P. Development of Remote Instrumentation and Control for Laboratory Experiments using Handheld Devices. Int. J. Online Biomed. Eng. iJOE 2019, 15, 31–43. [Google Scholar]
- Sanders, J.W.; Fletcher, J.R.; Frank, S.J.; Liu, H.-L.; Johnson, J.M.; Zhou, Z.; Chen, H.S.-M.; Venkatesan, A.M.; Kudchadker, R.J.; Pagel, M.D.; et al. Deep learning application engine (DLAE): Development and integration of deep learning algorithms in medical imaging. SoftwareX 2019, 10, 100347. [Google Scholar] [CrossRef]
- Binder, J.M.; Stark, A.; Tomek, N.; Scheuer, J.; Frank, F.; Jahnke, K.D.; Müller, C.; Schmitt, S.; Metsch, M.H.; Unden, T.; et al. Qudi: A modular python suite for experiment control and data processing. SoftwareX 2017, 6, 85–90. [Google Scholar] [CrossRef]
- Nguyen, D.T.; Kaneshiro, B. AudExpCreator: A GUI-based Matlab tool for designing and creating auditory experiments with the Psychophysics Toolbox. SoftwareX 2018, 7, 328–334. [Google Scholar] [CrossRef]
- Tian, H.; Wang, T.; Liu, Y.; Qiao, X.; Li, Y. Computer vision technology in agricultural automation—A review. Inf. Process. Agric. 2019. [Google Scholar] [CrossRef]
- Suk, H.-J.; Boyden, E.S.; van Welie, I. Advances in the automation of whole-cell patch clamp technology. J. Neurosci. Methods 2019, 326, 108357. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Song, G.; Zhang, Y. Virtual and remote laboratory development: A review. In Earth and Space 2010: Engineering, Science, Construction, and Operations in Challenging Environments; ASCE: Reston, VA, USA, 2010. [Google Scholar] [CrossRef]
- Elliott, C.; Vijayakumar, V.; Zink, W.; Hansen, R. National Instruments LabVIEW: A Programming Environment for Laboratory Automation and Measurement. JALA J. Assoc. Lab. Autom. 2007, 12, 17–24. [Google Scholar] [CrossRef]
- Liu, L.G.; Li, J.H.; Deng, L.H. Design of data acquisition system based on labVIEW. Adv. Mater. Res. 2012, 569, 808–813. [Google Scholar] [CrossRef]
- Liao, H.; Qiu, Z.; Feng, G. The design of LDF data acquisition system based on LabVIEW. Procedia Environ. Sci. 2011, 10, 1188–1192. [Google Scholar] [CrossRef]
- Hunter, P. The advent of AI and deep learning in diagnostics and imaging. EMBO Rep. 2019, 20, e48559. [Google Scholar] [CrossRef]
- Chakravarty, A.; Mentink, J.; Davies, C.; Yamada, K.; Kimel, A.; Rasing, T. Supervised learning of an opto-magnetic neural network with ultrashort laser pulses. Appl. Phys. Lett. 2019, 114, 192407. [Google Scholar] [CrossRef]
- Boutaba, R.; Salahuddin, M.A.; Limam, N.; Ayoubi, S.; Shahriar, N.; Estrada-Solano, F.; Caicedo, O.M. A comprehensive survey on machine learning for networking: Evolution, applications and research opportunities. J. Internet Serv. Appl. 2018, 9, 16. [Google Scholar] [CrossRef]
- Ghaheri, A.; Shoar, S.; Naderan, M.; Hoseini, S.S. The applications of genetic algorithms in medicine. Oman Med. J. 2015, 30, 406. [Google Scholar] [CrossRef] [PubMed]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer Science & Business Media: London, UK, 2010. [Google Scholar]
- Koljonen, J.; Nordling, T.E.M.; Alander, J.T. A review of genetic algorithms in near infrared spectroscopy and chemometrics: Past and future. J. Near Infrared Spectrosc. 2008, 16, 189–197. [Google Scholar] [CrossRef]
- Woodward, R.I.; Kelleher, E.J.R. Towards ‘smart lasers’: Self-optimisation of an ultrafast pulse source using a genetic algorithm. Sci. Rep. 2016, 6, 37616. [Google Scholar] [CrossRef]
- Andral, U.; Fodil, R.S.; Amrani, F.; Billard, F.; Hertz, E.; Grelu, P. Fiber laser mode locked through an evolutionary algorithm. Optica 2015, 2, 275–278. [Google Scholar] [CrossRef]
- Kokhanovskiy, A.; Bednyakova, A.; Kuprikov, E.; Ivanenko, A.; Dyatlov, M.; Lotkov, D.; Kobtsev, S.; Turitsyn, S. Machine learning-based pulse characterization in figure-eight mode-locked lasers. Opt. Lett. 2019, 44, 3410–3413. [Google Scholar] [CrossRef]
- Hoffmann, A.; Zuerch, M.; Spielmann, C. Extremely nonlinear optics using shaped pulses spectrally broadened in an argon- or sulfur hexafluoride-filled hollow-core fiber. Appl. Sci. 2015, 5, 1310–1322. [Google Scholar] [CrossRef]
- Lu, H.; Xu, H.; Zhao, J.; Hou, D. A deep ultraviolet mode-locked laser based on a neural network. Sci. Rep. 2020, 10, 116. [Google Scholar] [CrossRef] [PubMed]
- Zimmermann, J.; Langbehn, B.; Cucini, R.; Di Fraia, M.; Finetti, P.; LaForge, A.C.; Nishiyama, T.; Ovcharenko, Y.; Piseri, P.; Plekan, O.; et al. Deep neural networks for classifying complex features in diffraction images. Phys. Rev. E 2019, 99, 063309. [Google Scholar] [CrossRef] [PubMed]
- Arteaga-Sierra, F.; Milián, C.; Torres-Gómez, I.; Torres-Cisneros, M.; Plascencia-Mora, H.; Moltó, G.; Ferrando, A. Optimization for maximum Raman frequency conversion in supercontinuum sources using genetic algorithms. Revista Mexicana de Física 2017, 63, 111–116. [Google Scholar]
- Arteaga-Sierra, F.; Milian, C.; Torres, I.; Torres-Cisneros, M.; Moltó, G.; Ferrando, A. Supercontinuum optimization for dual-soliton based light sources using genetic algorithms in a Grid platform. Opt. Express 2014, 22, 23686. [Google Scholar] [CrossRef]
- Ibarra-Escamilla, B.; Kuzin, E.; Duran-Sanchez, M.; Pottiez, O.; Haus, J. Symmetric nonlinear optical loop mirror used as saturable absorber in mode-locked fiber laser. In Proceedings of the Latin America Optics and Photonics Conference, Cancun, Mexico, 16–21 November 2014; p. LTu1A-3. [Google Scholar]
- Avazpour, M.; Beltrán-Pérez, G.; Rodríguez-Morales, L.A.; Armas-Rivera, I.; Ibarra-Escamilla, B.; Muñoz-Aguirre, S.; Castillo-Mixcóatl, J.; Pottiez, O.; Kuzin, E.A. The use of polarization-imbalanced NOLM to improve the quality of the spectrum compression. Opt. Laser Technol. 2019, 120, 105692. [Google Scholar] [CrossRef]
- Kashi, A.S.; Zhuge, Q.; Cartledge, J.C.; Etemad, S.A.; Borowiec, A.; Charlton, D.W.; Laperle, C.; Sullivan, M.O. Nonlinear signal-to-noise ratio estimation in coherent optical fiber transmission systems using artificial neural networks. J. Lightw. Technol. 2018, 36, 5424–5431. [Google Scholar] [CrossRef]
- Badhwar, P.; Kumar, A.; Yadav, A.; Kumar, P.; Siwach, R.; Chhabra, D.; Dubey, K.K. Improved pullulan production and process optimization using novel GA–ANN and GA–ANFIS hybrid statistical tools. Biomolecules 2020, 10, 124. [Google Scholar] [CrossRef]
- Nasser, I.M.; Abu-Naser, S.S. Predicting tumor category using artificial neural networks. Int. J. Acad. Health Med. Res. 2019, 3, 1–7. [Google Scholar]
- Izgi, E.; Öztopal, A.; Yerli, B.; Kaymak, M.K.; Şahin, A.D. Short-mid-term solar power prediction by using artificial neural networks. Sol. Energy 2012, 86, 725–733. [Google Scholar] [CrossRef]
- Olivier, M.; Gagnon, M.-D.; Piché, M. Automated mode locking in nonlinear polarization rotation fiber lasers by detection of a discontinuous jump in the polarization state. Opt. Express 2015, 23, 6738–6746. [Google Scholar] [CrossRef]
- Herrmann, I.; Berenstein, M.; Paz-Kagan, T.; Sade, A.; Karnieli, A. Spectral assessment of two-spotted spider mite damage levels in the leaves of greenhouse-grown pepper and bean. Biosyst. Eng. 2017, 157, 72–85. [Google Scholar] [CrossRef]
- Barrientos, F.; Ríos, S.A. Aplicación de minería de datos para predecir fuga de clientes en la industria de las telecomunicaciones. Revista Ingeniería de Sistemas 2013, 27, 73–107. [Google Scholar]
- Rumpf, T.; Mahlein, A.-K.; Steiner, U.; Oerke, E.-C.; Dehne, H.-W.; Plümer, L. Early detection and classification of plant diseases with support vector machines based on hyperspectral reflectance. Comput. Electron. Agric. 2010, 74, 91–99. [Google Scholar] [CrossRef]
- Schaefer, B.; Collett, E.; Smyth, R.; Barrett, D.; Fraher, B. Measuring the Stokes polarization parameters. Am. J. Phys. 2007, 75, 163–168. [Google Scholar] [CrossRef]
- Hernandez-Garcia, J.C.; Estudillo-Ayala, J.M.; Pottiez, O.; Filoteo-Razo, J.D.; Lauterio-Cruz, J.P.; Sierra-Hernandez, J.M.; Rojas-Laguna, R. Flat supercontinuum generation by a F8L in high-energy harmonic noise-like pulsing regime. Laser Phys. Lett. 2016, 13, 125104. [Google Scholar] [CrossRef]
- Ardalan, S.H.; Van Den Bout, D.E. Remote Access to Electronic Meters Using a TCP/IP Protocol Suite. U.S. Patent 0218616 A1, 4 November 2004. [Google Scholar]
- Vizcaíno, J.R.L.; Sebastiá, J.P. LabVIEW: Entorno Gráfico de Programación; Marcombo: Barcelona, Spain, 2011. [Google Scholar]
- Agrawal, G.P. Nonlinear Fiber Optics, 5th ed.; Academic Press: NewYork, NY, USA, 2013; p. 648. [Google Scholar]
- Ibrahimy, M.I.; Ahsan, R.; Khalifa, O.O. Design and optimization of Levenberg-Marquardt based neural network classifier for EMG signals to identify hand motions. Meas. Sci. Rev. 2013, 13, 142–151. [Google Scholar] [CrossRef]
- Tabet, M.F.; McGahan, W.A. Use of artificial neural networks to predict thickness and optical constants of thin films from reflectance data. Thin Solid Films 2000, 370, 122–127. [Google Scholar] [CrossRef]
- Liehr, S.; Jäger, L.A.; Karapanagiotis, C.; Münzenberger, S.; Kowarik, S. Real-time dynamic strain sensing in optical fibers using artificial neural networks. Opt. Express 2019, 27, 7405–7425. [Google Scholar] [CrossRef] [PubMed]
- Mohamad, N.; Zaini, F.; Johari, A.; Yassin, I.; Zabidi, A. Comparison between Levenberg-Marquardt and Scaled Conjugate Gradient training algorithms for Breast Cancer Diagnosis using MLP. In Proceedings of the 6th International Colloquium on Signal Processing & its Applications, Malacca City, Malaysia, 21–23 May 2010; pp. 1–7. [Google Scholar]
- Du, Y.-C.; Stephanus, A. Levenberg-Marquardt neural network algorithm for degree of arteriovenous fistula stenosis classification using a dual optical photoplethysmography sensor. Sensors 2018, 18, 2322. [Google Scholar] [CrossRef] [PubMed]
- Mohammed, R.K. Comparing various channel estimation techniques for OFDM systems using MATLAB. Int. J. Wirel. Mob. Netw. IJWMN 2019, 11. [Google Scholar] [CrossRef]








© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martinez-Angulo, J.R.; Perez-Careta, E.; Hernandez-Garcia, J.C.; Marquez-Figueroa, S.; Barron Zambrano, J.H.; Jauregui-Vazquez, D.; Filoteo-Razo, J.D.; Lauterio-Cruz, J.P.; Pottiez, O.; Estudillo-Ayala, J.M.; et al. Automated Data Acquisition System Using a Neural Network for Prediction Response in a Mode-Locked Fiber Laser. Electronics 2020, 9, 1181. https://doi.org/10.3390/electronics9081181
Martinez-Angulo JR, Perez-Careta E, Hernandez-Garcia JC, Marquez-Figueroa S, Barron Zambrano JH, Jauregui-Vazquez D, Filoteo-Razo JD, Lauterio-Cruz JP, Pottiez O, Estudillo-Ayala JM, et al. Automated Data Acquisition System Using a Neural Network for Prediction Response in a Mode-Locked Fiber Laser. Electronics. 2020; 9(8):1181. https://doi.org/10.3390/electronics9081181
Chicago/Turabian StyleMartinez-Angulo, Jose Ramon, Eduardo Perez-Careta, Juan Carlos Hernandez-Garcia, Sandra Marquez-Figueroa, Jose Hugo Barron Zambrano, Daniel Jauregui-Vazquez, Jose David Filoteo-Razo, Jesus Pablo Lauterio-Cruz, Olivier Pottiez, Julian Moises Estudillo-Ayala, and et al. 2020. "Automated Data Acquisition System Using a Neural Network for Prediction Response in a Mode-Locked Fiber Laser" Electronics 9, no. 8: 1181. https://doi.org/10.3390/electronics9081181
APA StyleMartinez-Angulo, J. R., Perez-Careta, E., Hernandez-Garcia, J. C., Marquez-Figueroa, S., Barron Zambrano, J. H., Jauregui-Vazquez, D., Filoteo-Razo, J. D., Lauterio-Cruz, J. P., Pottiez, O., Estudillo-Ayala, J. M., & Rojas-Laguna, R. (2020). Automated Data Acquisition System Using a Neural Network for Prediction Response in a Mode-Locked Fiber Laser. Electronics, 9(8), 1181. https://doi.org/10.3390/electronics9081181