Abstract
In this paper, we propose a method of practical realization and an actual, physical hardware implementation of a fractional variable-type and order difference operator that switches between two (i.e., - and -type) variable-order definitions. After the theoretical model of such a switch, we report the experimental validation on an analog model to prove its adequacy. The tests prove with great certainty that the proposed model and the realization behave correctly. They also let the authors assume that the proposed method is the only one suitable for this case, based on the counterexamples presented.
1. Introduction
Fractional calculus is a generalization of traditional differential calculus for cases in which orders of the differentiation and integration are real or even complex numbers. The theoretical background for this calculus can be found in [1,2,3,4].
Fractional calculus was found to be extremely useful when modeling the dynamics of diffusive systems. Especially interesting cases are the anomalous diffusion ones and are described by power law , where stands for mean squared displacement, is the diffusion coefficient, and t is the elapsed time. Whenever the process is a normal diffusion, if or , we get a sub or super-diffusion process. The heat transfer is a typical diffusion problem and its modeling based on fractional calculus for a solid beam was presented in [5]. Other authors dealt with the idea of the heat diffusion process in non-homogeneous fractal media (e.g., [6,7]) or even a diffusion of information in social networks [8].
Other good examples of successful modeling are ultracapacitors—electrical devices with outstanding capacity in relation to their dimensions and that are widely used as storage devices in power-electronics. The energy storage process in these devices is based on diffusion of ions; that is why fractional-order models are more accurate than the integer-order ones [9]. As it was presented in [10], both in low and high frequencies, ultracapacitors can be modeled by fractional-order integrators but with different values of the order; i.e., for high frequencies the order is close to 0.5 and for low frequencies it is close to 1. More results on modeling ultracapacitors can be found in [11]. Using fractional-order models on ultracapacitors allows us to examine some interesting phenomena, such as different values of resonance frequency (equality of imaginary parts of impedance) and maximum value of current, as was presented in [12]. Dependency between fractional-order of the model and operating temperature was presented in [13] and the dependency between charging and discharging processes was presented in [14]. Aforementioned cases motivate the usage of variable-order calculus that would describe such phenomena of changing the properties of the model in time. In [15] a variable fractional order operator was used to model nano-silver paste by characterizing both tensile and shear behaviors and demonstrating the evolution of mechanical properties. In [16] a fractional variable-order equivalent circuit was used to model Li-ion batteries from an electric vehicle. The paper [17] presents the determination of the relationship between the fractional order and electrode aging, and uses the variable fractional order as an indicator for electrode aging.
The variable-order case is more complicated and less intuitive than the integer-order one. There exist at least six different main types of variable-order derivative definition [18,19,20], but only four of them have corresponding switching schemes, which are input-reductive, input-additive, output-reductive, and output-additive ([21,22,23]). The corresponding switching schemes allow one to better understand the behavior of order the changing process for each of the definitions. It also allows us to build analog models that can be useful for validation of simulation results due to a limited number of analytical solutions.
Non-intuitive behavior of variable-order operators is that the order composition generally does not occur; e.g., the composition of two variable-order operators with additive inverse orders does not result with an order 0, and in the consequence, is an original function. However, the iterative and recursive variable-order definitions are connected together by duality property. As it was presented in [24], only for the compositions of particular type definitions and opposite signs of orders, it is possible to obtain the expected result—an original function. This occurs when two corresponding iterative and recursive (dual) definitions are taken into consideration.
It is also possible to define a case where the way that the order changes in time (type of variable-order definition) also changes in time. In such a case we have to consider the fractional variable-type and order differences that can also have different manners of changing (different definitions). Preliminary results, introducing the so-called iterative -, -, and recursive and -type operators, have been considered in [25,26,27]. Corresponding switching schemes, based on the duality property, were given also and proven. In [28] analog realization for iterative -type definition has been presented and validated. However, in order to obtain analog realization, a parallel switching scheme had to be introduced and investigated, because a typical switching scheme in the form of an integrator chain was unable to realize in practice. In this paper, a practical realization of a particular case of -type definition is proposed and validated.
The paper is organized as follows. In Section 2, both fractional variable-order and fractional variable-type difference definitions are recalled. Section 3 presents the -type variable-order difference definition, and in Section 3.1 the main results—the practical realization method for switching between - and -type definitions is proposed. In Section 4, experimental validation of proposed scheme is presented. Finally, conclusions of the results and possibilities for future work are given. Appendix A contains short discussion about extension of this method for other order changing strategies.
2. Fractional Constant-Type Variable-Order Differences
In this section, we present some already known fractional constant and variable-order difference definitions of constant-type, which will be used for further considerations.
where
and
The Grünwald–Letnikov difference presented in iterative form (1) can be rewritten in the following equivalent recursive form [22]
where
Definitions for variable-order case presented below exhibit different behavior; however, for constant order all of them are equivalent to Definition 1. The first one is obtained by replacing a constant order by variable order . The -type of fractional variable-order difference is given by
where
The second definition assumes that coefficients for past samples were obtained for an order that was present for these samples. The -type of fractional variable-order difference is given by
where
Besides the above iterative definitions, we use also the following recursive type of variable-order difference definitions.
The -type of fractional variable-order difference is given by
where
The -type of fractional variable-order difference is given by
where
Using matrix representation of (8), which is presented and described in detail in [23], the -type difference in recursive form given in (8) can be rewritten in the following iterative form [29]:
where
and for
where for
Recursive Form of Fractional, Variable-Order -Type Difference Definition
Proposition 1.
The recursive form of -type difference is the following
where
Proof.
Let us use the following iterative form of -type difference definition [29]
composed with , i.e.,
which, thanks to duality property, yields
from which
where we used the fact that .
Finally, denoting , we obtain
□
3. Fractional Variable-Type and Order Difference
Let us consider one of the known variable-type and order differences that is the -type difference of fractional variable-type and order which is defined as follows [25]:
where
The variable-type, -type difference defined in (13) defined for switching between a -type difference and -type difference can be presented in an equivalent schematic form depicted in Figure 1a.
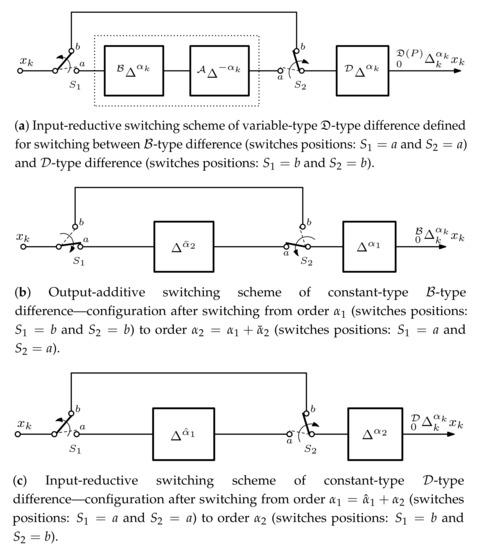
Figure 1.
Simple variable and constant-type switching schemes.
The constant-type - and -type differences, occurring the in switching scheme presented in Figure 1a, possess their equivalent switching scheme forms depicted in Figure 1b,c, respectively.
3.1. Main Result—Practical Realization of -Type Variable-Type and Order Difference
As can be seen from Figure 1a, a realization of -type difference is practically impossible because of the duality between -type and -type differences that is taking place. We are not able to build two ideal differences of opposite orders using electronic elements such that over time their serial connection will yield and output the original input signal. For this reason, in order to build an analog model of -type difference, we are forced to develop a different realization method. Such a method is conceptually illustrated in Figure 2 and formally described in Theorem 1.
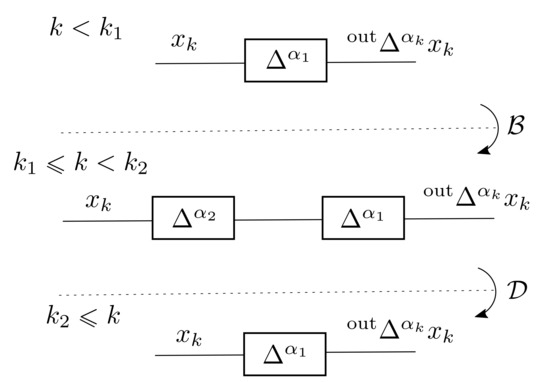
Figure 2.
Conceptual analog model realization scheme of -type difference.
The idea presented in Figure 2 comes mainly from schematic equivalent forms of - and -type differences presented in Figure 1b,c respectively.
Theorem 1.
Proof.
For the first step () there is only one integrator of order equal to . The recursive relation (given by (3)) in this case is given as follows:
Taking into account that for we can rewrite this as
For the second step () we have a switch according to the -type rule that the -integrator is added from the beginning of the chain. The recursive relation in this case is given as follows:
where
For the third step, again, we have one integrator of order , because according to the -type switching rule, the -integrator has been rejected from the beginning of the chain. The recursive relation in this case is given as follows:
F which is equal to the following formula
where for .
This finally gives
where
□
4. Analog Model of -Type Variable-Type and Order Operator
The realization of fractional variable-type and order operator directly based on conceptual scheme is depicted in Figure 3. In this case, the duality property requirement can be omitted. Thus, the main parts of the analog model are
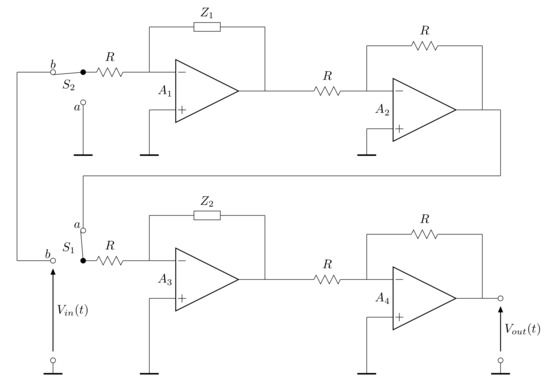
Figure 3.
Analog model of fractional variable-type and order operator.
- Data acquisition card dSPACE 1104;
- Half-order impedances deeply described in [22], denoted as and ;
- Operational amplifiers TL071 denoted as and ;
- Analog switches DG303 denoted as and ;
- Resistors k.
As can be seen, the fractional orders depend on impedances , and positions of switches , . Due to the use of the operational amplifiers , in inverted input configuration, it was necessary to add the supplementary ones denoted as and with gain . Obviously, such analog model corresponds to the system in continuous-time domain. However, considering the digital nature of A/D and D/A converters of dSPACE card and constant time step h, which was used to collect all experimental data, it can be considered as a discrete model given by Equation (13). Moreover, to fulfill the simplified switching definition concept presented in Figure 1, the switches and change their terminals in the following scenario
It gives the varying order and system parameter equal to
Experimental Results
It is worth noting that an origin of the investigated analog model was analytically proved. Based on it, the behavior of said system corresponds to fractional variable-type and order operator, regardless of input signal. The entire experiment was carried out with time-varying parameters, and to emphasize the equivalence of experimental and numerical data, the Heaviside step function form of input signal was chosen.
Moreover, the sampling time plays a major role during discretization process. Decreasing of sampling time leads the data to be more accurate and it negatively affects the computation process. On the other hand, increasing of sampling time cause the inaccuracies in data but it makes the computation process less time-consuming. Thus, the sampling time should be carefully chosen to keep balance between data accuracy and computational time. Since the electrical circuit is a continuous-time system, the sampling time exerts an impact only on the data acquisition process.
The experimental data were collected with time sampling of s and input signal equal to , where is a Heaviside step function. It yields the following equation
where
and system parameters, such as and are forced by the switch configuration given by (14) and are described by (15), for , , , , , and .
A comparison between experimental data and their numerical implementation based on duality property (see Figure 1a) is presented in Figure 4. Moreover, in the same figure, the error between two sets of data is shown as well. By analyzing the step responses in Figure 4, it can be seen that until first switching time s, we can observe the step response of half-order integrator. Furthermore, until time s, the system response corresponds to the -type of fractional variable-order definition, where order has been switched from to 1. Additionally, starting with time , the switching method is equivalent to -type of fractional variable-order definition, where order has been switched from 1 to . Such combined switching process composes the fractional variable-type and order definition with high accuracy.
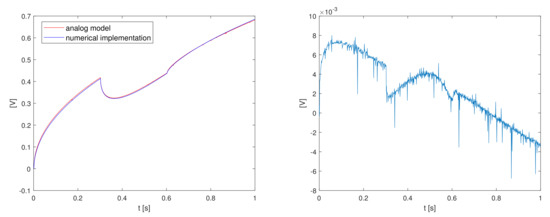
Figure 4.
Comparison between experimental data and its numerical implementation based on duality property (left); discrepancy between experimental and numerical data (right).
5. Conclusions
In this paper a practical analog realization method for variable-type and order operator with switching between - and -type definitions was introduced. In order to confirm the proposed scheme, an analog model has been build in order to collect experimental data. Data obtained from an analog model were compared with numerical simulations of variable-type and order operator. This comparison clearly presented that the proposed method is a very accurate and efficient one. Based on this analog model it is possible to obtain additional validation data, especially important when the analytical solution is very complicated or is unobtainable. The proposed model can also help to better understand the behavior of variable-type and order operators and generally fractional variable order calculus. Short discussion about possibilities for obtaining analogical results for switching between other definitions is presented in Appendix A, however, it seems that presented case is the only one valid case.
Author Contributions
Conceptualization, D.S.; Data curation, M.M.; Formal analysis, W.M. and M.S.W.; Methodology, D.S. and W.M.; Visualization, M.M., W.M. and M.S.W.; Writing—original draft, D.S., M.M., W.M. and M.S.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. Other Attempts of Realization Schemes
In this paper a method of practical analog realization for a variable-type and order operator with switching between and -type definitions was presented. It could be interesting if in a similar way switching between other definitions can be realized.
Let us assume the situation when the order is changed from type to . For analogically proposed schemes for other combinations of switching between different types of definitions, the results were inaccurate. For example, for the opposite situation of switching between and types, the corresponding scheme seems to be in the form presented in Figure A1.

Figure A1.
Conceptual analog model realization scheme of -type difference to switching.
Figure A1.
Conceptual analog model realization scheme of -type difference to switching.

Results obtained by a numerical simulation of the definition and for this analogical switching scheme, presented in Figure A2, clearly show that after switching of variable-order type of definition, we obtain different behavior.

Figure A2.
Comparison of results for numerical simulation for variable-order and type definition and numerical simulation for other scheme
Figure A2.
Comparison of results for numerical simulation for variable-order and type definition and numerical simulation for other scheme

It seems that the case of switching between to types proposed in Figure 2 is the only one valid case.
References
- Miller, K.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differenctial Equations; John Wiley & Sons Inc.: New York, NY, USA, 1993. [Google Scholar]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu, V. Fractional-Order Systems and Controls; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Magin, R.; Ortigueira, M.D.; Podlubny, I.; Trujillo, J. On the fractional signals and systems. Signal Process. 2011, 91, 350–371. [Google Scholar] [CrossRef]
- Dzieliñski, A.; Sierociuk, D. Fractional Order Model of Beam Heating Process and Its Experimental Verification. In New Trends in Nanotechnology and Fractional Calculus Applications; Baleanu, D., Guvenc, Z.B., Machado, J.A.T., Eds.; Springer: Dordrecht, The Netherlands, 2010; pp. 287–294. [Google Scholar]
- Sakrajda, P.; Wiraszka, M.S. Fractional variable-order model of heat transfer in time-varying fractal media. In Proceedings of the IEEE 2018 19th International Carpathian Control Conference (ICCC), Szilvasvarad, Hungary, 28–31 May 2018; pp. 548–552. [Google Scholar]
- Wiraszka, M.S.; Sakrajda, P. Switching Energy Loss in Fractional-Order Time-Varying Heat Diffusion Model. In Conference on Non-Integer Order Calculus and Its Applications; Springer: Berlin/Heidelberg, Germany, 2018; pp. 294–305. [Google Scholar]
- Sakrajda, P.; Sławomir Wiraszka, M. Fractional-order diffusion model for social networks. In Proceedings of the International Conference on Fractional Differentiation and its Applications (ICFDA), Amman, Jordan, 16–18 July 2018. [Google Scholar]
- Dzielinski, A.; Sarwas, G.; Sierociuk, D. Comparison and validation of integer and fractional order ultracapacitor models. Adv. Differ. Equ. 2011. [Google Scholar] [CrossRef]
- Quintana, J.J.; Ramos, A.; Nuez, I. Identification of the fractional impedance of ultracapacitors. In Proceedings of the 2nd IFAC Workshop on Fractional Differentiation and its Applications (IFAC FDA’06), Porto, Portugal, 19–21 July 2006. [Google Scholar]
- Freeborn, T.J.; Maundy, B.; Elwakil, A.S. Fractional-order models of supercapacitors, batteries and fuel cells: a survey. Mater. Renew. Sustain. Energy 2015, 4. [Google Scholar] [CrossRef]
- Sierociuk, D.; Sarwas, G.; Twardy, M. Resonance phenomena in circuits with ultracapacitors. In Proceedings of the 12th International Conference on Environment and Electrical Engineering (EEEIC), Wroclaw, Poland, 5–8 May 2013; pp. 197–202. [Google Scholar]
- Kopka, R. Changes in Derivative Orders for Fractional Models of Supercapacitors as a Function of Operating Temperature. IEEE Access 2019, 7, 47674–47681. [Google Scholar] [CrossRef]
- Kopka, R. Discrepancy between derivative orders in fractional supercapacitor models for charging and discharging cycles. In Proceedings of the 23rd International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 27–30 August 2018; pp. 567–572. [Google Scholar]
- Cai, W.; Wang, P.; Fan, J. A variable-order fractional model of tensile and shear behaviors for sintered nano-silver paste used in high power electronics. Mech. Mater. 2020, 145, 103391. [Google Scholar] [CrossRef]
- Zhang, Q.; Shang, Y.; Li, Y.; Cui, N.; Duan, B.; Zhang, C. A novel fractional variable-order equivalent circuit model and parameter identification of electric vehicle Li-ion batteries. ISA Trans. 2020, 97, 448–457. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.; Li, H.; Chen, N. An indicator for the electrode aging of lithium-ion batteries using a fractional variable order model. Electrochim. Acta 2019, 299, 378–387. [Google Scholar] [CrossRef]
- Ortigueira, M.D.; Valério, D.; Machado, J.T. Variable order fractional systems. Commun. Nonlinear Sci. Numer. Simul. 2019, 71, 231–243. [Google Scholar] [CrossRef]
- Valerio, D.; da Costa, J.S. Variable-order fractional derivatives and their numerical approximations. Signal Process. 2011, 91, 470–483. [Google Scholar] [CrossRef]
- Lorenzo, C.; Hartley, T. Variable order and distributed order fractional operators. Nonlinear Dyn. 2002, 29, 57–98. [Google Scholar] [CrossRef]
- Sierociuk, D.; Malesza, W.; Macias, M. Derivation, interpretation, and analog modelling of fractional variable order derivative definition. Appl. Math. Model. 2015, 39, 3876–3888. [Google Scholar] [CrossRef]
- Sierociuk, D.; Malesza, W.; Macias, M. On the Recursive Fractional Variable-Order Derivative: Equivalent Switching Strategy, Duality, and Analog Modeling. Circuits Syst. Signal Process. 2015, 34, 1077–1113. [Google Scholar] [CrossRef]
- Macias, M.; Sierociuk, D. An alternative recursive fractional variable-order derivative definition and its analog validation. In Proceedings of the International Conference on Fractional Differentiation and its Applications, Catania, Italy, 23–25 June 2014. [Google Scholar]
- Sierociuk, D.; Twardy, M. Duality of variable fractional order difference operators and its application to identification. Bull. Polish Acad. Tech. Sci. 2014, 62, 809–815. [Google Scholar] [CrossRef]
- Malesza, W.; Sierociuk, D. Recursive variable type and order difference, its definition and basic properties. In Proceedings of the 2016 17th International Carpathian Control Conference (ICCC), Tatranska Lomnica, Slovakia, 29 May–1 June 2016; pp. 473–478. [Google Scholar] [CrossRef]
- Sierociuk, D.; Malesza, W. On the differences of variable type and variable fractional order. In Proceedings of the 2016 European Control Conference (ECC), Aalborg, Denmark, 29 June–1 July 2016; pp. 2191–2196. [Google Scholar] [CrossRef]
- Sierociuk, D.; Malesza, W.; Macias, M. On the Output-Additive Switching Strategy for a New Variable Type and Order Difference. In Theory and Applications of Non-Integer Order Systems; Babiarz, A., Czornik, A., Klamka, J., Niezabitowski, M., Eds.; Springer: Cham, Germany, 2017; pp. 101–111. [Google Scholar]
- Sierociuk, D.; Macias, M.; Malesza, W. Analog realization of fractional variable-type and -order iterative operator. Appl. Math. Comput. 2018, 336, 138–147. [Google Scholar] [CrossRef]
- Sierociuk, D.; Malesza, W. Fractional variable order discrete-time systems, their solutions and properties. Int. J. Syst. Sci. 2017, 48, 3098–3105. [Google Scholar] [CrossRef]




© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).