1. Introduction
Recent advancement in wireless technologies and electronic systems leads to the implementation of wireless sensor networks (WSN), which is a most important part of the internet of things (IoT). A WSN consists of sensor nodes, which include sensing units, power supply, on-board memory and transceiver [
1]. These nodes are able to sense physical phenomena, exchange data among nodes with in a network. The WSN might have some anchor, beacons and sink node, which is used to collect data from other sensor nodes and send to the end user or applications. The sensor network can be deployed with the passion of low cost solution, which makes this technology more practical in many applications like home automation, surveillance, cattle farming and even in areas where human interaction is almost impossible [
2]. For inaccessible areas, the nodes are dropped using planes or robots. However, to gain important and useful data some application requires to have the location information. In future sensors will deploy everywhere due to cost effective solution, so the sensor location issues become more and more important. To date many solutions come to the market on the problem of indoor location estimation for both commercial and research purpose. The research environment attentive on different communication networks, such as LANs, infrared, low rate WPAN, WLAN’s, ultrasound and recently visible light communication. The determination of sensor location is an important and crucial issue for wireless ad-hoc sensor network. Since sensor networks are often developed in a layered network protocol stack. Sensor localization is necessary for those location aware applications, processed data based on physical location. It is therefore necessary to detect the each sensor location in a wireless sensor network after their deployment. One of the most popular and widely used technologies for localization is global positioning system (GPS). But practically it is hard to use GPS due to (1) Because of line of sight issue GPS is not always available. For instance, it does not work indoors, under water or in a subway; (2) Due to high energy consumption and cost it is impossible to equip each sensor node with GPS and other devices; (3) Sensors are designed to require low-power but GPS receivers are highly power consuming. Therefore, we look forward towards some indirect methods to determine the locations of sensor nodes [
3].
Many network design challenges can influence the localization process [
4]. Obviously, the design objective is to gain high accuracy, full network coverage and with the consumption of low energy. Most of research work has been investigated on two dimensional (2D) localization, which require at least three independent measurements to unambiguously find a location. To compensate stochastic (unpredictable) faults, there must be an optimal solution for addressing the error budget significantly. Therefore, this paper addresses a technique based on three dimensional (3D) localization based on social network analysis (SNA). SNA views the social relationship in
nodes and
ties form in which
nodes are the individual actors and
ties are the relationship among actors. In many applications of sensor networks some important components need to be explored. In SNA Centrality is a metric which is used to denote such importance within a network. There are various measurements of centrality presented in SNA, the detail of which is available in
Section 3. The rest of the paper is organized as follows.
Section 2 describes the related work while a brief review of wireless localization techniques and SNA is provided in
Section 3.
Section 4 presents the system model, followed by the proposed SNA-based localization algorithm for WSNs in
Section 5. Finally,
Section 6 presents the simulation results and
Section 7 concludes the paper.
2. Related Work
Short range wireless communication technologies for WSNs include Wi-Fi, Zigbee, and Bluetooth, and so forth. ZigBee is a low cost, low power consumption, large network size and low data rate which is a communication protocol based on IEEE 802.15.4 standard [
3]. Applications of Zigbee based WSNs include agriculture and smart homes, habitat/environmental monitoring, and device tracking [
5]. For example, the most popular 6LoWPAN, LoRA, and WirelessHART, based on radio standard, are progressively used for office automation and wireless machine-to-machine (M2M) communication [
6].
In general, the localization algorithms are classified into two categories, range based and range free, as shown in
Figure 1.
In range-based localization systems, distance is estimated using techniques like Time of Arrival (ToA) [
7], Time Difference of Arrival (TDoA) [
8], Angle of Arrival (AoA) [
9] and RSSI [
10,
11,
12,
13,
14]. After getting the distance measurement, the localization is performed by using triangulation, trilateration or the maximum likelihood method [
15,
16]. Range-based systems are fairly accurate except those using RSSI as a distance estimator because RSSI measurements are intrinsically noisy [
16]. In a range based algorithms, one may focus on reducing the adverse effects such as nonline-of-sight problems. This may function well for single-target localization. However, multiple objects localization is required in many applications. Although it is possible to implement a single target algorithm for all the nodes within a network, it will unavoidably increase the communication as well as computation cost.
On the other hand, range-free localization systems used sensing features such as event proximity or wireless connectivity information [
17,
18,
19]. These can provide location information in low cost but with reduced localization accuracy. The most well-known solution for range free algorithms is fingerprinting (computed in two phases—online and offline). Fingerprinting-based localization algorithms can be divided into several groups such as the ray tracing model [
20], support vector machine [
21], data mining techniques [
22], probabilistic methods [
23] and others based on kalman filtering [
24], which were designed to explore online RSS samples that are stored in the first phase of offline data base. Fingerprinting may result in large localization errors in dense environments due to reflection, multipath fading, diffraction and other factors like terrain and signal attenuation [
25,
26]. The range-free localization schemes become more renowned in WSN localization due to its reasonable accuracy, ease of implementation, low cost and low power utilization. A very well-known range-free scheme, approximation point-in-triangle (APIT) was proposed in Reference [
27], which was based on point-in-triangle test (PIT). In APIT scheme, a target node selects three other beacon on the network and tests whether it is inside the triangle or not. This can be accomplished by exchanging the reference coordinates, performing PIT test, aggregation of the data elements and computing the location information using centroid method. Ad hoc position (APS) algorithm was proposed in Reference [
28] is another range-free localization technique based on multilateration. APS is a distributed technique and does not require any special deployment infrastructure, which use global coordinates with better localization accuracy. Another well-known method based on multiple dimensional scaling mapping (MDS-MAP) was proposed in Reference [
29], which is a range free algorithm based on mathematical psychology that provides location information as a gemotrical proximity.
In the literature, the idea of social networks is only used for two-dimensional (2D) localization systems by using Betweenness centrality [
30]. In this paper, we propose to use closeness centrality (CC) for measuring the localization. The formation of clusters and cluster head for initiating the process will also decrease the communication and computation cost. Furthermore, the nature of CC motivates us to utilize it for computing the localization error that work in hybrid nature. CC will avoid any extra shortest path algorithm in computation process, because CC itself acts as a distance measurement using the shortest path scenario.
4. System Model
In WSNs, the target nodes can measure its own distance from v anchor nodes. We assume that sufficient anchor nodes are available to form a cluster for SNA, and the anchor nodes are receiving their RSSI information from the sensor nodes with in a cluster. We further assume that the system is aware of any loss of a anchor node with in a cluster. Consider a large-scale WSN with V anchor nodes () and N target nodes () deployed randomly in a 3D space.
The SNA is acting as a graph, that is,
, where
is a reference anchor node and
is a target node in a network. Considering that the IDs of all nodes are broadcast in the network and the node with highest CC value can represents a cluster
. The nodes are deployed randomly, so that the system works efficiently upon different topology structure, indicating the system robustness. Let us consider that the anchor node position is known and we set the path loss exponent to
and power loss
dB. Our proposed idea is suitable for patient monitoring, and even in cattle monitoring where the cattles are in the form of a group. SNA has been recognized as a useful approach for studying the inter-connectivity of individual or collective actors in social processes such as communication flows or decision-making situations. Due to the practical nature of SNA, it is easier to get the location information. The wireless signal model and channel gains for RSSI computation is taken from Reference [
31] as shown in
Section 3.1. It is interesting to note that we include imperfect channel statistics rather than complete instantaneous channel state information (CSI) [
35]. It is further assumed that the channel gain remains constant during a beacon transmission and channels are independent of each other. The most widely applied signal propagation model is the log-normal shadowing model.
where
is a path loss at each reference distance from anchor node to unknown node.
is assumed to be
and
n is the path loss exponent.
) is a noise model. The log-normal model can be fully explain the relationship between RSSI data and CC values. If the indoor environment changes, different transmission models of indoor wireless signals are adopted to fit into various situation. The CC value and RSSI data is measured for different situations and the corresponding transmission model is found which improves the accuracy of node localization.
where
P and
d is an RSSI value and distance between transmission and receiver respectively, and
is a fitting coefficient. The value of
coefficient is measured through the least square methods which leads to the least localization error.
5. Proposed SNA Based Localization Algorithm
The RSSI is used for distance estimation after selection of the node with highest CC value. The radiation distance is minimized by using the clustering concept. The node then will be connected to that cluster. Furthermore, trilateration plays an important role in the formulation of the cluster.
In this paper, we aim to localize the target nodes deployed in indoor environment. The use of SNA helps to localize the node itself even in the case of node failure. The calibration factor can select another nearest node in case of any link or node failure. The key idea in our proposed localization algorithm is to introduce clustering to connect each unknown node with the nearest cluster to minimize radiation distance. RSSI measurement is used with trilateration with three selected anchor nodes. The selection of these nodes is based on clustering having highest closeness centrality values among anchor nodes. Our proposed SNA-based WSN localization scheme has three phases.
5.1. Training Phase
In a first phase, the anchor nodes with highest CC values are chosen. This can be done with the following conditions:
After initial deployment of the sensor nodes.
Node failure or damage due to hardware or software defect which lead to different network topology, that may be noticed by the absence of sensor ID during the localization process.
Any change in the network, for example, deployment/redistribution of the sensor nodes in the network.
After certain periodic predefined time as a hand shake timer between nodes.
The following steps are performed to select the anchor nodes based on highest CC.
All anchor nodes broadcast their IDs to other neighbors within a sensing region, sequentially in certain periodical time. In this case,
broadcast its ID to other nodes
in a network. The modulated signal will be of the following form:
When the broadcasting anchor node has the information of ID and distance from other anchor nodes, it measures the reciprocal of the total distances to other nodes.
To compute the CC values, we have
, and the other nodes also compute highest CC values using the same relation.
After calculating all CC values, the central matrix will be sorted in descending order of the CC values. The node with the highest CC value has the minimum and most central location to other nodes inside the network. The sorted matrix of CC will be exchanged to other nodes in a network. The algorithm of training phase is described in Algorithm 1.
Lemma 1. The of an anchor node v is in non directional state. The graph is maximal if all the anchor nodes are adjacent to each other in a graph.
Proof. Let us assume that a set of anchor nodes are adjacent, then ultimately the distance between all nodes is 1 thus . Let another node is not adjacent to , then the distance is at least 2, .□
Lemma 2. Let with anchor nodes be an CC instance. If a set of distances with size k. So, if I is a positive instance, the set of anchor node S lies in I such that for each .
Proof. Let the distance between the anchor nodes be a degree to in a graph G. There are total nodes after adding k edges to the . As the anchors are not adjacent, the graph distance is at least 2 as in Lemma 1. The centre point and the distance to each cluster head to anchor node is optimal due to the same distance value on each side.□
Definition 1. The highest CC value is the lowest distance from anchor node to other nodes in a network to form a cluster for localization.
| Algorithm 1 Training Phase |
- 1:
Initiate the length of working area (working boundary) - 2:
Initialize the maximum range of RSSI and total distance of radiation among anchor nodes - 3:
Set number of nodes ⟶ - 4:
Randomize the sensor nodes - 5:
whiledo - 6:
Initialize total distance between nodes - 7:
Record CC values based on distance - 8:
while do - 9:
Calculate distance ⟶ dist = - 10:
- 11:
end while - 12:
Sort matrix[I] ⟶ Countsum (CC) - 13:
end while
|
5.2. Clustering Phase
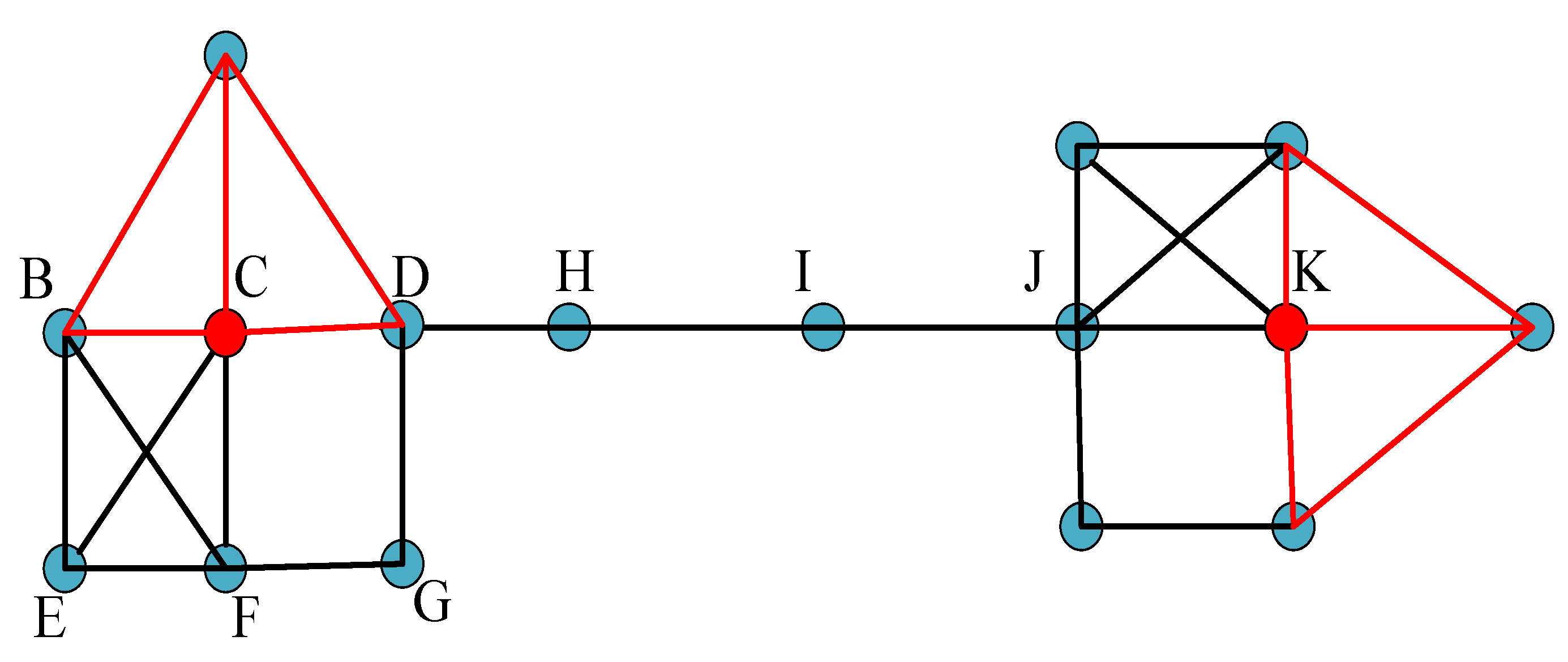
The second phase is to formulate the clusters based on the highest CC values of target nodes. Clustering helps to minimize the number of computations for anchor nodes in localization process which also minimize the radiation distance among unknown nodes and anchor nodes. Clustering schemes splitting the networks in separates groups of nodes individually cantering around maximum CC value. In SNA based solution, the selected number of anchors are not less than four to perform trilateration. By increasing the number of anchor nodes, the more clusters are formulated that even increased the localization accuracy.
Let us consider four anchor nodes
, which only form one cluster in a network. But as per modulation process if there are five anchors
, it can forms five clusters in a best case scenario. With five possible combinations, we have
,
,
,
,
different clusters as described in
Figure 4 taken from Reference [
36].
The relationship between number of anchor nodes and number of clustered is computed by:
where
denotes the number of clusters formulated by the available number of anchor nodes,
is the set of anchors and
V is the minimum number of anchors used for trilateration process. As demonstrated in
Figure 5, the closest anchors to unknown node
are the nodes in cluster
, which is marked by red dotted circle, and these nodes are
. All other clusters
are far from the unknown node
, it is not feasible to complete trilateration process with those anchor nodes. But if a node in a cluster
is damaged due to some software or hardware error, it can make a new cluster after sending modulation signal having node ID to the possible nearest node, leading to high localization error in trilateration process.
The algorithm of clustering phase is described in Algorithm 2.
| Algorithm 2 Clustering Phase |
- 1:
get number of available clusters from ( 17) - 2:
fordo - 3:
calculate central point of each cluster by taking average of each for the four anchor nodes in a given cluster = . - 4:
end for - 5:
fordo - 6:
initialize minimum distance - 7:
for do - 8:
for all clusters set minimum distance . - 9:
end for - 10:
end for - 11:
fordo - 12:
measure distance between each unknown node and anchor node. - 13:
get RSSI for trilateration in next step. - 14:
measure the noisy signal data for overall performance. - 15:
end for
|
Definition 2. Given a graph, with every vertex distance is 1. is a cluster if the following conditions are true.
- 1.
Indegree:
- 2.
Outdegree: .
5.3. Localization Computation
After selecting the closest cluster to the unknown target from all available clusters, trilateration process takes place to localize the unknown node. Consider anchor nodes
having distance
as shown in
Figure 5, the spheres equations are:
In further expansion the above equations can be written as in final matrix form [
16]:
In this phenomenon anchor node
is beyond the cluster of target node
. The RSSI value and cluster information is used in trilateration process to compute the node position using (
22). The error in localization is given by:
where
are the estimated values of the target node. The average localization error is then measured by
.
The algorithm of Trilateration and error calculation is described in Algorithm 3.
| Algorithm 3 Trilateration and error calculation |
- 1:
Calculate ∀ using Equation ( 22). - 2:
initialize localization error ⟶ - 3:
fordo - 4:
Calculate error ∀ using Equation ( 23). - 5:
- 6:
end for - 7:
|
Average localization error provides a general indication of the accuracy of the overall system. Our target is to minimize the localization error and enhance the performance of proposed solution. CC is very helpful in measuring the node’s distance, with minimal computation load on the target side. Most of the computational load is with the anchor nodes, thus reducing the computational and energy cost for other nodes.
6. Simulation Results
For the setup of simulation, sensors are randomly deployed in
working space as shown in
Figure 5. It simulates an indoor WSN that has
V anchor nodes and
N target nodes.
6.1. Accuracy Analysis
Random deployment makes the localization algorithm more robust for different network topologies. In our simulation, the path loss exponent is set to
and power loss
dB. The performance metric of our proposed algorithm is based on CC values. Root mean square error (CCRMSE) is defined as:
We choose 100 anchor nodes and 160 unknown nodes. The CC between the nodes are computed by Equation (
11). The nearest cluster is chosen based on the highest CC value. The highest CC valued anchor nodes and associated cluster can further select three nodes for trilateration. The anchor nodes
form a cluster for node
due to having the highest CC and nearest cluster as shown in
Figure 4. The target node
is only at a distance of 1m from
. Let us consider another scenario, if the node
is damaged then system needed to calibrate at a certain period of time [
37]. In this case the formulation of the new cluster and computation of the highest CC value is required. The formulation of cluster and CC computation is shown in
Figure 6. It shows that there might be 70 possible clusters in the case of 8 anchor nodes, which is computed by Equation (
17).
6.2. Localization Error
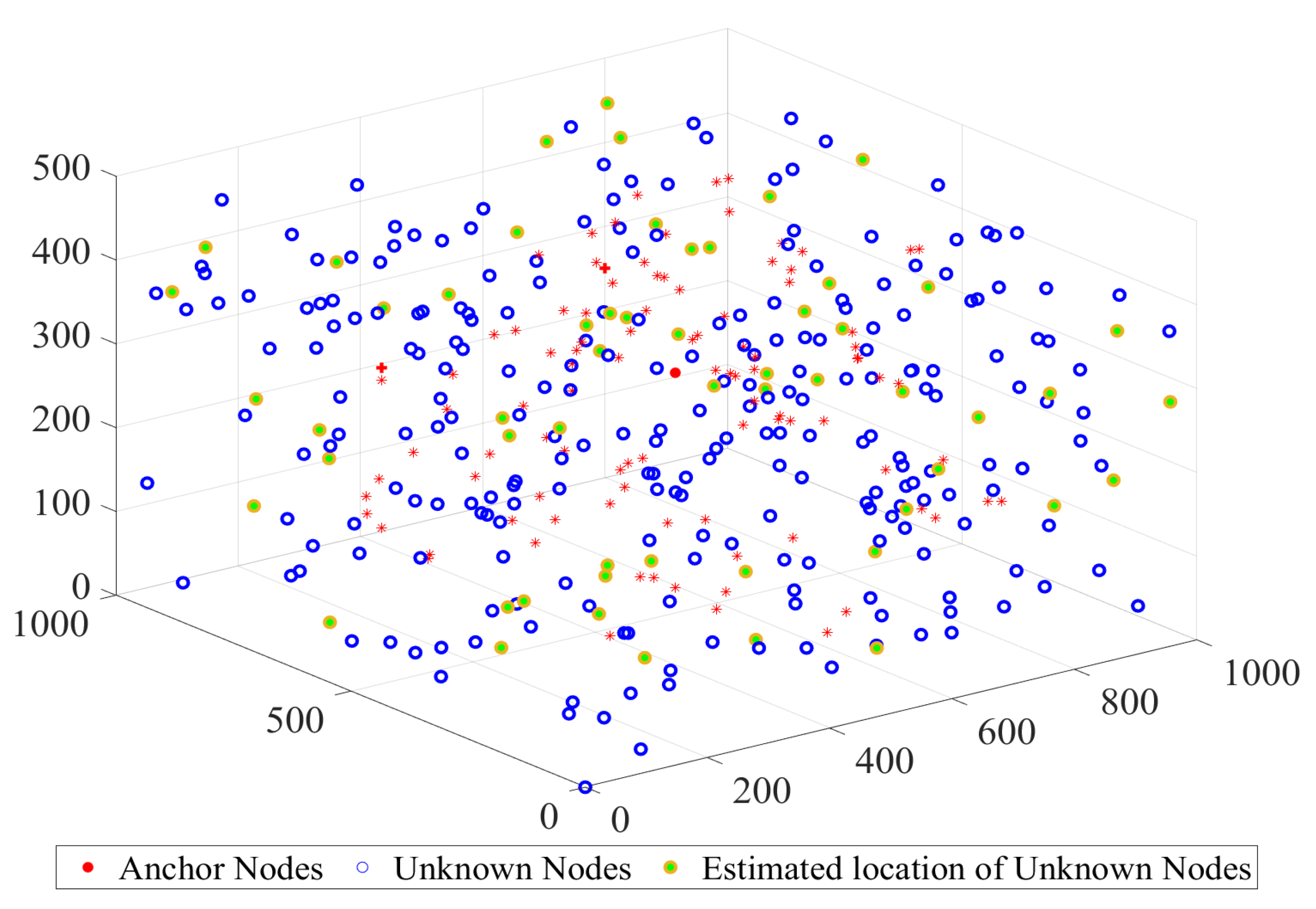
The initial deployment of anchor nodes, target nodes and estimated position of target node is shown in
Figure 7. The simulation is performed using the RSSI data set obtained from github geolife trajectories [
38]. The accuracy of the CC based metric is directly proportional to the highest clustered values from the RSSI data set. The simulation shows that the localization error of the SNA based algorithm on each axis is about
m and the average localization error of
m by trilateration as shown in
Figure 8 with a CDF plot in
Figure 9.
The CDF is a statistical tool that gives indication of probability for the average localization error
to take value with in the range of
given by the relation:
For further analysis of the anchor nodes’ density, the number of anchor nodes is increased gradually to check the system performance. It is understood that the localization error decreases due to a lot of clusters in the presence of higher number of anchor nodes.
The communication cost is one of the crucial and significant factors that affects the performance of the WSN localization technique, especially when using sensors with high power consumption. It differs from the computation cost because computation cost refers to the cost of calculation processes between nodes and anchors, the communication cost deals with the energy of transmitting, receiving, listening, sleeping and switching. For the communication cost modeling, the standard that is used here to cover the test area will be 802.11 g, which can cover a range of 1000 m, with transmission power of 2.3 mW and receiving power of 1.9 mW. For transmitting and receiving energy they are
nJ/bit, and
nJ/bit, respectively. The system contains
N sensor nodes that are identical in communication range
r and having a unique ID. The test area is homogeneous. Our model for communication cost is denoted as
:
where
is the amount of energy required to transmit the data.
is the energy consumption while receiving the data packet.
is the energy consumption by the sensor while it is active but not receiving and transmitting any data packet.
defines the switching energy state for the anchor nodes.
is the energy for switching state from sleeping mode to either transmission or receiving mode.
where
is the power required to transmit data,
is the length of transmitted packet and
represents the time to transmit 1 bit at certain period of time.
where
is the power consumption during receiving state and
is the length of received data packet.
where
is the power consumed when the sensor in the mode of listening and
is the periodical time between the states of being listening for the sensor.
where
is the power required when the sensor switches from one state to another one, while
is the switching time between these states.
where
is the power through sleeping mode for the sensor and
is the sleeping time.
6.3. Effect of Rayleigh Fading and Noise
From the central limit theorem, RSSI can also be represented through Rayleigh PDF and Gaussian random complex variable given by [
39]:
where
is a component manipulating the Rayleigh factor.
is set to be
with
which describe the Rayleigh process with zero gain. The Rayleigh fading effect is also in our consideration to check the performance of our proposed system. RSS shows different and unique characteristics on variations in signal amplitude over time and frequency caused by fading. At first, we assume all the nodes in a network are stationary, without any noise and fading having
. Conversely, when fading is present, the power samples is multiplied with
, where
x is a random variable for fading amplitude presented in (
33).
Two main properties of radio irregularity, namely continuous variations and non isotropic, the path loss is adjusted based on
the mean, and
, the standard deviation of the form
. When studying CC, we consider 150 anchor nodes and 90 other unknown nodes to check the performance of the proposed localization scheme after adding Rayleigh fading as shown in
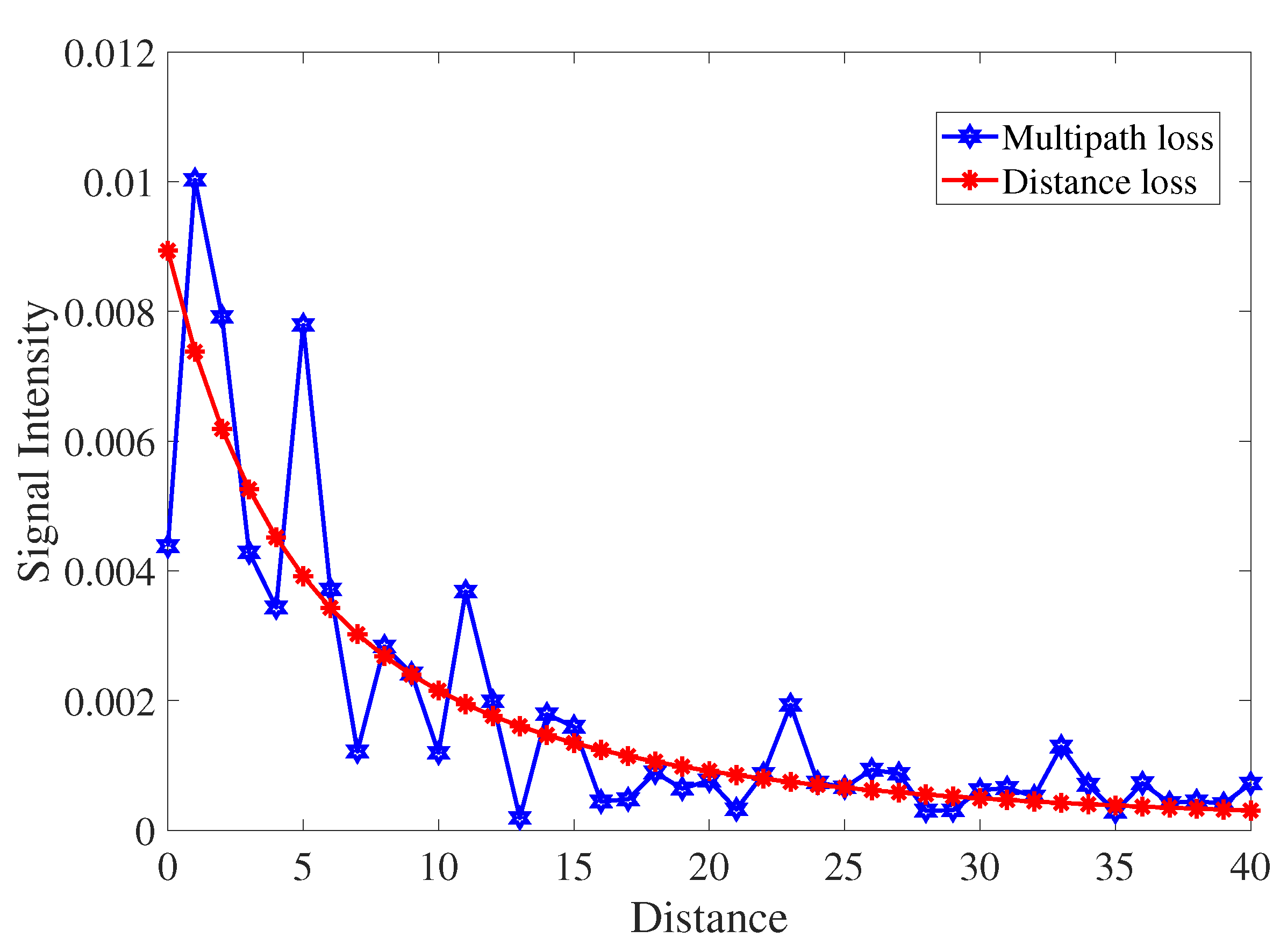
Figure 10. The results are from 1000 iterations and we observed a slight change in overall performance of the system. This change does not affect the performance of the system due to closeness centrality test after a certain period of time. The signals are attenuated between sender and receiver in any communication channel. To obtain the RSSI characteristics, we measured RSSI at different distances up to 1000 m. The noise also affects the signal intensity as shown in
Figure 11. Furthermore, transmission loss is measured by adding power factor to the CC values. For non least square fitting to a Gaussian function, we squared the CCRMSE from (
24).
6.4. Comparison with Existing Methods and Computational Complexity
It is interesting to compare our results with the other 3D based localization techniques discussed in
Section 2. First we discussed the performance of traditional APIT algorithm. In APIT, if a node is away from the triangle and unknown node, it is presented outside the triangle so the test fails and the node do not localized. Obviously, this selection is very important as neighbor node play an important role in selection of the triangles. This problem is solved in the proposed SNA algorithm where the node can select the nearest anchor node if a node is failed or down next to it. The ties between the clustered area is also increased and have a chance to localize multiple nodes within a cluster which also overcome the computation cost.
MDS-MAP is a classical multidimensional mathematical scaling that has origins in psychophysics and psychometrics. The distance is expressed like geometrical pictures shown as an information visualization or exploratory data. Therefore the complexity of MDS is always very high due to extra mathematical computation giving a time computation of . In simple scenarios the localization accuracy is above 2 m where distance between every pair of nodes is crucial. The SNA based idea also overcomes the pair computation and ties up with the new relation even if a node fails. That is why there is a improvement in our proposed solution.
For evolution purposes, two different topologies—C-shaped and uniformly distributed square regions—are considered to check the network coverage area while increasing the connectivity level, number of anchors and sensor nodes and distance between different anchor pairs. The connectivity level was increased between 11 and 31 by changing the radio range. The simulation was run for 1000 times and almost
and record the localization error. The error in case of MDS-MAP and DV-Hop is above 2 m in some cases. While the use of clustering in our proposed solution is below
m. The worst-case complexity for SNA based algorithm is derived from interior algorithms [
40]. The SNA provides a unique solution when having
pair of nodes with a known distance. However the use of CC as a SNA reduce the overall complexity of proposed solution. Even in the case of node failure the SNA calibrates itself and forms a new cluster to run the process of localization efficiently.
The average localization error was obtained after 1000 iterations. We noticed that clustering of the social network gives high performance rather than some existing methods like DV-Hop, and MDS-Map and advanced DV-Hop schemes as shown in
Figure 12.
7. Conclusions
Node localization plays a vital role in providing meaningful data in most applications of WSNs. Many researchers proposed 2D based localization algorithms; however, most of them are based on the assumptions of accurate synchronization between sensor nodes, which can be difficult or sometimes impossible to achieve in an uncontrolled environment. This paper proposed a novel 3D localization algorithm based on the well-known Social Network Analysis algorithm, which is free from node synchronization and thus only requires determination of the Closeness Centrality to form a clustering for trilateration. The simulation results shows that the proposed SNA-based localization algorithm can achieve an average error distance as low as m, which can be further reduced while increasing the node density. The idea of SNA based on CC provides high accuracy where less computation is required in order to achieve high accuracy with low energy consumption.
However, there is still some room for further studies, such as the impact of anchor node localization error. It is also worth studying how to adopt mobile anchor nodes to further improve the localization accuracy.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











