V2G Strategy for Primary Frequency Control of an Industrial Microgrid Considering the Charging Station Operator

 ,
,  ,
,  ,
,
Abstract
1. Introduction
- 1)
- The article presents a novel primary frequency control through V2G strategy in an IMG, involving effective coordination of CSO, the EV aggregator, and the EV operator. A systematic structure incorporating the EV aggregator, EVs, and CSO is developed to ensure the PFC.
- 2)
- The performance of the MG in the PFC is investigated with the same SOC levels of EVs that have been presented in the literature; however, different power charging/discharging demands of EVs are not acknowledged properly by previous works. Therefore, the EV charging power based on the departure time, the real-time battery SOC level, and the expected SOC is recalculated at each step and then adjusted in real-time. This operation is done with the effective role of the CSO.
- 3)
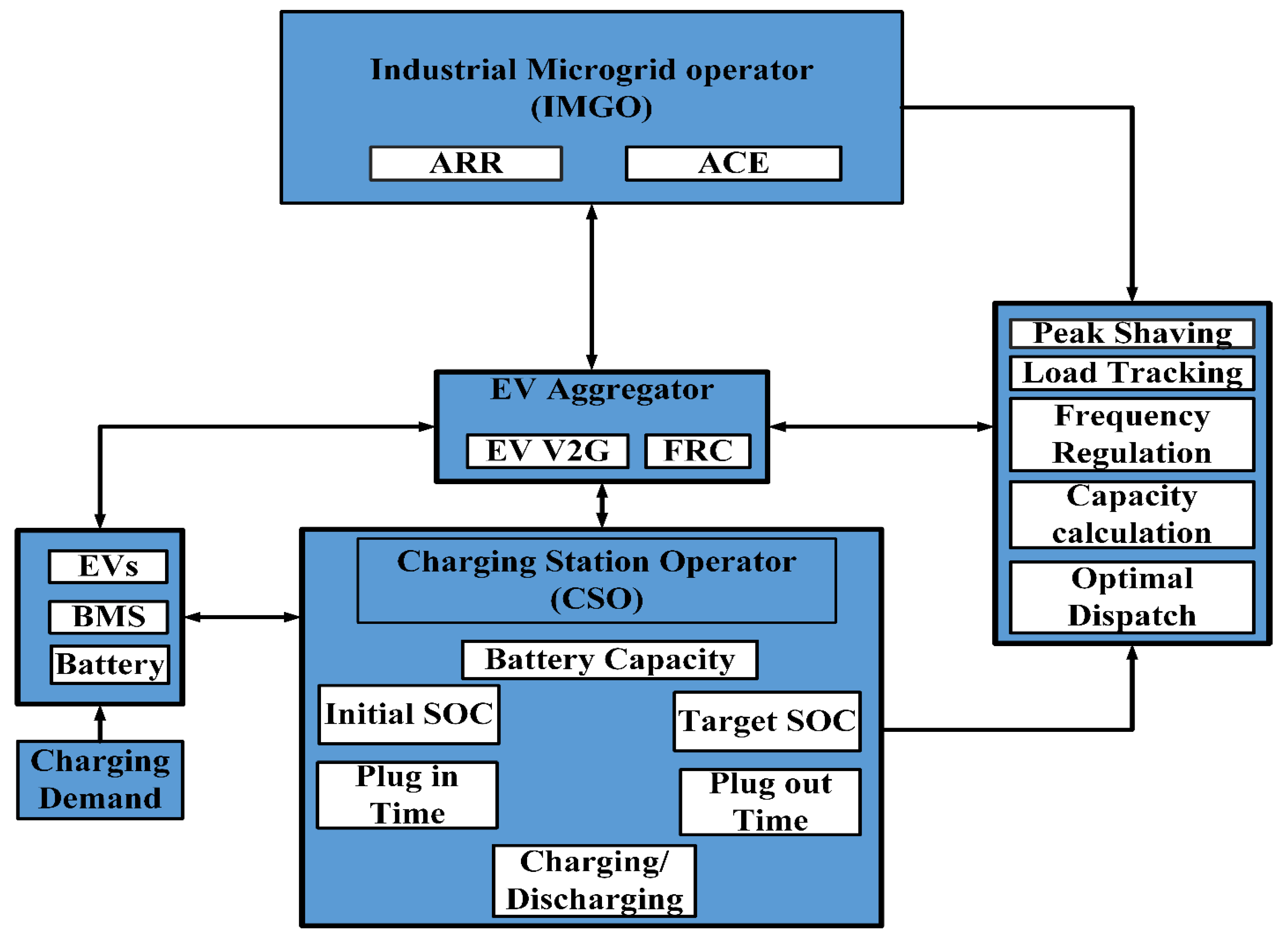
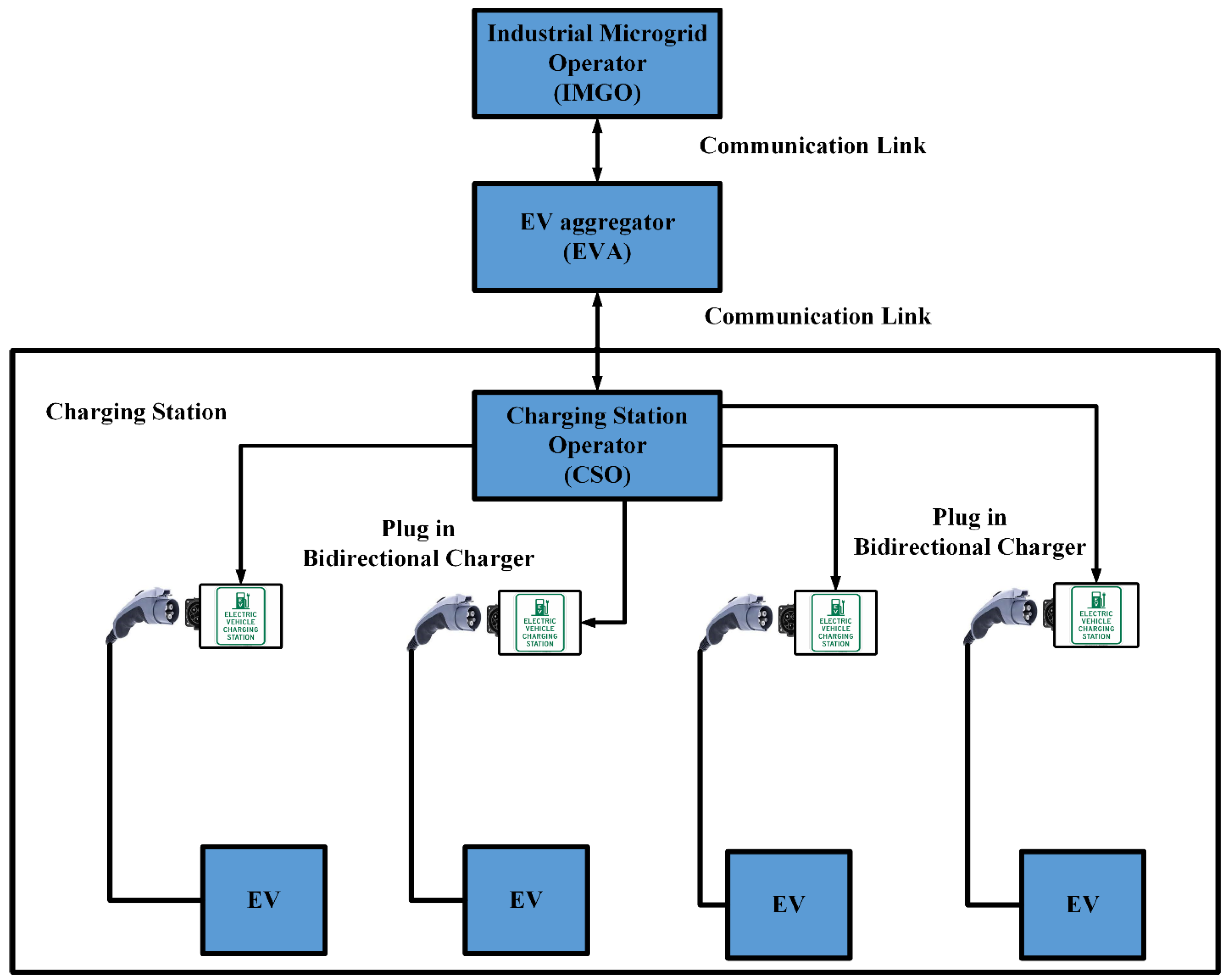
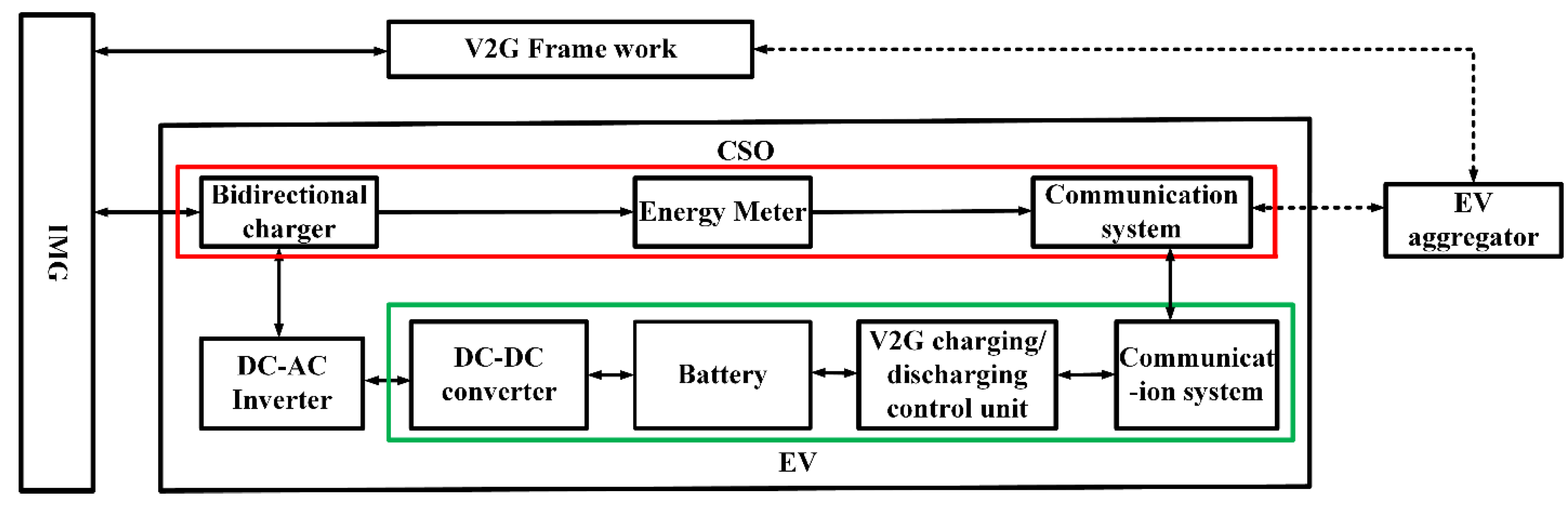
- The main components of this novel V2G strategy are the industrial microgrid operator (IMGO), the EV aggregator, the CSO, and the EVs themselves. The concept of CSO is introduced, which coordinates with the electric vehicles aggregator (EVA) and accordingly charges and discharges the EVs.
- 4)
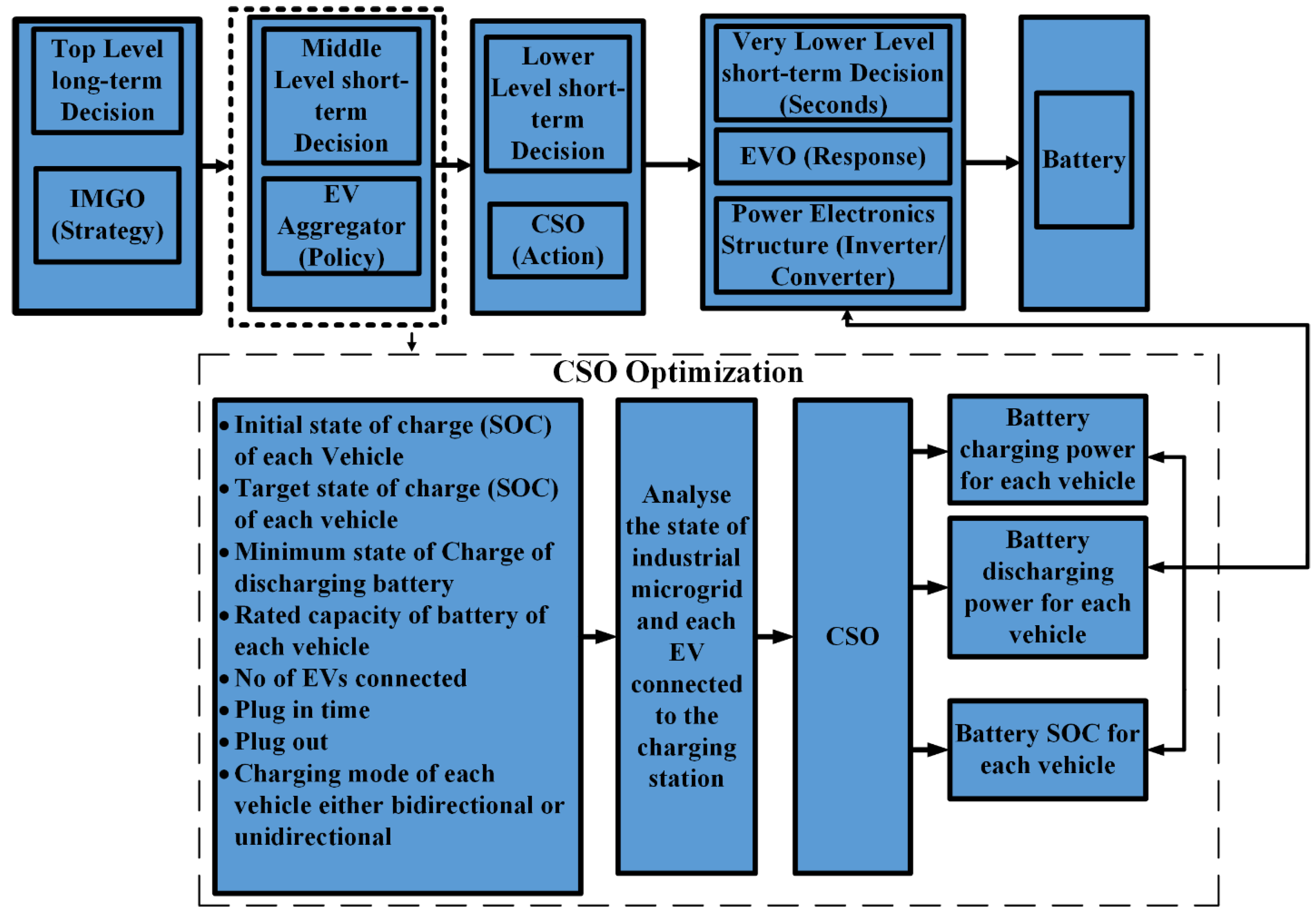
- The CSO collects the data, analyses it, and solves the optimization function periodically. When an EV is parked and connected to the charging point at the charging station (CS), the record maintenance is ensured, with regards to EV’s state of charge, arrival, and departure time, number of EVs on the chagrining/discharging mode. The recharging socket outlet records the connection time and collects information from the EVA in order to solve the issue regarding the connection or disconnection of a new EV.
2. Proposed Architecture
- a)
- In general operation, the performance of the generating section of IMGs is consistently monitored, controlled, and counterbalanced, as per the IMG operator signals. On the other hand, the capacity of power for a single EV can be ignored. Thus, the function of the EV aggregator is that of a middleman, providing a link between EVs and IMGs.
- b)
- Similar to the power generation units, the frequency regulation capacity (FRC) of the EVs should also be consistently monitored for correct dispatch of IMG operator signals to EVs. This means that the electric vehicles aggregator (EVA) is also responsible for FRC estimation and regulation tasks assigned by IMGs to EVs.
- c)
- The centralized charging/discharging of aggregated EVs performs the task of PFC at the industrial microgrid through the charging station operator. The control signal for charging and discharging of EVs is dispatched from the IMG operator, as per the voltage and frequency levels of the industrial microgrid. The EV aggregator transmits a signal to the CSO for action. The IMG operator provides all or part of the charging power without compromising the smooth operation of the IMG. The discharging operation is commenced once a fluctuation of voltage or frequency exceeds the acceptable level.
- d)
- The EV aggregator controls and manages the IMG operation, sending a signal to the CSO to charge or discharge the vehicles immediately or according to a schedule.
- e)
- The EVs, unlike the power generating sources, should be left with adequately high SOC for the primary operation of transportation.
Objectives of V2G Control
3. Charging and Discharging Strategy of CSO
CSO Synchronization with the EV Aggregator and EVs
- Initial battery SOC,
- Desired battery SOC,
- Battery rated capacity,
- EV parking time estimation,
- Owner’s obligation of uni- or bi-directional power flow
- Vehicle converter’s power limit
- EV label for generating the bill
4. V2G Strategy for Primary Frequency Control
4.1. Impact of CSO on the V2G Strategy
4.1.1. Concept of Electric Vehicle to Grid Power (EV2G)
4.1.2. Estimation of FRC
4.1.3. Assessment of EV2G Power
4.1.4. The Correlation Between EVs and EV2G Power
4.1.5. Aggregated EV2G Power for the Charging Station
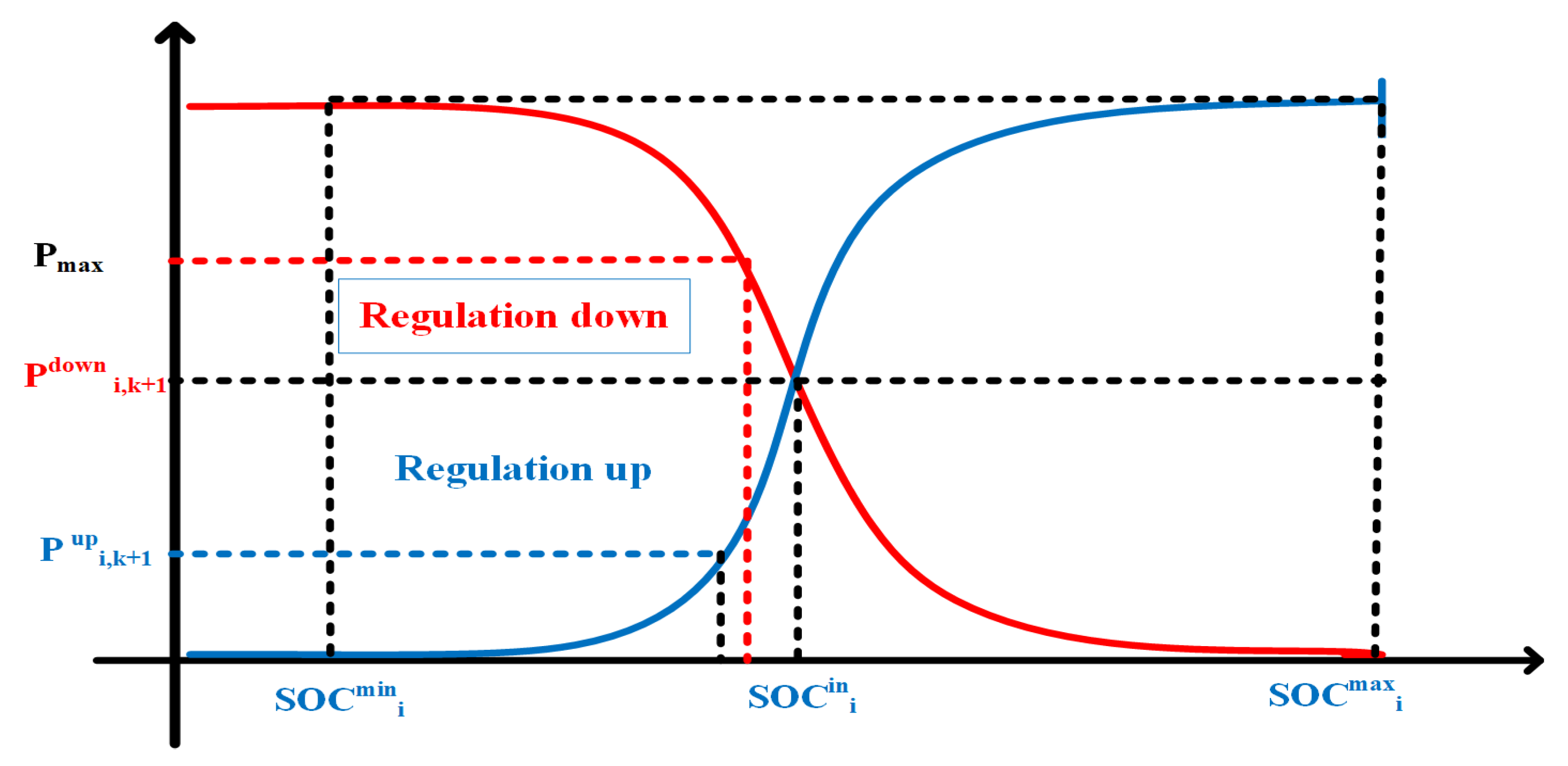
4.1.6. V2G Strategy of EV Battery SOC Levels
4.2. EV Aggregator V2G Control Strategies
4.2.1. Purpose of Frequency Regulation Capacity
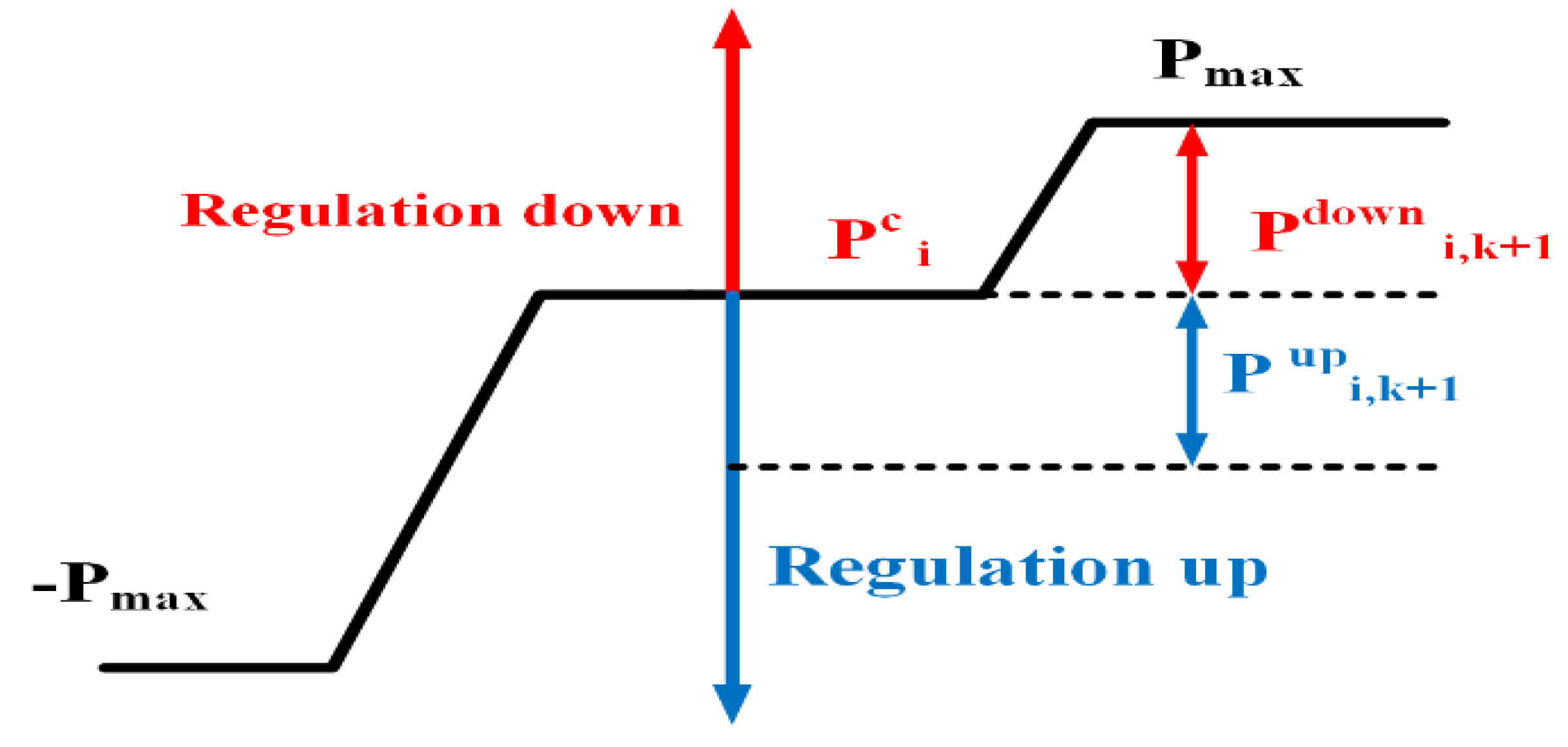
4.2.2. Total EV2G Power
4.2.3. V2G Control Framework to Eliminate the Area Control Error (ACE)
5. System Modelling and Simulation
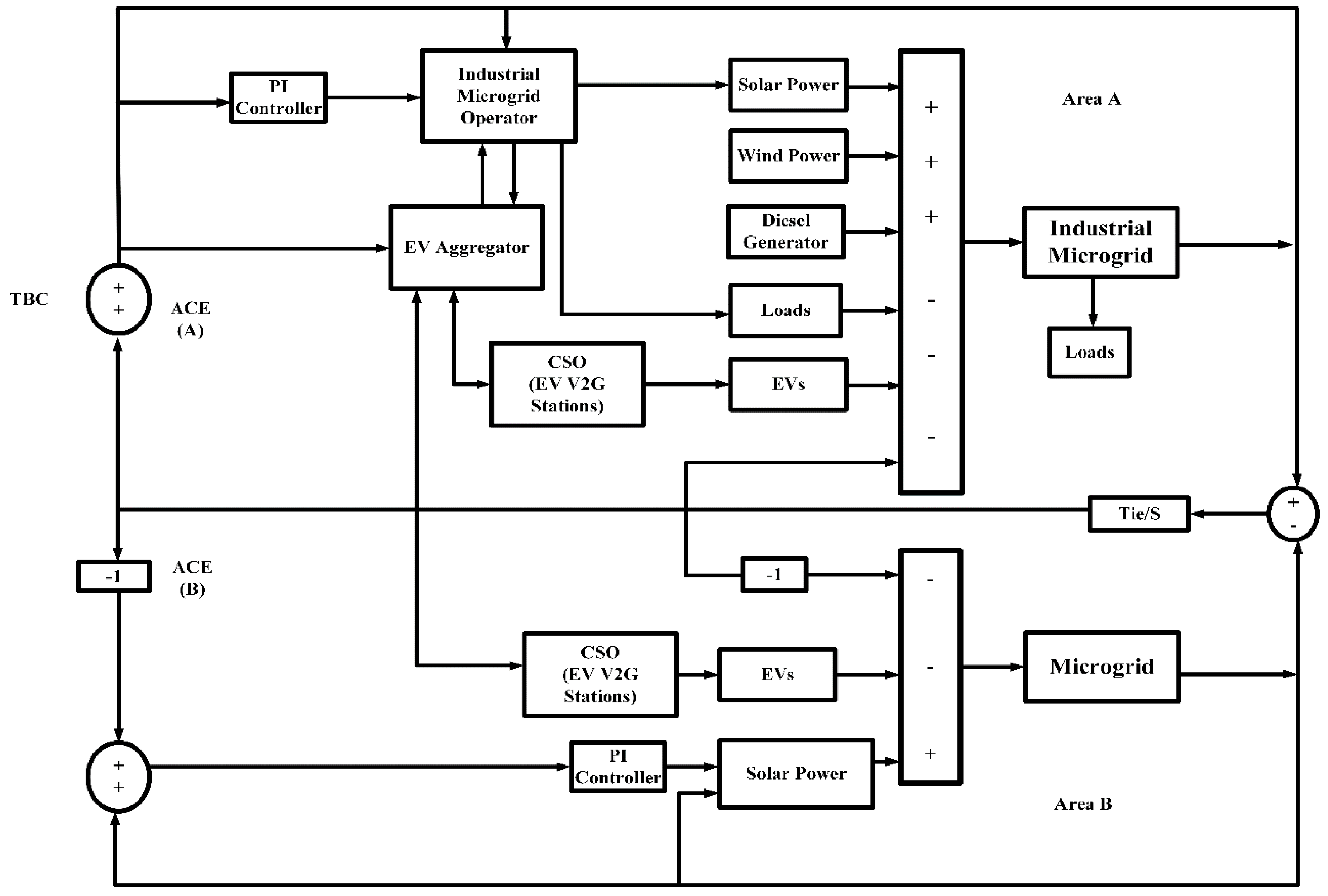
5.1. Interconnected Industrial Microgrid and Microgrid
5.2. V2G Simulation Model
6. Results and Discussions
6.1. Simulation Scenarios
6.2. Simulation Description and Different Scenarios
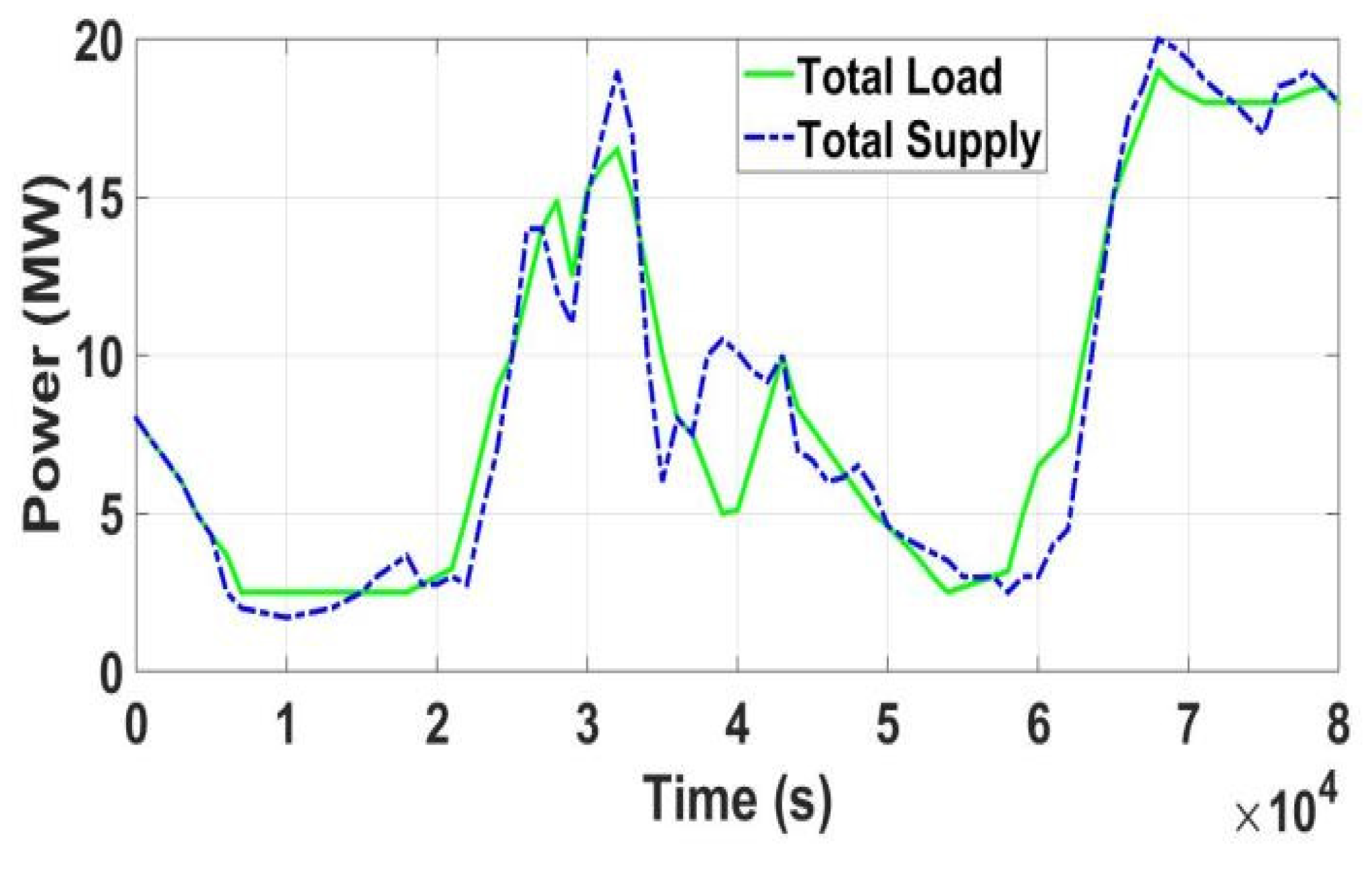
6.3. Influences of V2G on the Industrial Microgrid
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Frequency bias factor | |
| Frequency deviation | |
| Energy variation of the ith EV battery | |
| Rated capacity of the ith EV battery | |
| Maximum V2G power at the battery side of EVs | |
| V2G power at the battery side of the ith EV at time | |
| Regulation-down FRC of the jth EV charging station at time | |
| Regulation-up FRC of the jth EV charging station at time | |
| Maximum SOC of the ith EV | |
| Minimum SOC of the ith EV | |
| SOC of the ith EV battery at time . | |
| Initial SOC of the ith EV at plug-in time | |
| Up-regulation factor | |
| Down-regulation factor | |
| Number of EVs in the jth EV charging station for maintaining battery SOC levels | |
| Number of EVs in the jth EV charging station adjusting battery SOC levels. | |
| EV2G power of EVs holding battery SOC levels of the jth EV charging station at time for down-regulation | |
| EV2G power of EVs holding battery SOC levels of the jth EV charging station at time for up-regulation | |
| EV2G power of EV adjusting battery SOC levels of the jth EV charging station at time for up-regulation | |
| EV2G power of EV adjusting battery SOC levels of the jth EV charging station at time for down-regulation | |
| Regulation task of the jth EV charging station at time for maintaining battery energy | |
| Regulation task of the jth EV charging station at time for adjusting battery SOC levels | |
| Regulation task of the jth EV charging station at time | |
| V2G power at the battery side of the ith EV at time | |
| Discharging efficiency of EVs | |
| Charging efficiency of EVs |
Abbreviations
| SOC | State of charge |
| PFC | Primary frequency control |
| FRC | Frequency regulation capacity |
| ACE | Area control error |
| ARR | Area regulation requirement |
| IMGO | Industrial microgrid operator |
| CSO | Charging station operator |
| EVO | Electric vehicle operator |
| EVA | Electric vehicle aggregator |
| EVV2G | Electric vehicle-vehicle to grid |
| RER | Renewable energy resources |
| DGs | Distributed generations |
| DGRs | Distributed generations resources |
| CSS | Charging station system |
| LFC | Load frequency control |
References
- Fan, Y.V.; Perry, S.; Klemeš, J.J.; Lee, C.T. A review on air emissions assessment: Transportation. J. Clean. Prod. 2018, 194, 673–684. [Google Scholar] [CrossRef]
- Nykvist, B.; Sprei, F.; Nilsson, M. Assessing the progress toward lower priced long range battery electric vehicles. Energy Policy 2019, 124, 144–155. [Google Scholar] [CrossRef]
- Li, H.; Eseye, A.T.; Zhang, J.; Zheng, D. Optimal energy management for industrial microgrids with high-penetration renewables. Prot. Control Mod. Power Syst. 2017, 2, 12. [Google Scholar] [CrossRef]
- Li, Y.; Feng, B.; Li, G.; Qi, J.; Zhao, D.; Mu, Y. Optimal distributed generation planning in active distribution networks considering integration of energy storage. Appl. Energy 2018, 210, 1073–1081. [Google Scholar] [CrossRef]
- Liu, H.; Hu, Z.; Song, Y.; Wang, J.; Xie, X. Vehicle-to-grid control for supplementary frequency regulation considering charging demands. IEEE Trans. Power Syst. 2014, 30, 3110–3119. [Google Scholar] [CrossRef]
- Bayati, M.; Abedi, M.; Gharehpetian, G.B.; Farahmandrad, M. Short-term interaction between electric vehicles and microgrid in decentralized vehicle-to-grid control methods. Prot. Control Mod. Power Syst. 2019, 4, 1–11. [Google Scholar] [CrossRef]
- Shafie-khah, M.; Siano, P.; Aghaei, J.; Masoum, M.A.; Li, F.; Catalão, J.P. Comprehensive review of the recent advances in industrial and commercial DR. IEEE Trans. Power Syst. 2019, 15, 3757–3771. [Google Scholar] [CrossRef]
- Rizvi, S.A.A.; Xin, A.; Masood, A.; Iqbal, S.; Jan, M.U.; Rehman, H. Electric Vehicles and their Impacts on Integration into Power Grid: A Review. In Proceedings of the 2nd IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018; pp. 1–6. [Google Scholar]
- Liu, H.; Huang, K.; Wang, N.; Qi, J.; Wu, Q.; Ma, S.; Li, C. Optimal dispatch for participation of electric vehicles in frequency regulation based on area control error and area regulation requirement. Appl. Energy 2019, 240, 46–55. [Google Scholar] [CrossRef]
- Meng, J.; Mu, Y.; Jia, H.; Wu, J.; Yu, X.; Qu, B. Dynamic frequency response from electric vehicles considering travelling behavior in the Great Britain power system. Appl. Energy 2016, 162, 966–979. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, Y.; Li, C.; Li, C.-Y. Real-time adjustment of load frequency control based on controllable energy of electric vehicles. Trans. Inst. Meas. Control 2020, 42, 42–54. [Google Scholar] [CrossRef]
- Shakerighadi, B.; Anvari-Moghaddam, A.; Ebrahimzadeh, E.; Blaabjerg, F.; Bak, C.L. A hierarchical game theoretical approach for energy management of electric vehicles and charging stations in smart grids. IEEE Access 2018, 6, 67223–67234. [Google Scholar] [CrossRef]
- Bevrani, H.; Shokoohi, S. An intelligent droop control for simultaneous voltage and frequency regulation in islanded microgrids. IEEE Trans. Smart Grid 2013, 4, 1505–1513. [Google Scholar] [CrossRef]
- Iqbal, S.; Xin, A.; Jan, M.U.; Ur Rehman, H.; Masood, A.; Rizvi, S.A.A.; Salman, S. Aggregated Electric Vehicle-to-Grid for Primary Frequency Control in a Microgrid-A Review. In Proceedings of the IEEE 2nd International Electrical and Energy Conference (CIEEC), Beijing, China, 4–7 November 2018; pp. 563–568. [Google Scholar]
- Liu, H.; Qi, J.; Wang, J.; Li, P.; Li, C.; Wei, H. EV dispatch control for supplementary frequency regulation considering the expectation of EV owners. IEEE Trans. Smart Grid 2016, 9, 3763–3772. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Q.; Li, C.; Li, C. Real-Time Adjustment of Load Frequency Control Based on Controllable Energy of Electric Vehicles. In Advances in Green Energy Systems and Smart Grid; Springer: Berlin/Heidelberg, Germany, 2018; pp. 105–115. [Google Scholar]
- Habib, S.; Kamran, M.; Rashid, U. Impact analysis of vehicle-to-grid technology and charging strategies of electric vehicles on distribution networks–a review. J. Power Sources 2015, 277, 205–214. [Google Scholar] [CrossRef]
- Liu, H.; Yang, Y.; Qi, J.; Li, J.; Wei, H.; Li, P. Frequency droop control with scheduled charging of electric vehicles. IET Gener. Transm. Distrib. 2017, 11, 649–656. [Google Scholar] [CrossRef]
- Zhu, X.; Xia, M.; Chiang, H.-D. Coordinated sectional droop charging control for EV aggregator enhancing frequency stability of microgrid with high penetration of renewable energy sources. Appl. Energy 2018, 210, 936–943. [Google Scholar] [CrossRef]
- Kafle, L.; Ni, Z.; Tonkoski, R.; Qiao, Q. Frequency control of isolated micro-grid using a droop control approach. In Proceedings of the IEEE International Conference on Electro Information Technology (EIT), Grand Forks, ND, USA, 19–21 May 2016; pp. 0771–0775. [Google Scholar]
- Kaur, K.; Singh, M.; Kumar, N. Multiobjective optimization for frequency support using electric vehicles: An aggregator-based hierarchical control mechanism. IEEE Syst. J. 2017, 13, 771–782. [Google Scholar] [CrossRef]
- Karfopoulos, E.L.; Panourgias, K.A.; Hatziargyriou, N.D. Distributed coordination of electric vehicles providing V2G regulation services. IEEE Trans. Power Syst. 2015, 31, 2834–2846. [Google Scholar] [CrossRef]
- Zhang, W.; Srinivasan, D.; Sharma, A. Comment on “Distributed Coordination of Electric Vehicles providing v2g Regulation Services” by el Karfopoulos, Ka Panourgias, N and D. hatziargyriou. In Proceedings of the IEEE Innovative Smart Grid Technologies-Asia (Isgt Asia), Singapore, 22–25 May 2018; pp. 456–458. [Google Scholar]
- Su, S.; Hu, Y.; Wang, S.; Wang, W.; Ota, Y.; Yamashita, K.; Xia, M.; Nie, X.; Chen, L.; Mao, X. Reactive power compensation using electric vehicles considering drivers’ reasons. IET Gener. Transm. Distrib. 2018, 12, 4407–4418. [Google Scholar] [CrossRef]
- Safari, A.; Babaei, F.; Farrokhifar, M. A load frequency control using a PSO-based ANN for micro-grids in the presence of electric vehicles. Int. J. Ambient Energy 2019, 1–13. [Google Scholar] [CrossRef]
- Chhaya, L.; Sharma, P.; Bhagwatikar, G.; Kumar, A. Wireless sensor network based smart grid communications: Cyber attacks, intrusion detection system and topology control. Electronics 2017, 6, 5. [Google Scholar] [CrossRef]
- Khooban, M.-H.; Niknam, T.; Shasadeghi, M.; Dragicevic, T.; Blaabjerg, F. Load frequency control in microgrids based on a stochastic noninteger controller. IEEE Trans. Sustain. Energy 2017, 9, 853–861. [Google Scholar] [CrossRef]
- Khooban, M.H.; Gheisarnejad, M. A Novel Deep Reinforcement Learning Controller Based Type-II Fuzzy System: Frequency Regulation in Microgrids. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 1–11. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No | Term | Range | |
|---|---|---|---|
| 1 | Minimal frequency | ||
| 2 | Minimal voltage | ||
| 3 | Frequency above minimal | Charging Reference | |
| 4 | Frequency over above minimal | ||
| 5 | Voltage above minimal | ||
| 6 | Voltage over above minimal | ||
| 7 | Frequency below minimal | Discharging Reference | |
| 8 | Frequency over below minimal | ||
| 9 | Voltage below minimal | ||
| 10 | Voltage over below minimal | ||
| 11 | |||
| Important Parameters | Area A | Area B |
|---|---|---|
| Proportional gain | 1 | 1 |
| Integral gain | 0.01 | 0.01 |
| Time constant for load frequency control (LFC) (s) | 4 | 4 |
| Frequency bias factor (KW/01Hz) | 340 | |
| Inertia constant (KW. s) | 16320 | 54720 |
| Load damping coefficient (MW/Hz) | 2040 | 6840 |
| Dead band of PFC (Hz) | 0.033 | |
| Communication delay (s) | 1 | 1 |
| Dead band (DB) of area control error (ACE) (KW) | 20 | 20 |
| Time constant for wind fluctuation (s) | 1 | 1 |
| Parameters | Charging Station (CS-1) | Charging Station (CS-2) | ||
|---|---|---|---|---|
| EV type-1 | EV type-2 | EV type-1 | EV type-2 | |
| Number of EVs | 150 | 100 | 170 | 80 |
| The number of EV aggregators | 2 | |||
| Dispatching cycle (s) | 4 | |||
| Communication delay (s) | 1 | |||
| Charging/discharging efficiency | 0.92/0.92 | |||
| Plug in time (s) | Time~N (3600) | |||
| Plug out time (s) | Time~N (7200) | |||
| Initial SOC at the plug-in time (pu) | SOC~N (0.4, 0.1) | |||
| Expected SOC at the plug out time (pu) | SOC [0.2,05] SOC~N (0.7, 0.1) | |||
| Battery capacity (kwh) | 16 | |||
| Maximum V2G power (KW) | 7 | |||
| Maximum/minimum SOC limitation (pu) | 0.98/02 | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iqbal, S.; Xin, A.; Jan, M.U.; Salman, S.; Zaki, A.u.M.; Rehman, H.U.; Shinwari, M.F.; Abdelbaky, M.A. V2G Strategy for Primary Frequency Control of an Industrial Microgrid Considering the Charging Station Operator. Electronics 2020, 9, 549. https://doi.org/10.3390/electronics9040549
Iqbal S, Xin A, Jan MU, Salman S, Zaki AuM, Rehman HU, Shinwari MF, Abdelbaky MA. V2G Strategy for Primary Frequency Control of an Industrial Microgrid Considering the Charging Station Operator. Electronics. 2020; 9(4):549. https://doi.org/10.3390/electronics9040549
Chicago/Turabian StyleIqbal, Sheeraz, Ai Xin, Mishkat Ullah Jan, Salman Salman, Atta ul Munim Zaki, Haseeb Ur Rehman, Muhammad Fahad Shinwari, and Mohamed Abdelkarim Abdelbaky. 2020. "V2G Strategy for Primary Frequency Control of an Industrial Microgrid Considering the Charging Station Operator" Electronics 9, no. 4: 549. https://doi.org/10.3390/electronics9040549
APA StyleIqbal, S., Xin, A., Jan, M. U., Salman, S., Zaki, A. u. M., Rehman, H. U., Shinwari, M. F., & Abdelbaky, M. A. (2020). V2G Strategy for Primary Frequency Control of an Industrial Microgrid Considering the Charging Station Operator. Electronics, 9(4), 549. https://doi.org/10.3390/electronics9040549