A Novel Changing Athlete Body Real-Time Visual Tracking Algorithm Based on Distractor-Aware SiamRPN and HOG-SVM



Abstract
1. Introduction
2. Related Work
3. Proposed Tracking Based on Distractor-Aware SiamRPN and HOG-SVM
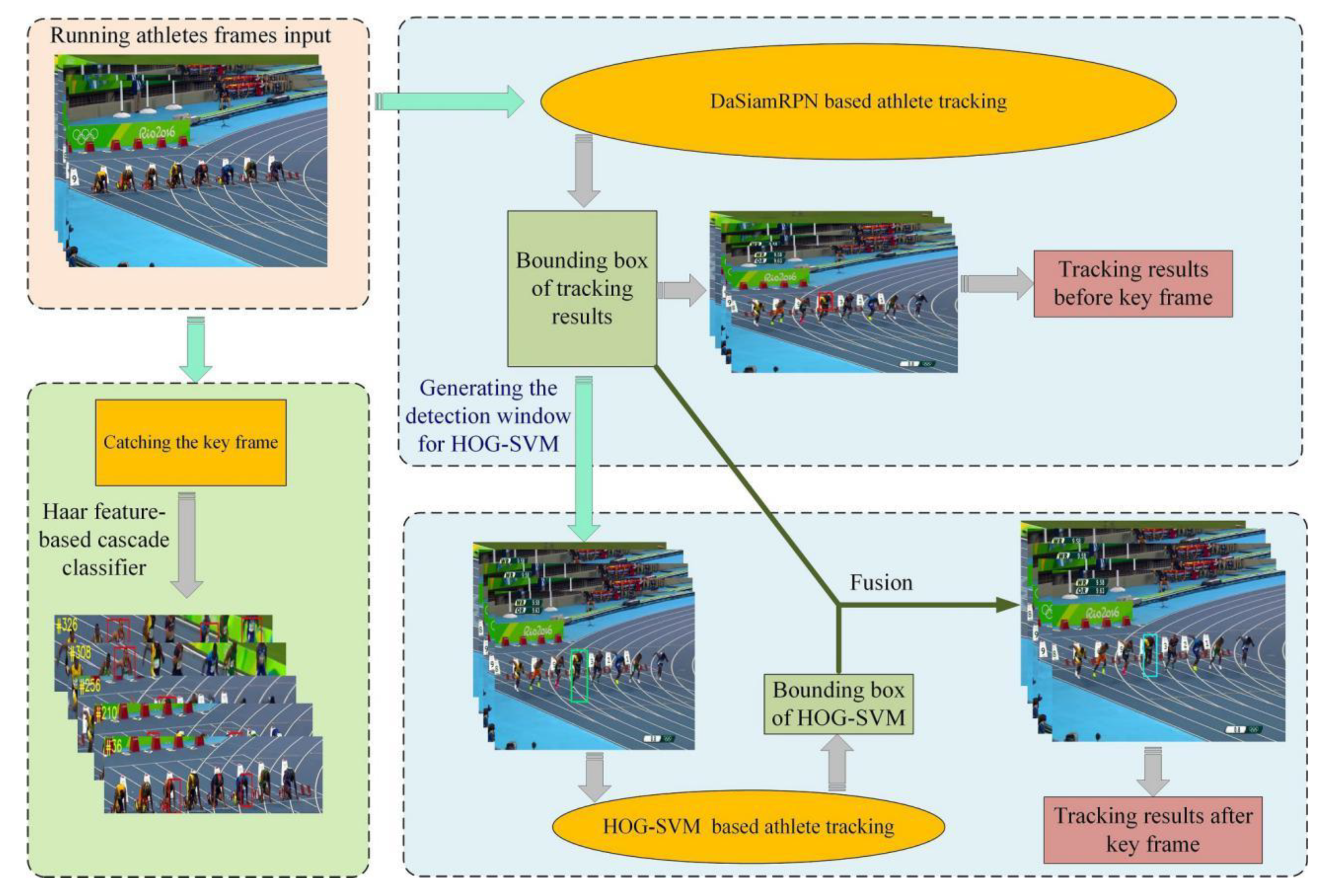
3.1. Proposed Tracking Algorithm Structure
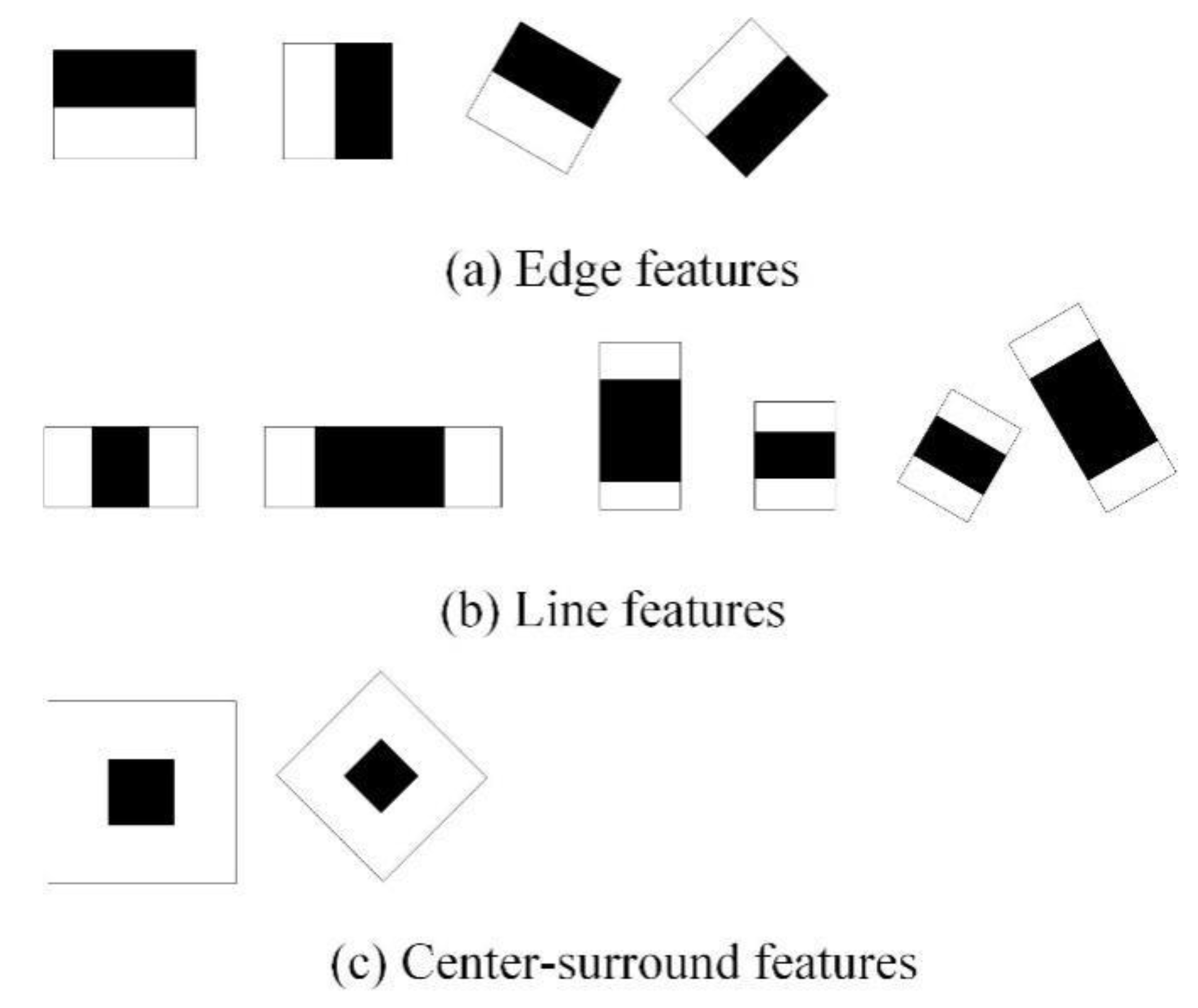
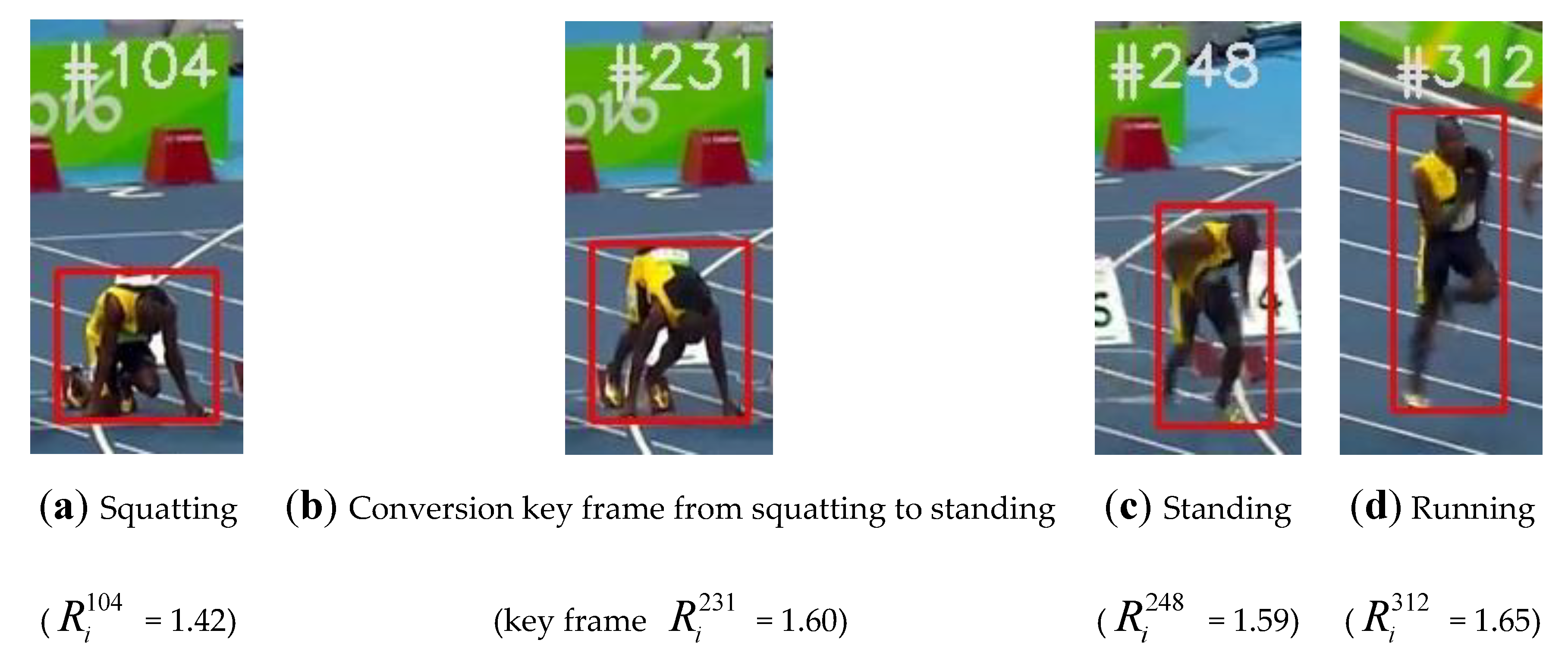
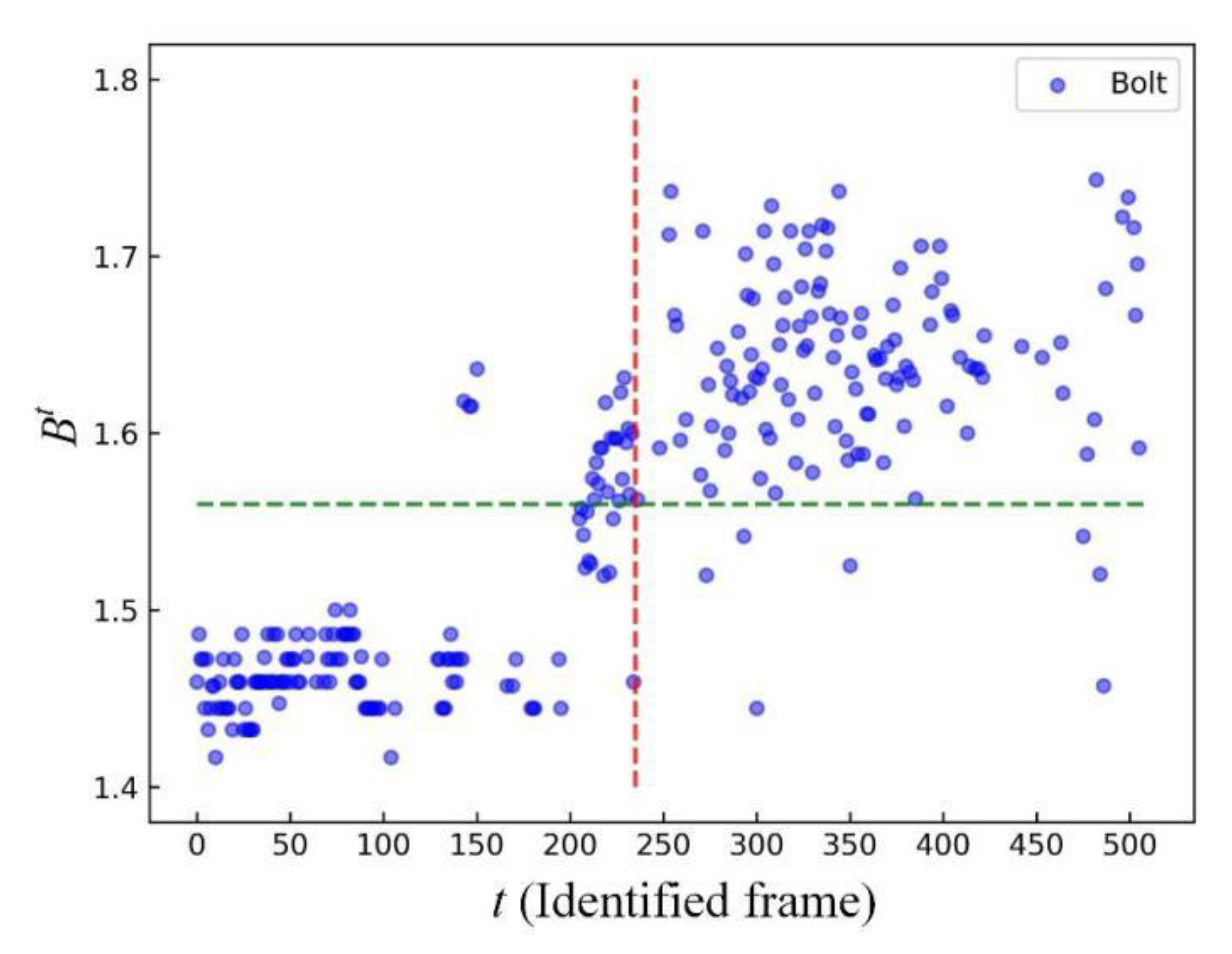
3.2. Haar Feature-Based Cascade Classifier for Catching the Convert Key Frame
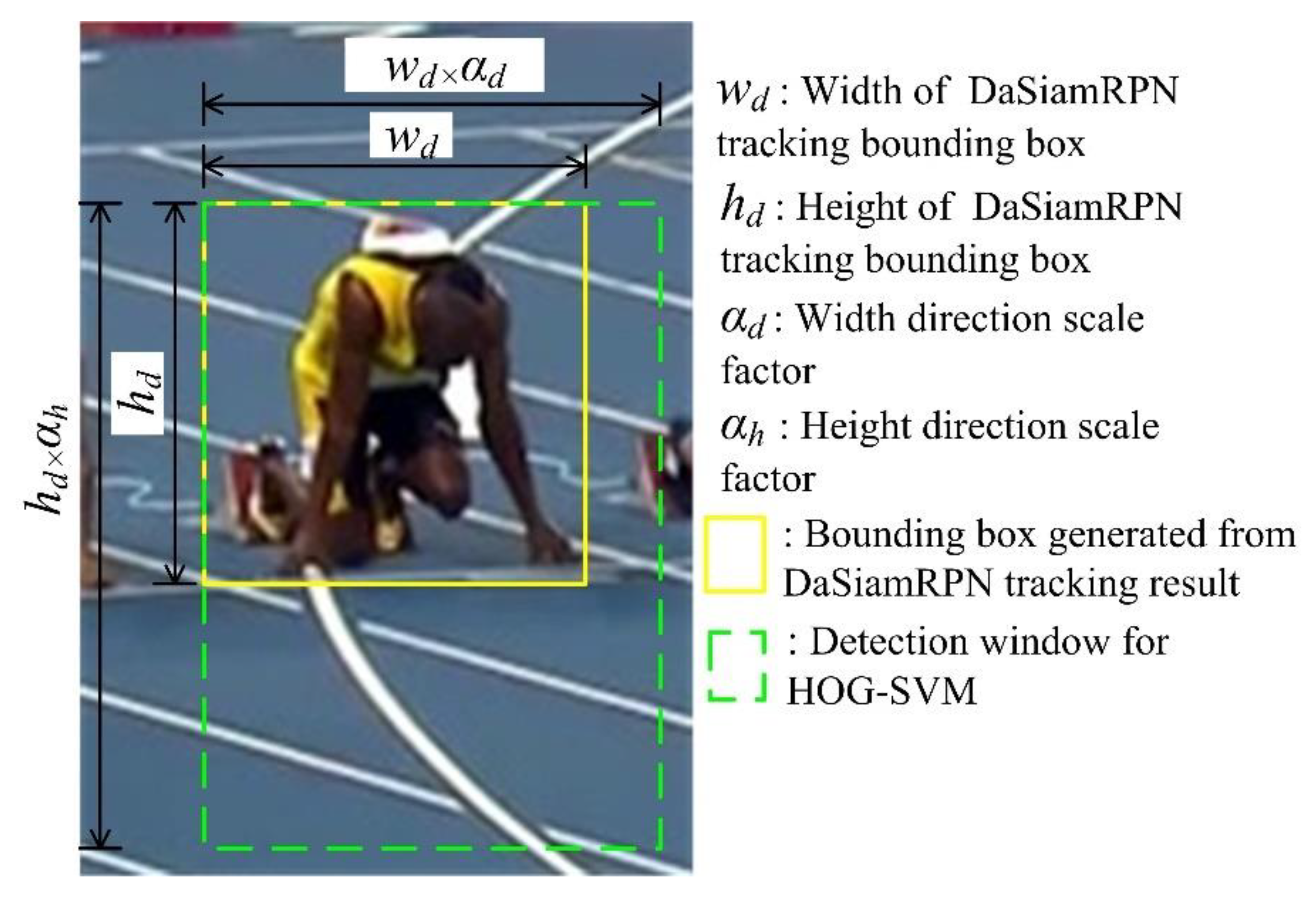
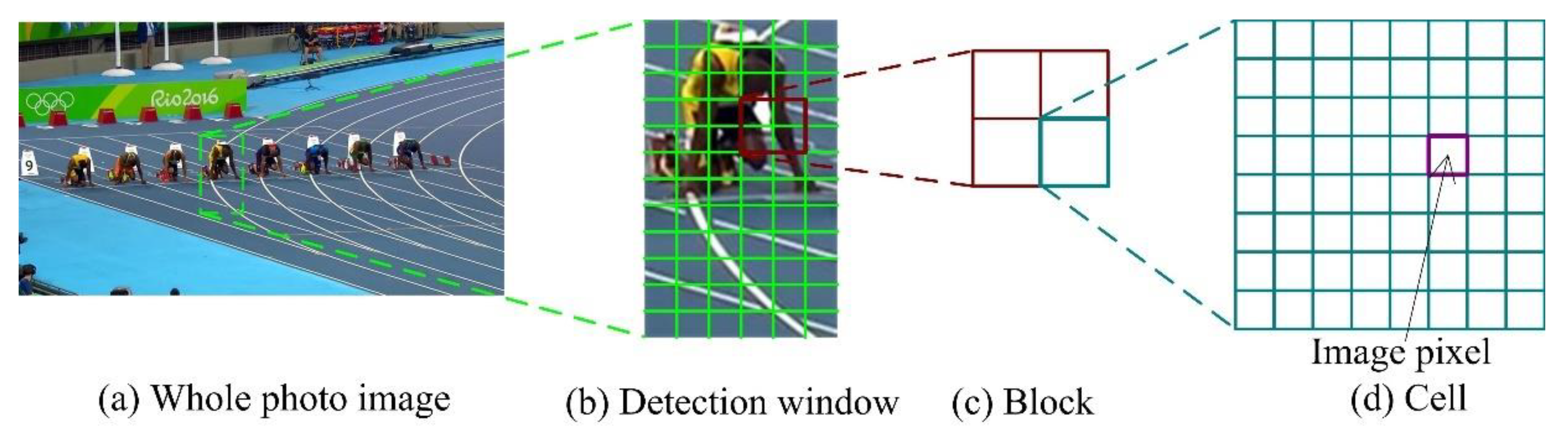
3.3. DaSiamRPN-Based HOG-SVM Tracker
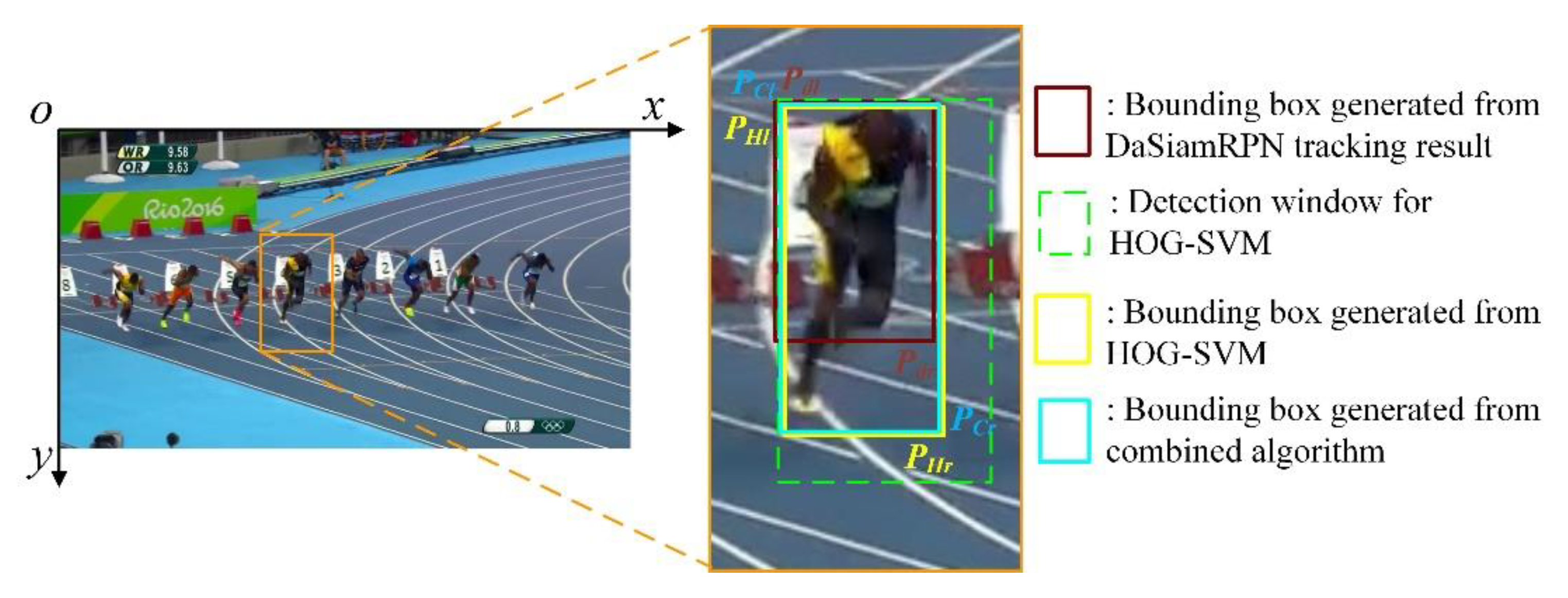
3.4. Proposed Tracking Algorithm Based on the Combination of DaSiamRPN and HOG-SVM
| Algorithm 1. Athlete tracking with body dramatic change. | |
| Input: , video sequence frames | |
| Output: , final tracking result sequence to frame t | |
| 1: | Initialization: t = 0, key_frame_state = 0, input an initial bounding box of the athlete |
| 2: | fort = 0 to n do |
| 3: | Track the athlete in sequence Nt using DaSiamRPN |
| 4: | Predict a tracking result with a bounding box |
| 5: | (top left corner point , bottom right corner point ) |
| 6: | Detect athletes in sequence Nt utilizing the Haar feature-based cascade classifier |
| 7: | Compute and Bt as Equation (1), (2) |
| 8: | if continuous k frames with Bt > β then //means the key frame is found |
| 9: | return key_frame_state = 1 //change to another tracking mode |
| 10: | else |
| 11: | return key_frame_state = 0 //no key frame is found |
| 12: | end if |
| 13: | if key_frame_state = 1 then //the key frame is found |
| 14: | Generate a detection window = |
| 15: | = HOG-SVM() |
| 16: | (top left corner point , bottom right corner point ) |
| 17: | Fusion of and as Equation (3), (4), (5), , |
| 18: | |
| 19: | return the final result bounding box |
| 20: | else |
| 21: | The bounding box is utilized as the final tracking result |
| 22: | return the final result bounding box |
| 23: | end if |
| 24: | end for //reach the end of the video sequence |
4. Experiments and Analysis
4.1. Experimental Setup
4.2. Search Results of the Key Frame
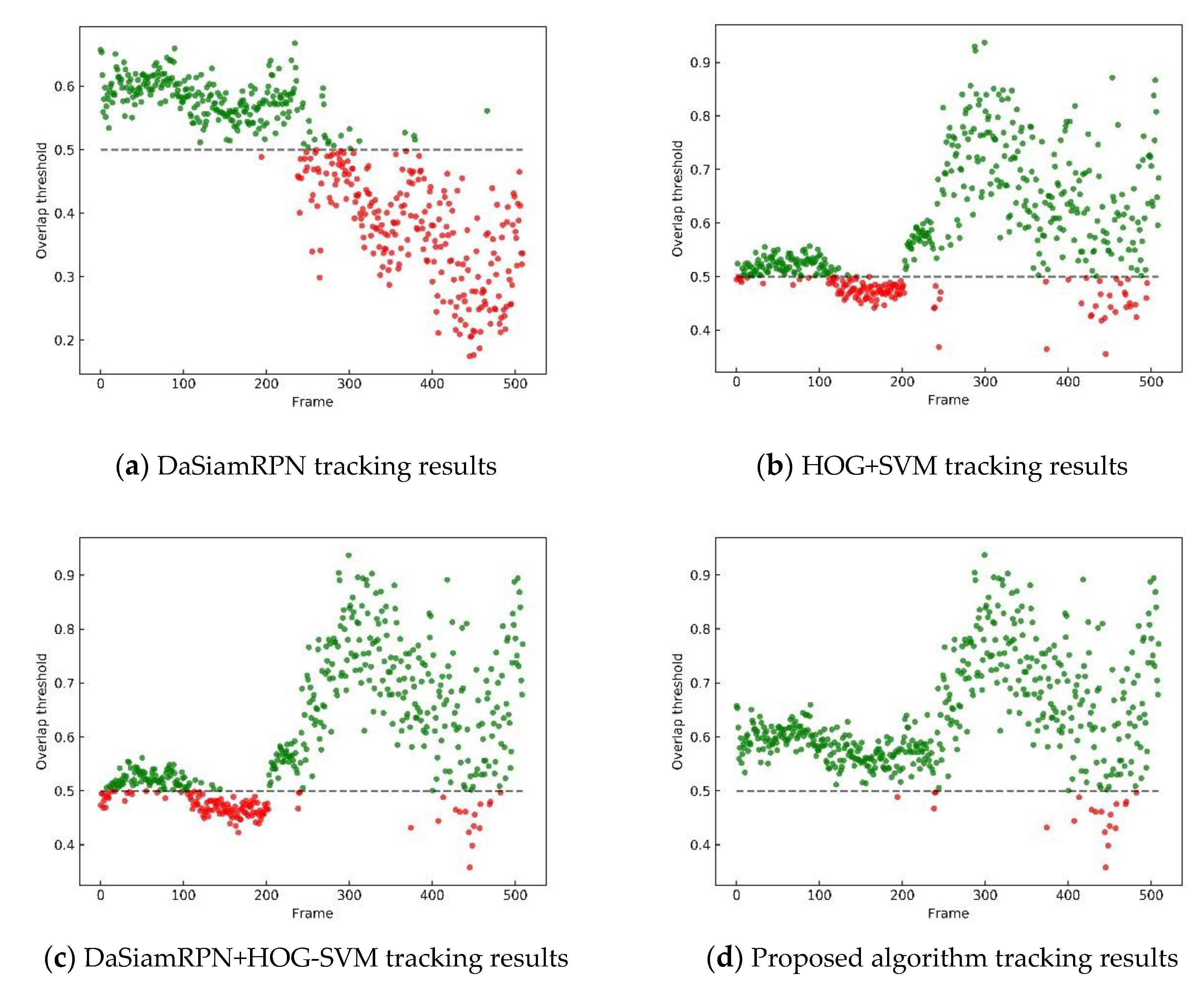
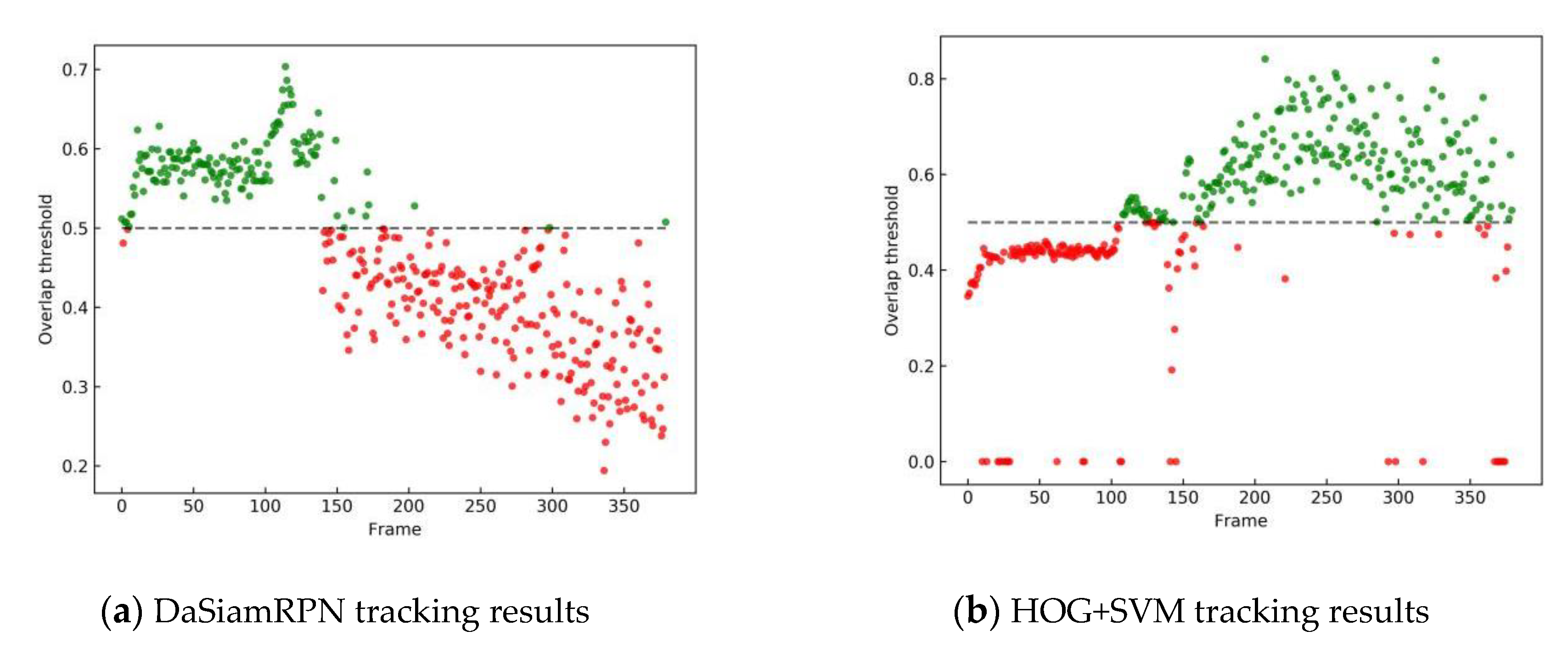
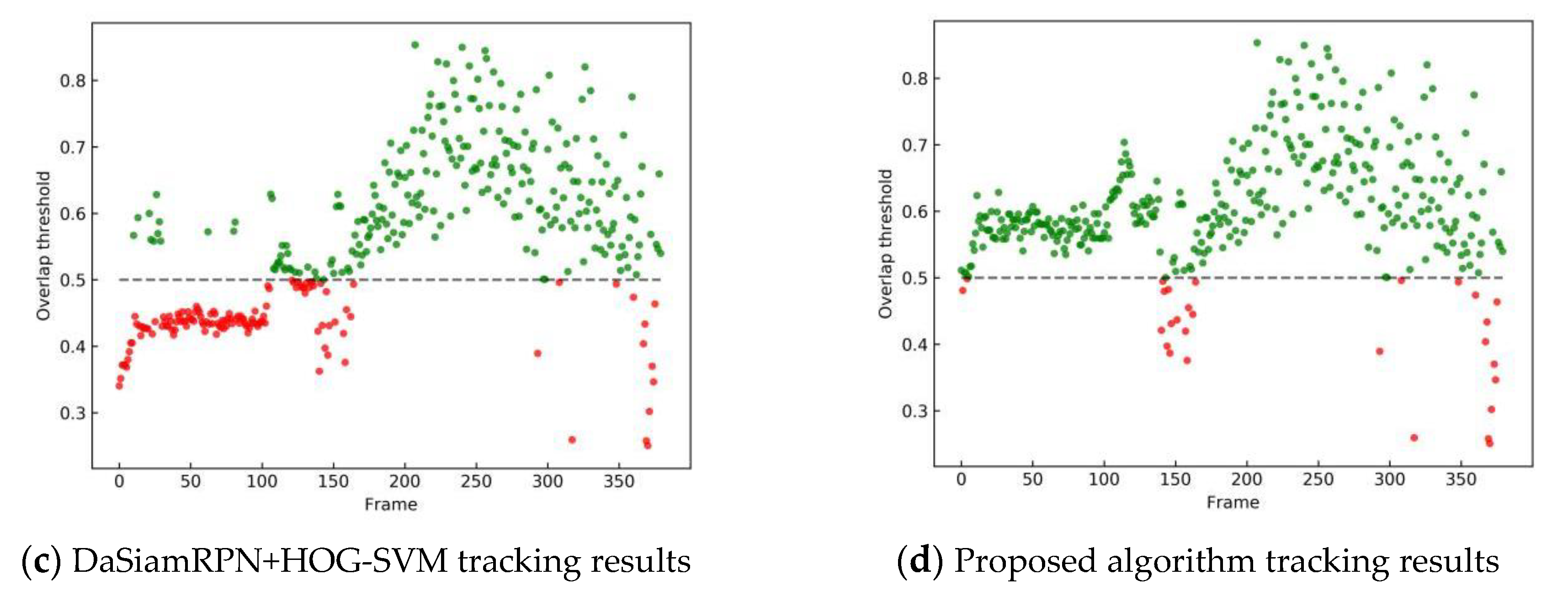
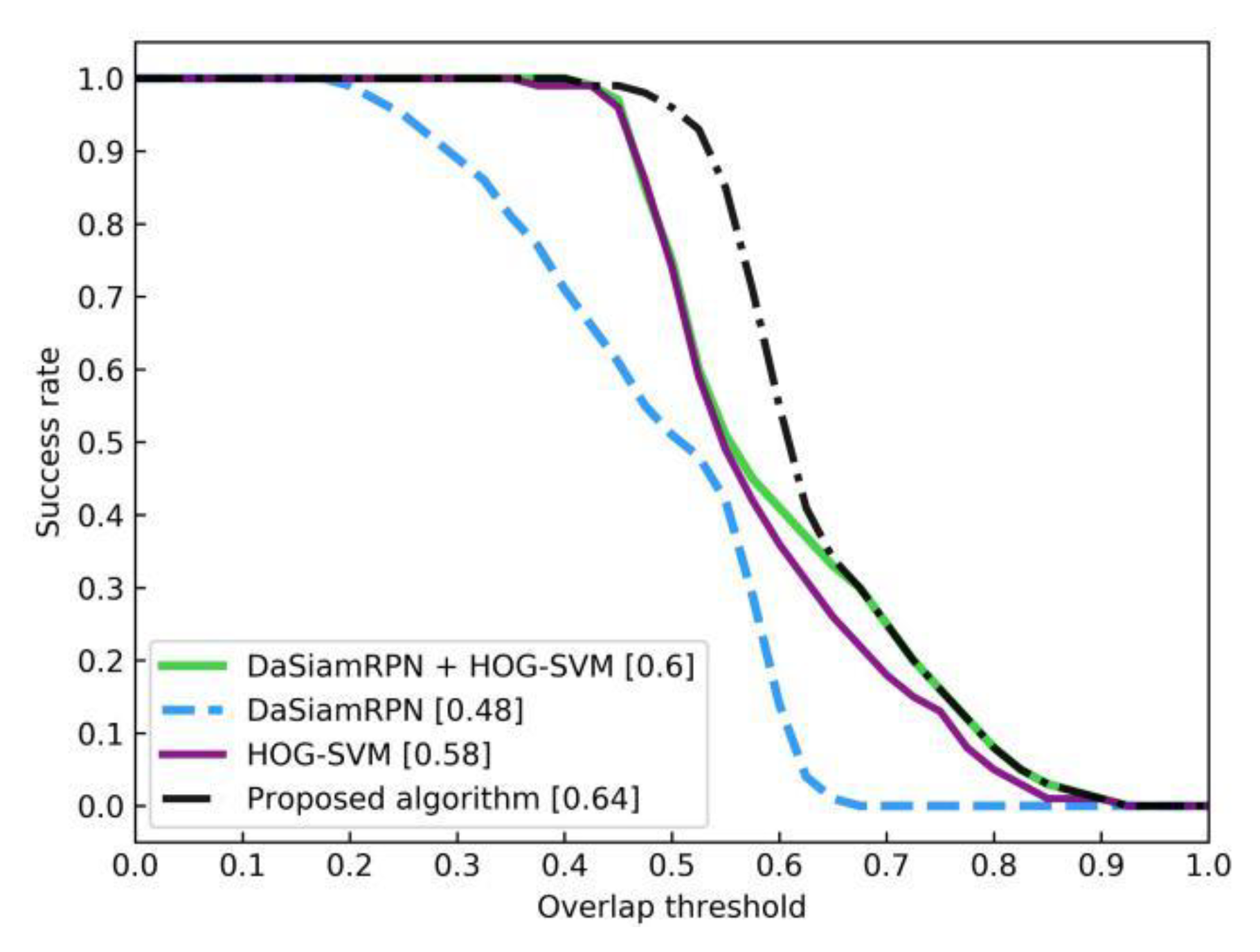
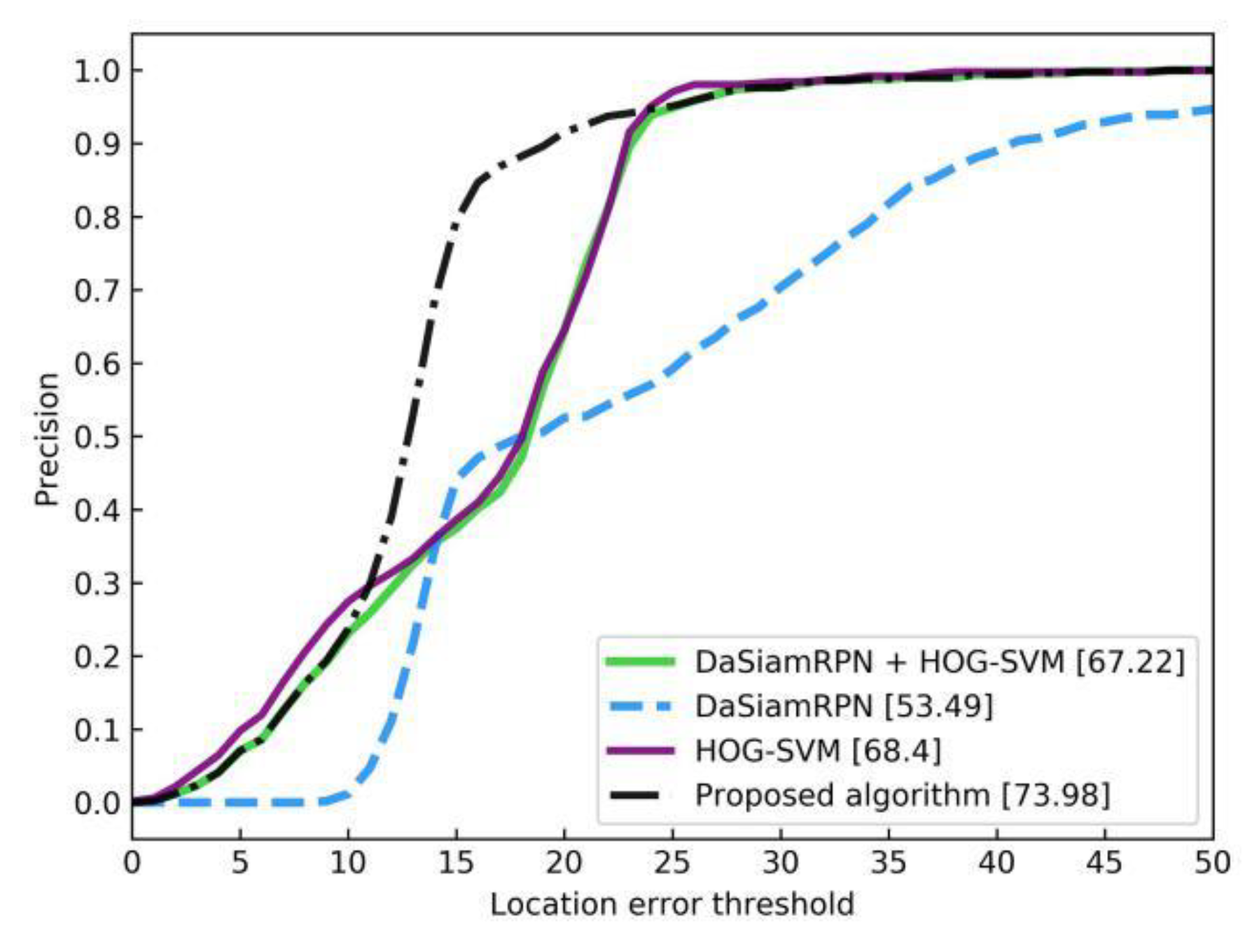
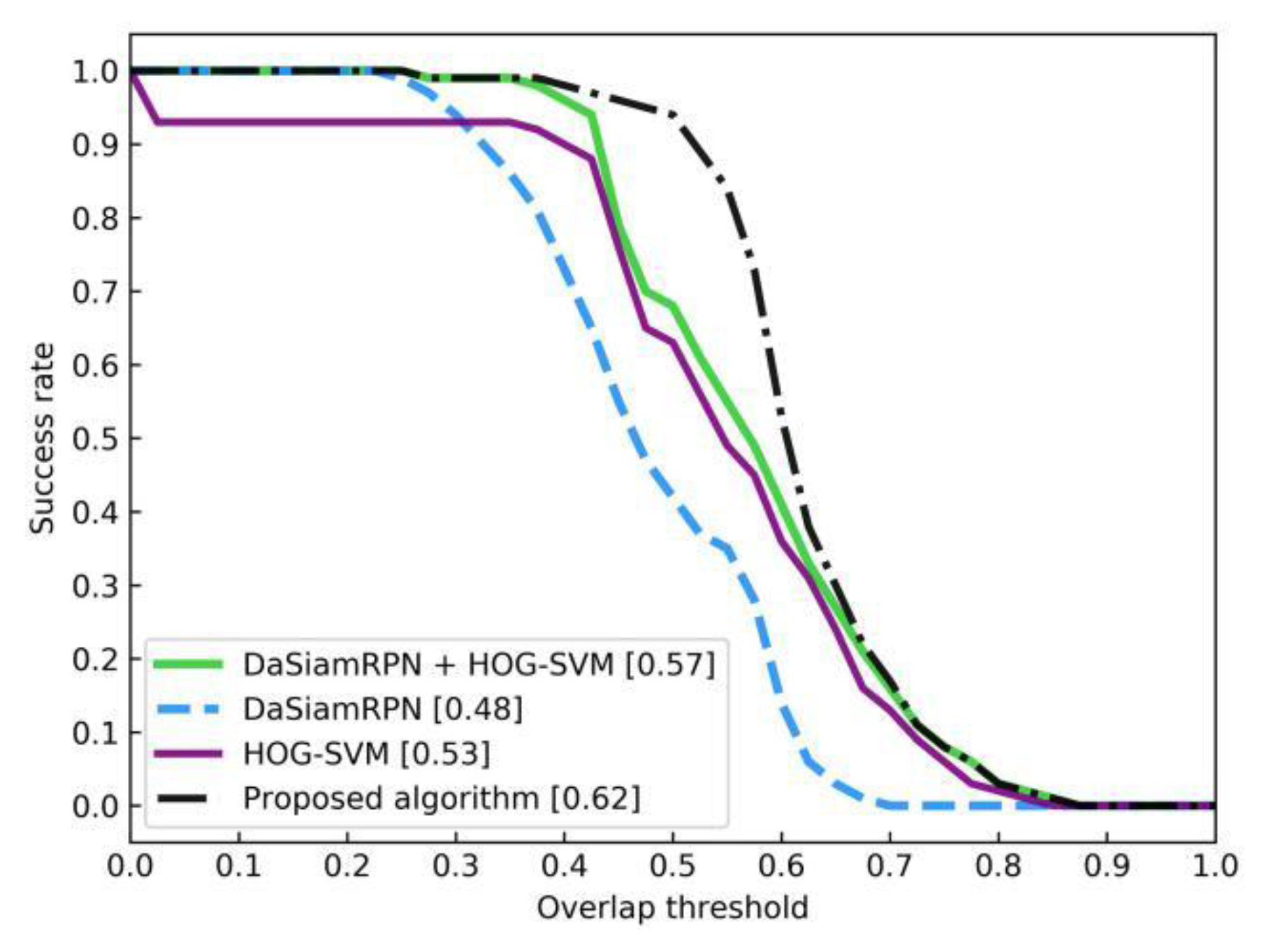
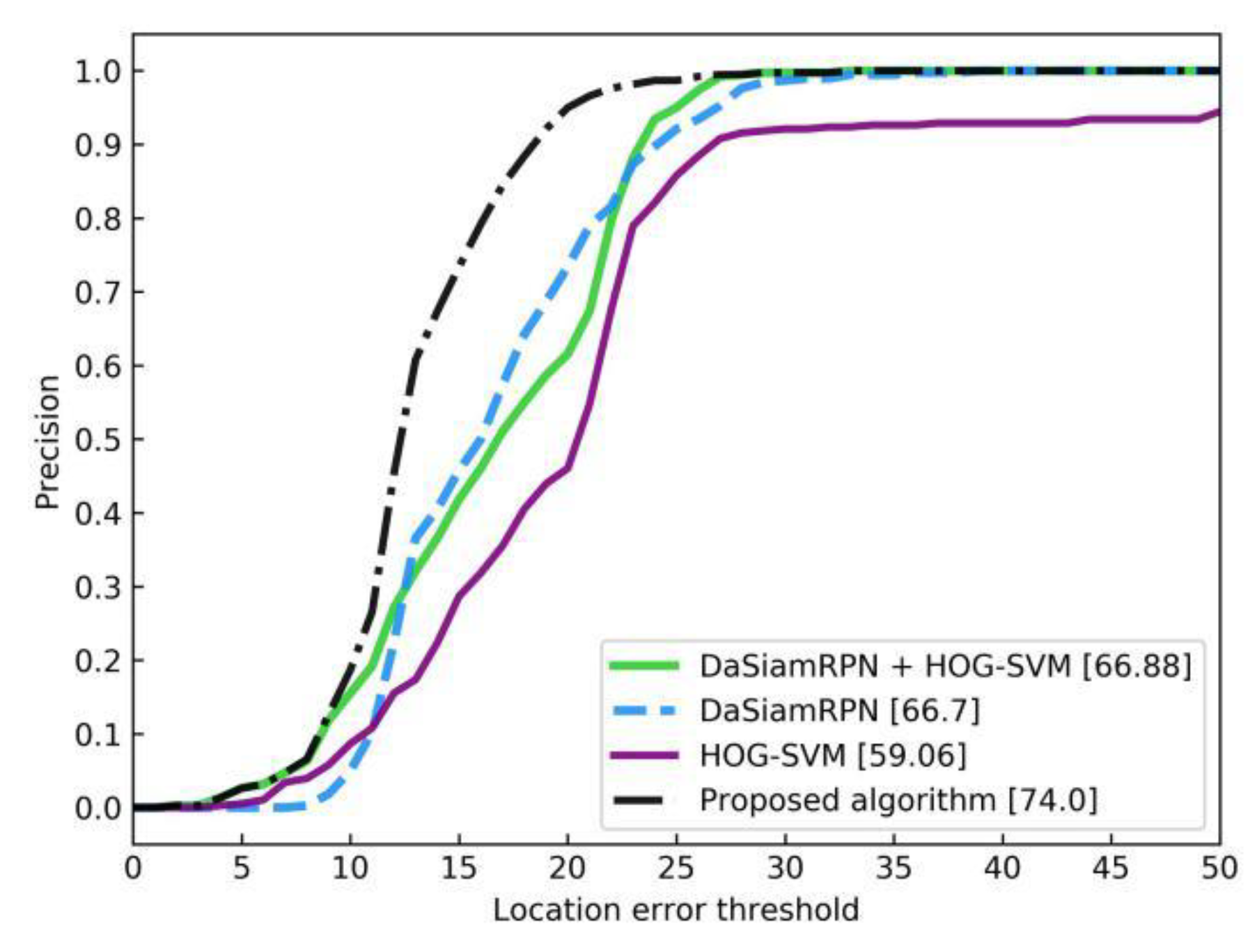
4.3. Performance Evaluation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, D.; Fang, W.; Chen, W.; Sun, T. Model Update Strategies about Object Tracking, A State of the Art Review. Electronics 2019, 8, 1207. [Google Scholar] [CrossRef]
- Rahmaniar, W.; Wang, W.; Chen, H. Real-Time Detection and Recognition of Multiple Moving Objects for Aerial Surveillance. Electronics 2019, 8, 1373. [Google Scholar] [CrossRef]
- Ghasemzadeh, H.; Jafari, R. Coordination analysis of human movements with body sensor networks: A signal processing model to evaluate baseball swings. IEEE Sens. J. 2010, 11, 603–610. [Google Scholar] [CrossRef]
- Le Nost, C.; Lefevre, F.; Bombardier, V. Automatic video editing: Original tracking method applied to basketball players in video sequences. In Proceedings of the International Conference on Image and Signal Processing, Cherbourg, France, 2–4 July 2018; pp. 117–126. [Google Scholar]
- Santhosh, P.K.; Kaarthick, B. An Automated Player Detection and Tracking in Basketball Game. CMC-Comput. Mater. Contin. 2019, 58, 625–639. [Google Scholar]
- Hu, M.C.; Chang, M.H.; Wu, J.L. Robust camera calibration and player tracking in broadcast basketball video. IEEE Trans. Multimed. 2010, 13, 266–279. [Google Scholar] [CrossRef]
- Manafifard, M.; Ebadi, H.; Moghaddam, H.A. A survey on player tracking in soccer videos. Comput. Vis. Image Underst. 2017, 159, 19–46. [Google Scholar] [CrossRef]
- Baysal, S.; Duygulu, P. Sentioscope: A soccer player tracking system using model field particles. IEEE Trans. Circuits Syst. Video Technol. 2015, 26, 1350–1362. [Google Scholar] [CrossRef]
- Herrmann, M.; Hoernig, M.; Radig, B. Online multi-player tracking in monocular soccer videos. Aasri Procedia 2014, 8, 30–37. [Google Scholar] [CrossRef]
- Gomez, G.; López, P.H.; Link, D. Tracking of ball and players in beach volleyball videos. PLoS ONE 2014, 9, e111730. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Lim, J.; Yang, M.H. Object tracking benchmark. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1834–1848. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Wu, W.; Zou, W. End-to-end flow correlation tracking with spatial-temporal attention. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 548–557. [Google Scholar]
- Lee, K.H.; Hwang, J.N. On-road pedestrian tracking across multiple driving recorders. IEEE Trans. Multimed. 2015, 17, 1429–1438. [Google Scholar] [CrossRef]
- Tang, S.; Andriluka, M.; Andres, B.; Schiele, B. Multiple people tracking by lifted multicut and person re-identification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 3701–3710. [Google Scholar]
- Zhu, Z.; Huang, G.; Zou, W.; Du, D.; Huang, C. Uct: Learning unified convolutional networks for real-time visual tracking. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 1973–1982. [Google Scholar]
- Held, D.; Thrun, S.; Savarese, S. Learning to track at 100 fps with deep regression networks. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 749–765. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P. High-Speed Tracking with Kernelized Correlation Filters. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 583–596. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Zhu, J. A Scale Adaptive Kernel Correlation Filter Tracker with Feature Integration. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 254–265. [Google Scholar]
- Hong, Z.; Chen, Z.; Wang, C. MUlti-Store Tracker (MUSTer): A cognitive psychology inspired approach to object tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 749–758. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Henriques, J.F. Fully-convolutional siamese networks for object tracking. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 850–865. [Google Scholar]
- Valmadre, J.; Bertinetto, L.; Henriques, J. End-to-end representation learning for correlation filter-based tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2805–2813. [Google Scholar]
- Tao, R.; Gavves, E.; Smeulders, A.W.M. Siamese instance search for tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 27–30 June 2016; pp. 1420–1429. [Google Scholar]
- Danelljan, M.; Bhat, G.; Khan, F.S.; Felsberg, M. Eco: Efficient convolution operators for tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6638–6646. [Google Scholar]
- Danelljan, M.; Robinson, A.; Khan, F.S.; Felsberg, M. Beyond correlation filters: Learning continuous convolution operators for visual tracking. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 472–488. [Google Scholar]
- Liu, F.; Gong, C.; Huang, X. Robust Visual Tracking Revisited: From Correlation Filter to Template Matching. IEEE Trans. Imag Process. 2018, 27, 2777–2790. [Google Scholar] [CrossRef] [PubMed]
- Kristan, M.; Leonardis, A.; Matas, J.; Felsberg, M.; Pflugfelder, R.; Cehovin Zajc, L.; Vojir, T.; Hager, G.; Lukezic, A.; Eldesokey, A.; et al. The Visual Object Tracking VOT2017 Challenge Results. In Proceedings of the 2017 IEEE International Conference on Computer Vision, Venezsia, Italy, 22–29 October 2017; pp. 1949–1972. [Google Scholar]
- Yadav, P.; Senthamilarasu, V.; Kutty, K.; Ugale, S.P. Implementation of Robust HOG-SVM based Pedestrian Classification. Int. J. Comput. Appl. 2015, 114, 10–16. [Google Scholar]
- Su, Z.; Li, J.; Chang, J. Real-time visual tracking using complementary kernel support correlation filters. Front. Comput. Sci. 2020, 14, 417–429. [Google Scholar] [CrossRef]
- Pang, Y.; Cao, J.; Wang, J. JCS-Net: Joint Classification and Super-Resolution Network for Small-scale Pedestrian Detection in Surveillance Images. IEEE Trans. Inf. Forensics Secur. 2019, 14, 3322–3331. [Google Scholar] [CrossRef]
- Qu, Y.; Hao, J.; Peng, R. Machine-learning models for analyzing TSOM images of nanostructures. Opt. Express 2019, 27, 33978–33998. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Liu, D.; Sun, X.; Wu, F.; Zeng, W. On-line fall detection via a boosted cascade of hybrid features. In Proceedings of the 2017 IEEE International Conference on Multimedia & Expo Workshops (ICMEW), Hong Kong, China, 10–14 July 2017. [Google Scholar]
- Open Source Computer Vision Library. Available online: http://sourceforge.net/projects/opencvlibrary/ (accessed on 29 December 2019).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Tracker | AUC↑ | FPS |
|---|---|---|---|
| Video Sequence I | DaSiamRPN | 0.48 | 201 |
| HOG-SVM | 0.58 | 327 | |
| DaSiamRPN+HOG-SVM | 0.60 | 124 | |
| Ours | 0.64 | 123 | |
| Video Sequence II | DaSiamRPN | 0.48 | 195 |
| HOG-SVM | 0.53 | 324 | |
| DaSiamRPN+HOG-SVM | 0.57 | 135 | |
| Ours | 0.62 | 133 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sheng, M.; Wang, W.; Qin, H.; Wan, L.; Li, J.; Wan, W. A Novel Changing Athlete Body Real-Time Visual Tracking Algorithm Based on Distractor-Aware SiamRPN and HOG-SVM. Electronics 2020, 9, 378. https://doi.org/10.3390/electronics9020378
Sheng M, Wang W, Qin H, Wan L, Li J, Wan W. A Novel Changing Athlete Body Real-Time Visual Tracking Algorithm Based on Distractor-Aware SiamRPN and HOG-SVM. Electronics. 2020; 9(2):378. https://doi.org/10.3390/electronics9020378
Chicago/Turabian StyleSheng, Mingwei, Weizhe Wang, Hongde Qin, Lei Wan, Jun Li, and Weilin Wan. 2020. "A Novel Changing Athlete Body Real-Time Visual Tracking Algorithm Based on Distractor-Aware SiamRPN and HOG-SVM" Electronics 9, no. 2: 378. https://doi.org/10.3390/electronics9020378
APA StyleSheng, M., Wang, W., Qin, H., Wan, L., Li, J., & Wan, W. (2020). A Novel Changing Athlete Body Real-Time Visual Tracking Algorithm Based on Distractor-Aware SiamRPN and HOG-SVM. Electronics, 9(2), 378. https://doi.org/10.3390/electronics9020378