Abstract
Design and control of a lower-limb exoskeleton rehabilitation of the elderly are the main challenge for health care in the past decades. In order to satisfy the requirements of the elderly or disabled users, this paper presents a novel design and adaptive fuzzy control of lower-limb empowered rehabilitation, namely MOVING UP. Different from other rehabilitation devices, this article considers active rehabilitation training devices. Firstly, a novel product design method based on user experience is proposed for the lower-limb elderly exoskeleton rehabilitation. At the same time, in order to achieve a stable operation control for the assistant rehabilitation system, an adaptive fuzzy control scheme is discussed. Finally, the feasibility of the design and control method is validated with a detailed simulation study and the human-interaction test. With the booming demand in the global market for the assistive lower-limb exoskeleton, the methodology developed in this paper will bring more research and manufacturing interests.
1. Introduction
With the development of an aging society, research in the study and control of smart assistive exoskeletons has attracted a lot of interest [1,2,3,4]. Due to the aging populations, the physiological changes of organs and the resulting loss of function has lead to increased physical disability, which restricts the mobility of the elderly [5,6,7]. Furthermore, it results in loneliness, and it has a detrimental effect on their mental health. An assistive lower-limb exoskeleton is a device that serves humans with poor motor skills to walk. The lower-limb exoskeleton aims through human-like motion smoothly and naturally, is enhancing the lifestyle of the elderly, improving later life quality, benefiting older people with physical limitations and improving their physical and mental health [8].
The exoskeleton style is to connect the entire limb to the rehabilitation device and guide the limb to perform detailed rehabilitation exercises locally or entirely [9,10,11]. To improve the effect of limb rehabilitation, many researchers have conducted related research on exoskeleton rehabilitation devices. For example, Reference [12] proposed an upper limb stroke rehabilitation system, which was a system combining electrical stimulation and mechanical arm support. Electrical stimulation is applied to the two muscles of the arm and combined with VR to ensure accurate movements to improve the effectiveness of rehabilitation training. A wearable upper limb therapy robot based on Pneumatic Muscle Actuator (PMA) was introduced in Reference [13]. This device has five degrees of freedom, works similarly to human muscle functions, has high compliance and safety. Besides, Reference [14] developed a cable drive for the exoskeleton, which has seven degrees of freedom and can be used in medical, remote control, test research, and other fields.
In general, the structure of the exoskeleton rehabilitation device is simple, but it is challenging to carry out rehabilitation training for the local body parts, and the rehabilitation effect is not ideal [15,16]. The research of the end-effector rehabilitation device is mainly used in limb rehabilitation, remote control, and other fields, and its research direction focuses on improving freedom, ensuring safety and reducing complexity, and so forth. Existing exoskeleton rehabilitation devices are complicated and expensive, and they are mostly used in experiments and difficult to achieve marketization. Both types of rehabilitation devices have their own advantages and disadvantages. It is necessary to select a suitable rehabilitation device type in specific applications and match different training modes to achieve a better training effect [17].
The early version in Reference [18] developed by the Federal Institute of Technology in Zurich, was passive gait training. Continuous passive movement (CPM) machines and simple rehabilitation treadmills, which are widely used in clinical practice, generally only provide passive training modes. An ankle rehabilitation robot based on steady-state visual evoked potentials was discussed in Reference [19], which combined SSVEP signals with a virtual reality environment and was able to determine the subject’s intention to perform passive training. In addition, for rule-based control structures, a human-machine interface was presented in Reference [20]. The robot manipulator (RM) can perform all active and passive movements, and through the human-machine interface, no physical therapist (PT) is required to perform motions. An active rehabilitation exercise was presented with adjustable impedance and obtained positive rehabilitation training results in Reference [21]. On the other hand, a training mode combining passive stretching and active feedback with biofeedback was developed in Reference [22], which improved the ankle control and functional activity of children with cerebral palsy, thereby improving their motion control capabilities. The experiments in Reference [23] showed that continuous passive movement (CPM) as an auxiliary means of active exercise has no additional beneficial effects on pain, knee mobility, or walking ability compared with active exercise alone. A knee flexion angle and rapid follow-up of postoperative CPM applications could improve short-term knee flexion angle and long-term function [24].
The use of rehabilitation equipment has a positive effect on the gait rehabilitation of stroke patients. Still, the rehabilitation effects of different types of rehabilitation equipment seem to be similar, and no finding evidence that exoskeleton rehabilitation is more effective than end-effector rehabilitation [25]. It can be seen that there is no clear evidence to prove which form is more effective, and both methods have advantages and disadvantages [26,27]. However, the lower-limb rehabilitation device generally has a training effect on the entire limb, but it cannot specifically train a particular part of the limb. Therefore, the exoskeleton rehabilitation device has become a new research hot-spot in the field of rehabilitation devices to study how to improve the relevance and efficiency of training [28].
In summary, most of the current rehabilitation device is based on the optimization of the mechanical structure, and the designer ignores the humanistic care of the device to the user, especially for elderly users or disabled users. In this paper, based on the knowledge of art and combined with the user experience, we introduce a novel assistive lower-limb exoskeleton and adopt an adaptive fuzzy control scheme to achieve stability control. Simulation and the human-interaction test were conducted to validate its feasibility in terms of the proposed design and control methodology. The main contributions of this article are as follows:
- To evaluate close to the requirements of the elderly or disabled users for rehabilitation training, according to the user experience, an active assistive lower-limb exoskeleton is discussed.
- On the other hand, the adaptive fuzzy approximation-based position tracking controller is applied to obtain the high safety conditions of the rehabilitation training.
- The comparative tracking performance using classical proportional–integral–derivative (PID) method and proposed adaptive fuzzy control (AFC) method is presented, revealing that the developed rehabilitation device can meet the need of the elderly.
The remainder of this article is structured as follows: Section 2 illustrates the novel mechanism of the assistive lower-limb exoskeleton prototype; Section 3 reveals the adaptive fuzzy control of the developed lower-limb rehabilitation equipment; Finally, the results and discussions are discussed in Section 4, and the conclusion and the future work are presented in Section 5.
2. Novel Lower-Limb Exoskeleton Mechanical Design
MOVING UP lower-limb exoskeleton as shown in Figure 1 is aimed at solving the problem of deteriorating physical function and easing the suffering from hemorrhoids due to prolonged bed rest. By using the hands to move the legs and feet, lower-limb rehabilitation exercise for the elderly can be carried out in bed. This exercise, lets the elderly work out the whole of their body, going from “passive” to “active” and, enhances their self-confidence. In this section, the mechanical design will be discussed in terms of motivation, concept and analysis [29].

Figure 1.
Moving Up lower-limb exoskeleton.
2.1. Product Design Based On Emotional Experience
The product model, based on the emotional experience, as shown in Figure 2, is obtained by studying users and the environment through user experiences such as group interviews, contextual records, and user experiments. The circular development process, which is design-test-modify, can be applied to guide for nursing and rehabilitation products as a quantifiable indicator [30].
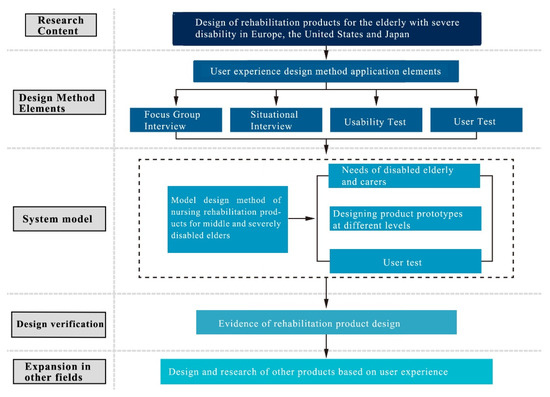
Figure 2.
Product design method based on user experience.
Firstly, the primary and potential needs of the product use process are studied through a user experience method. For example, the patients who usually use rehabilitation equipment are mainly stroke, hypertension, Parkinson, and so forth. These patients cannot take care of themselves when getting in or out of bed, urination, or bathing. Therefore, the functions of the middle-to-severe old heat nursing bed need to boil are anti-rollover, back-up, infusion, and urination.
Secondly, consider the user experience based on empathy design. Because some disabled people are unwilling or unable to communicate normally, it is not very easy to obtain sufficient information through user interviews. Only partial information can be obtained from the nurses. Empathic design research methods can enable designers to learn more deeply and experience the emotions and experiences of disabled elders in the process of using nursing and rehabilitation products, providing a basis for designing products.
At the same time, the product prototype is designed according to the needs of disabled elders and carers. User experience researchers and designers participate in the design process to analyze nursing rehabilitation products that meet the user experience of the elderly and carers. Finally, the product starts the iterative development process of design-test-modify, using the results of usability experiments as a quantitative indicator. If the product meets the standards of ease and friendliness, it can be considered to put on the market.
Future product design for the elderly should focus on accessibility. In a modern society with a high degree of scientific and technological development, all public space environments related to human food, clothing, housing and transportation, as well as the planning and design of various types of building facilities and equipment, must fully consider those with different levels of physical disabilities. People, the elderly, the needs of the masses, equipped with service functions and devices that can respond to these needs, create a modern living environment full of love and care, and truly protect human safety, convenience and comfort.
2.2. Mechanical Structure Development
The exoskeleton is mainly guided by product definition. In the initial stage, according to the needs of character modeling, the product definition was determined by combining the five aspects of the use environment, target population, problem-solving, user mode, and product characteristics. The use environment is the family. The target population is elderly with paralysis of lower limbs with mild to moderate disabilities. The main problems to be solved are the high cost of rehabilitation in the hospital, the singular movement of the traditional lower limb rehabilitation device, and the limited participation in the site. The method of use is to lie down on the bed and use the hands to drive the legs for lower limb rehabilitation training, assisted by family members or carers. Product features include coordinated body training, productive exercise modes, low bed use, and low cost. In order to improve the overall coordination of the body, two swivel handles are applied to assist hand movements. Besides, to increase the fun, the function of percussion music is added between the rotating handles during the deepening of the sketch. At the same time, it is envisaged that the product can be able to assist patients with foot-lifting movements, calf swing movements, and pedaling movements.
There are three sport mode of the lower-limb exoskeleton displayed in Figure 3, which is including the leg lifting sport mode, flexion and extension sport mode, and cycle racing sport mode.
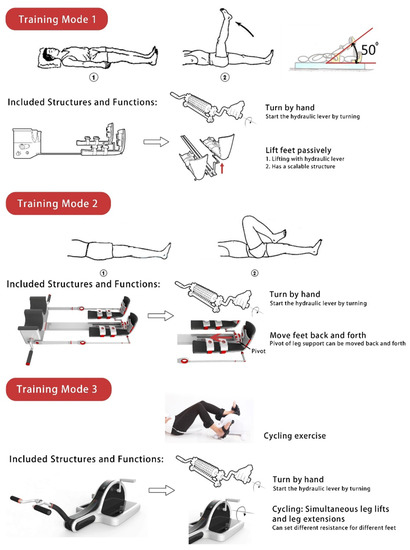
Figure 3.
The three sport mode of the developed lower-limb exoskeleton.
(1) Mode 1: Leg lifting exercise. The exercise is to lift the leg upwards without bending with the hip joint as the center. It is mainly used in the early stage of rehabilitation and can individually exercise the hip joint and the gluteus maximus. A vertical upward slide rail is designed at the fulcrum of leg support, and a hydraulic rod is utilized to achieve the capacity of slowly lifting and lowering leg support.
(2) Mode 2: Flexion and extension exercises. This training movement is mainly employed in the mid-rehabilitation period, and can individually exercise the knee joint, gastrocnemius muscle, and soleus muscle. In order to achieve this function, the leg of Leg support is connected to the horizontal slide rail of the Bottom shaft. The slide rail faces the same direction as the legs. Leg support uses the hydraulic rod to realize the function of slowly moving forward and backward.
(3) Mode 3: Cycle racing exercises. This training is mainly applied to the later stage of rehabilitation and can comprehensively exercise the hip joint, gluteal muscle, knee joint, gastrocnemius muscle, and soleus muscle. The main body is placed in the middle of the legs, and a rotating shaft is set at a position higher than the legs. Thus, the leg support on both sides is connected, and a reduction motor realizes the circular motion.
At the same time, the guideline of the three sport modes is illustrated in Figure 4. It can be seen that three different exercise modes are designed for different patients. Mode 1 is mainly for users with paralysis of the lower limbs, and hip joints need to be exercised. So exercise guidelines are set to 15 min/3–5 times, which is the simplest mode. Mode 2 is for users who train knees, so it is set to 20 min/2–4 times. This is a moderate difficulty rehabilitation exercise mode. At last, mode 3 is suitable for whole-body sports training, and requires coordinated movements of various joints. It is the most difficult exercise mode and has greater exercise intensity, so it is set to 20 min/1–3 times.
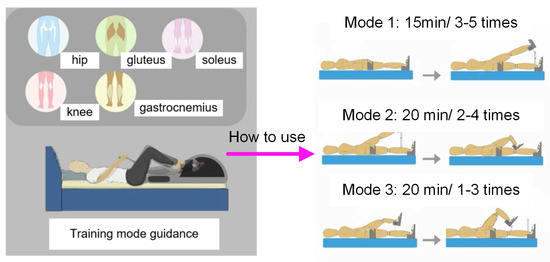
Figure 4.
The guideline of the developed lower-limb exoskeleton.
To achieve the coordinated movement between the legs and hands, a rotating handle is set on the chest. The patient can hold the rotating handle with both hands and perform circular movements of both hands with the axis of rotation as the center of the circle. Finally, the mechanical structure of the exoskeleton is exhibited in Figure 5.
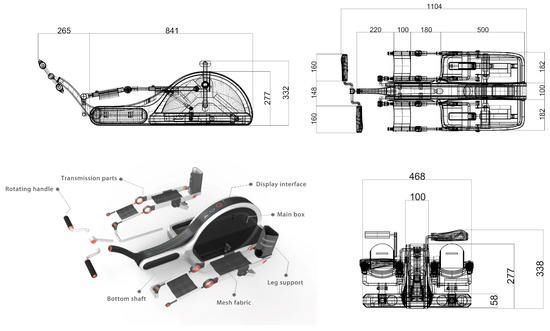
Figure 5.
Mechanical structure of the lower-limb exoskeleton Moving Up (mm).
3. Adaptive Controller Development and Validation
Because of the high security condition of the lower-limb exoskeleton for the old, it is fundamental to consider the tracking control of the subsystem [31,32,33]. In this section, a tracking controller of the lower-limb exoskeleton is developed by the adaptive fuzzy control algorithm in terms of the trajectory error.
3.1. Dynamic Model of the Developed Lower-Limb Exoskeleton
Inspired by References [34,35,36], the n-DOF dynamics of an exoskeleton system including the human and robot can be described in the task space as
where are the coordinates in the task space; is the joint displacements; is the Jacobian transformation matrix; is the coriolis and centrifugal forces; presents the elastic effects of joint stiffness, indicates the gravitational components including the human and exoskeleton; presents the inertial relationship including the elderly arm and robot; reveals the viscous effects because of the damping including the people and exoskeleton; is reflected as uncertain external interference which represent the reflex activation of the muscle, and other unknown mechanical disturbance; denotes the torques that are produced by the joints of the exoskeleton.
Assumption 1.
The time-varying disturbances are continuous in time and periodic with known period that is, [37,38,39,40].
The following formula can define the lower-limb dynamics at the motor shaft because a dc servomotor drives each joint of an exoskeleton.
where denotes the angular position vector of the motors; is the torque vector; denotes the load torque vector; is a diagonal matrix of the viscous friction coefficients, and is the diagonal matrix of the moment of inertia.
As each joint is driven by a de servomotor through a harmonic drive transmission system, the following relationship can be established:
where is a diagonal matrix of the gear ratios. The torque that is developed by the dc motor is proportional to the armature current. The expression is
where is the armature current vector, and is a diagonal matrix of the torque constants.
From (3)–(6), the manipulator-actuator dynamic model can be written as
where and .
The following properties [40] need to be used in the following derivations.
Property 1.
The inertia matrix is symmetric and positive, which is also bounded as
where and are positive constants.
Property 2.
The matrix and the time derivative of the inertia matrix satisfy
3.2. Adaptive Fuzzy Approximation
Uncertainties in practical systems can be divided into two parts, namely internal interference and external uncertainty [41,42,43]. The former mainly includes the case where the parameters such as mass and rotational inertia of the system are unknown, while the latter mainly refers to some unmodeled dynamics such as external disturbance and friction. To solve this problem, a fuzzy based control approach is developed for the lower-limb exoskeleton system, and can deal with bounded disturbances and uncertain dynamics [44,45,46].
Define the approximation function as follows:
where the components of the vector are the input variables of the approximators; is a vector of linear or nonlinear basis function; is a vector of adaptable weights; is the approximation error bounded over the compact set, which meets the condition as follows.
Property 3.
If .
The general approximation shows that a compact set can easily compensate the constant function with the desired precision by a linearly parameterized approximator.
where is the vector of ideal constant centers in the output layer; is the approximation error for the special case where ; The ideal weight vector , required for analytical purposes, is defined as the variable of P that minimizes for all .
Fuzzy logic systems could be adopted to achieve the above approximation [47,48,49]. Considering multiple inputs and single output FLS with the product-interface rule, singleton fuzzifier, center average defuzzifier, and Gaussian membership function is given by m fuzzy IF-THEN .
In this paper, we define the FLS as
where is the FLSs input vector; is the membership function of the fuzzy sets and .
Then, the approximation of the function can be represented as:
where is the weight parameter matrix; and are the basis function.
In this paper, we select the adaptive control law [40] to adjust the weight parameters subjected to and as follows:
where ; is a diagonal matrix determining the updated speed; is the system output error vector; is the last column of a symmetric positive defined matrix based on the Lyapunov function.
3.3. Controller Development
In order to achieve the reliable lower-limb exoskeleton dynamic model, and to evaluate the uncertain parameters and uncertainties [50,51], in this section, we investigate an approximation-based adaptive fuzzy control of the lower-limb exoskeleton to follow desired periodic trajectories for the knee joint and hip joint. The dynamic model can address as follows:
where are the state variables, and .
The desired trajectories in the task space are assumed to be periodic and twice differentiable satisfying where is a periodical constant, which can also be expressed by a reference model as
where is a known function, and are the desired states and outputs, respectively, which are generated by the reference model.
The control objective is to ensure that the outputs of the robot follow the desired trajectories in the task space.
4. Results and Discussion
4.1. Human-Interaction Test
In order to ensure the practicability of the product, a human-machine test of the product is required [52,53]. The test includes three parts, one is a leg exercise test, the other is a hand exercise test, and the third is a device space test. The performance of the human-interaction leg test for the lower-limb exoskeleton is exhibited in Figure 6. The leg exercise test is mainly to experience whether the body has any discomfort when performing various rehabilitation exercises on the bed to determine the appropriate movement trajectory in different exercises. Testing these three rehabilitation exercises on the bed yielded the following results: leg movements require hip and gluteal muscles and moderate difficulty when raising the legs to an angle of approximately 50°. Flexion and extension exercises require movements of the knee, gastrocnemius, and soleus muscles. The foot can efficiently complete the horizontal movement of about 40 cm forward and backward, and at this time, the knee joint can perform sufficient activities. In addition, cycling exercise requires comprehensive activities of the hip joint, gluteus maximus, knee joint, and the user ’s hips float during exercise. There is no point of focus, resulting in a lack of comfort.

Figure 6.
The performance of human-interaction leg test.
The results of force analysis for the lower-limb exoskeleton are displayed in Figure 7. The hand movement test is mainly to study how to reduce the difficulty of patients’ hand movements. This test mainly analyzes the two possible areas of the handle, including the upper part of the abdomen and the sides of the hip joint, and determines which area the handle is in to make the hand movement easier. The test results show that when the joystick is placed on both sides of the hip joint, the upper and lower arms swing more, and the position of the elbow and hand fluctuates greatly. When the joystick is located over the abdomen, the upper arm basically has no swing amplitude, and the lower arm swings larger, but the position of the elbow joint fluctuates slightly, and the position of the hand fluctuates greatly. Therefore, when the joystick is positioned over the abdomen, the hand swings less, the movement increases quickly, and the comfort is higher.
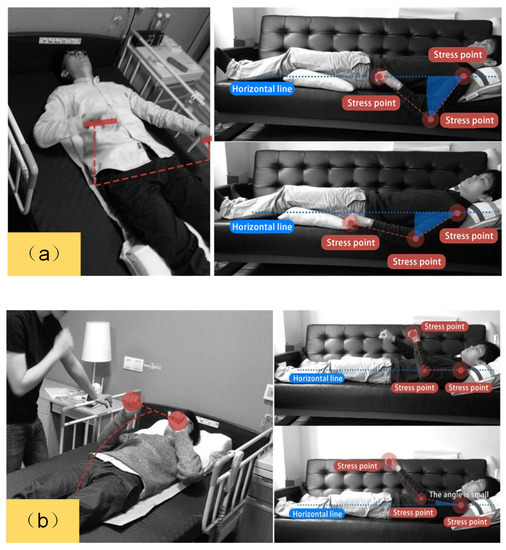
Figure 7.
Force analysis of the lower-limb exoskeleton. (a) Force analysis of the handle located on both sides of the hip joint; (b) Force analysis of the handle located above the abdomen.
The main purpose of equipment space testing is to study what equipment locations and sizes can reduce interference with leg rehabilitation training. From the motion space test shown in Figure 8, it can be concluded that the hip muscle, knee muscle, gastrocnemius muscle and flounder muscle have received advantage rehabilitation training performance. In particular, rehabilitation equipment trains patients “actively”.
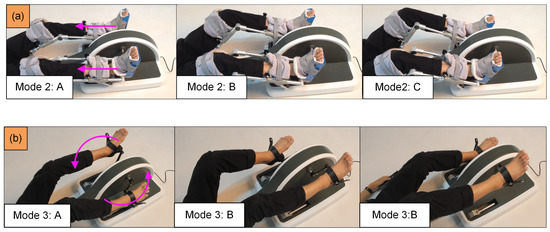
Figure 8.
Rehabilitation training results using the developed exoskeleton. (a) Experiment of training hip and knee; (b) Experiment of training gastrocnemius and soleus.
With the advancement of the times, the design of lower-limb rehabilitation products for the elderly has been widely recognized by society and captured the attention of designers. It is a product that uses structural innovations. It must take into account all aspects of the factors to ensure maximum user comfort, safety, and reliability. As a designer, to understand the needs of the market and master the direction of the future, we can design an excellent product that meets the needs of the public. In the process of designing products, we must thoroughly study the urgent needs of the elderly, make the design of rehabilitation products safe and feasible, more humane, and can meet the aesthetics of modern people to be recognized by the masses. In order to meet the needs of different users, there should be the possibility of optional accessories, but the essential functions are guaranteed first [54].
From the perspective of social care, the design fully considers the psychological characteristics of the elderly’s self-esteem, ease family pressure, and reduces the family’s economic burden. Let people pay more attention to the combination of the design of the elderly care products and their value and also let people pay more attention to the elderly in their lives. These people need a sense of society and family. Strengthening the protection of their lives helps to promote society’s feelings and their own sense of belonging.
4.2. Adaptive Control Experiment
In order to evaluate the feasibility of introducing the adaptive fuzzy control scheme to control the novel designed lower-limb exoskeleton which is developed to assist the patients for rehabilitation exercise, a simulation experiment is carried out with disturbances [55,56,57]. In the experiments, the six fuzzy membership function sets are chosen as and , which are characterized by with .
Two degrees of freedom of the lower-limb exoskeleton are involved for validation. To verify the moving capability of the hip joint and knee joint, a smooth input motion function is chosen as , and a corresponding disturbance function is introduced as . At the same time, the other desired joint trajectory is set for the knee joint, as , and the corresponding disturbance is set as .
Figure 9 demonstrates the tracking results using AFC method in position, speed, fuzzy compensation and input for knee joint and hip joint. It can be seen from the position tracking results that the proposed control scheme AFC can track the reference signal smoothly. In the case of noise interference, the AFC algorithm can track the desired position within 0.5 s, no matter in knee joint and hip joint. The adaptive fuzzy approximator can also quickly identify dynamic interference, and autonomous restrain and compensate the responding joints, achieving stability control of the rehabilitation device and ensuring the safety of users.
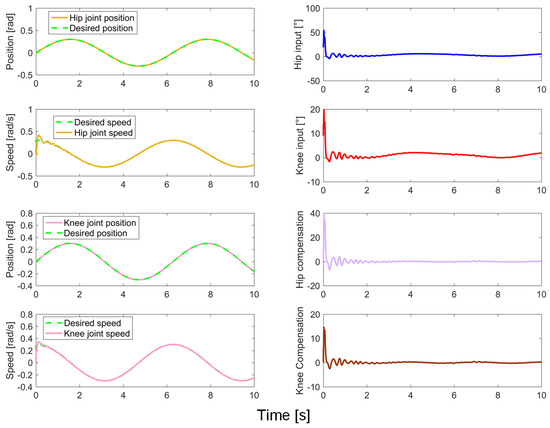
Figure 9.
The tracking results using adaptive fuzzy control (AFC) method in position, speed, fuzzy compensation and input for knee joint and hip joint.
At the same time, to further demonstrate the advantage of the AFC method in uncertain physical interaction, and connected with the safe rehabilitation training, some comparative simulations are implemented with the method of AFC and classical PID. The tracking performance for knee joint and hip joint under the dynamic disturbance with sinusoid input is displayed in Figure 10.
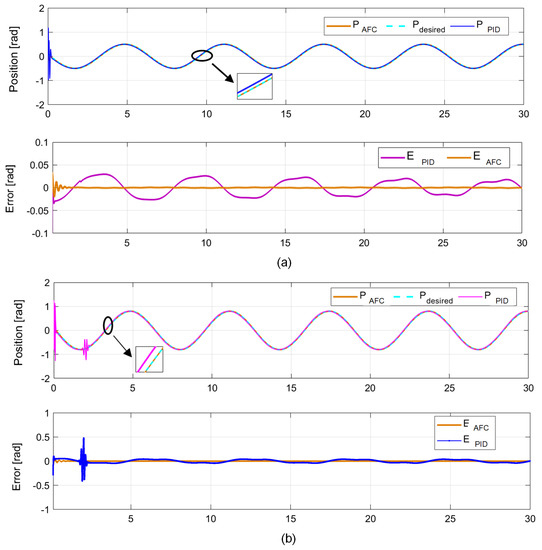
Figure 10.
The comparative performance of tracking control using PID and AFC method for hip joint. (a) Hip joint; (b) Knee joint. (Time: [s]).
Obviously, under the AFC method, the tracking error of the lower-limb exoskeleton is continuously reduced despite the external disturbance, no matter in knee joint and hip joint. However, there are some fluctuations in the position tracking using the PID approach. The tracking error can be constrained within rad under the presented AFC method, while the PID algorithm can maintain the error within , indicating that the proposed AFC method can achieve more precise position control and meet the high safety requirements of elderly rehabilitation devices.
Depended on the obtain tracking performance, we can summarize that the proposed AFC method can be adequately approximated for the dynamic interference in the lower-limb exoskeleton rehabilitation system with the higher precise and smoother in position error. Therefore, the presented algorithm can not only supervise the theoretical design of the elderly rehabilitation system but also can be applied to practical engineering applications.
5. Conclusions and Future Work
5.1. Conclusions
Based on the perspective of art, and combined with the needs of patients, this article designed a rehabilitation device for the elderly that accords with humanistic care. The main purpose is to develop an “active” elderly rehabilitation training device, namely MOVING UP. Firstly, a novel lower-limb exoskeleton rehabilitation is designed, and then an position tracking controller is implemented to verify the feasibility of the exoskeleton. Due to the challenge from the difference of the patients’ weight, an adaptive fuzzy control scheme is proposed to adapt the control input according to the online performance. Finally, the feasibility of the design and control method is validated with a simulation study. With the increasing demand for assistive lower-limb exoskeleton in the global market, the methodology proposed in this paper will attract more research and industry interests. At present, the lower-limb exoskeleton we developed for the disabled elderly has been industrialized in China, providing convenience for the patients to do rehabilitation exercise training. Future works we will mainly concentrate on the cooperation system to enhance the intellectual level of training services with the real lower-limb exoskeleton.
5.2. Limitation Points for Future Discussion
Nowadays, the active lower-limb exoskeleton system we developed for the elderly rehabilitation training and disabled users are considering to industrialize in China and some European countries, implementing convenience for the users to train safely.
Understanding how to develop an elderly rehabilitation training with a standard concept is a prerequisite. In the traditional product innovation of rehabilitation training for the elderly, technicians usually design passive rehabilitation devices and resolve the contradiction between existing products and technical characteristics in a compromised manner. However, this method cannot solve the actual needs of active rehabilitation training for the elderly, thereby limiting the performance of the product.
How to increase the safety training system of the rehabilitation devices is the challenge. As medical assistive equipment, elderly mobility service has remarkably significant security requirements. There is an external disturbance in the process of the lower-limb exoskeleton operation. Based on this, in this article, we succeed in developing the controller to improve safety and stability under uncertain physical interactions.
Finally, in the future works, because the materials of rehabilitation equipment are essential to the health and safety of the elderly, we will consider using soft materials to design exoskeleton. At the same time, considering the human-rehabilitation interaction, we want to apply the technology of teaching by demonstration to transfer the human skill to the machine.
Author Contributions
Conceptualization, J.L. and Y.H.; Data curation, Z.C. and X.L.; Formal analysis, Z.H.; Funding acquisition, X.Z.; Investigation, X.L.; Methodology, Z.C.; Project administration, J.L.; Resources, S.E.O. and Z.C.; Software, X.L.; Supervision, X.Z., J.L. and Y.H.; Validation, S.E.O., Z.H. and Y.H.; Writing—original draft, J.L. and Z.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest in the collection, analyses or in the decision to publish the results.
References
- Li, Z.; Su, C.Y.; Li, G.; Su, H. Fuzzy approximation-based adaptive backstepping control of an exoskeleton for human upper limbs. IEEE Trans. Fuzzy Syst. 2014, 23, 555–566. [Google Scholar] [CrossRef]
- Su, H.; Li, Z.; Li, G.; Yang, C. EMG-based neural network control of an upper-limb power-assist exoskeleton robot. In International Symposium on Neural Networks; Springer: Berlin/Heidelberg, Germany, 2013; pp. 204–211. [Google Scholar]
- Su, H.; Zhang, H.; Li, Z.; Su, C.Y. Adaptive fuzzy control of operation space constrained exoskeletons under unmodelled dynamics. In Proceedings of the IEEE 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 3277–3282. [Google Scholar]
- Li, Z.; Su, H.; Zhang, H.; Su, C.Y.; Chai, T. Barrier Lyapunov based control of dual-arm exoskeleton robots performing asymmetric bimanual tasks. In Proceedings of the IEEE 2014 International Conference on Advanced Mechatronic Systems, Tokyo, Japan, 10–12 August 2014; pp. 301–306. [Google Scholar]
- Cenciarini, M.; Dollar, A.M. Biomechanical considerations in the design of lower limb exoskeletons. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–6. [Google Scholar]
- Jatsun, S.; Savin, S.; Yatsun, A.; Postolnyi, A. Control system parameter optimization for lower limb exoskeleton with integrated elastic elements. In Advances in Cooperative Robotics; World Scientific: Singapore, 2017; pp. 797–805. [Google Scholar]
- Liu, D.X.; Wu, X.; Du, W.; Wang, C.; Chen, C.; Xu, T. Deep spatial-temporal model for rehabilitation gait: Optimal trajectory generation for knee joint of lower-limb exoskeleton. Assem. Autom. 2017, 37, 369–378. [Google Scholar] [CrossRef]
- Su, H.; Enayati, N.; Vantadori, L.; Spinoglio, A.; Ferrigno, G.; De Momi, E. Online human-like redundancy optimization for tele-operated anthropomorphic manipulators. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418814695. [Google Scholar] [CrossRef]
- Gupta, A.; O’Malley, M.K. Design of a haptic arm exoskeleton for training and rehabilitation. IEEE/ASME Trans. Mechatron. 2006, 11, 280–289. [Google Scholar] [CrossRef]
- Su, H.; Ferrigno, G.; De Momi, E. Event-based adaptive control of 7-dof serial robot for teleoperated mis. In Proceedings of the 6th National Congress of Bioengineering, Politecnico di Milano, Milano, Italy, 25–27 June 2018. [Google Scholar]
- Lo, H.S.; Xie, S.Q. Exoskeleton robots for upper-limb rehabilitation: State of the art and future prospects. Med. Eng. Phys. 2012, 34, 261–268. [Google Scholar] [CrossRef] [PubMed]
- Cai, Z.; Tong, D.; Meadmore, K.; Freeman, C.; Hughes, A.M.; Rogers, E.; Burridge, J. Design & control of a 3D stroke rehabilitation platform. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–6. [Google Scholar]
- Balasubramanian, S.; Wei, R.; Perez, M.; Shepard, B.; Koeneman, E.; Koeneman, J.; He, J. RUPERT: An exoskeleton robot for assisting rehabilitation of arm functions. In 2008 Virtual Rehabilitation; IEEE: Piscataway, NJ, USA, 2008; pp. 163–167. [Google Scholar]
- Perry, J.C.; Rosen, J.; Burns, S. Upper-limb powered exoskeleton design. IEEE/ASME Trans. Mechatron. 2007, 12, 408–417. [Google Scholar] [CrossRef]
- Yang, J.; Su, H.; Li, Z.; Ao, D.; Song, R. Adaptive control with a fuzzy tuner for cable-based rehabilitation robot. Int. J. Control Autom. Syst. 2016, 14, 865–875. [Google Scholar] [CrossRef]
- Li, Z.; Huang, B.; Ye, Z.; Deng, M.; Yang, C. Physical human–robot interaction of a robotic exoskeleton by admittance control. IEEE Trans. Ind. Electron. 2018, 65, 9614–9624. [Google Scholar] [CrossRef]
- Wu, X.; Li, Z.; Kan, Z.; Gao, H. Reference trajectory reshaping optimization and control of robotic exoskeletons for human-robot co-manipulation. IEEE Trans. Cybern. 2019. [Google Scholar] [CrossRef]
- Colombo, G.; Joerg, M.; Schreier, R.; Dietz, V. Treadmill training of paraplegic patients using a robotic orthosis. J. Rehabil. Res. Dev. 2000, 37, 693–700. [Google Scholar]
- Zeng, X.; Zhu, G.; Yue, L.; Zhang, M.; Xie, S. A feasibility study of ssvep-based passive training on an ankle rehabilitation robot. J. Healthc. Eng. 2017, 1, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Akdoğan, E.; Adli, M.A. The design and control of a therapeutic exercise robot for lower limb rehabilitation: Physiotherabot. Mechatronics 2011, 21, 509–522. [Google Scholar] [CrossRef]
- Rosado, W.M.A.; Ortega, A.B.; Valdes, L.G.V.; Ascencio, J.R.; Beltran, C.D.G. Active rehabilitation exercises with a parallel structure ankle rehabilitation prototype. IEEE Lat. Am. Trans. 2017, 15, 786–794. [Google Scholar] [CrossRef]
- Wu, Y.N.; Hwang, M.; Ren, Y.; Gaebler-Spira, D.; Zhang, L.Q. Combined passive stretching and active movement rehabilitation of lower-limb impairments in children with cerebral palsy using a portable robot. Neurorehabil. Neural Repair 2011, 25, 378–385. [Google Scholar] [CrossRef]
- Bruun-Olsen, V.; Heiberg, K.E.; Mengshoel, A.M. Continuous passive motion as an adjunct to active exercises in early rehabilitation following total knee arthroplasty–a randomized controlled trial. Disabil. Rehabil. 2009, 31, 277–283. [Google Scholar] [CrossRef]
- Liao, C.D.; Huang, Y.C.; Lin, L.F.; Chiu, Y.S.; Tsai, J.C.; Chen, C.L.; Liou, T.H. Continuous passive motion and its effects on knee flexion after total knee arthroplasty in patients with knee osteoarthritis. Knee Surg. Sports Traumatol. Arthrosc. 2016, 24, 2578–2586. [Google Scholar] [CrossRef]
- Zhang, X.; Li, J.; Fan, K.; Chen, Z.; Hu, Z.; Yu, Y. Neural approximation enhanced predictive tracking control of a novel designed four-wheeled rollator. Applied Sci. 2020, 10, 125. [Google Scholar] [CrossRef]
- Su, H.; Qi, W.; Yang, C.; Aliverti, A.; Ferrigno, G.; De Momi, E. Deep neural network approach in human-like redundancy optimization for anthropomorphic manipulators. IEEE Access 2019, 7, 124207–124216. [Google Scholar] [CrossRef]
- Li, Z.; Huang, B.; Ajoudani, A.; Yang, C.; Su, C.Y.; Bicchi, A. Asymmetric bimanual control of dual-arm exoskeletons for human-cooperative manipulations. IEEE Trans. Robotics 2017, 34, 264–271. [Google Scholar] [CrossRef]
- Wu, X.; Li, Z. Cooperative manipulation of wearable dual-arm exoskeletons using force communication between partners. IEEE Trans. Ind. Electron. 2019, 2, 1–10. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, Y.; Luo, L.; Su, W.; Zhao, K.; Xu, C.; Huang, J.; Pi, M. Hybrid brain/muscle signals powered wearable walking exoskeleton enhancing motor ability in climbing stairs activity. IEEE Trans. Med. Robot. Bionics 2019, 1, 218–227. [Google Scholar] [CrossRef]
- Li, Z.; Li, J.; Zhao, S.; Yuan, Y.; Kang, Y.; Chen, C.P. Adaptive neural control of a kinematically redundant exoskeleton robot using brain-machine interfaces. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 3558–3571. [Google Scholar] [CrossRef]
- Lin, C.W.; Su, S.F.; Chen, M.C. Indirect adaptive fuzzy decoupling control with a lower limb exoskeleton. In Proceedings of the IEEE 2016 International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, Taiwan, 31 August–2 September 2016; pp. 1–5. [Google Scholar]
- Ou, Y.; Li, Z.; Li, G.; Su, C.Y. Adaptive fuzzy tracking control of a human lower limb with an exoskeleton. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 1937–1942. [Google Scholar]
- Sergey, J.; Sergei, S.; Andrey, Y. Comparative analysis of iterative LQR and adaptive PD controllers for a lower limb exoskeleton. In Proceedings of the 2016 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Chengdu, China, 19–22 June 2016; pp. 239–244. [Google Scholar]
- Burdet, E.; Tee, K.P.; Mareels, I.; Milner, T.E.; Chew, C.M.; Franklin, D.W.; Osu, R.; Kawato, M. Stability and motor adaptation in human arm movements. Biol. Cybern. 2006, 94, 20–32. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Wang, X.; Zhang, S.; Zong, G. Adaptive neural backstepping control design for a class of nonsmooth nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 1–12. [Google Scholar] [CrossRef]
- Tee, K.P.; Burdet, E.; Chew, C.M.; Milner, T.E. A model of force and impedance in human arm movements. Biol. Cybern. 2004, 90, 368–375. [Google Scholar] [CrossRef] [PubMed]
- Ding, Z. Asymptotic rejection of unmatched general periodic disturbances in a class of nonlinear systems. IET Control Theory Appl. 2008, 2, 269–276. [Google Scholar] [CrossRef]
- Bodson, M.; Douglas, S.C. Adaptive algorithms for the rejection of sinusoidal disturbances with unknown frequency. Automatica 1997, 33, 2213–2221. [Google Scholar] [CrossRef]
- Ding, Z. Asymptotic rejection of asymmetric periodic disturbances in output-feedback nonlinear systems. Automatica 2007, 43, 555–561. [Google Scholar] [CrossRef]
- Marino, R.; Santosuosso, G.L.; Tomei, P. Robust adaptive compensation of biased sinusoidal disturbances with unknown frequency. Automatica 2003, 39, 1755–1761. [Google Scholar] [CrossRef]
- Yu, S.; Wang, Z.; Zhang, K. Sequential time-dependent reliability analysis for the lower extremity exoskeleton under uncertainty. Reliab. Eng. Syst. Safety 2018, 170, 45–52. [Google Scholar] [CrossRef]
- Kazerooni, H.; Racine, J.L.; Huang, L.; Steger, R. On the control of the berkeley lower extremity exoskeleton (BLEEX). In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 4353–4360. [Google Scholar]
- Brahmi, B.; Saad, M.; Lam, J.T.A.T.; Luna, C.O.; Archambault, P.S.; Rahman, M.H. Adaptive control of a 7-DOF exoskeleton robot with uncertainties on kinematics and dynamics. Eur. J. Control 2018, 42, 77–87. [Google Scholar] [CrossRef]
- Su, H.; Sandoval, J.; Vieyres, P.; Poisson, G.; Ferrigno, G.; De Momi, E. Safety-enhanced collaborative framework for tele-operated minimally invasive surgery using a 7-DoF torque-controlled robot. Int. J. Control Autom. Syst. 2018, 16, 2915–2923. [Google Scholar] [CrossRef]
- Huo, X.; Ma, L.; Zhao, X.; Niu, B.; Zong, G. Observer-based adaptive fuzzy tracking control of MIMO switched nonlinear systems preceded by unknown backlash-like hysteresis. Inf. Sci. 2019, 490, 369–386. [Google Scholar] [CrossRef]
- Chen, B.; Liu, X.P.; Ge, S.S.; Lin, C. Adaptive fuzzy control of a class of nonlinear systems by fuzzy approximation approach. IEEE Trans. Fuzzy Syst. 2012, 20, 1012–1021. [Google Scholar] [CrossRef]
- Li, Z.; Su, C.Y.; Wang, L.; Chen, Z.; Chai, T. Nonlinear disturbance observer-based control design for a robotic exoskeleton incorporating fuzzy approximation. IEEE Trans. Ind. Electron. 2015, 62, 5763–5775. [Google Scholar] [CrossRef]
- Zhao, X.; Zheng, X.; Niu, B.; Liu, L. Adaptive tracking control for a class of uncertain switched nonlinear systems. Automatica 2015, 52, 185–191. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, X.; Chen, B.; Wu, H. Development of an RBFN-based neural-fuzzy adaptive control strategy for an upper limb rehabilitation exoskeleton. Mechatronics 2018, 53, 85–94. [Google Scholar] [CrossRef]
- Yang, C.; Jiang, Y.; Li, Z.; He, W.; Su, C.Y. Neural control of bimanual robots with guaranteed global stability and motion precision. IEEE Trans. Ind. Inf. 2016, 13, 1162–1171. [Google Scholar] [CrossRef]
- Shi, D.; Chen, T.; Shi, L. An event-triggered approach to state estimation with multiple point-and set-valued measurements. Automatica 2014, 50, 1641–1648. [Google Scholar] [CrossRef]
- Su, H.; Yang, C.; Mdeihly, H.; Rizzo, A.; Ferrigno, G.; De Momi, E. Neural network enhanced robot tool identification and calibration for bilateral teleoperation. IEEE Access 2019, 7, 122041–122051. [Google Scholar] [CrossRef]
- Li, Z.; Xu, C.; Wei, Q.; Shi, C.; Su, C.Y. Human-inspired control of dual-arm exoskeleton robots with force and impedance adaptation. IEEE Trans. Syst. Man Cybern. Syst. 2018, 1, 1–10. [Google Scholar] [CrossRef]
- Zhang, X.; Li, J.; Hu, Z.; Qi, W.; Zhang, L.; Hu, Y.; Su, H.; Ferrigno, G.; Momi, E.D. Novel design and lateral stability tracking control of a four-wheeled rollator. Appl. Sci. 2019, 9, 2327. [Google Scholar] [CrossRef]
- Mushage, B.O.; Chedjou, J.C.; Kyamakya, K. Fuzzy neural network and observer-based fault-tolerant adaptive nonlinear control of uncertain 5-DOF upper-limb exoskeleton robot for passive rehabilitation. Nonl. Dyn. 2017, 87, 2021–2037. [Google Scholar] [CrossRef]
- Su, H.; Salih, E.O.; Li, Z.; Li, J.; Ferrigno, G.; Momi, E.D. Internet of things (IoT)-based collaborative control of a redundant manipulator for teleoperated minimally invasive surgeries. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–4 June 2020. [Google Scholar]
- Zhang, X.; Wang, H.; Tian, Y.; Peyrodie, L.; Wang, X. Model-free based neural network control with time-delay estimation for lower extremity exoskeleton. Neurocomputing 2018, 272, 178–188. [Google Scholar] [CrossRef]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).