Novel Design and Adaptive Fuzzy Control of a Lower-Limb Elderly Rehabilitation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- To evaluate close to the requirements of the elderly or disabled users for rehabilitation training, according to the user experience, an active assistive lower-limb exoskeleton is discussed.
- On the other hand, the adaptive fuzzy approximation-based position tracking controller is applied to obtain the high safety conditions of the rehabilitation training.
- The comparative tracking performance using classical proportional–integral–derivative (PID) method and proposed adaptive fuzzy control (AFC) method is presented, revealing that the developed rehabilitation device can meet the need of the elderly.
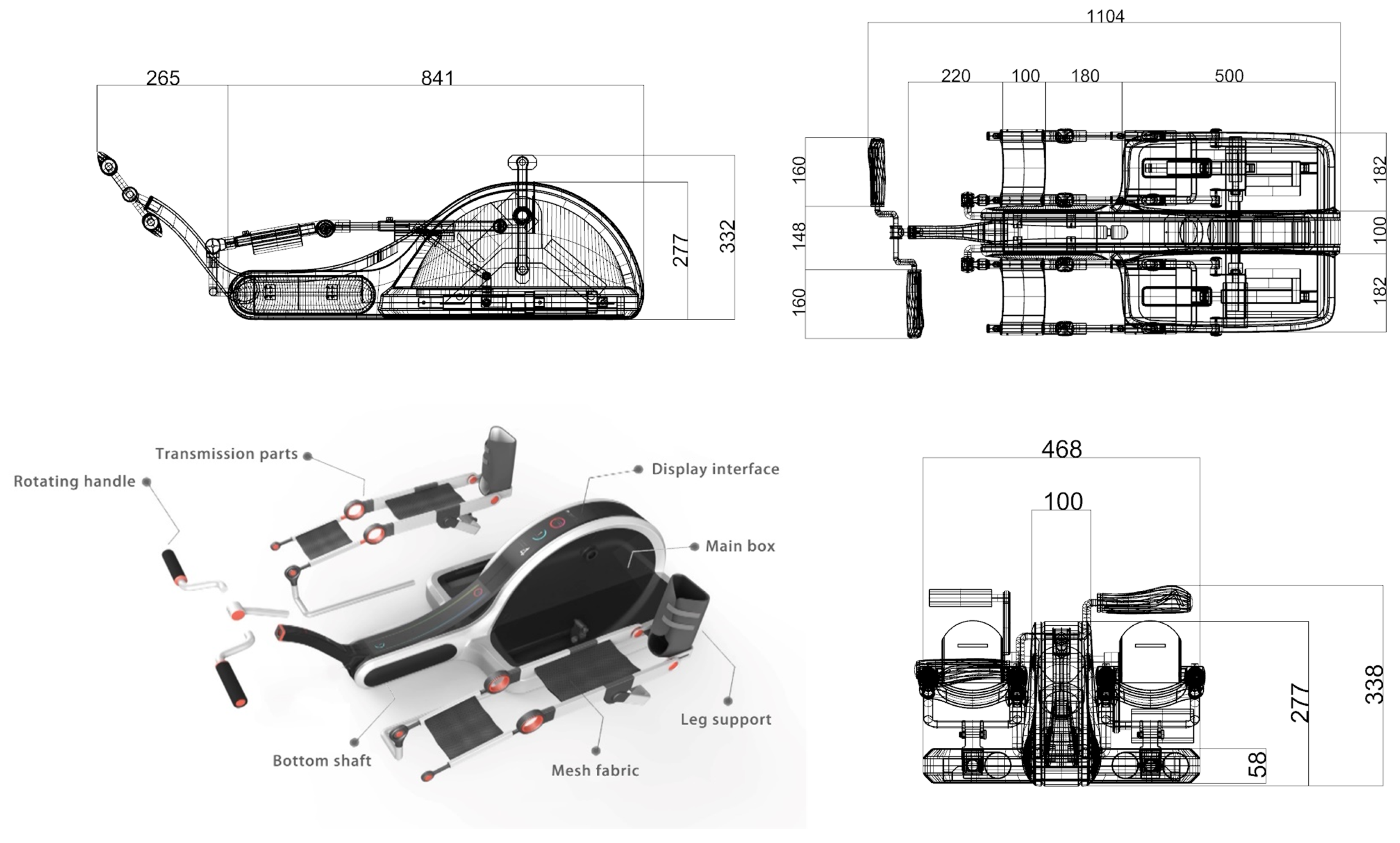
2. Novel Lower-Limb Exoskeleton Mechanical Design
2.1. Product Design Based On Emotional Experience
2.2. Mechanical Structure Development
3. Adaptive Controller Development and Validation
3.1. Dynamic Model of the Developed Lower-Limb Exoskeleton
3.2. Adaptive Fuzzy Approximation
3.3. Controller Development
4. Results and Discussion
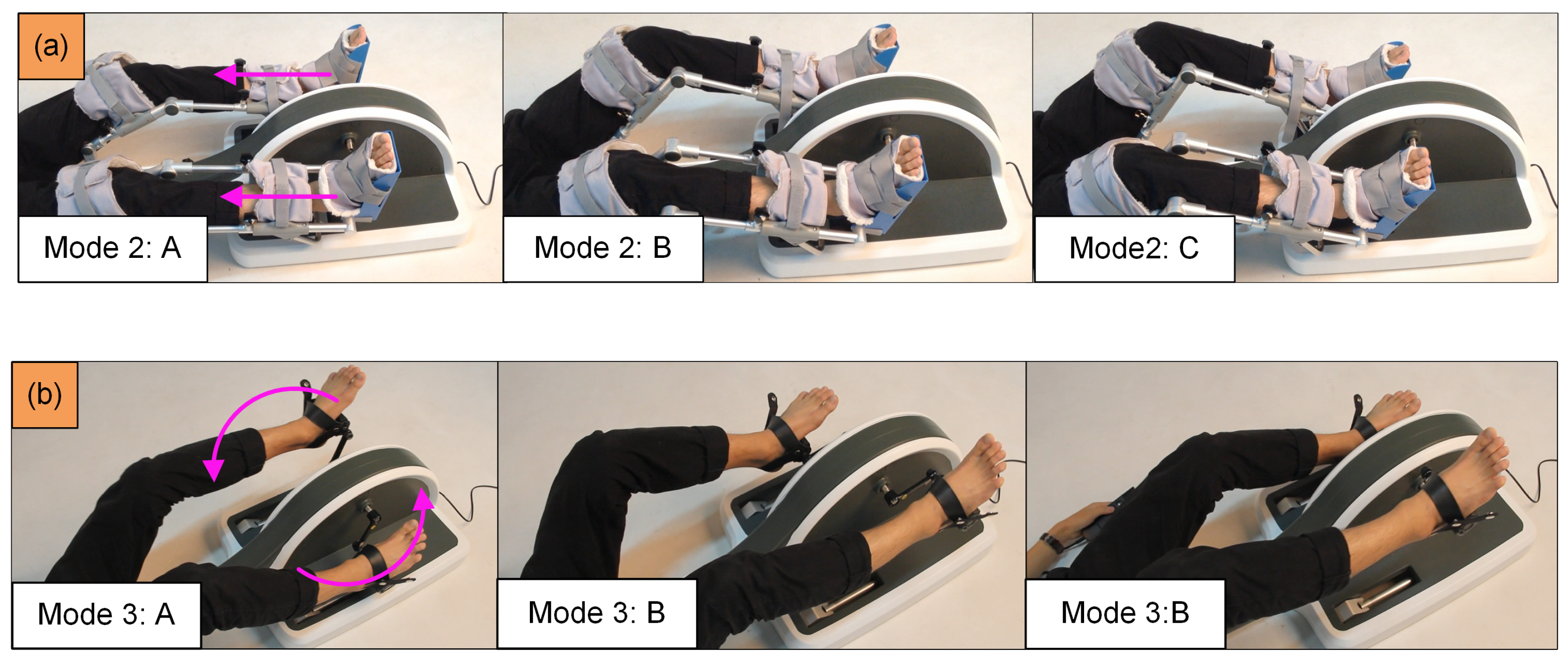
4.1. Human-Interaction Test
4.2. Adaptive Control Experiment
5. Conclusions and Future Work
5.1. Conclusions
5.2. Limitation Points for Future Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Li, Z.; Su, C.Y.; Li, G.; Su, H. Fuzzy approximation-based adaptive backstepping control of an exoskeleton for human upper limbs. IEEE Trans. Fuzzy Syst. 2014, 23, 555–566. [Google Scholar] [CrossRef]
- Su, H.; Li, Z.; Li, G.; Yang, C. EMG-based neural network control of an upper-limb power-assist exoskeleton robot. In International Symposium on Neural Networks; Springer: Berlin/Heidelberg, Germany, 2013; pp. 204–211. [Google Scholar]
- Su, H.; Zhang, H.; Li, Z.; Su, C.Y. Adaptive fuzzy control of operation space constrained exoskeletons under unmodelled dynamics. In Proceedings of the IEEE 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 3277–3282. [Google Scholar]
- Li, Z.; Su, H.; Zhang, H.; Su, C.Y.; Chai, T. Barrier Lyapunov based control of dual-arm exoskeleton robots performing asymmetric bimanual tasks. In Proceedings of the IEEE 2014 International Conference on Advanced Mechatronic Systems, Tokyo, Japan, 10–12 August 2014; pp. 301–306. [Google Scholar]
- Cenciarini, M.; Dollar, A.M. Biomechanical considerations in the design of lower limb exoskeletons. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–6. [Google Scholar]
- Jatsun, S.; Savin, S.; Yatsun, A.; Postolnyi, A. Control system parameter optimization for lower limb exoskeleton with integrated elastic elements. In Advances in Cooperative Robotics; World Scientific: Singapore, 2017; pp. 797–805. [Google Scholar]
- Liu, D.X.; Wu, X.; Du, W.; Wang, C.; Chen, C.; Xu, T. Deep spatial-temporal model for rehabilitation gait: Optimal trajectory generation for knee joint of lower-limb exoskeleton. Assem. Autom. 2017, 37, 369–378. [Google Scholar] [CrossRef]
- Su, H.; Enayati, N.; Vantadori, L.; Spinoglio, A.; Ferrigno, G.; De Momi, E. Online human-like redundancy optimization for tele-operated anthropomorphic manipulators. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418814695. [Google Scholar] [CrossRef]
- Gupta, A.; O’Malley, M.K. Design of a haptic arm exoskeleton for training and rehabilitation. IEEE/ASME Trans. Mechatron. 2006, 11, 280–289. [Google Scholar] [CrossRef]
- Su, H.; Ferrigno, G.; De Momi, E. Event-based adaptive control of 7-dof serial robot for teleoperated mis. In Proceedings of the 6th National Congress of Bioengineering, Politecnico di Milano, Milano, Italy, 25–27 June 2018. [Google Scholar]
- Lo, H.S.; Xie, S.Q. Exoskeleton robots for upper-limb rehabilitation: State of the art and future prospects. Med. Eng. Phys. 2012, 34, 261–268. [Google Scholar] [CrossRef] [PubMed]
- Cai, Z.; Tong, D.; Meadmore, K.; Freeman, C.; Hughes, A.M.; Rogers, E.; Burridge, J. Design & control of a 3D stroke rehabilitation platform. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–6. [Google Scholar]
- Balasubramanian, S.; Wei, R.; Perez, M.; Shepard, B.; Koeneman, E.; Koeneman, J.; He, J. RUPERT: An exoskeleton robot for assisting rehabilitation of arm functions. In 2008 Virtual Rehabilitation; IEEE: Piscataway, NJ, USA, 2008; pp. 163–167. [Google Scholar]
- Perry, J.C.; Rosen, J.; Burns, S. Upper-limb powered exoskeleton design. IEEE/ASME Trans. Mechatron. 2007, 12, 408–417. [Google Scholar] [CrossRef]
- Yang, J.; Su, H.; Li, Z.; Ao, D.; Song, R. Adaptive control with a fuzzy tuner for cable-based rehabilitation robot. Int. J. Control Autom. Syst. 2016, 14, 865–875. [Google Scholar] [CrossRef]
- Li, Z.; Huang, B.; Ye, Z.; Deng, M.; Yang, C. Physical human–robot interaction of a robotic exoskeleton by admittance control. IEEE Trans. Ind. Electron. 2018, 65, 9614–9624. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Li, Z.; Kan, Z.; Gao, H. Reference trajectory reshaping optimization and control of robotic exoskeletons for human-robot co-manipulation. IEEE Trans. Cybern. 2019. [Google Scholar] [CrossRef]
- Colombo, G.; Joerg, M.; Schreier, R.; Dietz, V. Treadmill training of paraplegic patients using a robotic orthosis. J. Rehabil. Res. Dev. 2000, 37, 693–700. [Google Scholar]
- Zeng, X.; Zhu, G.; Yue, L.; Zhang, M.; Xie, S. A feasibility study of ssvep-based passive training on an ankle rehabilitation robot. J. Healthc. Eng. 2017, 1, 1–9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Akdoğan, E.; Adli, M.A. The design and control of a therapeutic exercise robot for lower limb rehabilitation: Physiotherabot. Mechatronics 2011, 21, 509–522. [Google Scholar] [CrossRef]
- Rosado, W.M.A.; Ortega, A.B.; Valdes, L.G.V.; Ascencio, J.R.; Beltran, C.D.G. Active rehabilitation exercises with a parallel structure ankle rehabilitation prototype. IEEE Lat. Am. Trans. 2017, 15, 786–794. [Google Scholar] [CrossRef]
- Wu, Y.N.; Hwang, M.; Ren, Y.; Gaebler-Spira, D.; Zhang, L.Q. Combined passive stretching and active movement rehabilitation of lower-limb impairments in children with cerebral palsy using a portable robot. Neurorehabil. Neural Repair 2011, 25, 378–385. [Google Scholar] [CrossRef]
- Bruun-Olsen, V.; Heiberg, K.E.; Mengshoel, A.M. Continuous passive motion as an adjunct to active exercises in early rehabilitation following total knee arthroplasty–a randomized controlled trial. Disabil. Rehabil. 2009, 31, 277–283. [Google Scholar] [CrossRef]
- Liao, C.D.; Huang, Y.C.; Lin, L.F.; Chiu, Y.S.; Tsai, J.C.; Chen, C.L.; Liou, T.H. Continuous passive motion and its effects on knee flexion after total knee arthroplasty in patients with knee osteoarthritis. Knee Surg. Sports Traumatol. Arthrosc. 2016, 24, 2578–2586. [Google Scholar] [CrossRef]
- Zhang, X.; Li, J.; Fan, K.; Chen, Z.; Hu, Z.; Yu, Y. Neural approximation enhanced predictive tracking control of a novel designed four-wheeled rollator. Applied Sci. 2020, 10, 125. [Google Scholar] [CrossRef] [Green Version]
- Su, H.; Qi, W.; Yang, C.; Aliverti, A.; Ferrigno, G.; De Momi, E. Deep neural network approach in human-like redundancy optimization for anthropomorphic manipulators. IEEE Access 2019, 7, 124207–124216. [Google Scholar] [CrossRef]
- Li, Z.; Huang, B.; Ajoudani, A.; Yang, C.; Su, C.Y.; Bicchi, A. Asymmetric bimanual control of dual-arm exoskeletons for human-cooperative manipulations. IEEE Trans. Robotics 2017, 34, 264–271. [Google Scholar] [CrossRef]
- Wu, X.; Li, Z. Cooperative manipulation of wearable dual-arm exoskeletons using force communication between partners. IEEE Trans. Ind. Electron. 2019, 2, 1–10. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, Y.; Luo, L.; Su, W.; Zhao, K.; Xu, C.; Huang, J.; Pi, M. Hybrid brain/muscle signals powered wearable walking exoskeleton enhancing motor ability in climbing stairs activity. IEEE Trans. Med. Robot. Bionics 2019, 1, 218–227. [Google Scholar] [CrossRef]
- Li, Z.; Li, J.; Zhao, S.; Yuan, Y.; Kang, Y.; Chen, C.P. Adaptive neural control of a kinematically redundant exoskeleton robot using brain-machine interfaces. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 3558–3571. [Google Scholar] [CrossRef]
- Lin, C.W.; Su, S.F.; Chen, M.C. Indirect adaptive fuzzy decoupling control with a lower limb exoskeleton. In Proceedings of the IEEE 2016 International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, Taiwan, 31 August–2 September 2016; pp. 1–5. [Google Scholar]
- Ou, Y.; Li, Z.; Li, G.; Su, C.Y. Adaptive fuzzy tracking control of a human lower limb with an exoskeleton. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 1937–1942. [Google Scholar]
- Sergey, J.; Sergei, S.; Andrey, Y. Comparative analysis of iterative LQR and adaptive PD controllers for a lower limb exoskeleton. In Proceedings of the 2016 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Chengdu, China, 19–22 June 2016; pp. 239–244. [Google Scholar]
- Burdet, E.; Tee, K.P.; Mareels, I.; Milner, T.E.; Chew, C.M.; Franklin, D.W.; Osu, R.; Kawato, M. Stability and motor adaptation in human arm movements. Biol. Cybern. 2006, 94, 20–32. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Wang, X.; Zhang, S.; Zong, G. Adaptive neural backstepping control design for a class of nonsmooth nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 1–12. [Google Scholar] [CrossRef]
- Tee, K.P.; Burdet, E.; Chew, C.M.; Milner, T.E. A model of force and impedance in human arm movements. Biol. Cybern. 2004, 90, 368–375. [Google Scholar] [CrossRef] [PubMed]
- Ding, Z. Asymptotic rejection of unmatched general periodic disturbances in a class of nonlinear systems. IET Control Theory Appl. 2008, 2, 269–276. [Google Scholar] [CrossRef]
- Bodson, M.; Douglas, S.C. Adaptive algorithms for the rejection of sinusoidal disturbances with unknown frequency. Automatica 1997, 33, 2213–2221. [Google Scholar] [CrossRef]
- Ding, Z. Asymptotic rejection of asymmetric periodic disturbances in output-feedback nonlinear systems. Automatica 2007, 43, 555–561. [Google Scholar] [CrossRef]
- Marino, R.; Santosuosso, G.L.; Tomei, P. Robust adaptive compensation of biased sinusoidal disturbances with unknown frequency. Automatica 2003, 39, 1755–1761. [Google Scholar] [CrossRef]
- Yu, S.; Wang, Z.; Zhang, K. Sequential time-dependent reliability analysis for the lower extremity exoskeleton under uncertainty. Reliab. Eng. Syst. Safety 2018, 170, 45–52. [Google Scholar] [CrossRef]
- Kazerooni, H.; Racine, J.L.; Huang, L.; Steger, R. On the control of the berkeley lower extremity exoskeleton (BLEEX). In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 4353–4360. [Google Scholar]
- Brahmi, B.; Saad, M.; Lam, J.T.A.T.; Luna, C.O.; Archambault, P.S.; Rahman, M.H. Adaptive control of a 7-DOF exoskeleton robot with uncertainties on kinematics and dynamics. Eur. J. Control 2018, 42, 77–87. [Google Scholar] [CrossRef]
- Su, H.; Sandoval, J.; Vieyres, P.; Poisson, G.; Ferrigno, G.; De Momi, E. Safety-enhanced collaborative framework for tele-operated minimally invasive surgery using a 7-DoF torque-controlled robot. Int. J. Control Autom. Syst. 2018, 16, 2915–2923. [Google Scholar] [CrossRef]
- Huo, X.; Ma, L.; Zhao, X.; Niu, B.; Zong, G. Observer-based adaptive fuzzy tracking control of MIMO switched nonlinear systems preceded by unknown backlash-like hysteresis. Inf. Sci. 2019, 490, 369–386. [Google Scholar] [CrossRef]
- Chen, B.; Liu, X.P.; Ge, S.S.; Lin, C. Adaptive fuzzy control of a class of nonlinear systems by fuzzy approximation approach. IEEE Trans. Fuzzy Syst. 2012, 20, 1012–1021. [Google Scholar] [CrossRef]
- Li, Z.; Su, C.Y.; Wang, L.; Chen, Z.; Chai, T. Nonlinear disturbance observer-based control design for a robotic exoskeleton incorporating fuzzy approximation. IEEE Trans. Ind. Electron. 2015, 62, 5763–5775. [Google Scholar] [CrossRef]
- Zhao, X.; Zheng, X.; Niu, B.; Liu, L. Adaptive tracking control for a class of uncertain switched nonlinear systems. Automatica 2015, 52, 185–191. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, X.; Chen, B.; Wu, H. Development of an RBFN-based neural-fuzzy adaptive control strategy for an upper limb rehabilitation exoskeleton. Mechatronics 2018, 53, 85–94. [Google Scholar] [CrossRef]
- Yang, C.; Jiang, Y.; Li, Z.; He, W.; Su, C.Y. Neural control of bimanual robots with guaranteed global stability and motion precision. IEEE Trans. Ind. Inf. 2016, 13, 1162–1171. [Google Scholar] [CrossRef] [Green Version]
- Shi, D.; Chen, T.; Shi, L. An event-triggered approach to state estimation with multiple point-and set-valued measurements. Automatica 2014, 50, 1641–1648. [Google Scholar] [CrossRef]
- Su, H.; Yang, C.; Mdeihly, H.; Rizzo, A.; Ferrigno, G.; De Momi, E. Neural network enhanced robot tool identification and calibration for bilateral teleoperation. IEEE Access 2019, 7, 122041–122051. [Google Scholar] [CrossRef]
- Li, Z.; Xu, C.; Wei, Q.; Shi, C.; Su, C.Y. Human-inspired control of dual-arm exoskeleton robots with force and impedance adaptation. IEEE Trans. Syst. Man Cybern. Syst. 2018, 1, 1–10. [Google Scholar] [CrossRef]
- Zhang, X.; Li, J.; Hu, Z.; Qi, W.; Zhang, L.; Hu, Y.; Su, H.; Ferrigno, G.; Momi, E.D. Novel design and lateral stability tracking control of a four-wheeled rollator. Appl. Sci. 2019, 9, 2327. [Google Scholar] [CrossRef] [Green Version]
- Mushage, B.O.; Chedjou, J.C.; Kyamakya, K. Fuzzy neural network and observer-based fault-tolerant adaptive nonlinear control of uncertain 5-DOF upper-limb exoskeleton robot for passive rehabilitation. Nonl. Dyn. 2017, 87, 2021–2037. [Google Scholar] [CrossRef]
- Su, H.; Salih, E.O.; Li, Z.; Li, J.; Ferrigno, G.; Momi, E.D. Internet of things (IoT)-based collaborative control of a redundant manipulator for teleoperated minimally invasive surgeries. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–4 June 2020. [Google Scholar]
- Zhang, X.; Wang, H.; Tian, Y.; Peyrodie, L.; Wang, X. Model-free based neural network control with time-delay estimation for lower extremity exoskeleton. Neurocomputing 2018, 272, 178–188. [Google Scholar] [CrossRef]








© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Li, J.; Ovur, S.E.; Chen, Z.; Li, X.; Hu, Z.; Hu, Y. Novel Design and Adaptive Fuzzy Control of a Lower-Limb Elderly Rehabilitation. Electronics 2020, 9, 343. https://doi.org/10.3390/electronics9020343
Zhang X, Li J, Ovur SE, Chen Z, Li X, Hu Z, Hu Y. Novel Design and Adaptive Fuzzy Control of a Lower-Limb Elderly Rehabilitation. Electronics. 2020; 9(2):343. https://doi.org/10.3390/electronics9020343
Chicago/Turabian StyleZhang, Xin, Jiehao Li, Salih Ertug Ovur, Ziyang Chen, Xiangnan Li, Zhenhuan Hu, and Yingbai Hu. 2020. "Novel Design and Adaptive Fuzzy Control of a Lower-Limb Elderly Rehabilitation" Electronics 9, no. 2: 343. https://doi.org/10.3390/electronics9020343
APA StyleZhang, X., Li, J., Ovur, S. E., Chen, Z., Li, X., Hu, Z., & Hu, Y. (2020). Novel Design and Adaptive Fuzzy Control of a Lower-Limb Elderly Rehabilitation. Electronics, 9(2), 343. https://doi.org/10.3390/electronics9020343