The Detection of Black Ice Accidents for Preventative Automated Vehicles Using Convolutional Neural Networks



Abstract
1. Introduction
2. Literature Review
2.1. Black Ice Detection Methods
2.2. Deep Learning Applications to Intelligent Transportation
2.3. Summary
3. Learning Environment Setting
3.1. Data Collecting and Preprocessing
3.1.1. Data Collection
- Data Collection
- 2.
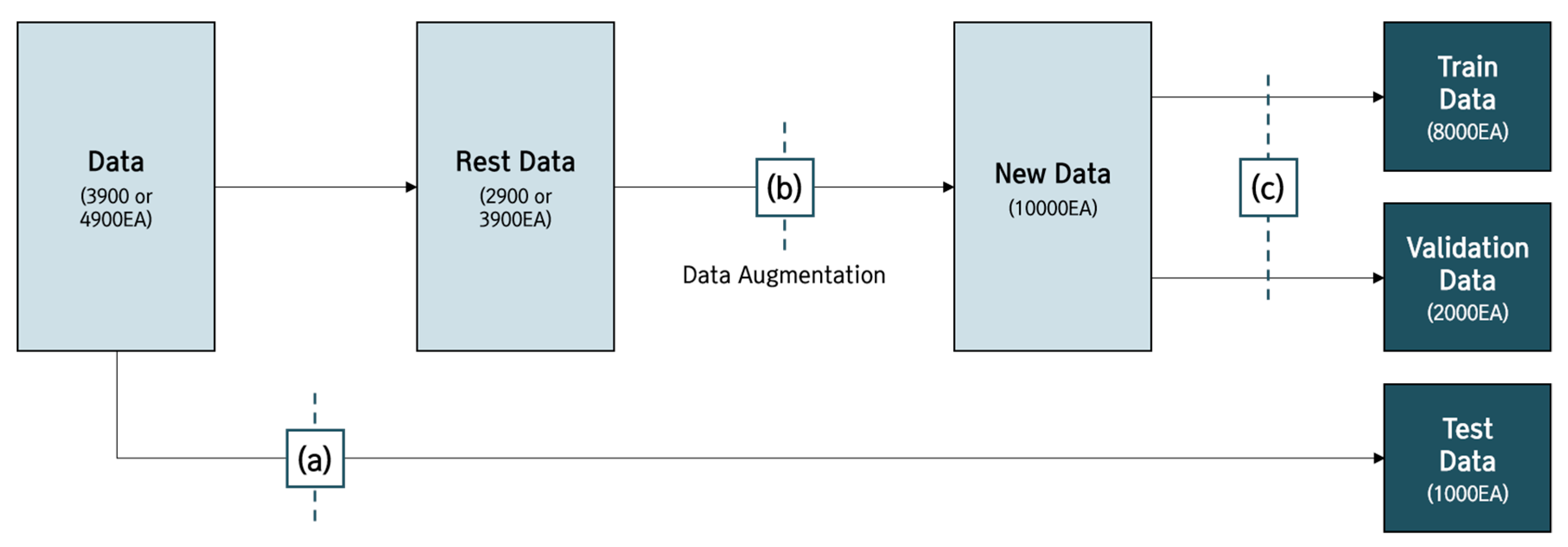
- Data Split
3.1.2. 1st Preprocessing
- Channel Setup
- 2.
- Data Padding
3.1.3. 2nd Preprocessing
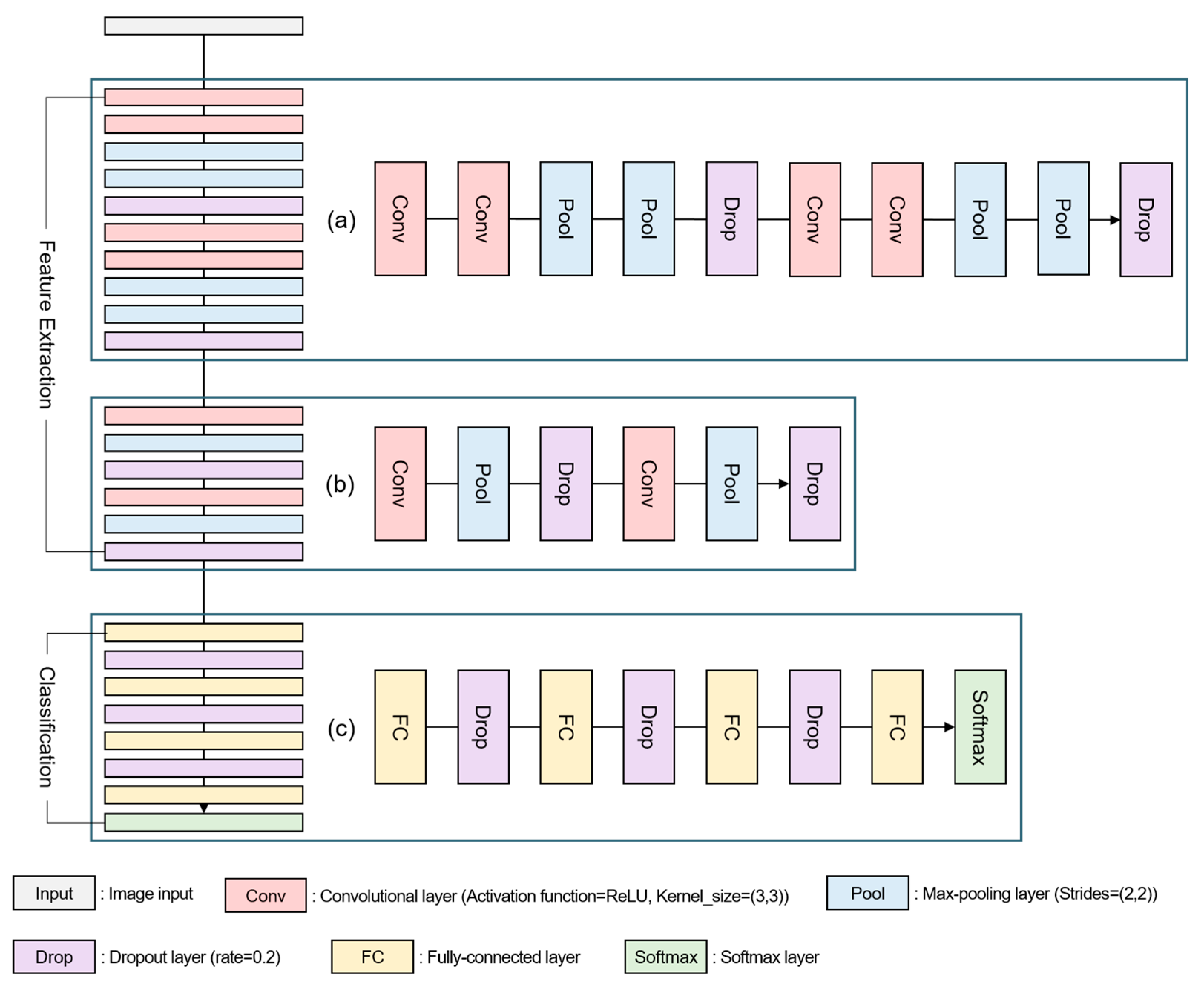
3.2. CNN Design and Learning
4. Result
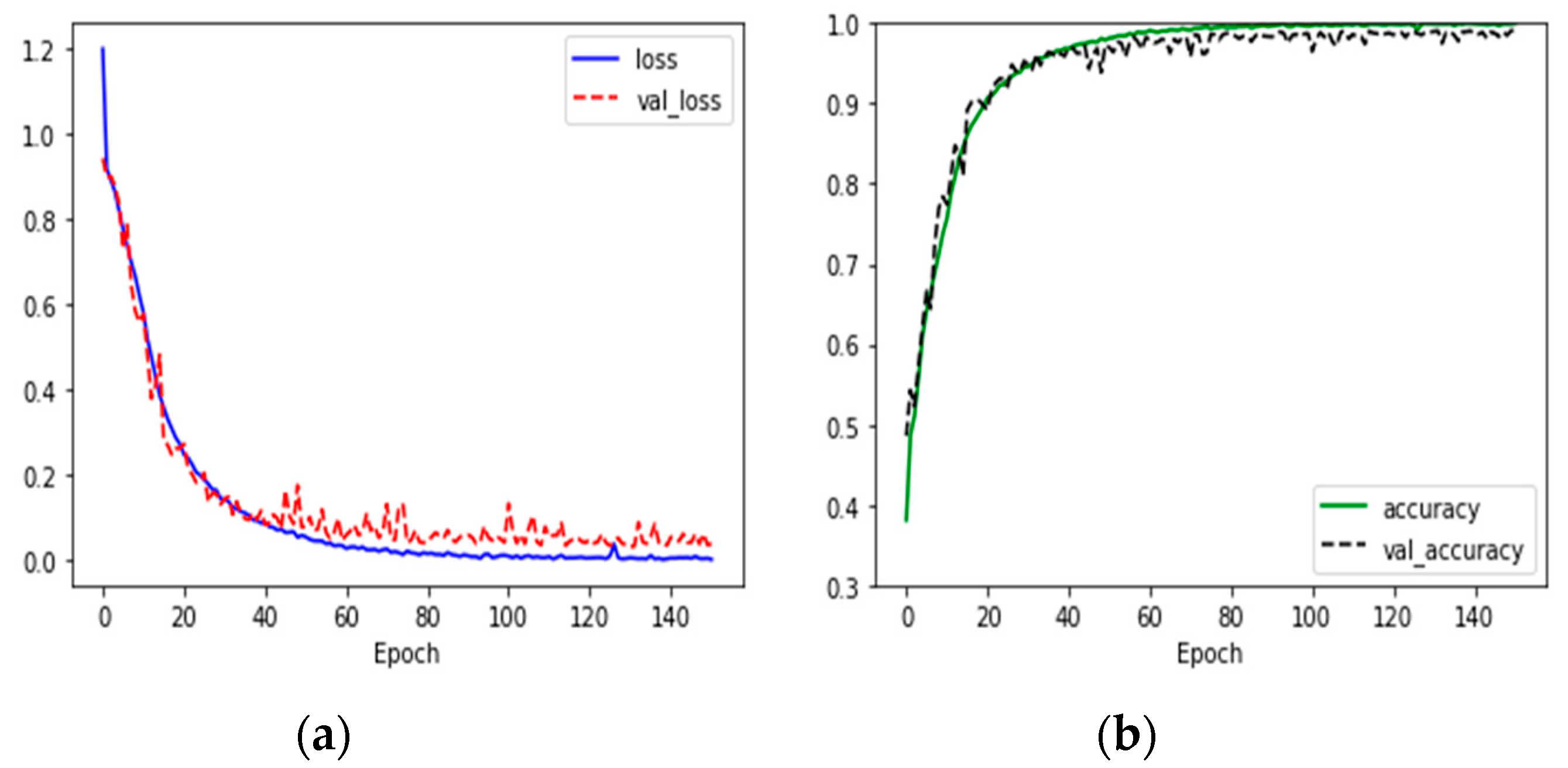
4.1. Result
4.2. Discussion
4.3. Application Method
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lee, K.; Jeon, S.; Kim, H.; Kum, D. Optimal path tracking control of autonomous vehicle: Adaptive full-state linear quadratic gaussian (lqg) control. IEEE Access 2019, 7, 109120–109133. [Google Scholar] [CrossRef]
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey (No. DOT HS 812 115); NHTSA’s National Center for Statistics and Analysis: Washington, DC, USA, 2015. [Google Scholar]
- Federal Ministry of Transport and Digital Infrastructure. Ethics Commission: Automated and Connected Driving; Federal Ministry of Transport and Digital Infrastructure: Berlin, Germany, 2017.
- National Highway Traffic Safety Administration. Federal Automated Vehicles Policy: Accelerating the Next Revolution in Roadway Safety; National Highway Traffic Safety Administration: Washington, DC, USA, 2016.
- Abraham, H.; Lee, C.; Brady, S.; Fitzgerald, C.; Mehler, B.; Reimer, B.; Coughlin, J.F. Autonomous vehicles and alternatives to driving: Trust, preferences, and effects of age. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Lin, R.; Zhang, W. The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 207–220. [Google Scholar] [CrossRef]
- Hartwich, F.; Witzlack, C.; Beggiato, M.; Krems, J.F. The first impression counts–A combined driving simulator and test track study on the development of trust and acceptance of highly automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 522–535. [Google Scholar] [CrossRef]
- Kim, K.; Kim, B.; Lee, K.; Ko, B.; Yi, K. Design of integrated risk management-based dynamic driving control of automated vehicles. IEEE Intell. Transp. Syst. Mag. 2017, 9, 57–73. [Google Scholar] [CrossRef]
- The NewYork Times Online. Available online: https://www.nytimes.com/2020/10/26/technology/driverless-cars.html (accessed on 3 December 2020).
- Tabatabai, H.; Aljuboori, M. A novel concrete-based sensor for detection of ice and water on roads and bridges. Sensors 2017, 17, 2912. [Google Scholar] [CrossRef]
- Alimasi, N.; Takahashi, S.; Enomoto, H. Development of a mobile optical system to detect road-freezing conditions. Bull. Glaciol. Res. 2012, 30, 41–51. [Google Scholar] [CrossRef][Green Version]
- Abdalla, Y.E.; Iqbal, M.T.; Shehata, M. Black Ice detection system using Kinect. In Proceedings of the IEEE 30th Canadian Conference on Electrical and Computer Engineering (CCECE), Windsor, ON, Canada, 30 April–3 May 2017; pp. 1–4. [Google Scholar]
- Minullin, R.G.; Mustafin, R.G.; Piskovatskii, Y.V.; Vedernikov, S.G.; Lavrent’ev, I.S. A detection technique for black ice and frost depositions on wires of a power transmission line by location sounding. Russ. Electr. Eng. 2011, 82, 541–543. [Google Scholar] [CrossRef]
- Gailius, D.; Jačėnas, S. Ice detection on a road by analyzing tire to road friction ultrasonic noise. Ultragarsas Ultrasound 2007, 62, 17–20. [Google Scholar]
- Ma, X.; Ruan, C. Method for black ice detection on roads using tri-wavelength backscattering measurements. Appl. Opt. 2020, 59, 7242–7246. [Google Scholar] [CrossRef]
- Han, J.; Koo, B.; Choi, K. Obstacle detection and recognition system for self-driving cars. Converg. Inf. Pap. 2017, 7, 229–235. (In Korean) [Google Scholar]
- Gao, H.; Cheng, B.; Wang, J.; Li, K.; Zhao, J.; Li, D. Object classification using CNN-based fusion of vision and LIDAR in autonomous vehicle environment. IEEE Trans. Ind. Inform. 2018, 14, 4224–4231. [Google Scholar] [CrossRef]
- Ammour, N.; Alhichri, H.; Bazi, Y.; Benjdira, B.; Alajlan, N.; Zuair, M. Deep learning approach for car detection in UAV imagery. Remote Sens. 2017, 9, 312. [Google Scholar] [CrossRef]
- Nafi’i, M.W.; Yuniarno, E.M.; Affandi, A. Vehicle Brands and Types Detection Using Mask R-CNN. In Proceedings of the International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 28–29 August 2019; pp. 422–427. [Google Scholar]
- Zhang, L.; Lin, L.; Liang, X.; He, K. Is faster R-CNN doing well for pedestrian detection? In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 443–457. [Google Scholar]
- Chen, Y.Y.; Jhong, S.Y.; Li, G.Y.; Chen, P.H. Thermal-based pedestrian detection using faster r-cnn and region decomposition branch. In Proceedings of the International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), Taipei, Taiwan, 3–6 December 2019; pp. 1–2. [Google Scholar]
- Ammar, A.; Koubaa, A.; Ahmed, M.; Saad, A. Aerial images processing for car detection using convolutional neural networks: Comparison between faster r-cnn and yolov3. arXiv 2019, arXiv:1910.07234. [Google Scholar]
- Benjdira, B.; Khursheed, T.; Koubaa, A.; Ammar, A.; Ouni, K. Car detection using unmanned aerial vehicles: Comparison between faster r-cnn and yolov3. In Proceedings of the 1st International Conference on Unmanned Vehicle Systems-Oman (UVS), Muscat, Oman, 5–7 February 2019; pp. 1–6. [Google Scholar]
- Xie, L.; Ahmad, T.; Jin, L.; Liu, Y.; Zhang, S. A new CNN-based method for multi-directional car license plate detection. IEEE Trans. Intell. Transp. Syst. 2018, 19, 507–517. [Google Scholar] [CrossRef]
- Yu, Y.; Jin, Q.; Chen, C.W. FF-CMnet: A CNN-based model for fine-grained classification of car models based on feature fusion. In Proceedings of the IEEE International Conference on Multimedia and Expo (ICME), San Diego, CA, USA, 23–27 July 2018; pp. 1–6. [Google Scholar]
- Putra, M.H.; Yussof, Z.M.; Lim, K.C.; Salim, S.I. Convolutional neural network for person and car detection using yolo framework. J. Telecommun. Electron. Comput. Eng. 2018, 10, 67–71. [Google Scholar]
- Zhu, Z.; Liang, D.; Zhang, S.; Huang, X.; Li, B.; Hu, S. Traffic-sign detection and classification in the wild. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2110–2118. [Google Scholar]
- Vennelakanti, A.; Shreya, S.; Rajendran, R.; Sarkar, D.; Muddegowda, D.; Hanagal, P. Traffic sign detection and recognition using a cnn ensemble. In Proceedings of the IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 11–13 January 2019; pp. 1–4. [Google Scholar]
- Alghmgham, D.A.; Latif, G.; Alghazo, J.; Alzubaidi, L. Autonomous traffic sign (ATSR) detection and recognition using deep CNN. Procedia Comput. Sci. 2019, 163, 266–274. [Google Scholar] [CrossRef]
- Peemen, M.; Mesman, B.; Corporaal, H. Speed sign detection and recognition by convolutional neural networks. In Proceedings of the 8th International Automotive Congress, Eindhoven, The Netherlands, 16–17 May 2011; pp. 162–170. [Google Scholar]
- Malbog, M.A. MASK R-CNN for Pedestrian Crosswalk Detection and Instance Segmentation. In Proceedings of the IEEE 6th International Conference on Engineering Technologies and Applied Sciences (ICETAS), Kuala Lumpur, Malaysia, 20–21 December 2019; pp. 1–5. [Google Scholar]
- Tabernik, D.; Skočaj, D. Deep learning for large-scale traffic-sign detection and recognition. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1427–1440. [Google Scholar] [CrossRef]
- Kukreja, R.; Rinchen, S.; Vaidya, B.; Mouftah, H.T. Evaluating Traffic Signs Detection using Faster R-CNN for Autonomous driving. In Proceedings of the IEEE 25th International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Pisa, Italy, 14–16 September 2020; pp. 1–6. [Google Scholar]
- Boujemaa, K.S.; Berrada, I.; Bouhoute, A.; Boubouh, K. Traffic sign recognition using convolutional neural networks. In Proceedings of the International Conference on Wireless Networks and Mobile Communications (WINCOM), Rabat, Morocco, 1–4 November 2017; pp. 1–6. [Google Scholar]
- Qian, R.; Liu, Q.; Yue, Y.; Coenen, F.; Zhang, B. Road surface traffic sign detection with hybrid region proposal and fast R-CNN. In Proceedings of the 12th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), Changsha, China, 13–15 August 2016; pp. 555–559. [Google Scholar]
- Shustanov, A.; Yakimov, P. CNN design for real-time traffic sign recognition. Procedia Eng. 2017, 201, 718–725. [Google Scholar] [CrossRef]
- Lee, H.S.; Kim, K. Simultaneous traffic sign detection and boundary estimation using convolutional neural network. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1652–1663. [Google Scholar] [CrossRef]
- Carrillo, J.; Crowley, M.; Pan, G.; Fu, L. Design of Efficient Deep Learning models for Determining Road Surface Condition from Roadside Camera Images and Weather Data. arXiv 2020, arXiv:2009.10282. [Google Scholar]
- Pan, G.; Muresan, M.; Yu, R.; Fu, L. Real-time Winter Road Surface Condition Monitoring Using an Improved Residual CNN. Can. J. Civ. Eng. 2020. [Google Scholar] [CrossRef]
- Singh, J.; Shekhar, S. Road damage detection and classification in smartphone captured images using mask r-cnn. arXiv 2018, arXiv:1811.04535. [Google Scholar]
- Tong, Z.; Gao, J.; Han, Z.; Wang, Z. Recognition of asphalt pavement crack length using deep convolutional neural networks. Road Mater. Pavement Des. 2018, 19, 1334–1349. [Google Scholar] [CrossRef]
- Li, B.; Wang, K.C.; Zhang, A.; Yang, E.; Wang, G. Automatic classification of pavement crack using deep convolutional neural network. Int. J. Pavement Eng. 2020, 21, 457–463. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Choubisa, T.; Kashyap, M.; Chaitanya, K.K. Human Crawl vs Animal Movement and Person with Object Classifications Using CNN for Side-view Images from Camera. In Proceedings of the International Conference on Advances in Computing, Communications and Informatics (ICACCI), Bangalore, India, 19–22 September 2018; pp. 48–54. [Google Scholar]
- Keras. Available online: https://keras.io/ (accessed on 11 November 2020).
- Nair, V.; Hinton, G.E. Rectified linear units improve restricted boltzmann machines. In Proceedings of the 27th International Conference on International Conference on Machine Learning, Haifa, Israel, 21–24 June 2010. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Gadd, M.; Newman, P. A framework for infrastructure-free warehouse navigation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 3271–3278. [Google Scholar]
- Tourani, S.; Desai, D.; Parihar, U.S.; Garg, S.; Sarvadevabhatla, R.K.; Krishna, K.M. Early Bird: Loop Closures from Opposing Viewpoints for Perceptually-Aliased Indoor Environments. arXiv 2020, arXiv:2010.01421. [Google Scholar]
- Chen, X.; Vempati, A.S.; Beardsley, P. Streetmap-mapping and localization on ground planes using a downward facing camera. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1672–1679. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
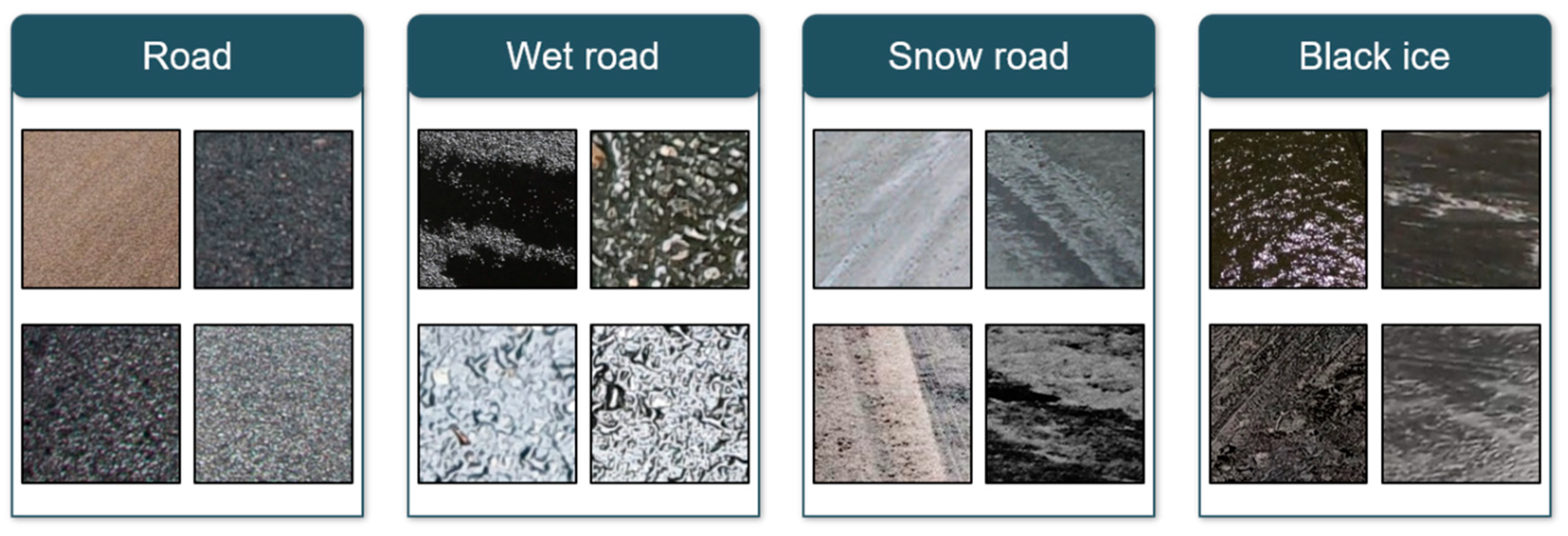
| Road | Wet Road | Snow Road | Black Ice | Total | |
|---|---|---|---|---|---|
| Number | 730 | 610 | 570 | 320 | 2230 |
| 256 × 256 px | 128 × 128 px | |
|---|---|---|
| Advantage | Easy to identify image characteristics | Large number of images Deep neural network can be implemented |
| Disadvantage | Small number of images Unable to implement deep neural network | Hard to identify image characteristics |
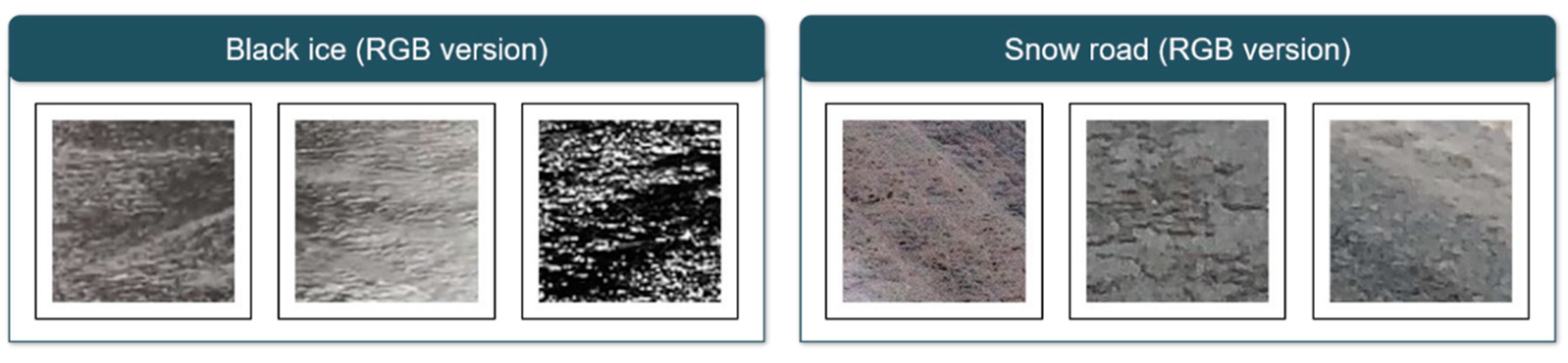
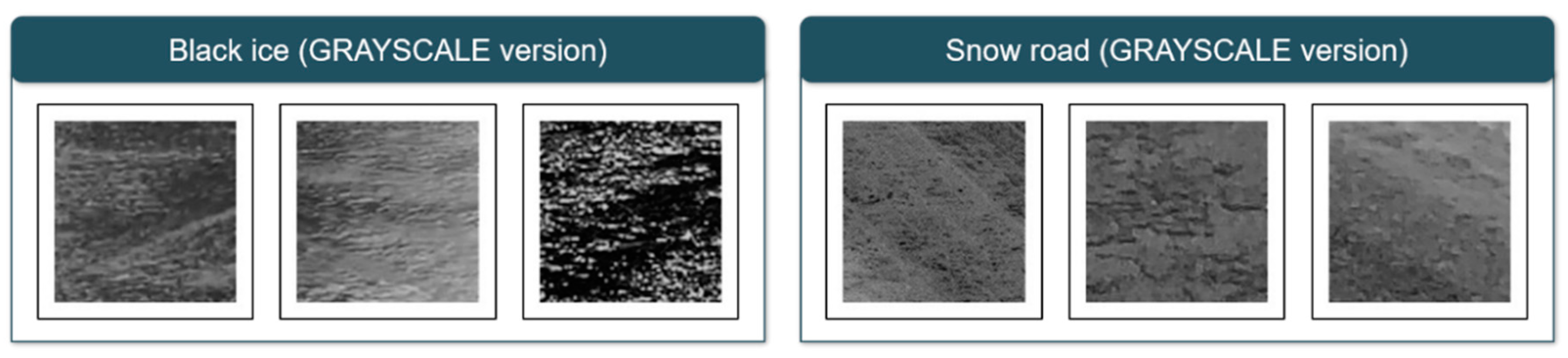
| RGB | GRAYSCALE (Black and White) | |
|---|---|---|
| Number of Channels | 3 Channels | 1 Channel |
| Feature | Large data size | Small data size |
| Advantage | Easy to identify image characteristics | No limit on the number of learning data Deep neural networks can be implemented |
| Disadvantage | Limited number of learning data Deep neural network impossible to implement | Hard to identify image characteristics |
| Original Data | Padding Data | ||
|---|---|---|---|
| Data augmentation results |  |  | |
| Learning results | Loss | 1.39 | 0.26 |
| Accuracy | 0.253 | 0.891 | |
| Class | Size | Number |
|---|---|---|
| Road | 150 × 150 px | 4900 |
| Wet road | 4900 | |
| Snow road | 3900 | |
| Black ice | 3900 | |
| Total | 17,600 | |
| Transformation Type | Value |
|---|---|
| Rotation | 20 |
| Width shift | 0.15 |
| Height shift | 0.15 |
| Zoom | 0.1 |
| Class | Train Data | Validation Data | Test Data | Total |
|---|---|---|---|---|
| Road | 8000 | 2000 | 1000 | 11,000 |
| Wet road | ||||
| Snow road | ||||
| Black ice |
| Class | Value |
|---|---|
| Activation Function | ReLU |
| Kernel size | (3,3) |
| Strides | (2,2) |
| Dropout rate | 0.2 |
| Optimizer | SGD |
| Epoch | 200 |
| Batch size | 32 |
| Earlystopping | 20 |
| Class | Loss | Accuracy |
|---|---|---|
| Train | 0.008 | 0.998 |
| Test | 0.097 | 0.982 |
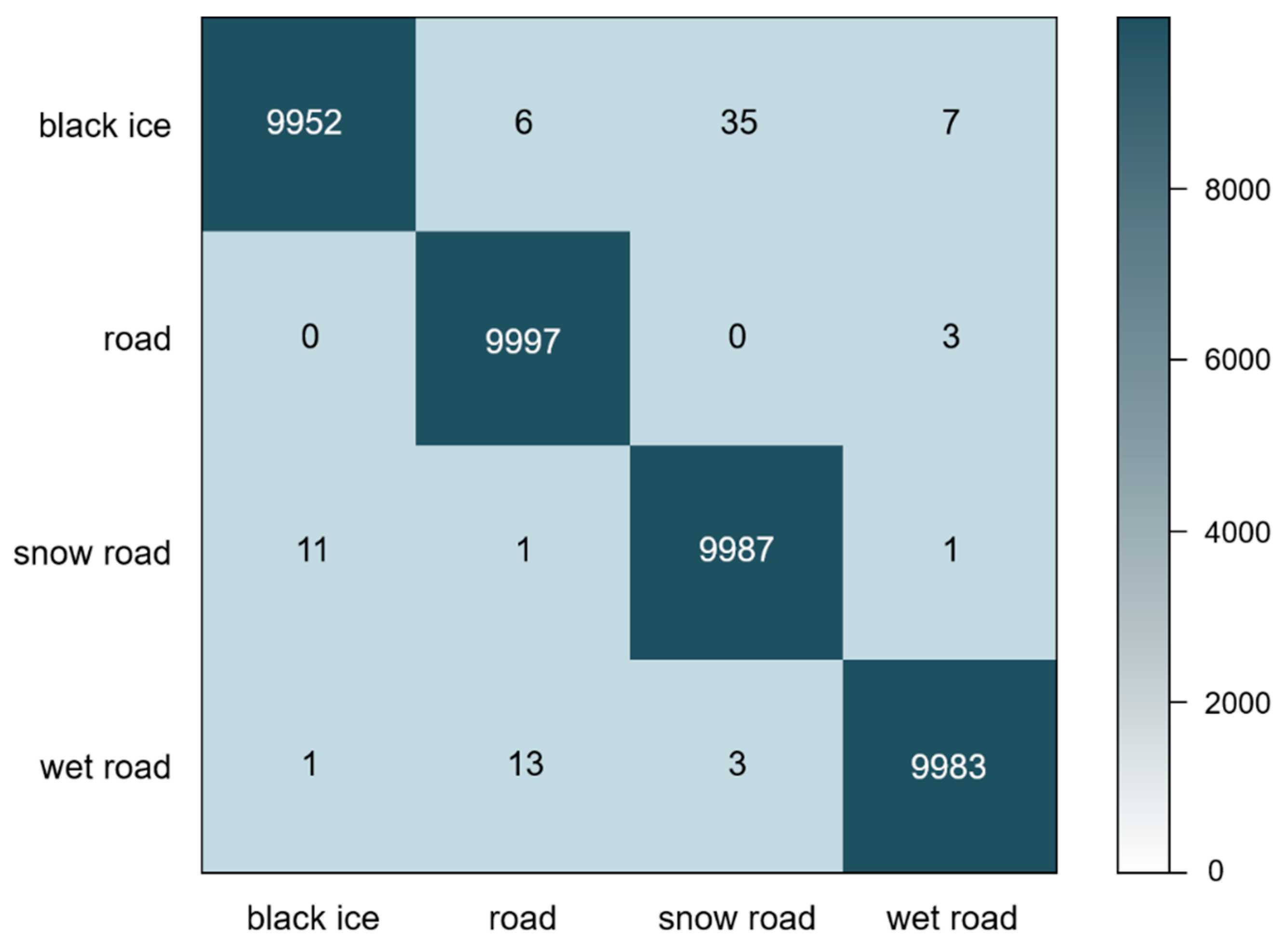
| Class | Accuracy | Precision | Recall |
|---|---|---|---|
| Road | 0.996 | 0.99 | 1.00 |
| Wet road | 0.989 | 0.99 | 0.99 |
| Snow road | 0.981 | 0.97 | 0.98 |
| Black ice | 0.961 | 0.98 | 0.96 |
| Average | 0.982 | 0.983 | 0.983 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.; Kang, M.; Song, J.; Hwang, K. The Detection of Black Ice Accidents for Preventative Automated Vehicles Using Convolutional Neural Networks. Electronics 2020, 9, 2178. https://doi.org/10.3390/electronics9122178
Lee H, Kang M, Song J, Hwang K. The Detection of Black Ice Accidents for Preventative Automated Vehicles Using Convolutional Neural Networks. Electronics. 2020; 9(12):2178. https://doi.org/10.3390/electronics9122178
Chicago/Turabian StyleLee, Hojun, Minhee Kang, Jaein Song, and Keeyeon Hwang. 2020. "The Detection of Black Ice Accidents for Preventative Automated Vehicles Using Convolutional Neural Networks" Electronics 9, no. 12: 2178. https://doi.org/10.3390/electronics9122178
APA StyleLee, H., Kang, M., Song, J., & Hwang, K. (2020). The Detection of Black Ice Accidents for Preventative Automated Vehicles Using Convolutional Neural Networks. Electronics, 9(12), 2178. https://doi.org/10.3390/electronics9122178