Evolutionary Game for Content Cache in a mm-Wave-Based Vehicular Fog


Abstract
1. Introduction
2. Related Works
2.1. Vehicular Fog and Coded Cache
2.2. mm-Wave Communications
2.3. mm-Wave V2X Communications
3. mm-Wave-Based Vehicular Communication Model
3.1. mm-Wave Channel Propagation
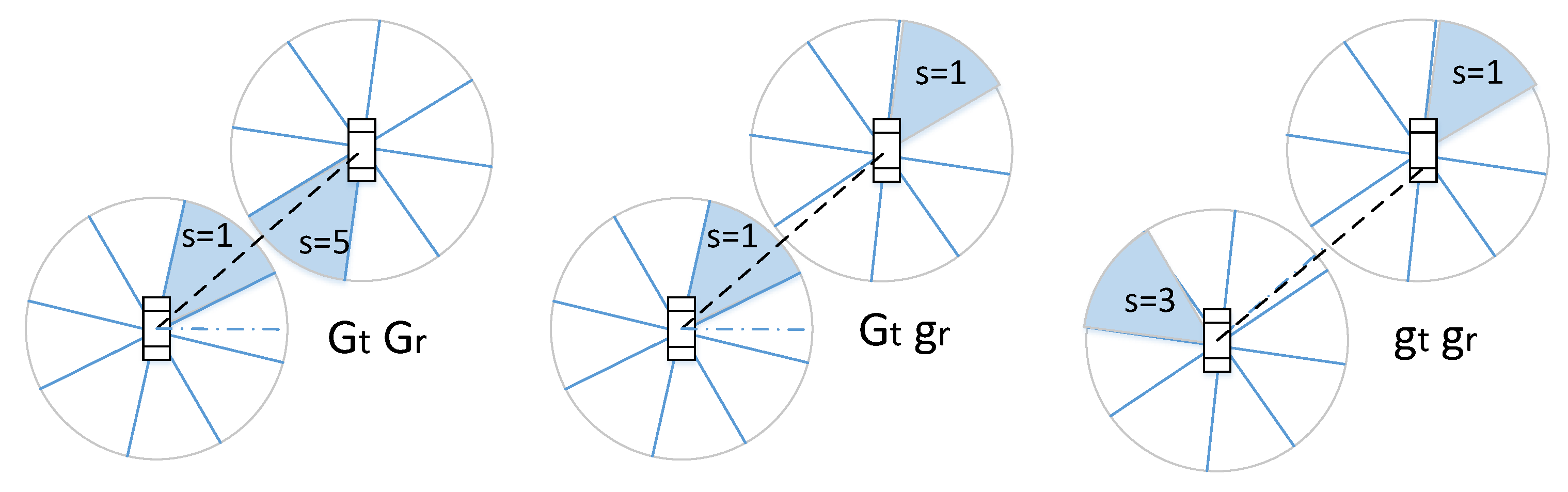
3.2. Directional Antenna and Coverage
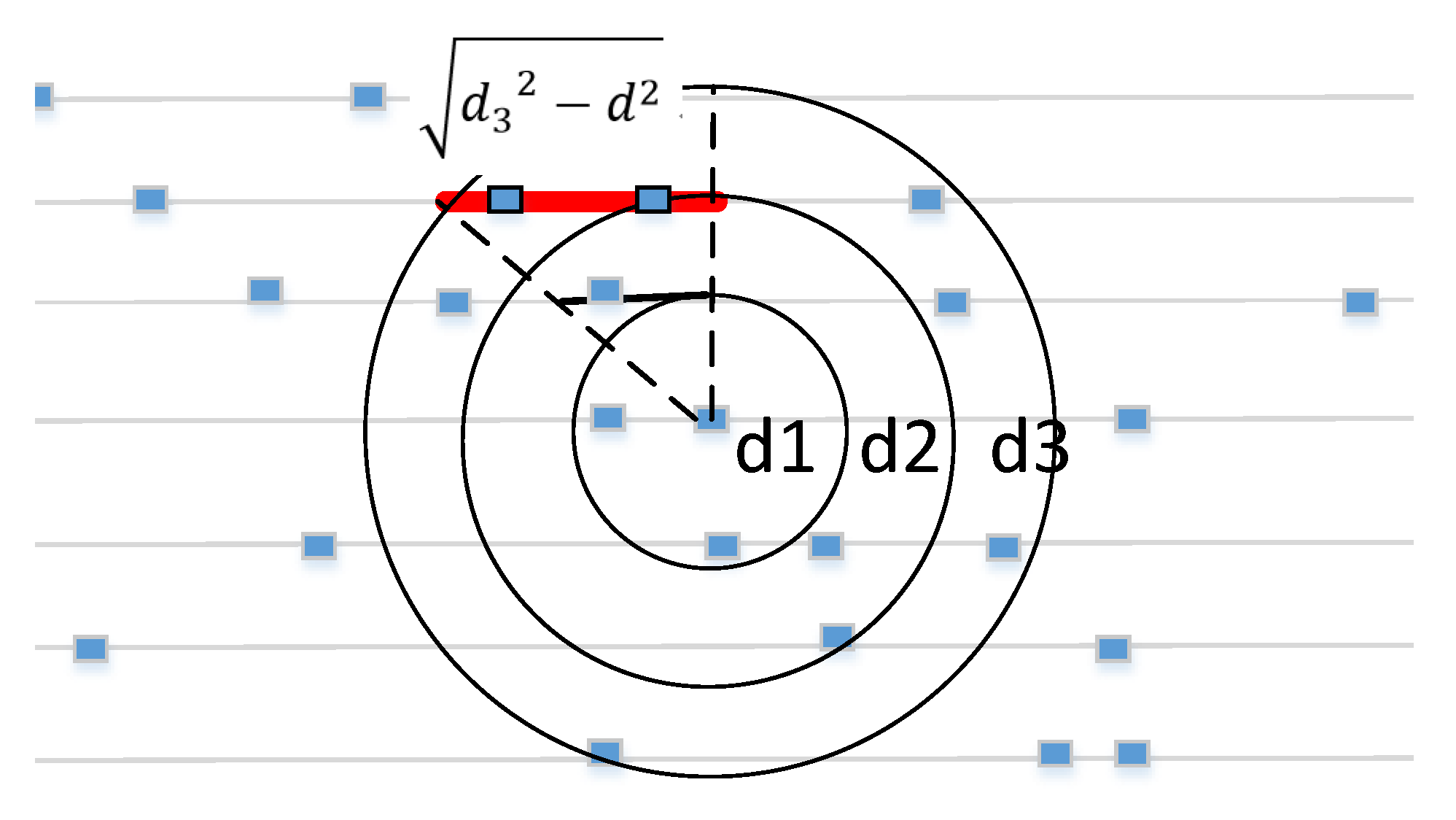
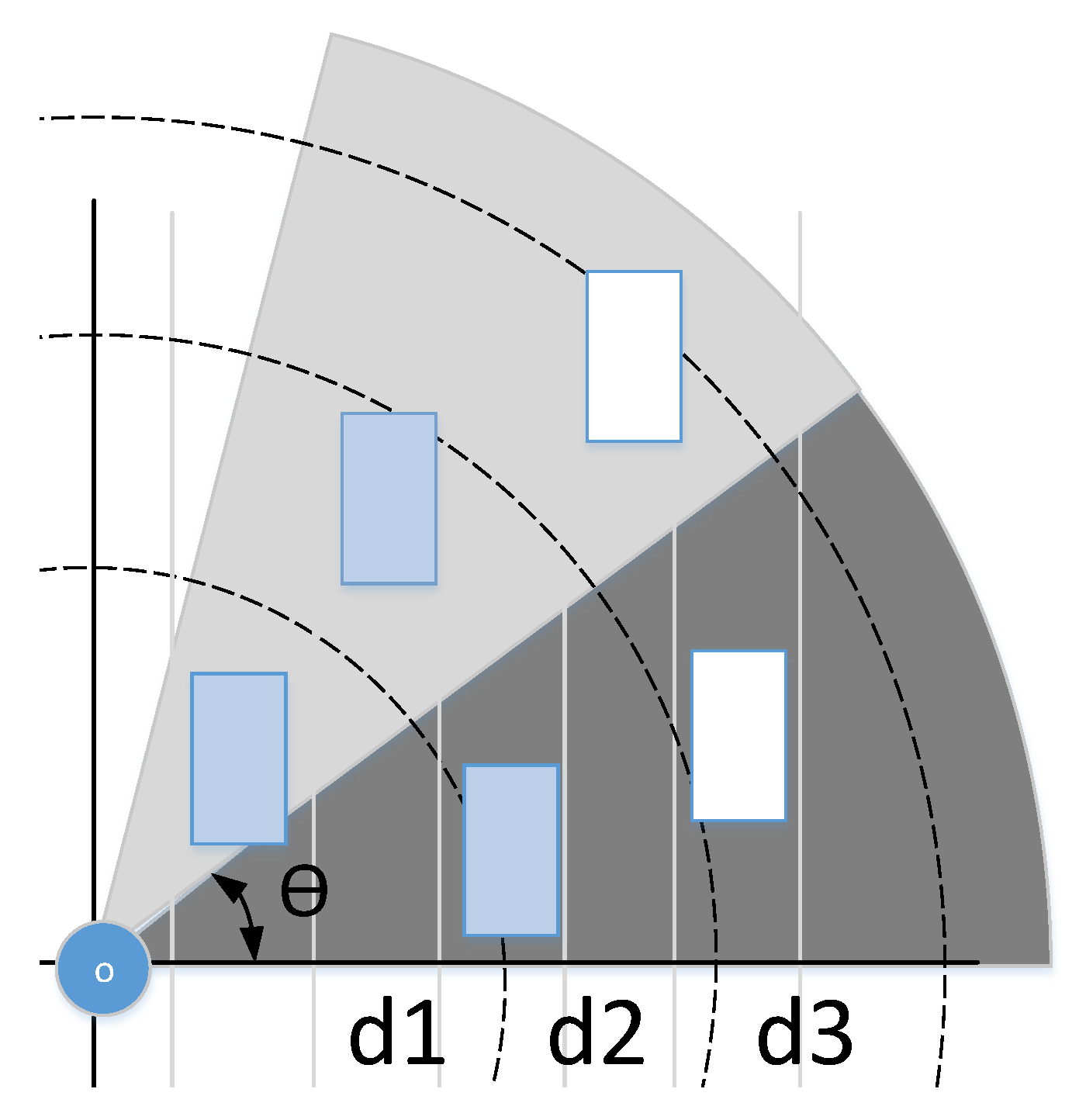
3.3. Multi-Lane Road Model
- Number of neighbor vehicles in area : both vehicles can have connection regardless of beam direction.where d is distance from an origin node which is calculated by number of lanes (i.e., , i-th lane with lane width ).
- Number of neighbor vehicles in area : there are two cases of connectivity in the region, or .
- Number of neighbor vehicles in area : both Tx and Rx antennae have beam directions toward each other.
3.4. Blockage Probability
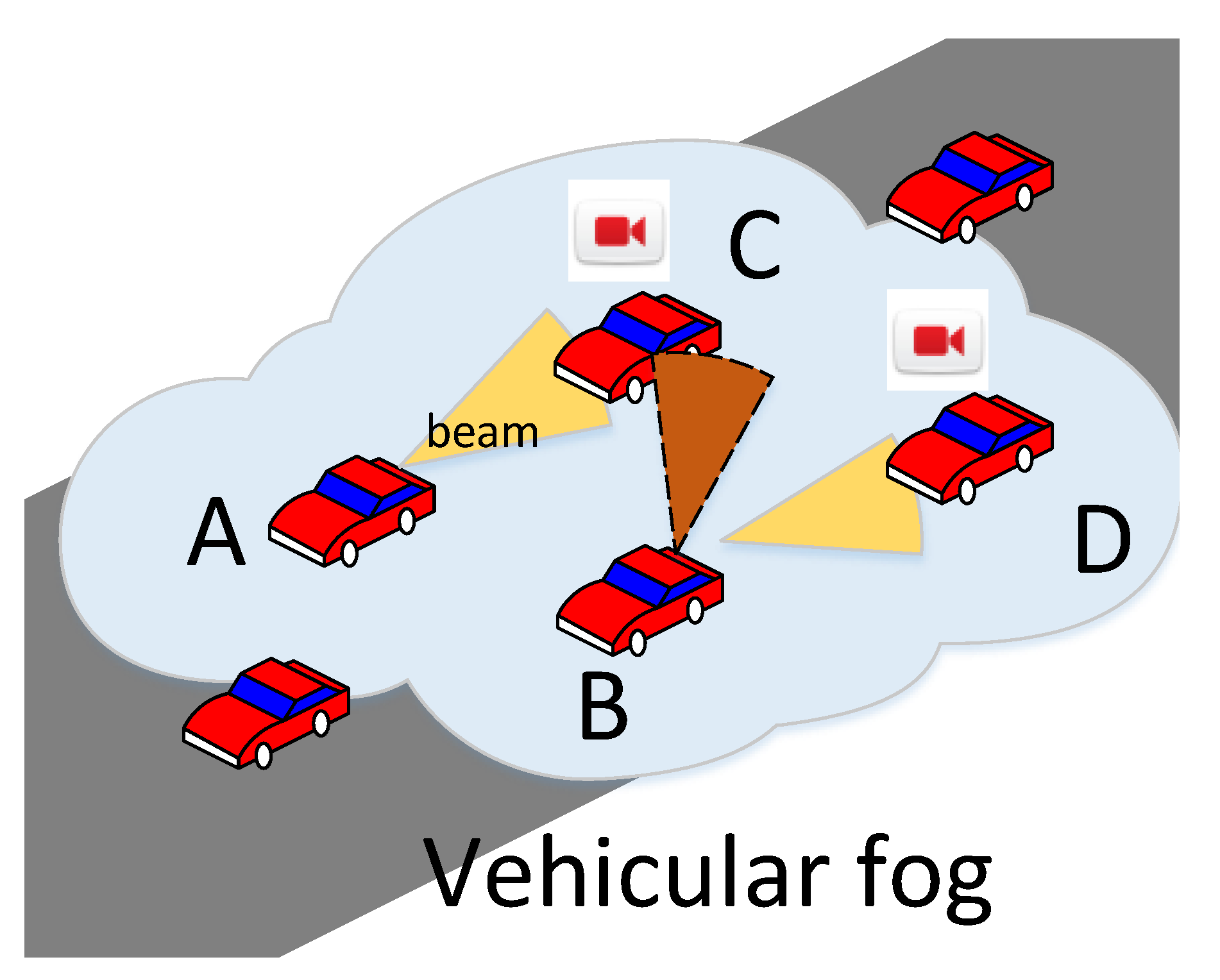
3.5. Beam Direction and Content Cache
3.6. Connectivity Probability
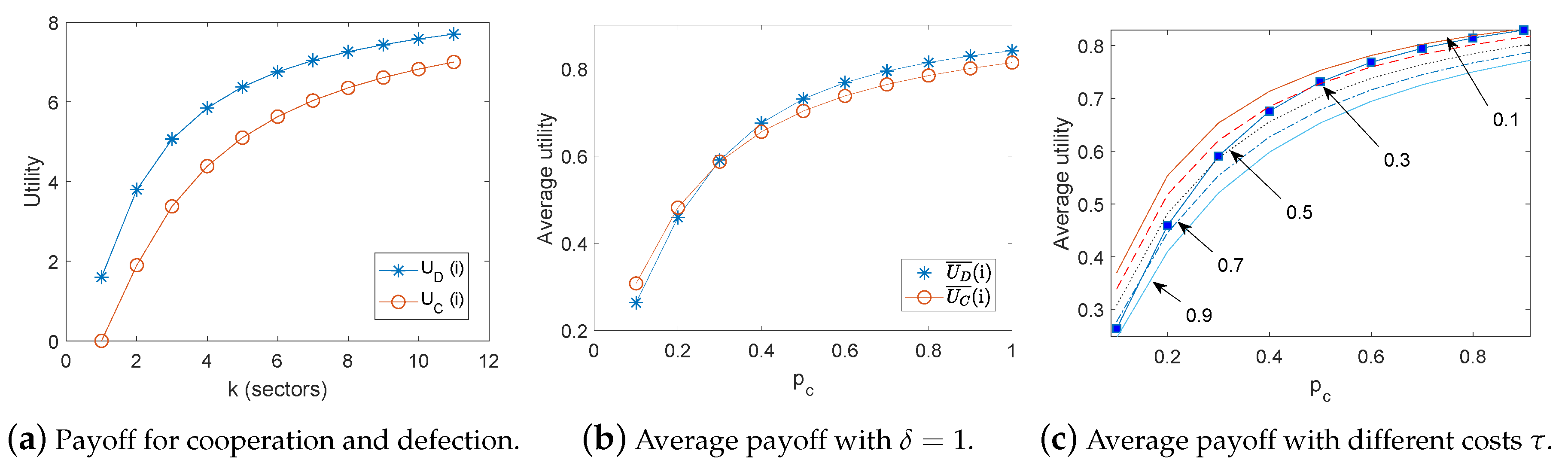
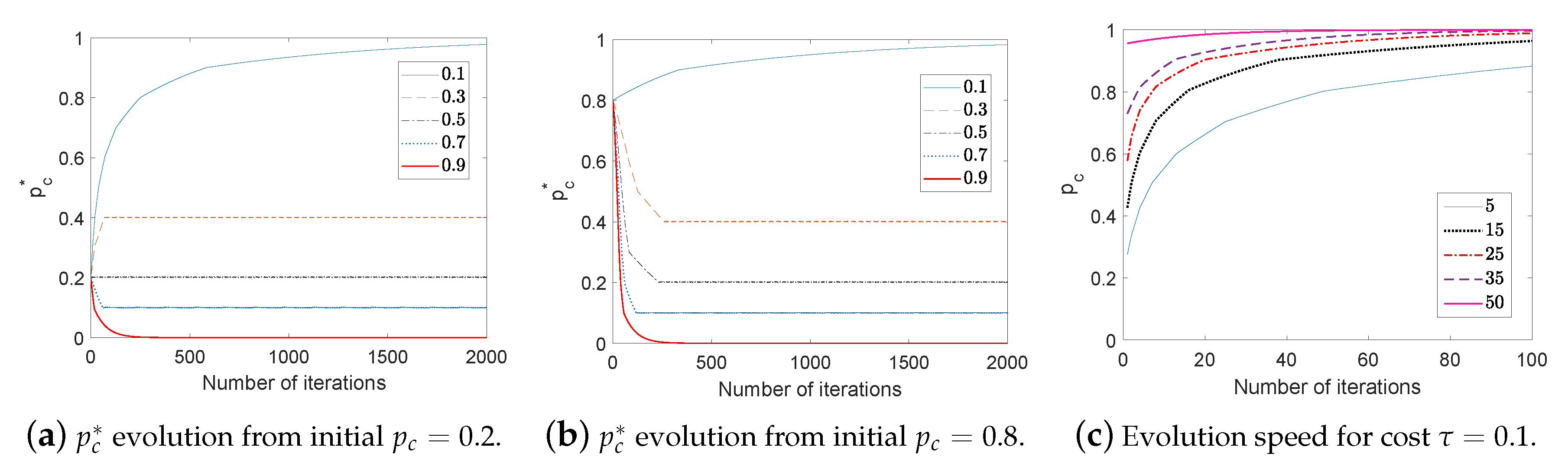
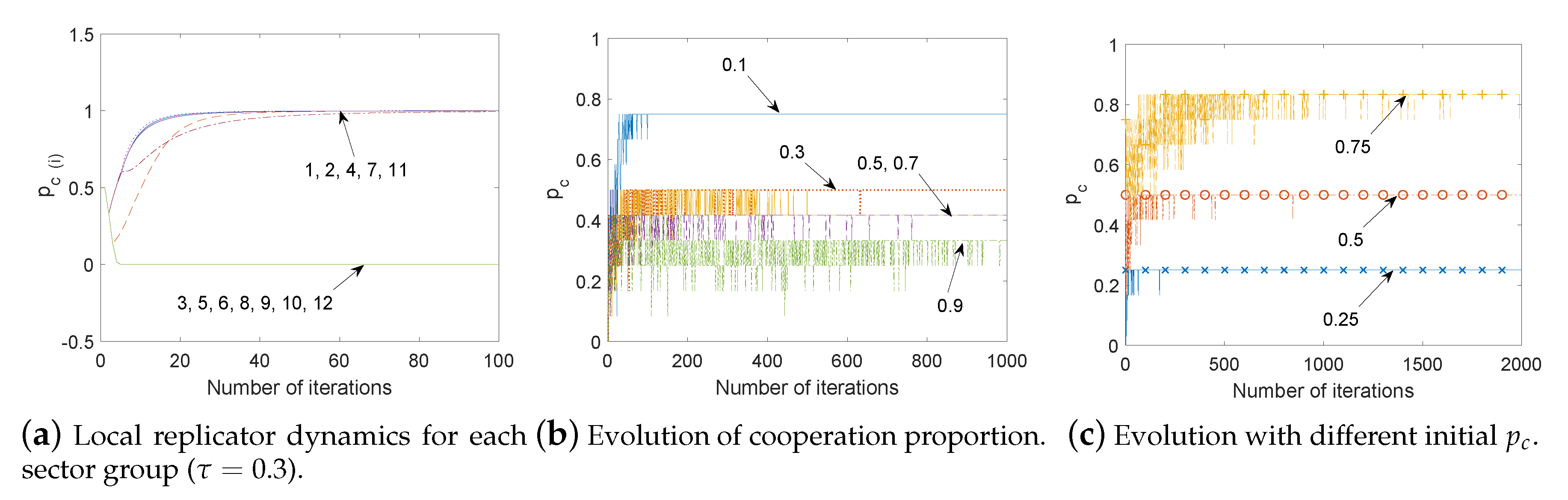
4. Evolutionary Content Cache Game
5. Experiments
6. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Kim, W. MC-GiV2V: Multichannel Allocation in mmWave-Based Vehicular Ad Hoc Networks. Wirel. Commun. Mob. Comput. 2018, 2018, 2753025. [Google Scholar] [CrossRef]
- 3GPP. TR 37.885, Technical Specification Group Radio Access Networks, Study on Evaluation Methodology of New Vehicle-to-Everything (V2X) Use Cases for LET and NR, Rel. 16; Sophia-Antipolis: Valbonne, France, 2018. [Google Scholar]
- Petrov, V.; Kokkoniemi, J.; Moltchanov, D.; Lehtomäki, J.; Juntti, M.; Koucheryavy, Y. The impact of interference from the side lanes on mmWave/THz band V2V communication systems with directional antennas. IEEE Trans. Veh. Technol. 2018, 67, 5028–5041. [Google Scholar] [CrossRef]
- Zhou, P.; Fang, X.; Wang, X.; Long, Y.; He, R.; Han, X. Deep learning-based beam management and interference coordination in dense mmWave networks. IEEE Trans. Veh. Technol. 2018, 68, 592–603. [Google Scholar] [CrossRef]
- Gerla, M.; Lee, E.K.; Pau, G.; Lee, U. Internet of vehicles: From intelligent grid to autonomous cars and vehicular clouds. In Proceedings of the 2014 IEEE World Forum on Internet of Things (WF-IoT), Seoul, Korea, 6–8 March 2014; pp. 241–246. [Google Scholar]
- Nguyen, T.D.; Yang, L.L.; Hanzo, L. Systematic Luby transform codes and their soft decoding. In Proceedings of the 2007 IEEE Workshop on Signal Processing Systems, Shanghai, China, 17–19 October 2007; pp. 67–72. [Google Scholar]
- Shokrollahi, A. Raptor codes. IEEE Trans. Inf. Theory 2006, 52, 2551–2567. [Google Scholar] [CrossRef]
- Shojafar, M.; Cordeschi, N.; Baccarelli, E. Energy-efficient adaptive resource management for real-time vehicular cloud services. IEEE Trans. Cloud Comput. 2016, 7, 196–209. [Google Scholar] [CrossRef]
- Zheng, K.; Meng, H.; Chatzimisios, P.; Lei, L.; Shen, X. An SMDP-based resource allocation in vehicular cloud computing systems. IEEE Trans. Ind. Electron. 2015, 62, 7920–7928. [Google Scholar]
- Yu, R.; Zhang, Y.; Gjessing, S.; Xia, W.; Yang, K. Toward cloud-based vehicular networks with efficient resource management. IEEE Netw. 2013, 27, 48–55. [Google Scholar] [CrossRef]
- Lee, E.; Lee, E.K.; Gerla, M.; Oh, S.Y. Vehicular cloud networking: Architecture and design principles. IEEE Commun. Mag. 2014, 52, 148–155. [Google Scholar] [CrossRef]
- Ahlgren, B.; Dannewitz, C.; Imbrenda, C.; Kutscher, D.; Ohlman, B. A survey of information-centric networking. IEEE Commun. Mag. 2012, 50, 26–36. [Google Scholar] [CrossRef]
- Xylomenos, G.; Ververidis, C.N.; Siris, V.A.; Fotiou, N.; Tsilopoulos, C.; Vasilakos, X.; Katsaros, K.V.; Polyzos, G.C. A survey of information-centric networking research. IEEE Commun. Surv. Tutor. 2013, 16, 1024–1049. [Google Scholar] [CrossRef]
- Zhang, M.; Luo, H.; Zhang, H. A survey of caching mechanisms in information-centric networking. IEEE Commun. Surv. Tutor. 2015, 17, 1473–1499. [Google Scholar] [CrossRef]
- Kim, W. Beyond LTE-advance for information centric networking. Comput. Stand. Interfaces 2017, 49, 59–66. [Google Scholar] [CrossRef]
- Bouk, S.H.; Ahmed, S.H.; Kim, D. Vehicular content centric network (VCCN) a survey and research challenges. In Proceedings of the 30th Annual ACM Symposium on Applied Computing, Salamanca, Spain, 13–17 April 2015; pp. 695–700. [Google Scholar]
- Wang, Y.; Li, Z.; Tyson, G.; Uhlig, S.; Xie, G. Optimal cache allocation for content-centric networking. In Proceedings of the 2013 21st IEEE International Conference on Network Protocols (ICNP), Goettingen, Germany, 7–10 October 2013; pp. 1–10. [Google Scholar]
- Zhang, Y.; Tan, X.; Li, W. PPC: Popularity prediction caching in ICN. IEEE Commun. Lett. 2017, 22, 5–8. [Google Scholar] [CrossRef]
- Montpetit, M.J.; Westphal, C.; Trossen, D. Network coding meets information-centric networking: An architectural case for information dispersion through native network coding. In Proceedings of the 1st ACM Workshop on Emerging Name-Oriented Mobile Networking Design-Architecture, Algorithms, and Applications, Hilton Head, SC, USA, 11–14 June 2012; pp. 31–36. [Google Scholar]
- Liu, W.X.; Yu, S.Z.; Zhu, P.Y. Multisource Dissemination in content-centric networking. In Proceedings of the 2013 Fourth International Conference on the Network of the Future (NoF), Pohang, Korea, 23–25 October 2013; pp. 1–5. [Google Scholar]
- Wang, J.; Ren, J.; Lu, K.; Wang, J.; Liu, S.; Westphal, C. An optimal cache management framework for information-centric networks with network coding. In Proceedings of the 2014 IFIP Networking Conference, Trondheim, Norway, 2–4 June 2014; pp. 1–9. [Google Scholar]
- Maddah-Ali, M.A.; Niesen, U. Decentralized coded caching attains order-optimal memory-rate tradeoff. IEEE/ACM Trans. Netw. 2014, 23, 1029–1040. [Google Scholar] [CrossRef]
- Amiri, M.M.; Yang, Q.; Gündüz, D. Decentralized coded caching with distinct cache capacities. In Proceedings of the 2016 50th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 6–9 November 2016; pp. 734–738. [Google Scholar]
- Luo, T.; Aggarwal, V.; Peleato, B. Coded caching with distributed storage. IEEE Trans. Inf. Theory 2019, 65, 7742–7755. [Google Scholar] [CrossRef]
- Mital, N.; Gündüz, D.; Ling, C. Coded caching in a multi-server system with random topology. IEEE Trans. Commun. 2020, 68, 4620–4631. [Google Scholar] [CrossRef]
- Wang, P.; Li, Y.; Song, L.; Vucetic, B. Multi-gigabit millimeter wave wireless communications for 5G: From fixed access to cellular networks. IEEE Commun. Mag. 2015, 53, 168–178. [Google Scholar] [CrossRef]
- Dehos, C.; González, J.L.; De Domenico, A.; Ktenas, D.; Dussopt, L. Millimeter-wave access and backhauling: The solution to the exponential data traffic increase in 5G mobile communications systems? IEEE Commun. Mag. 2014, 52, 88–95. [Google Scholar] [CrossRef]
- Zola, E.; Kassler, A.J.; Kim, W. Joint user association and energy aware routing for green small cell mmWave backhaul networks. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar]
- Hilt, A. Availability and Fade Margin Calculations for 5G Microwave and Millimeter-Wave Anyhaul Links. Appl. Sci. 2019, 9, 5240. [Google Scholar] [CrossRef]
- Rappaport, T.S.; Sun, S.; Mayzus, R.; Zhao, H.; Azar, Y.; Wang, K.; Wong, G.N.; Schulz, J.K.; Samimi, M.; Gutierrez, F. Millimeter wave mobile communications for 5G cellular: It will work! IEEE Access 2013, 1, 335–349. [Google Scholar] [CrossRef]
- Sun, S.; MacCartney, G.R.; Samimi, M.K.; Nie, S.; Rappaport, T.S. Millimeter wave multi-beam antenna combining for 5G cellular link improvement in New York City. In Proceedings of the 2014 IEEE International Conference on Communications (ICC), Sydney, Australia, 10–14 June 2014; pp. 5468–5473. [Google Scholar]
- MacCartney, G.R.; Rappaport, T.S. 73 GHz millimeter wave propagation measurements for outdoor urban mobile and backhaul communications in New York City. In Proceedings of the 2014 IEEE International Conference on Communications (ICC), Sydney, Australia, 10–14 June 2014; pp. 4862–4867. [Google Scholar]
- IEEE Std 802.15.3c-2009. Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for High Rate Wireless Personal Area Networks (WPANs); IEEE Standards Association Press: Piscataway, NJ, USA, 2009; Volume 49, pp. 114–121. [Google Scholar]
- IEEE. Part11: Wireless LAN Medium Acess Control (MAC) and Physical Layer (PHY) Specifications C Amendment 5: Enhancements for Very High Throughput in the 60 GHz Band. IEEE P802.11ad/D1.0; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Chen, Q.; Peng, X.; Yang, J.; Chin, F. Spatial reuse strategy in mmWave WPANs with directional antennas. In Proceedings of the 2012 IEEE Global Communications Conference (GLOBECOM), Anaheim, CA, USA, 3–7 December 2012; pp. 5392–5397. [Google Scholar]
- Son, I.K.; Mao, S.; Gong, M.X.; Li, Y. On frame-based scheduling for directional mmWave WPANs. In Proceedings of the 2012 Proceedings IEEE INFOCOM, Orlando, FL, USA, 25–30 March 2012; pp. 2149–2157. [Google Scholar] [CrossRef]
- Singh, S.; Mudumbai, R.; Madhow, U. Distributed coordination with deaf neighbors: Efficient medium access for 60 GHz mesh networks. In Proceedings of the 2010 Proceedings IEEE INFOCOM, San Diego, CA, USA, 14–19 March 2010; pp. 1–9. [Google Scholar]
- Shihab, E.; Cai, L.; Pan, J. A distributed asynchronous directional-to-directional MAC protocol for wireless ad hoc networks. IEEE Trans. Veh. Technol. 2009, 58, 5124–5134. [Google Scholar] [CrossRef]
- Va, V.; Shimizu, T.; Bansal, G.; Heath, R.W., Jr. Millimeter wave vehicular communications: A survey. Found. Trends Netw. 2016, 10, 1–113. [Google Scholar] [CrossRef]
- Antonescu, B.; Moayyed, M.T.; Basagni, S. mmWave channel propagation modeling for V2X communication systems. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar]
- Anjinappa, C.K.; Guvenc, I. Millimeter-wave V2X channels: Propagation statistics, beamforming, and blockage. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–6. [Google Scholar]
- Wang, Q.; Matolak, D.W.; Ai, B. Shadowing Characterization for 5 GHz Vehicle-to-Vehicle Channels. IEEE Trans. Veh. Technol. 2017, 67, 1855–1866. [Google Scholar] [CrossRef]
- He, R.; Ai, B.; Stuber, G.L.; Wang, G.; Zhong, Z. A cluster based geometrical model for millimeter wave mobile-to-mobile channels. In Proceedings of the 2017 IEEE/CIC International Conference on Communications in China (ICCC), Qingdao, China, 22–24 October 2017; pp. 1–6. [Google Scholar]
- He, R.; Ai, B.; Stüber, G.L.; Wang, G.; Zhong, Z. Geometrical-based modeling for millimeter-wave MIMO mobile-to-mobile channels. IEEE Trans. Veh. Technol. 2018, 67, 2848–2863. [Google Scholar] [CrossRef]
- Giordani, M.; Shimizu, T.; Zanella, A.; Higuchi, T.; Altintas, O.; Zorzi, M. Path loss models for V2V mmWave communication: Performance evaluation and open challenges. In Proceedings of the 2019 IEEE 2nd Connected and Automated Vehicles Symposium (CAVS), Honolulu, HI, USA, 22–23 September 2019; pp. 1–5. [Google Scholar]
- He, D.; Wang, L.; Guan, K.; Ai, B.; Kim, J.; Zhong, Z. Channel characterization for mmwave vehicle-to-infrastructure communications in urban street environment. In Proceedings of the 2019 13th European Conference on Antennas and Propagation (EuCAP), Krakow, Poland, 31 March–5 April 2019; pp. 1–5. [Google Scholar]
- Tassi, A.; Egan, M.; Piechocki, R.J.; Nix, A. Modeling and Design of Millimeter-Wave Networks for Highway Vehicular Communication. IEEE Trans. Veh. Technol. 2017, 66, 10676–10691. [Google Scholar] [CrossRef]
- Lorca, J.; Hunukumbure, M.; Wang, Y. On overcoming the impact of Doppler spectrum in millimeter-wave V2I communications. In Proceedings of the 2017 IEEE Globecom Workshops (GC Wkshps), Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Wang, Y.; Venugopal, K.; Molisch, A.F.; Heath, R.W. MmWave vehicle-to-infrastructure communication: Analysis of urban microcellular networks. IEEE Trans. Veh. Technol. 2018, 67, 7086–7100. [Google Scholar] [CrossRef]
- Yi, W.; Liu, Y.; Deng, Y.; Nallanathan, A.; Heath, R.W. Modeling and analysis of MmWave V2X networks with vehicular platoon systems. IEEE J. Sel. Areas Commun. 2019, 37, 2851–2866. [Google Scholar] [CrossRef]
- González-Prelcic, N.; Méndez-Rial, R.; Heath, R.W. Radar aided beam alignment in mmwave V2I communications supporting antenna diversity. In Proceedings of the 2016 Information Theory and Applications Workshop (ITA), La Jolla, CA, USA, 31 January–5 February 2016; pp. 1–7. [Google Scholar]
- Kumari, P.; Choi, J.; Prelcic, N.G.; Heath, R.W. IEEE 802.11 ad-based Radar: An Approach to Joint Vehicular Communication-Radar System. IEEE Trans. Veh. Technol. 2017, 67, 3012–3127. [Google Scholar] [CrossRef]
- Choi, J.; Va, V.; Gonzalez-Prelcic, N.; Daniels, R.; Bhat, C.R.; Heath, R.W. Millimeter-wave vehicular communication to support massive automotive sensing. IEEE Commun. Mag. 2016, 54, 160–167. [Google Scholar] [CrossRef]
- Mavromatis, I.; Tassi, A.; Piechocki, R.J.; Nix, A. Beam alignment for millimetre wave links with motion prediction of autonomous vehicles. In Proceedings of the Antennas, Propagation & RF Technology for Transport and Autonomous Platforms, Birmingham, UK, 2 February 2017. [Google Scholar]
- Perfecto, C.; Del Ser, J.; Bennis, M. On the interplay between scheduling interval and beamwidth selection for low-latency and reliable V2V mmWave communications. In Proceedings of the 2017 20th Conference on Innovations in Clouds, Internet and Networks (ICIN), Paris, France, 7–9 March 2017; pp. 1–8. [Google Scholar]
- Perfecto, C.; Del Ser, J.; Bennis, M. Millimeter-wave V2V communications: Distributed association and beam alignment. IEEE J. Sel. Areas Commun. 2017, 35, 2148–2162. [Google Scholar] [CrossRef]
- Va, V.; Choi, J.; Heath, R.W. The impact of beamwidth on temporal channel variation in vehicular channels and its implications. IEEE Trans. Veh. Technol. 2017, 66, 5014–5029. [Google Scholar] [CrossRef]
- Loch, A.; Asadi, A.; Sim, G.H.; Widmer, J.; Hollick, M. mm-Wave on wheels: Practical 60 GHz vehicular communication without beam training. In Proceedings of the 2017 9th International Conference on Communication Systems and Networks (COMSNETS), Bangalore, India, 4–8 January 2017; pp. 1–8. [Google Scholar]
- Park, J.J.; Lee, J.; Liang, J.; Kim, K.W.; Lee, K.C.; Kim, M.D. Millimeter wave vehicular blockage characteristics based on 28 GHz measurements. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar]
- Kim, W. Experimental demonstration of MmWave vehicle-to-vehicle communications using IEEE 802.11 ad. Sensors 2019, 19, 2057. [Google Scholar] [CrossRef]
- Huo, Y.; Lu, F.; Wu, F.; Dong, X. Multi-beam multi-stream communications for 5G and beyond mobile user equipment and UAV proof of concept designs. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–5. [Google Scholar]
- Huo, Y.; Dong, X.; Xu, W.; Yuen, M. Enabling multi-functional 5G and beyond user equipment: A survey and tutorial. IEEE Access 2019, 7, 116975–117008. [Google Scholar] [CrossRef]
- Maltsev, A.; Pudeyev, A.; Karls, I.; Bolotin, I.; Morozov, G.; Weiler, R.; Peter, M.; Keusgen, W. Quasi-deterministic approach to mmwave channel modeling in a non-stationary environment. In Proceedings of the 2014 Globecom Workshops (GC Wkshps), Austin, TX, USA, 8–12 December 2014; pp. 966–971. [Google Scholar]
- Weiler, R.J.; Peter, M.; Keusgen, W.; Maltsev, A.; Karls, I.; Pudeyev, A.; Bolotin, I.; Siaud, I.; Ulmer-Moll, A.M. Quasi-deterministic millimeter-wave channel models in MiWEBA. EURASIP J. Wirel. Commun. Netw. 2016, 2016, 84. [Google Scholar] [CrossRef]
- Maltsev, A.; Maslennikov, R.; Sevastyanov, A.; Khoryaev, A.; Lomayev, A. Experimental investigations of 60 GHz WLAN systems in office environment. IEEE J. Sel. Areas Commun. 2009, 27. [Google Scholar] [CrossRef]
- Reference Radiation Patterns of Omnidirectional, Sectoral and Other Antennas for the Fixed and Mobile Service for Use in Sharing Studies in the Frequency Range from 400 MHz to about 70 GHz; Recommendation F.1336; ITU-R: Geneva, Switzerland, 2014.
- Farooq, M.J.; ElSawy, H.; Alouini, M.S. A stochastic geometry model for multi-hop highway vehicular communication. IEEE Trans. Wirel. Commun. 2016, 15, 2276–2291. [Google Scholar] [CrossRef]
- Thornburg, A.; Bai, T.; Heath, R.W. Performance analysis of outdoor mmWave ad hoc networks. IEEE Trans. Signal Process. 2016, 64, 4065–4079. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Unit |
|---|---|---|
| PL | Pathloss | dB |
| NF | Noise figure | dB |
| IL, CB | Implementation and cable loss | dB |
| S | Set of sectors | {1, 2, …,|S|} |
| d | Distance between vehicles | meter |
| , | Antenna gain for Tx or Rx | dBi |
| T | Threshold of target SNR | dB |
| Transmission power | dBm | |
| Vehicle density | – | |
| Lane width of road | meter | |
| Average vehicle length | meter | |
| Beam blockage probability | [0, 1] | |
| Connectivity probability | [0, 1] | |
| Pathloss exponent | 2, 4 | |
| H | Channel response | – |
| Gain | Range | |
|---|---|---|
| Parameter | Value | Unit |
|---|---|---|
| Freq | 60 | GHz |
| BW | 2 | GHz |
| 12 | dBm | |
| d | 20 | meter |
| NF | 3 | dB |
| IL + CB | 27 | dB |
| 3 | meter | |
| 4 | meter | |
| Max lanes | 40 | – |
| 0.2 | – | |
| 2 | – | |
| 4 | – |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, W. Evolutionary Game for Content Cache in a mm-Wave-Based Vehicular Fog. Electronics 2020, 9, 1794. https://doi.org/10.3390/electronics9111794
Kim W. Evolutionary Game for Content Cache in a mm-Wave-Based Vehicular Fog. Electronics. 2020; 9(11):1794. https://doi.org/10.3390/electronics9111794
Chicago/Turabian StyleKim, Wooseong. 2020. "Evolutionary Game for Content Cache in a mm-Wave-Based Vehicular Fog" Electronics 9, no. 11: 1794. https://doi.org/10.3390/electronics9111794
APA StyleKim, W. (2020). Evolutionary Game for Content Cache in a mm-Wave-Based Vehicular Fog. Electronics, 9(11), 1794. https://doi.org/10.3390/electronics9111794