Sky Imager-Based Forecast of Solar Irradiance Using Machine Learning

 , ,
, ,  ,
,
Abstract
1. Introduction
- Proposing a prediction approach that does not rely on meteorological parameters, and encodes an input sky image to take the form of a one-dimensional (1-D) vector to facilitate the use of less complex ML regressors.
- Adopting Latent Semantic Analysis (LSA) to reduce the size of the regressor input vector, without decreasing the prediction accuracy.
- Evaluating the performance of a new proposed approach using a 350,000-sample dataset. The results show that the proposed approach outperforms the more complex state-of-the-art forecasting methodology presented in [7].
2. Data Collection
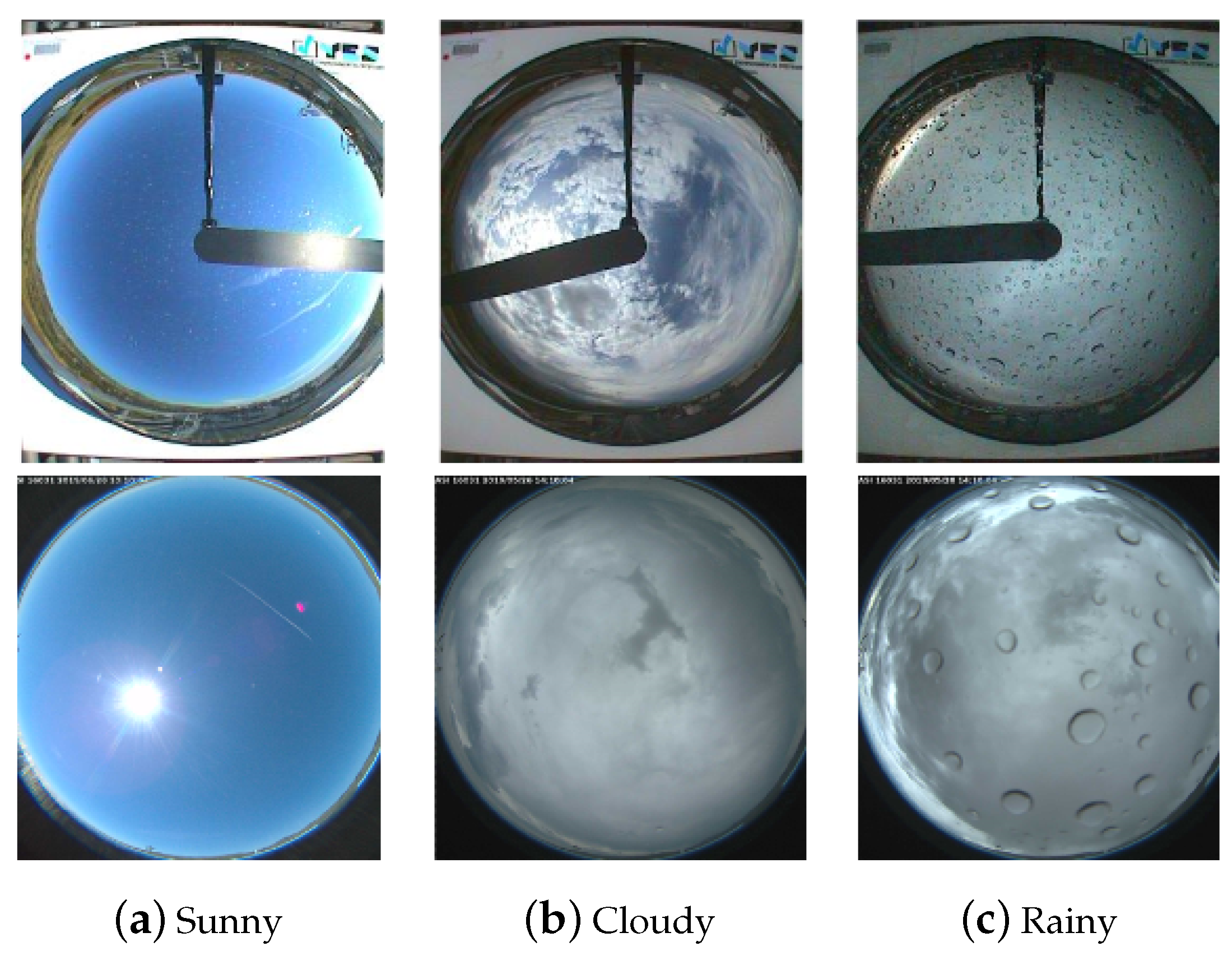
2.1. Total Sky Imager (TSI-880)
2.2. All Sky Imager (ASI-16)
3. GHI Prediction Algorithms
3.1. Feature Extraction
3.2. Regression Algorithms
3.2.1. KNN
3.2.2. Random Forest
3.3. Predictors’ Architectures
| Algorithm 1 Forecasting Process |
| Input: Training set X of size . |
| Test set T of size . |
| N= |
| Ground truth set G of size |
| Output: Predicted GHI up to 4 h ahead |
| Procedure: |
|
4. Results And Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Marcos, J.; Marroyo, L.; Lorenzo, E.; Alvira, D.; Izco, E. Power output fluctuations in large scale PV plants: One year observations with one second resolution and a derived analytic model. Prog. Photovoltaics Res. Appl. 2011, 19, 218–227. [Google Scholar] [CrossRef]
- Martinez-Anido, C.B.; Botor, B.; Florita, A.R.; Draxl, C.; Lu, S.; Hamann, H.F.; Hodge, B.M. The value of day-ahead solar power forecasting improvement. Sol. Energy 2016, 129, 192–203. [Google Scholar] [CrossRef]
- Sediqi, M.M.; Lotfy, M.E.; Ibrahimi, A.M.; Senjyu, T. Stochastic Unit Commitment and Optimal Power Trading Incorporating PV Uncertainty. Sustainability 2019, 11, 4504. [Google Scholar] [CrossRef]
- Kleissl, J. Solar Energy Forecasting and Resource Assessment; Academic Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Antonanzas, J.; Osorio, N.; Escobar, R.; Urraca, R.; Martinez-de Pison, F.J.; Antonanzas-Torres, F. Review of photovoltaic power forecasting. Sol. Energy 2016, 136, 78–111. [Google Scholar] [CrossRef]
- Larson, D.P.; Nonnenmacher, L.; Coimbra, C.F. Day-ahead forecasting of solar power output from photovoltaic plants in the American Southwest. Renew. Energy 2016, 91, 11–20. [Google Scholar] [CrossRef]
- Siddiqui, T.A.; Bharadwaj, S.; Kalyanaraman, S. A deep learning approach to solar-irradiance forecasting in sky-videos. In Proceedings of the 2019 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa Village, HI, USA, 7–11 January 2019; pp. 2166–2174. [Google Scholar]
- Ryu, A.; Ito, M.; Ishii, H.; Hayashi, Y. Preliminary Analysis of Short-term Solar Irradiance Forecasting by using Total-sky Imager and Convolutional Neural Network. In Proceedings of the 2019 IEEE PES GTD Grand International Conference and Exposition Asia (GTD Asia), Bangkok, Thailand, 20–23 March 2019; pp. 627–631. [Google Scholar]
- Vanderstar, G.; Musilek, P.; Nassif, A. Solar Forecasting Using Remote Solar Monitoring Stations and Artificial Neural Networks. In Proceedings of the 2018 IEEE Canadian Conference on Electrical & Computer Engineering (CCECE), Niagara Falls, ON, Canada, 13–16 May 2018; pp. 1–4. [Google Scholar]
- Lee, K.H.; Hsu, M.W.; Leu, Y.G. Solar Irradiance Forecasting Based on Electromagnetism-like Neural Networks. In Proceedings of the 2018 1st IEEE International Conference on Knowledge Innovation and Invention (ICKII), Jeju Island, Korea, 23–27 July 2018; pp. 365–368. [Google Scholar]
- Hassan, M.Z.; Ali, M.E.K.; Ali, A.S.; Kumar, J. Forecasting day-ahead solar radiation using machine learning approach. In Proceedings of the 2017 4th Asia-Pacific World Congress on Computer Science and Engineering (APWC on CSE), Nadi, Fiji, 10–12 December 2017; pp. 252–258. [Google Scholar]
- Ahmed, R.; Sreeram, V.; Mishra, Y.; Arif, M. A review and evaluation of the state-of-the-art in PV solar power forecasting: Techniques and optimization. Renew. Sustain. Energy Rev. 2020, 124, 109792. [Google Scholar] [CrossRef]
- Huynh, A.N.L.; Deo, R.C.; An-Vo, D.A.; Ali, M.; Raj, N.; Abdulla, S. Near real-time global solar radiation forecasting at multiple time-step horizons using the long short-term memory network. Energies 2020, 13, 3517. [Google Scholar] [CrossRef]
- NREL Solar Radiation Research Laboratory (SRRL). TSI-880 Sky Imager Gallery. 2004. Available online: https://midcdmz.nrel.gov/apps/imagergallery.pl?SRRL (accessed on 25 September 2019).
- NREL Solar Radiation Research Laboratory (SRRL). Baseline Measurement System (BMS). 1981. Available online: https://midcdmz.nrel.gov/srrl_bms/ (accessed on 25 September 2019).
- Morris, V. Total Sky Imager (TSI). In Handbook; Citeseer: Richland, WA, USA, 2005. [Google Scholar]
- NREL Solar Radiation Research Laboratory (SRRL). ASI-16 Sky Imager Gallery. 2017. Available online: https://midcdmz.nrel.gov/apps/imagergallery.pl?SRRLASI (accessed on 22 February 2020).
- Deerwester, S.; Dumais, S.T.; Furnas, G.W.; Landauer, T.K.; Harshman, R. Indexing by latent semantic analysis. J. Am. Soc. Inf. Sci. 1990, 41, 391–407. [Google Scholar] [CrossRef]
- Mirzal, A. The limitation of the SVD for latent semantic indexing. In Proceedings of the 2013 IEEE International Conference on Control System, Computing and Engineering, Penang, Malaysia, 29 November–1 December 2013; pp. 413–416. [Google Scholar]
- Cherkassky, V.; Mulier, F.M. Learning from Data: Concepts, Theory, and Methods; Wiley-IEEE Press: Hoboken, NJ, USA, 2007. [Google Scholar]
- Klema, V.; Laub, A. The singular value decomposition: Its computation and some applications. IEEE Trans. Autom. Control 1980, 25, 164–176. [Google Scholar] [CrossRef]
- Pal, K.; Patel, B.V. Data Classification with k-fold Cross Validation and Holdout Accuracy Estimation Methods with 5 Different Machine Learning Techniques. In Proceedings of the 2020 Fourth International Conference on Computing Methodologies and Communication (ICCMC), Erode, India, 11–13 March 2020; pp. 83–87. [Google Scholar]
- Shalev-Shwartz, S.; Ben-David, S. Understanding Machine Learning: From Theory to Algorithms; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Pedro, H.T.; Coimbra, C.F. Assessment of forecasting techniques for solar power production with no exogenous inputs. Sol. Energy 2012, 86, 2017–2028. [Google Scholar] [CrossRef]
- Russell, S.J. Artificial Intelligence: A Modern Approach; Pearson: New York, NY, USA, 2002. [Google Scholar]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning; Springer: Berlin/Heidelberg, Germany, 2013; Volume 112. [Google Scholar]
- Xingjian, S.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. In Advances in Neural Information Processing Systems; Curran Associates, Inc.: Red Hook, NY, USA, 2015; pp. 802–810. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- He, K.; Sun, J. Convolutional neural networks at constrained time cost. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 5353–5360. [Google Scholar]
- Tsironi, E.; Barros, P.; Weber, C.; Wermter, S. An analysis of convolutional long short-term memory recurrent neural networks for gesture recognition. Neurocomputing 2017, 268, 76–86. [Google Scholar] [CrossRef]
- Deng, Z.; Zhu, X.; Cheng, D.; Zong, M.; Zhang, S. Efficient kNN classification algorithm for big data. Neurocomputing 2016, 195, 143–148. [Google Scholar] [CrossRef]
- Louppe, G. Understanding random forests: From theory to practice. arXiv 2014, arXiv:1407.7502. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Method | Test Period | Nowcasting nMAPE (%) | Forecasting nMAPE (%) | |||
|---|---|---|---|---|---|---|---|
| +1 hr | +2 hr | +3 hr | +4 hr | ||||
| TSI-880 | VGG16 [28] | 2015 | 21.0 | - | - | - | - |
| 2016 | 21.9 | - | - | - | - | ||
| A. Siddiqui et al [7] | 2015 | 14.6 | 17.9 | 25.2 | 31.6 | 39.1 | |
| 2016 | 15.7 | 16.9 | 25.0 | 31.9 | 39.5 | ||
| KNN | 2015 | 17.51 | 36 | 38.9 | 41.5 | 44.4 | |
| 2016 | 16.79 | 36.5 | 39.5 | 42.1 | 45.2 | ||
| 2 years (random) | 10.2 | 14.9 | 16.7 | 18.7 | 21.1 | ||
| RF | 2015 | 14.1 | 30.8 | 34.2 | 36.9 | 40.1 | |
| 2016 | 14.8 | 31.4 | 34.7 | 37.5 | 40.6 | ||
| 2 years (random) | 9.8 | 21.9 | 24.9 | 27.8 | 30.6 | ||
| ASI-16 | KNN | 1 year (random) | 14.5 | 14.7 | 15.8 | 16.6 | 18.4 |
| RF | 1 year (random) | 13.35 | 23.5 | 25.5 | 27.6 | 30.5 | |
| Dataset | Method | Test Period | Performance Metric | Nowcasting | Forecasting | |||
|---|---|---|---|---|---|---|---|---|
| +1 hr | +2 hr | +3 hr | +4 hr | |||||
| TSI-880 | KNN | 2 years (random) | RMSE (W/m2) | 71.0 | 122.2 | 137.4 | 151.1 | 164.4 |
| nRMSE (%) | 4.4 | 7.7 | 9.6 | 11.2 | 12 | |||
| RF | 2 years (random) | RMSE (W/m2) | 64.7 | 141.8 | 158.9 | 171.2 | 183.2 | |
| nRMSE (%) | 4 | 8.9 | 11.1 | 12.7 | 13.5 | |||
| ASI-16 | KNN | 1 years (random) | RMSE (W/m2) | 112.3 | 116.7 | 127.6 | 132.3 | 143.8 |
| nRMSE (%) | 8.5 | 8.9 | 9.3 | 10.2 | 11.3 | |||
| RF | 1 years (random) | RMSE (W/m2) | 111.4 | 141.3 | 156.3 | 164.6 | 173.3 | |
| nRMSE (%) | 8.1 | 10.8 | 11.4 | 12.7 | 13.7 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-lahham, A.; Theeb, O.; Elalem, K.; A. Alshawi, T.; A. Alshebeili, S. Sky Imager-Based Forecast of Solar Irradiance Using Machine Learning. Electronics 2020, 9, 1700. https://doi.org/10.3390/electronics9101700
Al-lahham A, Theeb O, Elalem K, A. Alshawi T, A. Alshebeili S. Sky Imager-Based Forecast of Solar Irradiance Using Machine Learning. Electronics. 2020; 9(10):1700. https://doi.org/10.3390/electronics9101700
Chicago/Turabian StyleAl-lahham, Anas, Obaidah Theeb, Khaled Elalem, Tariq A. Alshawi, and Saleh A. Alshebeili. 2020. "Sky Imager-Based Forecast of Solar Irradiance Using Machine Learning" Electronics 9, no. 10: 1700. https://doi.org/10.3390/electronics9101700
APA StyleAl-lahham, A., Theeb, O., Elalem, K., A. Alshawi, T., & A. Alshebeili, S. (2020). Sky Imager-Based Forecast of Solar Irradiance Using Machine Learning. Electronics, 9(10), 1700. https://doi.org/10.3390/electronics9101700