Nonsmooth Current-Constrained Control for a DC–DC Synchronous Buck Converter with Disturbances via Finite-Time-Convergent Extended State Observers

Abstract
:1. Introduction
2. Model Description and Problem Formulation
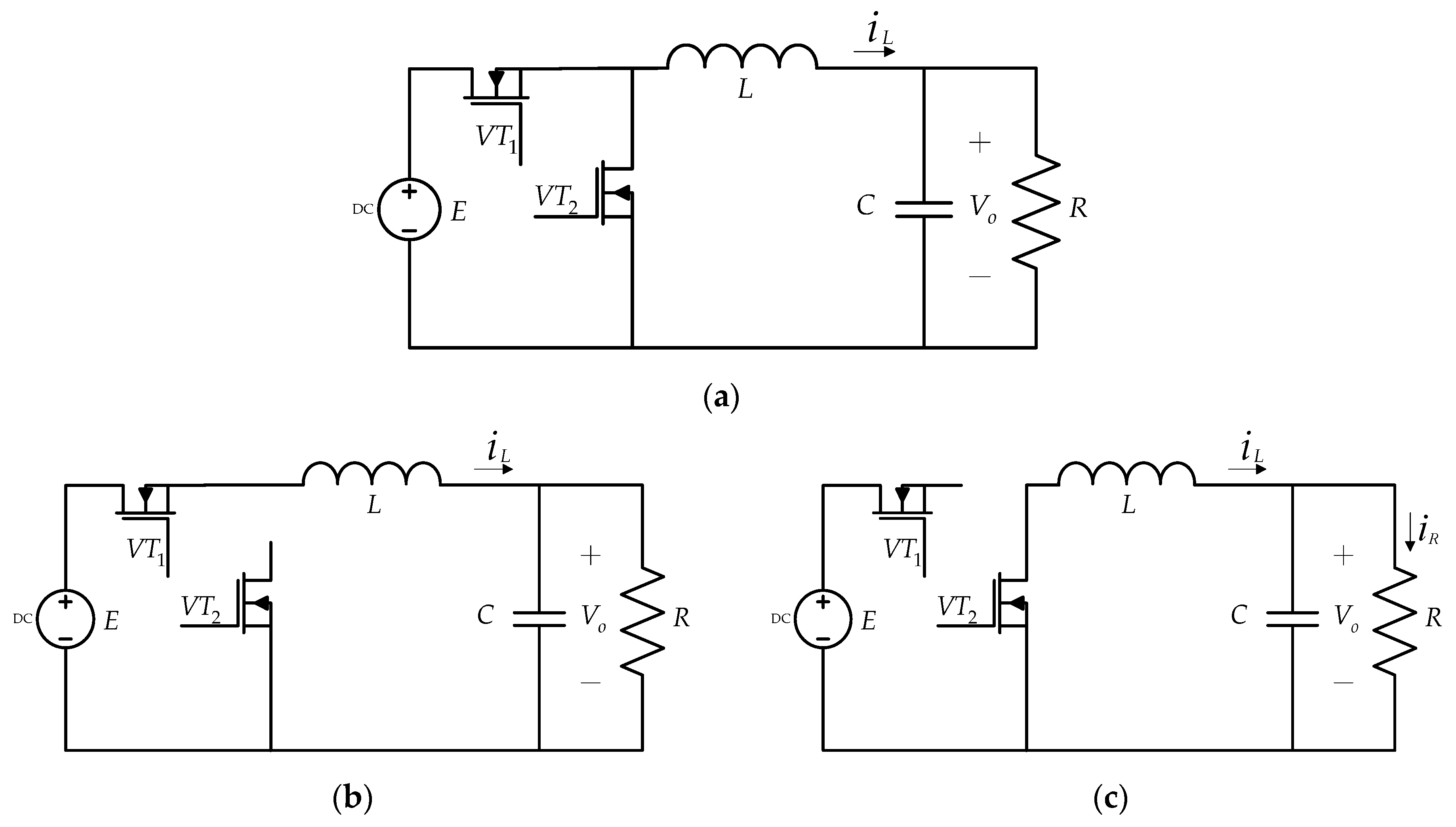
2.1. Modeling the DC–DC Synchronous Buck Converter
2.2. Problem formulation
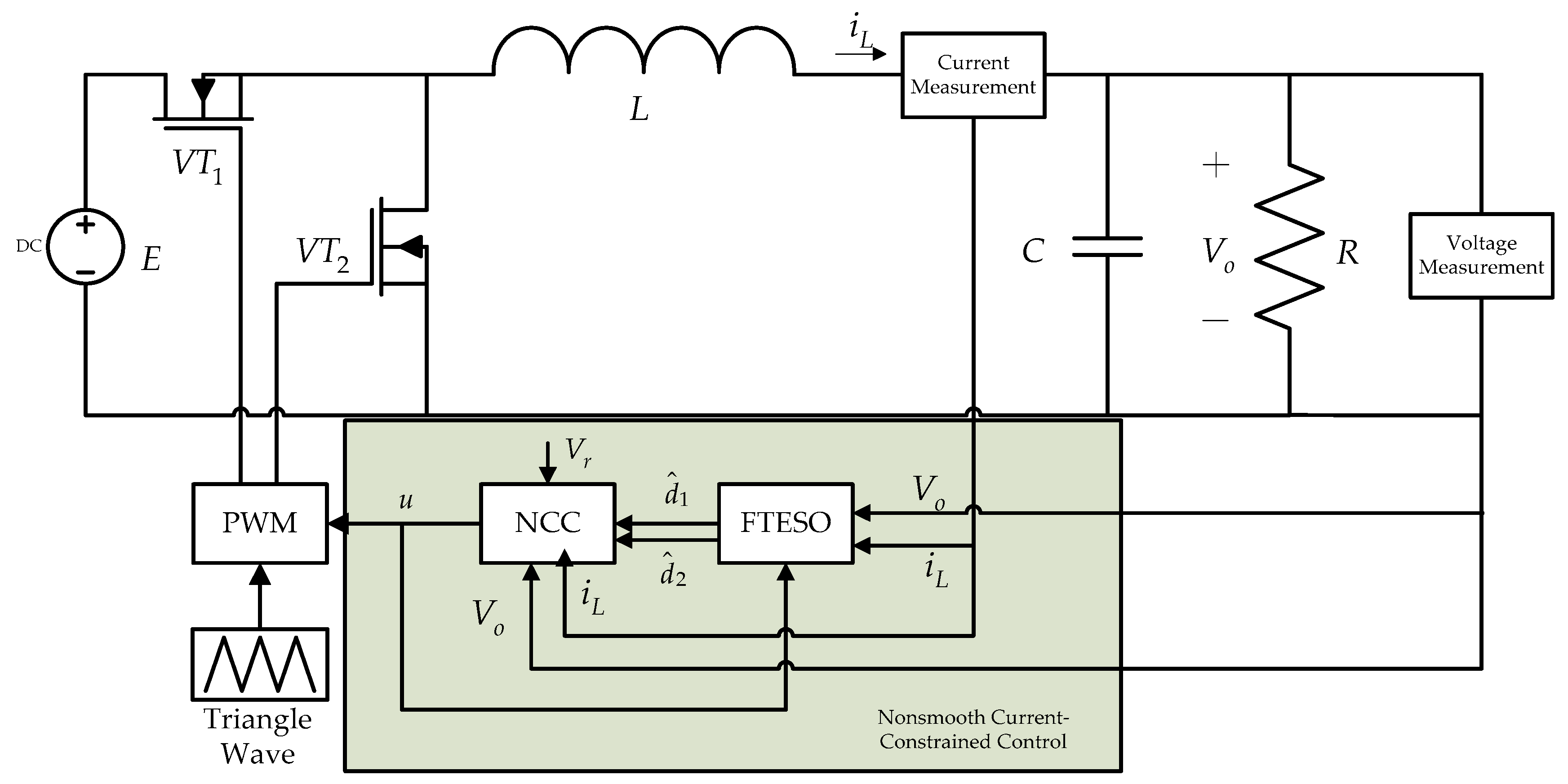
3. Controller Design
3.1. Finite-Time Extended State Observer Design
3.2. Nonsmooth Current-Constrained Control with Disturbance Compensation
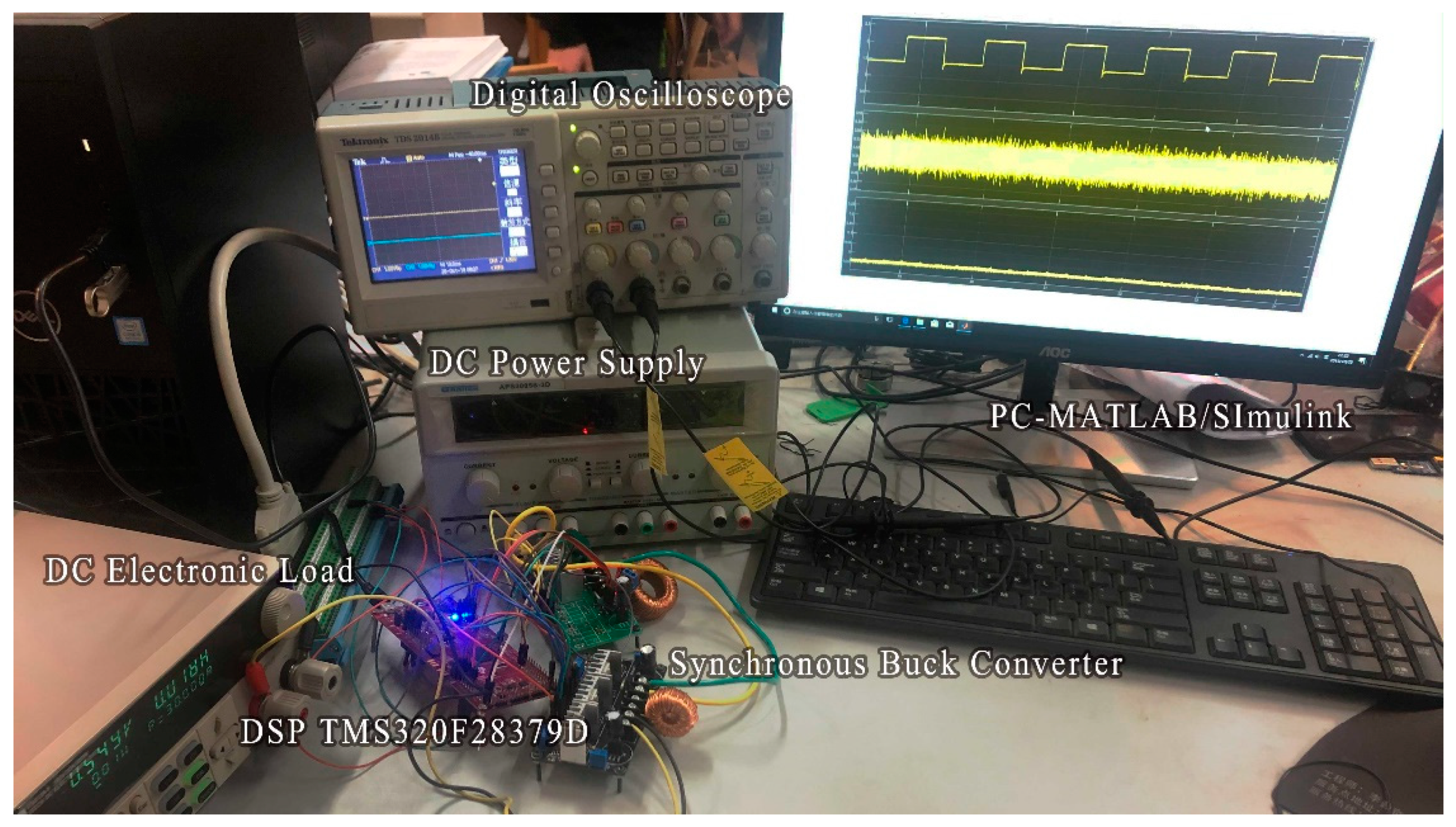
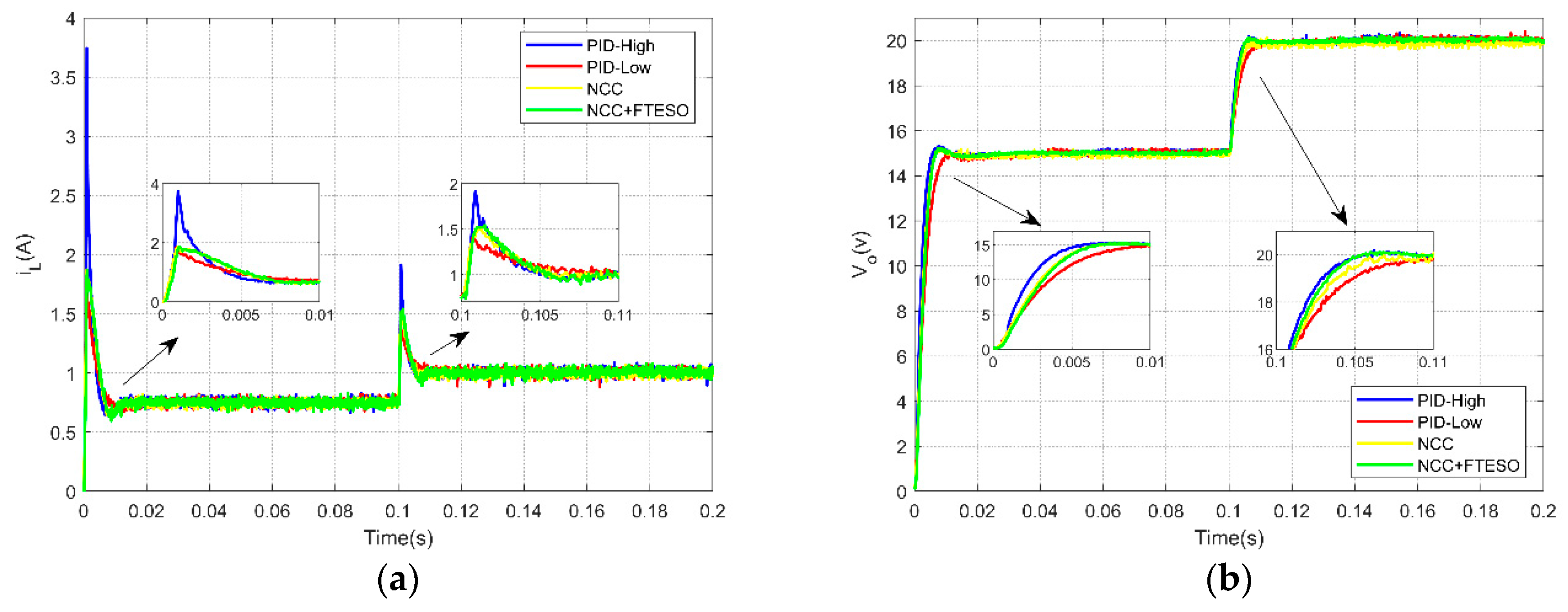
4. Implementation and Validation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics, 2nd ed.; Kluwer Academic: Norwell, MA, USA, 2001; ISBN 9781475705591. [Google Scholar]
- Wang, J.; Zhang, C.; Li, S.; Yang, J.; Li, Q. Finite-time output feedback control for PWM-based DC–DC buck power converters of current sensorless mode. IEEE Trans. Control Syst. Technol. 2016, 25, 1359–1371. [Google Scholar] [CrossRef]
- Wang, J.; Li, S.; Yang, J.; Wu, B.; Li, Q. Finite-time disturbance observer based non-singular terminal sliding-mode control for pulse width modulation based DC–DC buck converters with mismatched load disturbances. IET Power Electron. 2016, 9, 1995–2002. [Google Scholar] [CrossRef]
- Yang, J.; Wu, B.; Li, S.; Yu, X. Design and qualitative robustness analysis of an DOBC approach for DC-DC buck converters with unmatched circuit parameter perturbations. IEEE Trans. Circuits Syst. I Regul. Pap. 2016, 63, 551–560. [Google Scholar] [CrossRef]
- Wang, Z.; Li, S.; Wang, J.; Li, Q. Robust control for disturbed buck converters based on two GPI observers. Control Eng. Pract. 2017, 66, 13–22. [Google Scholar] [CrossRef]
- Wei, Y.; Qiu, J.; Karimi, H.R.; Ji, W. A novel memory filtering design for semi-Markovian jump time-delay systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 48, 2229–2241. [Google Scholar] [CrossRef]
- Wei, Y.; Qiu, J.; Shi, P.; Wu, L. A piecewise-markovian lyapunov approach to reliable output feedback control for fuzzy-affine systems with time-delays and actuator faults. IEEE Trans. Cybern. 2017, 48, 2723–2735. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.; Zhang, C.; Liu, C.; Yang, J.; Li, S. Disturbance rejection for nonlinear uncertain systems with output measurement errors: Application to a helicopter model. IEEE Trans. Ind. Inf. 2019. [Google Scholar] [CrossRef]
- Roy, S.; Baldi, S. On reduced-complexity robust adaptive control of switched Euler–Lagrange systems. Nonlinear Anal. Hybrid Syst. 2019, 34, 226–237. [Google Scholar] [CrossRef]
- Wei, Y.; Yu, H.; Karimi, H.R.; Joo, Y.H. New approach to fixed-order output-feedback control for piecewise-affine systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2018, 65, 2961–2969. [Google Scholar] [CrossRef]
- Kumar, G.; Kumar, A.; Jakka, R. The particle swarm modified quasi bang-bang controller for seismic vibration control. Ocean Eng. 2018, 166, 105–116. [Google Scholar] [CrossRef]
- Kim, H.; Kim, J.; Shim, M.; Jung, J.; Park, S.; Kim, C. A digitally controlled DC-DC buck converter with bang-bang control. In Proceedings of the 2014 International Conference on Electronics, Information and Communications (ICEIC), Kota Kinabalu, Malaysia, 5–18 January 2014; pp. 1–2. [Google Scholar]
- Roy, S.; Roy, S.B.; Lee, J.; Baldi, S. Overcoming the underestimation and overestimation problems in adaptive sliding mode control. IEEE/ASME Trans. Mechatron. 2019, 24, 2031–2039. [Google Scholar] [CrossRef] [Green Version]
- Roy, S.; Baldi, S.; Fridman, L.M. On adaptive sliding mode control without a priori bounded uncertainty. Automatica 2019. [Google Scholar] [CrossRef]
- Zhou, H.; Chen, R.; Zhou, S.; Liu, Z. Design and Analysis of a Drive System for a Series Manipulator Based on Orthogonal-Fuzzy PID Control. Electronics 2019, 8, 1051. [Google Scholar] [CrossRef] [Green Version]
- Poyyamani Sunddararaj, S.; Rangarajan, S.S.; Gopalan, S. Neoteric Fuzzy Control Stratagem and Design of Chopper fed Multilevel Inverter for Enhanced Voltage Output Involving Plug-In Electric Vehicle (PEV) Applications. Electronics 2019, 8, 1092. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Cao, J.; Xie, C. Finite-time and fixed-time bipartite consensus of multi-agent systems under a unified discontinuous control protocol. J. Franklin Inst. 2017, 356, 734–751. [Google Scholar] [CrossRef]
- Li, D.; Cao, J. Fuzzy finite-time stability of chaotic systems with time-varying delay and parameter uncertainties. Math. Prob. Eng. 2015, 2015. [Google Scholar] [CrossRef] [Green Version]
- Bhat, S.P.; Bernstein, D.S. Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans. Autom. Control 1998, 43, 678–682. [Google Scholar] [CrossRef] [Green Version]
- Hong, Y.; Huang, J.; Xu, Y. On an output feedback finite-time stabilization problem. IEEE Trans. Autom. Control 2001, 46, 305–309. [Google Scholar] [CrossRef] [Green Version]
- Guo, T.; Wang, Z.; Wang, X.; Li, S.; Li, Q. A simple control approach for buck converters with current-constrained technique. IEEE Trans. Control Syst. Technol. 2017, 27, 418–425. [Google Scholar] [CrossRef]
- Ma, F.-F.; Chen, W.-Z.; Wu, J.-C. A monolithic current-mode buck converter with advanced control and protection circuits. IEEE Trans. Power Electron. 2007, 22, 1836–1846. [Google Scholar] [CrossRef]
- Sun, Z.; Guo, T.; Yan, Y.; Wang, X.; Li, S. A composite current-constrained control for permanent magnet synchronous motor with time-varying disturbance. Adv. Mech. Eng. 2017, 9. [Google Scholar] [CrossRef] [Green Version]
- Gilbert, E.G.; Tan, K.T. Linear systems with state and control constraints: The theory and application of maximal output admissible sets. IEEE Trans. Autom. Control 1991, 36, 1008–1020. [Google Scholar] [CrossRef] [Green Version]
- Mayne, D.; Schroeder, W. Nonlinear control of constrained linear systems: Regulation and tracking. In Proceedings of the 1994 33rd IEEE Conference on Decision and Control, Lake Buena Vista, FL, USA, 14–16 December 1994; pp. 2370–2375. [Google Scholar]
- Eaton, J.W.; Rawlings, J.B. Model-predictive control of chemical processes. Chem. Eng. Sci. 1992, 47, 705–720. [Google Scholar] [CrossRef]
- Lazar, M.; Heemels, W.; Roset, B.; Nijmeijer, H.; Van Den Bosch, P. Input-to-state stabilizing sub-optimal NMPC with an application to DC–DC converters. Int. J. Robust Nonlin. Control 2008, 18, 890–904. [Google Scholar] [CrossRef]
- Yang, J.; Zheng, W.X.; Li, S.; Wu, B.; Cheng, M. Design of a prediction-accuracy-enhanced continuous-time MPC for disturbed systems via a disturbance observer. IEEE Trans. Ind. Electron. 2015, 62, 5807–5816. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S.; Tay, F.E.H. Adaptive control of electrostatic microactuators with bidirectional drive. IEEE Trans. Control Syst. Technol. 2008, 17, 340–352. [Google Scholar]
- Won, D.; Kim, W.; Shin, D.; Chung, C.C. High-gain disturbance observer-based backstepping control with output tracking error constraint for electro-hydraulic systems. IEEE Trans. Control Syst. Technol. 2014, 23, 787–795. [Google Scholar] [CrossRef]
- Chen, W.-H.; Yang, J.; Guo, L.; Li, S. Disturbance-observer-based control and related methods—An overview. IEEE Trans. Ind. Electron. 2015, 63, 1083–1095. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Li, Q.; Liu, B.; Cheng, H. Trajectory tracking control of a one degree of freedom manipulator based on a switched sliding mode controller with a novel extended state observer framework. IEEE Trans. Syst. Man Cybern. Syst. 2017, 49, 1110–1118. [Google Scholar] [CrossRef]
- Li, B.; Hu, Q.; Yang, Y. Continuous finite-time extended state observer based fault tolerant control for attitude stabilization. Aerosp. Sci. Technol. 2019, 84, 204–213. [Google Scholar] [CrossRef]
- Rosier, L. Homogeneous Lyapunov function for homogeneous continuous vector field. Syst. Contr. Lett. 1992, 19, 467–473. [Google Scholar] [CrossRef]
- Du, H.; He, Y.; Cheng, Y. Finite-time synchronization of a class of second-order nonlinear multi-agent systems using output feedback control. IEEE Trans. Circuits Syst. I Regul. Pap. 2014, 61, 1778–1788. [Google Scholar] [CrossRef]
- Xu, B.; Shi, Z.; Sun, F.; He, W. Barrier Lyapunov function based learning control of hypersonic flight vehicle with AOA constraint and actuator faults. IEEE Trans. Cybern. 2018, 49, 1047–1057. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Zhao, L.; Yu, H.; Lin, C. Barrier Lyapunov functions-based command filtered output feedback control for full-state constrained nonlinear systems. Automatica 2019, 105, 71–79. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2002; ISBN 0130673897. [Google Scholar]
- Roy, S.; Baldi, S. A Simultaneous Adaptation Law for a Class of Nonlinearly Parametrized Switched Systems. IEEE Control Syst. Lett. 2019, 3, 487–492. [Google Scholar] [CrossRef] [Green Version]
- Roy, S.; Kar, I.N.; Lee, J.; Tsagarakis, N.G.; Caldwell, D.G. Adaptive-robust control of a class of EL systems with parametric variations using artificially delayed input and position feedback. IEEE Trans. Control Syst. Technol. 2017, 27, 603–615. [Google Scholar] [CrossRef] [Green Version]
- Roy, S.; Kar, I.N. Adaptive-Robust Control with Limited Knowledge on Systems Dynamics: An Artificial Input Delay Approach and Beyond; Springer Nature: Singapore, 2019; ISBN 9789811506390. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Descriptions | Parameters | Nominal Values |
|---|---|---|
| Input Voltage | E | 30 (V) |
| Desired Out Voltage | 15 (V) | |
| Inductance | L | 15 (mH) |
| Capacitance | C | 470 (μF) |
| Load Resistance | R | 20 (Ω) |
| Controllers | Parameters |
|---|---|
| NCC + FTESO | l = 200, M = 2, , , = 1/2, = 2/3, = 1, , , , |
| NCC | l = 200, M = 2, , , = 1/2, = 2/3, = 1 |
| PID (High gain) | , , |
| PID (Low gain) | , , |
| Controllers | Start-Up | Reference Voltage Change | Load Resistance Change | Input Voltage Change |
|---|---|---|---|---|
| PID (High gain) | 0.0055 (s) | 0.0043 (s) | 0.0277 (s) | 0.0217 (s) |
| PID (Low gain) | 0.0096 (s) | 0.0083 (s) | 0.0370 (s) | 0.0242 (s) |
| NCC | 0.0063 (s) | 0.0055 (s) | / | / |
| NCC + FTESO | 0.0063 (s) | 0.0046 (s) | 0.0207 (s) | 0.0097 (s) |
| Controllers | Start-Up | Reference Voltage Change | Load Resistance Change | Input Voltage Change |
|---|---|---|---|---|
| PID (High gain) | 0.10 (V) | 0.11 (V) | 0.11 (V) | 0.10 (V) |
| PID (Low gain) | 0.10 (V) | 0.10 (V) | 0.11 (V) | 0.09 (V) |
| NCC | 0.07 (V) | 0.13 (V) | / | / |
| NCC + FTESO | 0.06 (V) | 0.08 (V) | 0.09 (V) | 0.08 (V) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, Q.; Sun, Z.; Zhang, X. Nonsmooth Current-Constrained Control for a DC–DC Synchronous Buck Converter with Disturbances via Finite-Time-Convergent Extended State Observers. Electronics 2020, 9, 16. https://doi.org/10.3390/electronics9010016
Miao Q, Sun Z, Zhang X. Nonsmooth Current-Constrained Control for a DC–DC Synchronous Buck Converter with Disturbances via Finite-Time-Convergent Extended State Observers. Electronics. 2020; 9(1):16. https://doi.org/10.3390/electronics9010016
Chicago/Turabian StyleMiao, Qiqing, Zhenxing Sun, and Xinghua Zhang. 2020. "Nonsmooth Current-Constrained Control for a DC–DC Synchronous Buck Converter with Disturbances via Finite-Time-Convergent Extended State Observers" Electronics 9, no. 1: 16. https://doi.org/10.3390/electronics9010016
APA StyleMiao, Q., Sun, Z., & Zhang, X. (2020). Nonsmooth Current-Constrained Control for a DC–DC Synchronous Buck Converter with Disturbances via Finite-Time-Convergent Extended State Observers. Electronics, 9(1), 16. https://doi.org/10.3390/electronics9010016