1. Introduction
The life expectancy of people, and hence, the number of older adults, is increasing. Elderly people are most vulnerable to strokes. Stroke is among the main causes of limb disabilities and can be fatal [
1,
2]. According to statistics [
3], more than 10 million people suffer from a stroke annually. Consequently, patients become dependent on others for their basic life activities. Physical therapy under the supervision of physiotherapists can help stroke patients to restore the functionality of their disabled limbs. However, traditional physical therapy involves manpower and is highly expensive as the number of patients increases. Rehabilitation robots have been introduced recently to reduce the burden on physiotherapists and increase the number of exercises performed during a therapy session. These robots can provide a more reliable service as they do not face monotony and fatigue failures due to the repetitive nature of the exercises. One of the most widely used control mechanisms employed in such robots is a proportional–integral–derivative (PID) controller. This mechanism is famous for its simple structure and robust performance in a wide range of operating conditions [
4]. However, it is quite difficult to select and determine the PID controller parameters for the system. The control parameters are tuned to achieve stable closed-loop response of the system and reach desired positions within a certain time. Several approaches have been proposed to optimize the PID controller parameters, such as Zeigler-Nichols, a classical method to tune PID control parameters [
5], fuzzy logic controller [
6,
7] and evolutionary algorithms such as genetic algorithm (GA) [
8], and swarm optimization algorithms such as ant colony algorithm (ACO) [
9], particle swarm optimization (PSO) [
10] and artificial bee colony (ABC) algorithm [
11].
The Zeigler-Nichols is a heuristic algorithm based on increasing proportional gain until it reaches the ultimate gain at which output of a control loop system has consistent oscillations. The parameters and oscillation period are used to parametrize PID gains. Using such a controller produces oscillations which introduce large overshoot, higher rise times and lower settling time in the response.
GA is based on the theory of biological operations and optimizes parameters using mutations and crossover operations [
12]. ACO is an evolutionary algorithm inspired by the social behavior of ants searching for food using the shortest path. The success rate of ACO is lower than that of PSO [
13]. Fuzzy logic is another technique to optimize the parameters of PID. The rehabilitation robot is controlled by PID and the parameters of PID are optimized using fuzzy logic. Every parameter of the PID controller is characterized by different sets of fuzzy rules, and triangular membership functions are used. Experimental results showed that fuzzy PID offers improved and more effective trajectory tracking performance compared to conventional PID controllers [
14,
15].
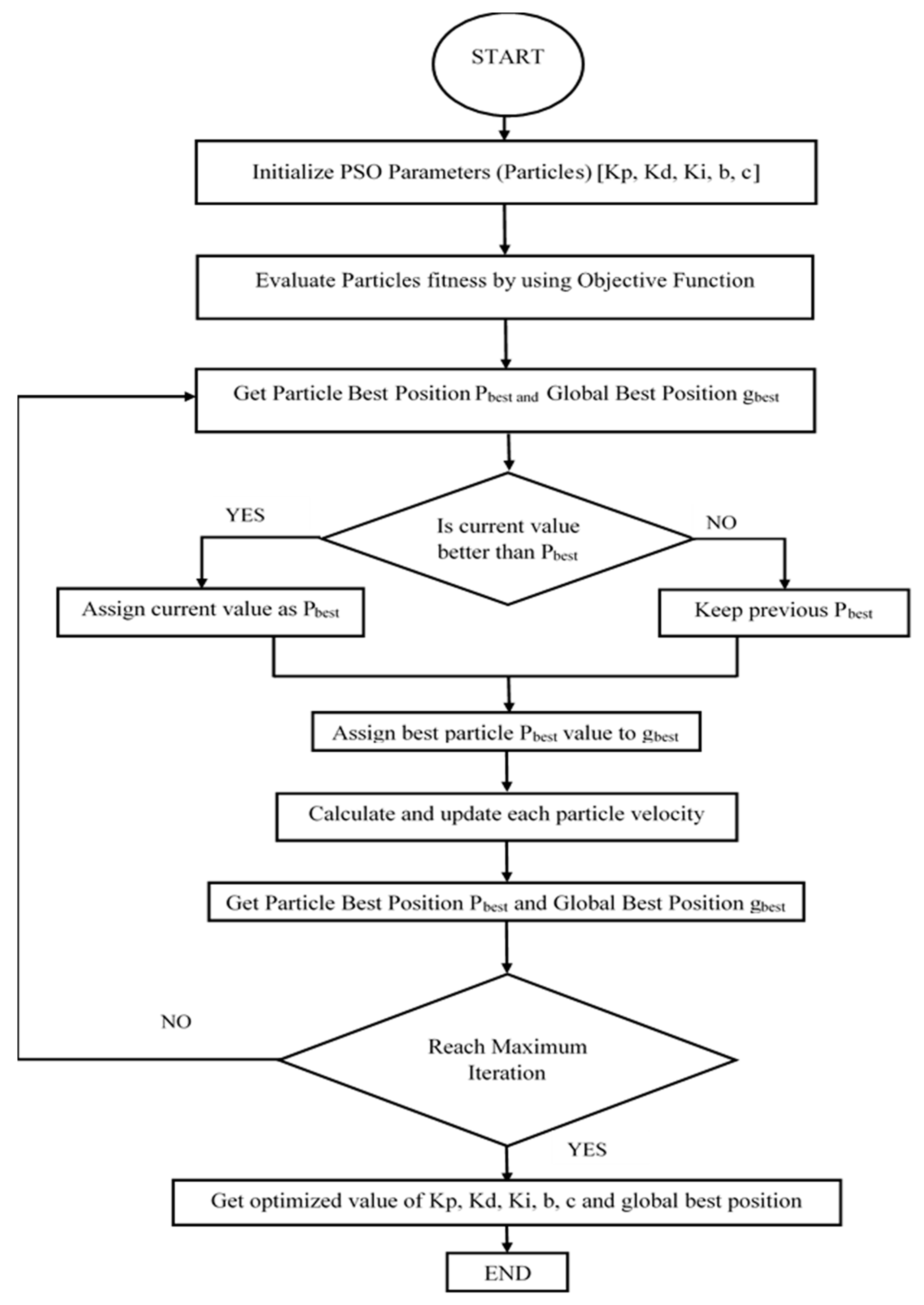
PSO algorithm is an evolutionary computation technique inspired by the social behavior of swarms and fish schools. It was first introduced by Eberhart and Kennedy in 1995. Later Eberhart and Shi introduced inertial weights for PSO to provide the global and local exploration balance. PSO has been found to be robust in optimizing nonlinear problems. The PSO technique evaluates the particle position and velocity, which are updated on every iteration with the aim to reach a global best position of the swarm. Every particle in PSO is treated as a volume-less particle in the search space. PSO requires fewer computational resources than GA, which is prone to premature convergence, while its convergence rate is slower than PSO and ABC [
16]. PSO is widely used in many engineering applications because of its advancements. Previously, a PSO based optimized PID controller was used to control a multi fingered robotic hand. Comparison of PSO and conventional PID with fuzzy PID is also presented in the work which shows the better results of PSO-PID [
17].
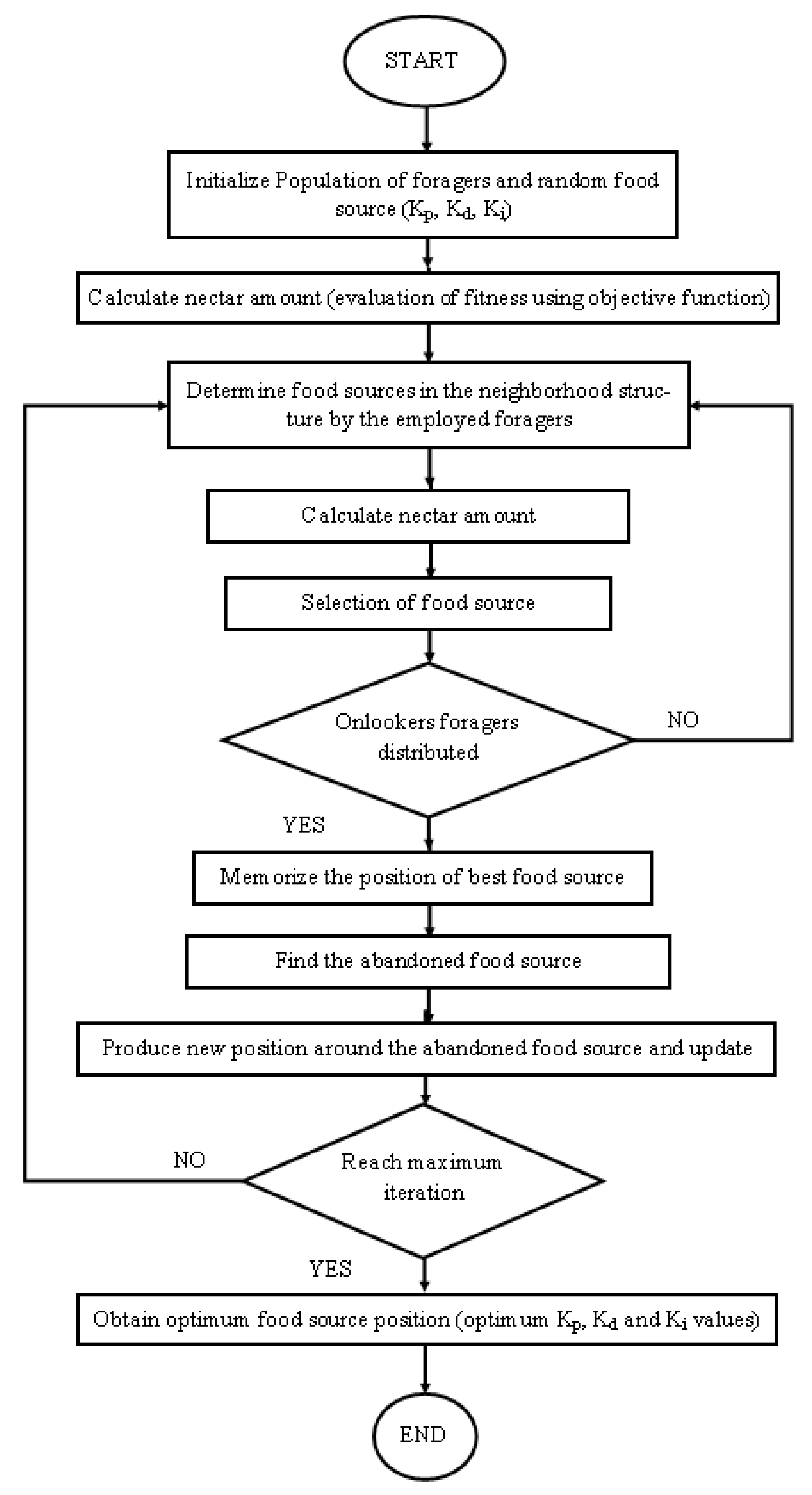
ABC is a heuristic technique which is inspired by the intelligent foraging behavior of honeybees. It was proposed by Karaboga in 2005 [
11], and is a simple, robust and population based stochastic optimization algorithm [
16,
18]. The following three categories of bees make the algorithm unique as compared to other swarm algorithms: employed, onlookers and scout bees [
19]. In particular, this meta-heuristic algorithm replicates the foraging behavior of honey bees, where a foraging bee evaluates several characteristics of a food source, such as richness of nectar and the complexity of extracting the energy, and communicates the position of the food source to unemployed bees. The communicated information includes the direction and distance to the food source and its profitability; it is regularly updated so that the best food source can be determined. In a recent study, a comparison reported that by using integral square error (ISE) as the objective function to optimize PID, better performance was obtained using PSO than ABC [
14]. However, in terms of transient time response that overshoots in the response of system, the rise and settling times of ABC is better than PSO. Although the rise time of PSO is faster than ABC, in rehabilitation, high speed is not recommended, so the slow rise times of ABC eventually offer the benefit of safe movement of the robot and avoid abrupt movements. Also, the ABC algorithm outputs high quality solutions in terms of fitness value with fewer function evaluations in comparison to PSO. It was found that ABC is more robust than PSO optimized controller [
20].
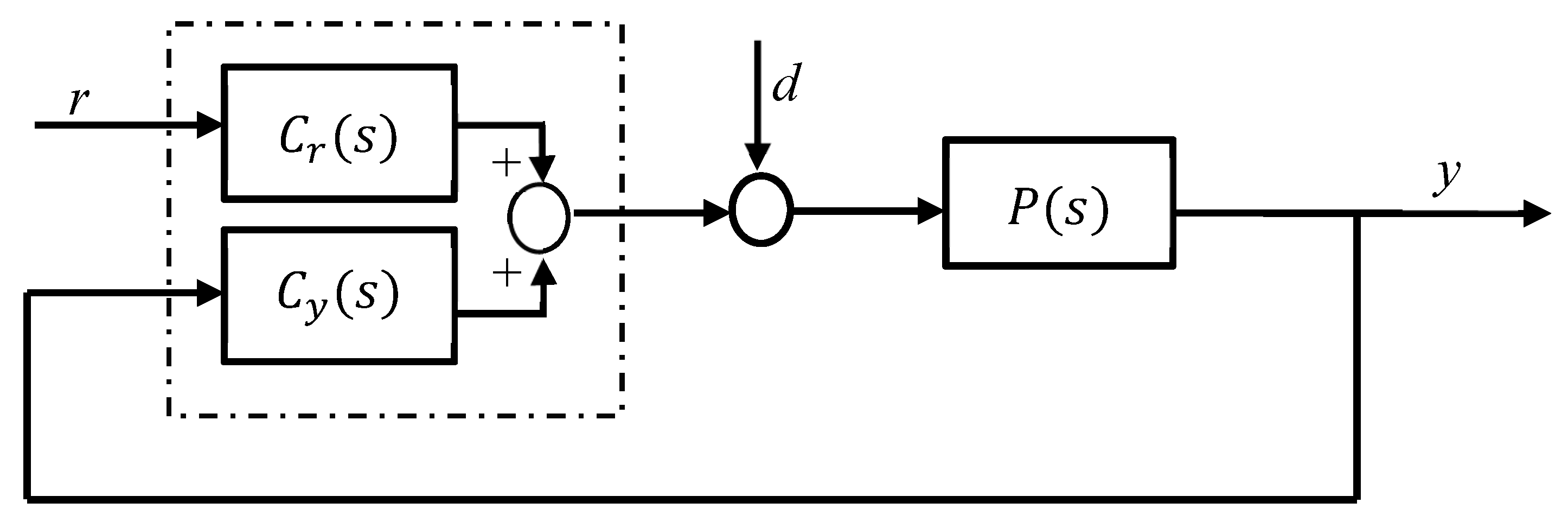
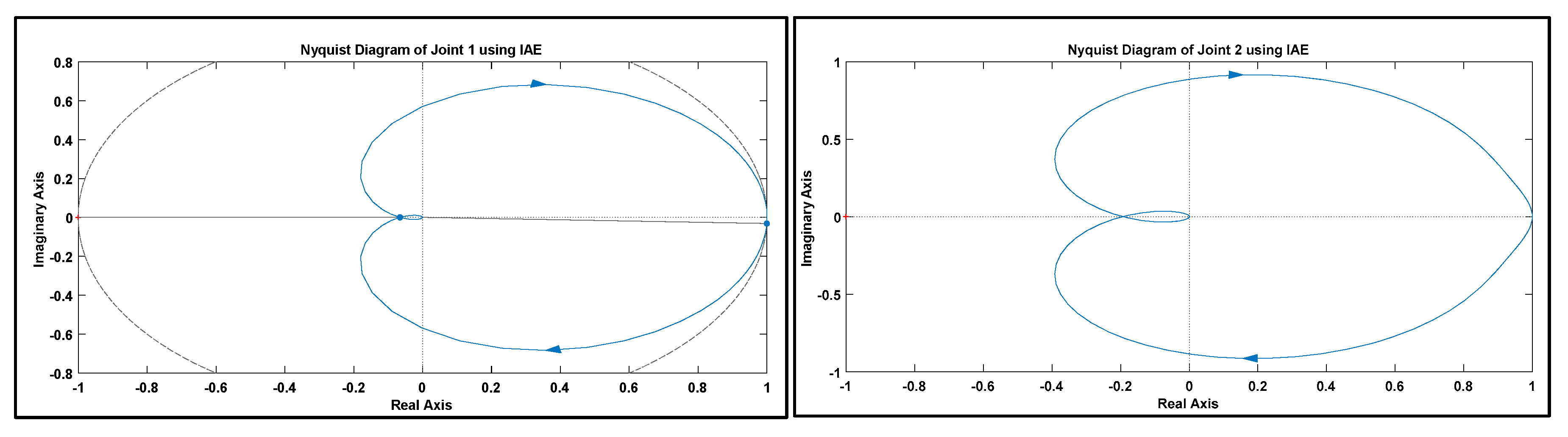
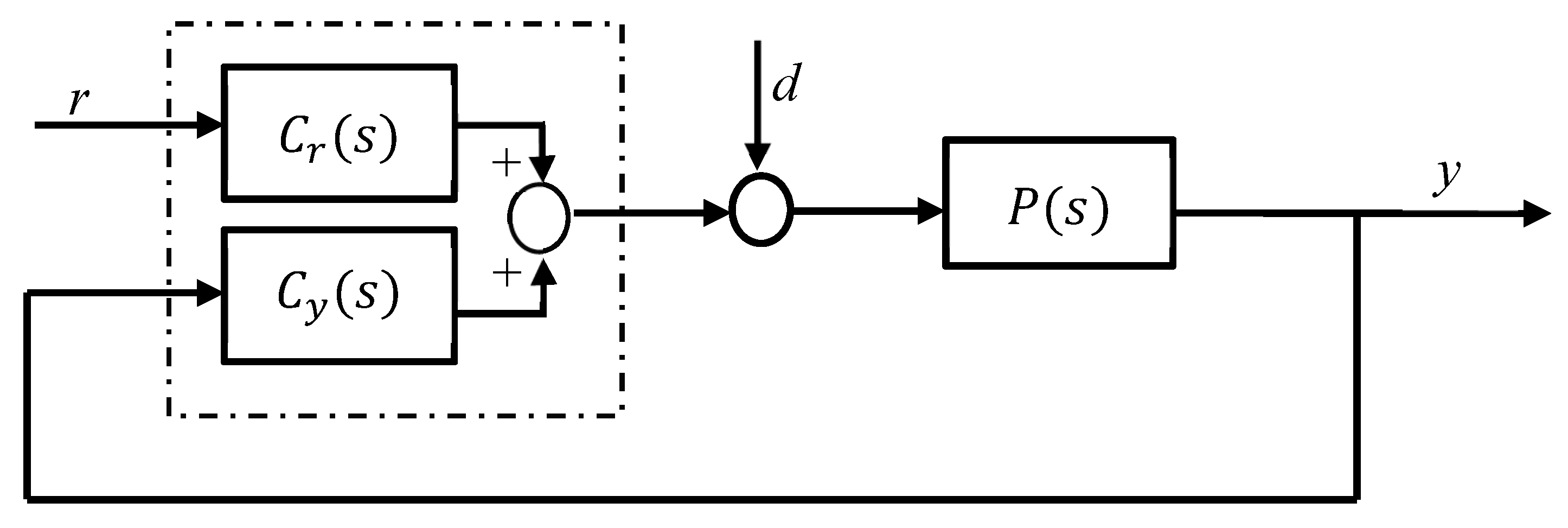
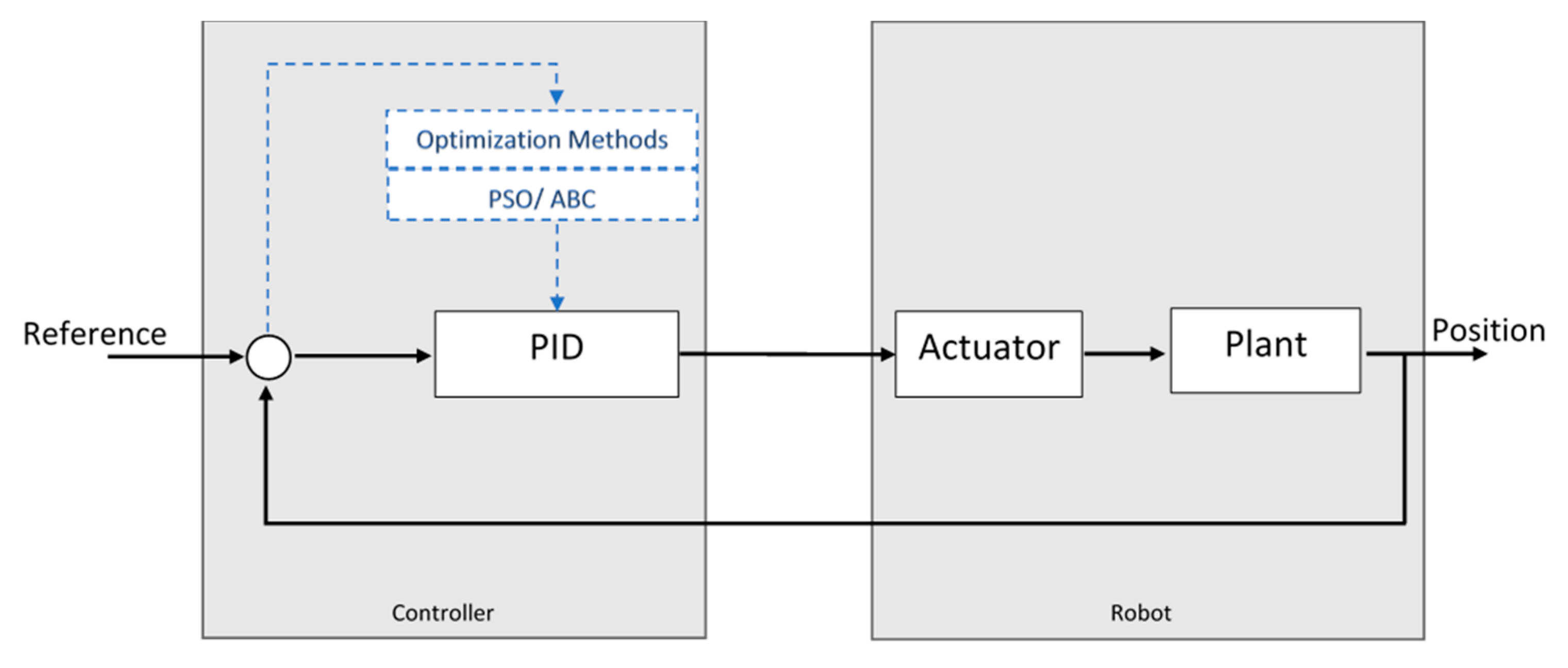
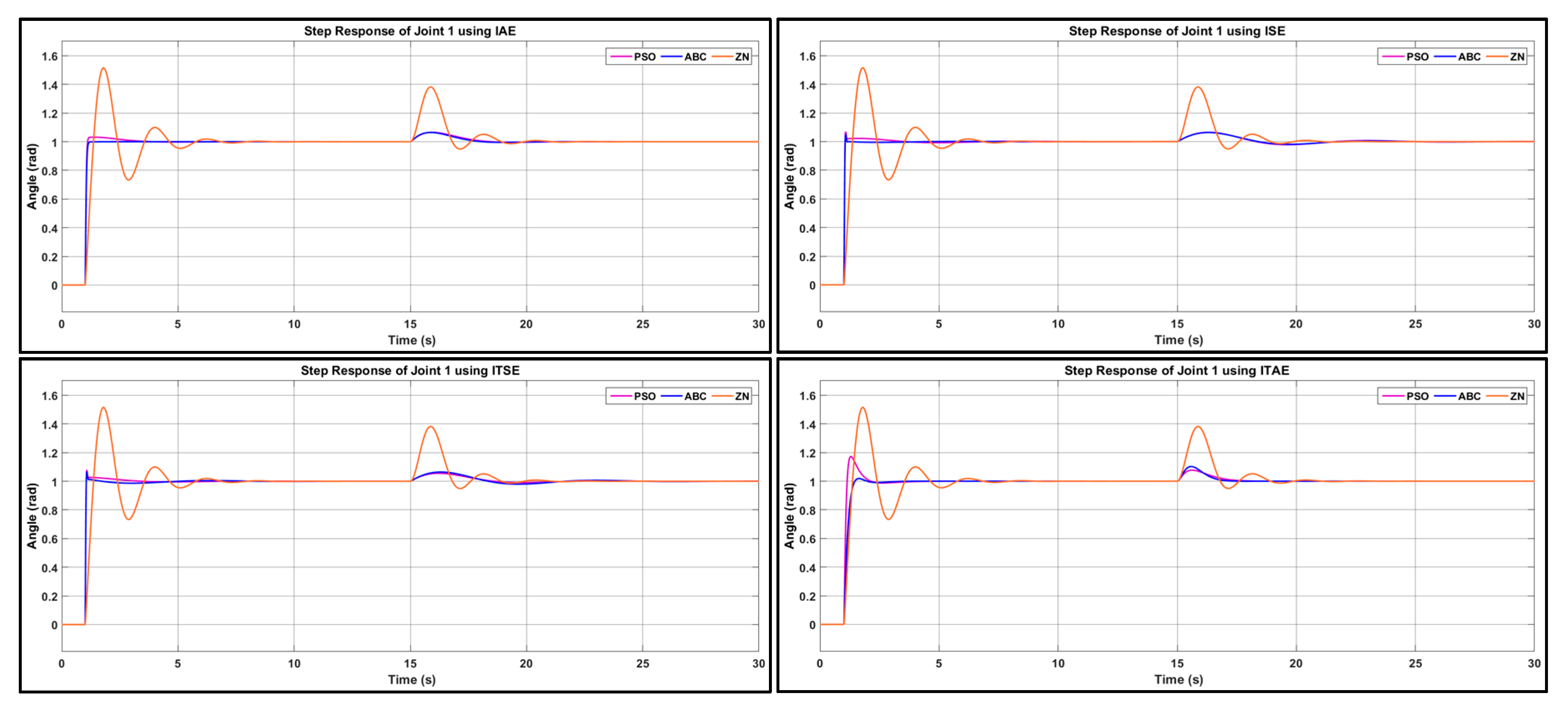
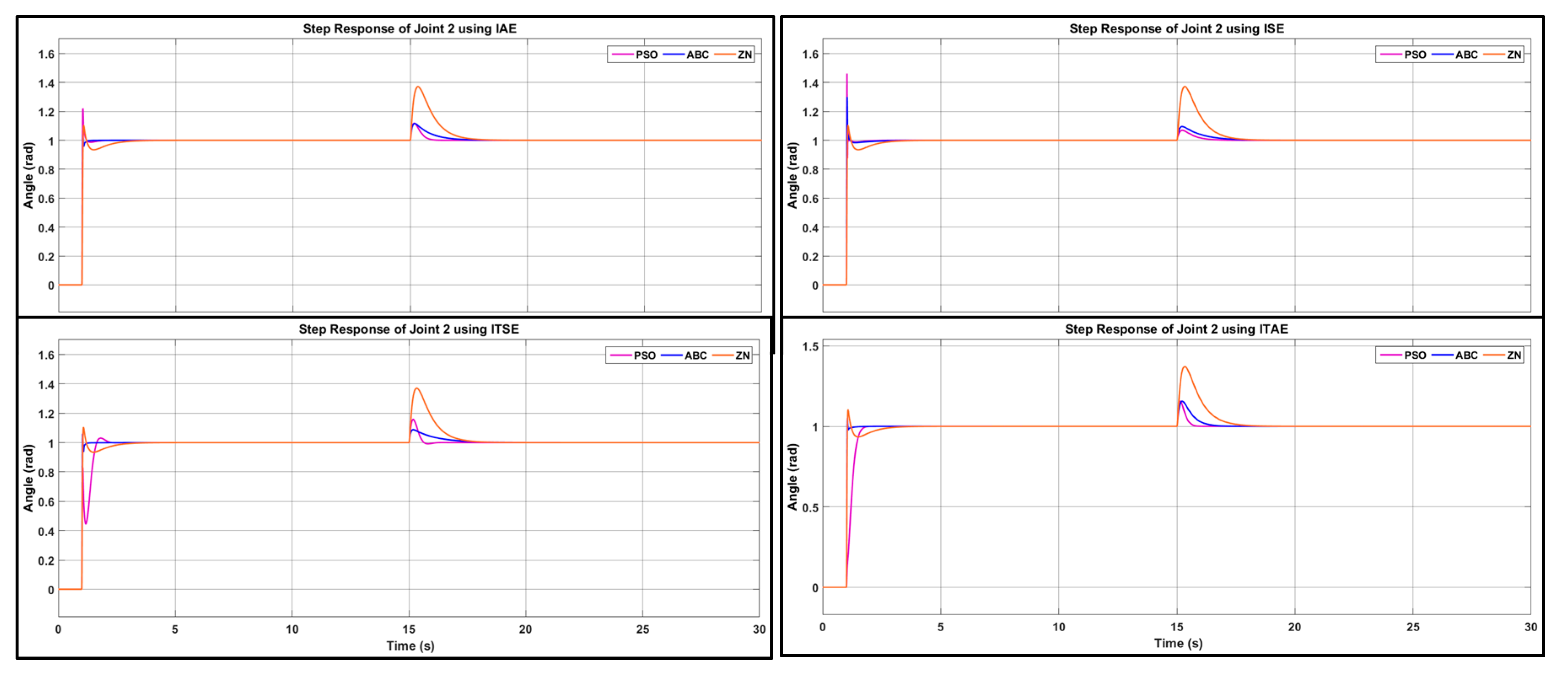
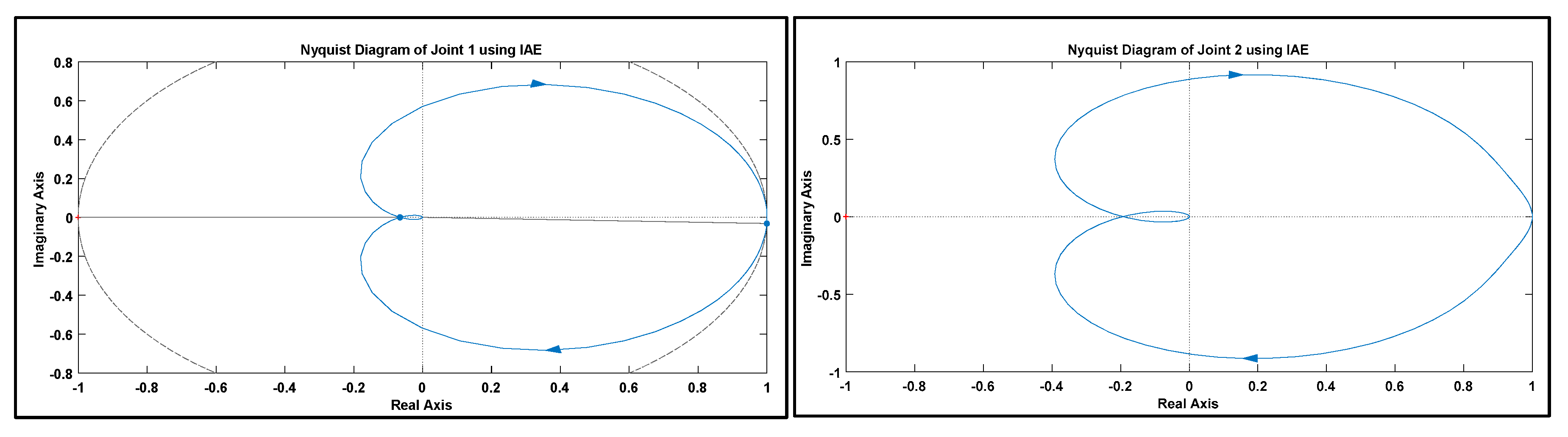
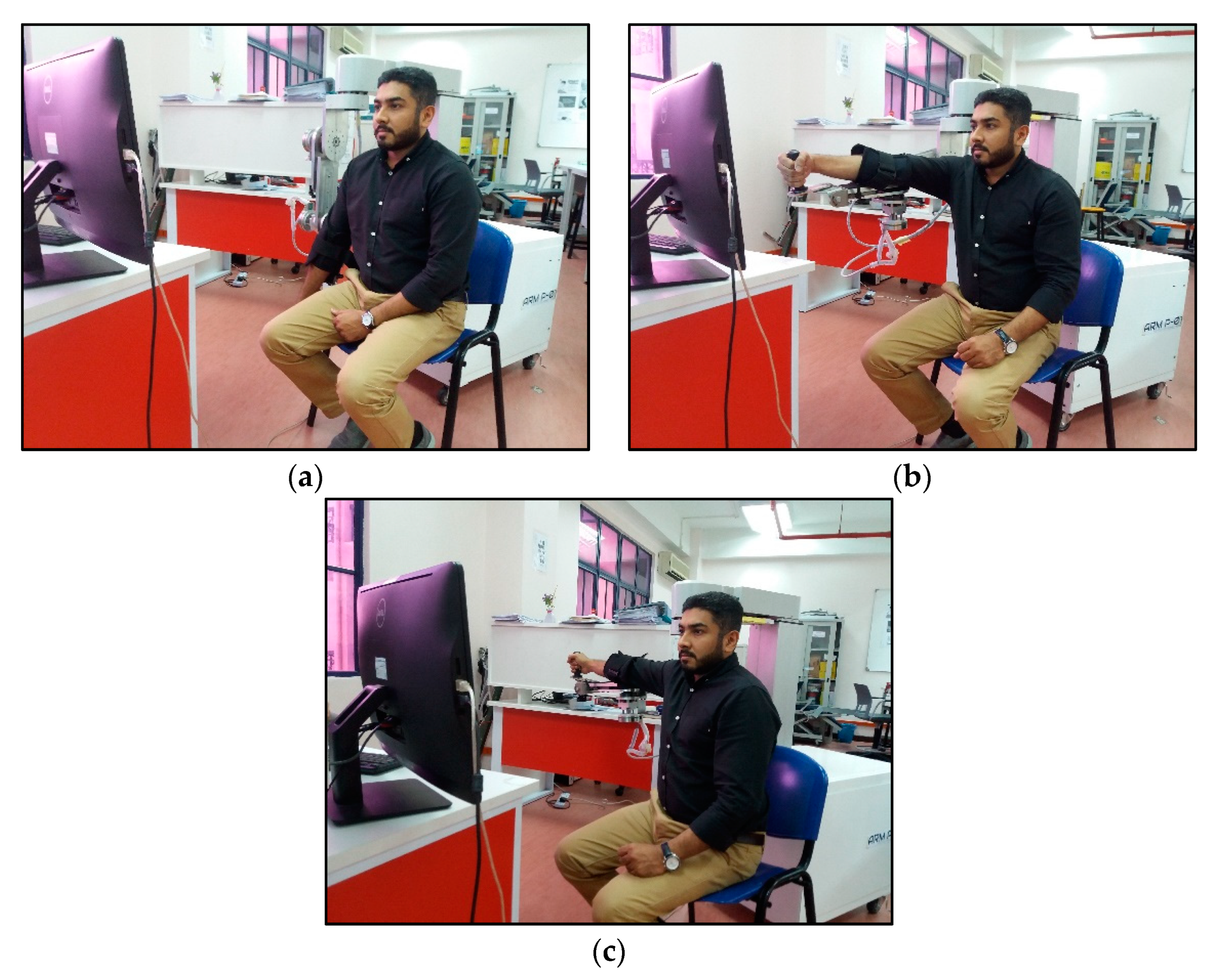
This paper presents a comparative analysis of Zeigler-Nichols, ABC and PSO to determine the tuning parameters of a two-degree-of-freedom (2-DOF) PID controller for robotic arm exoskeleton RAX-1. The objective of applying the mentioned optimization algorithms is to establish the optimal control parameters of the 2-DOF PID by minimizing cost, and to meet the prescribed performance criteria. Four different objective functions, i.e., integral square error (ISE), integral time square error (ITSE), integral absolute error (IAE) and integral time absolute error (ITAE), have been investigated to find the controller with optimal or near optimal load disturbance response subject to robustness and maximum sensitivity constraints. Maximum sensitivity represents the inverse of the minimum distance on the Nyquist plot between critical point and loop transfer function. Such a method for tuning the controller parameters has proven to be effective for robust performance [
21]. Furthermore, performance parameters such as overshoot, rise time, settling time and maximum sensitivity are normalized and the least average error (LAE) is evaluated. The optimal solution found for 2-DOF PID for RAX-1 is then implemented with the RAX-1 hardware for trials with three healthy subjects. The rest of the paper is organized as follows.
Section 2 explains the controller design,
Section 3 presents the simulation results,
Section 4 provides the comparative analysis and discussion.
Section 5 concludes the paper.
2. Methodology
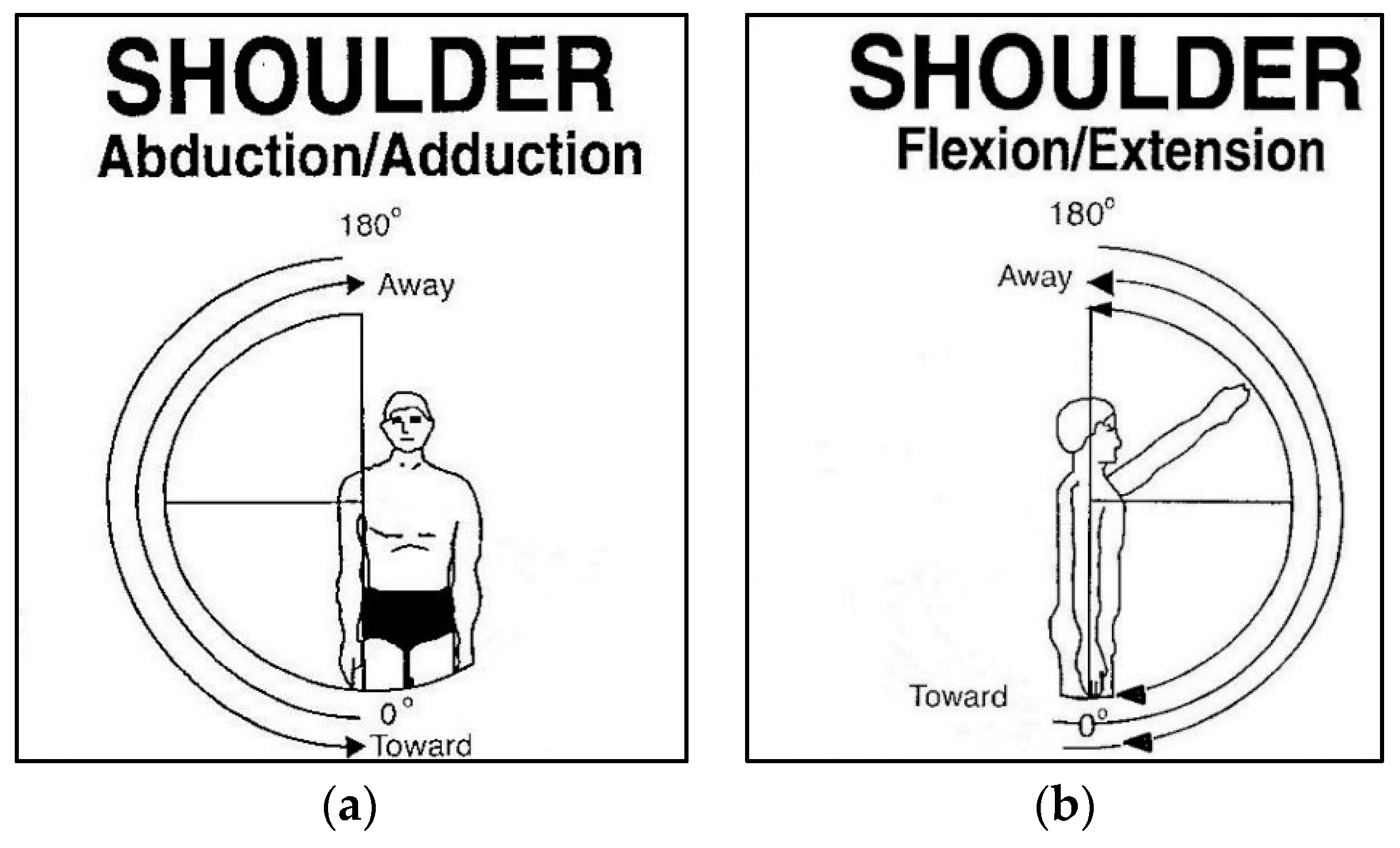
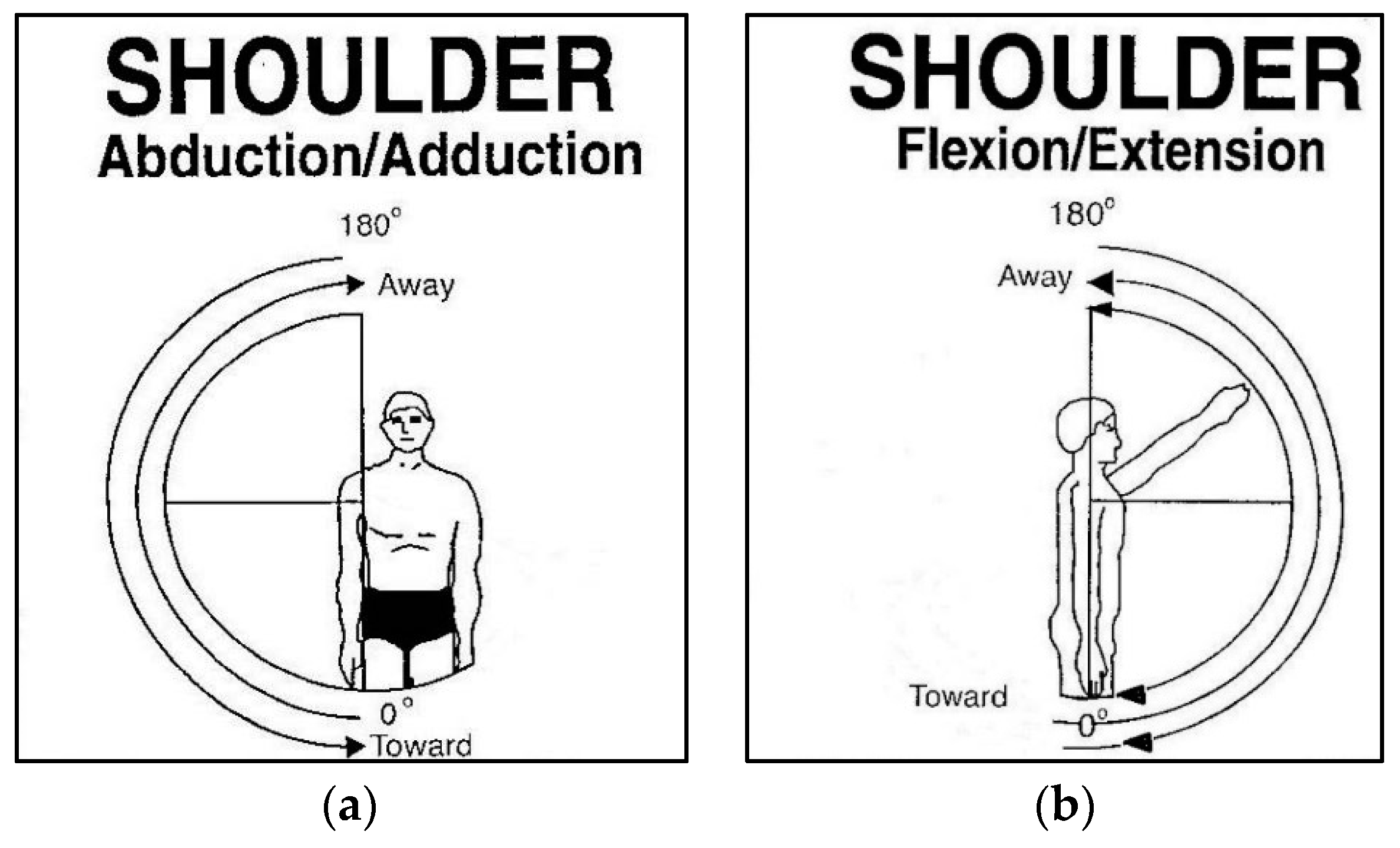
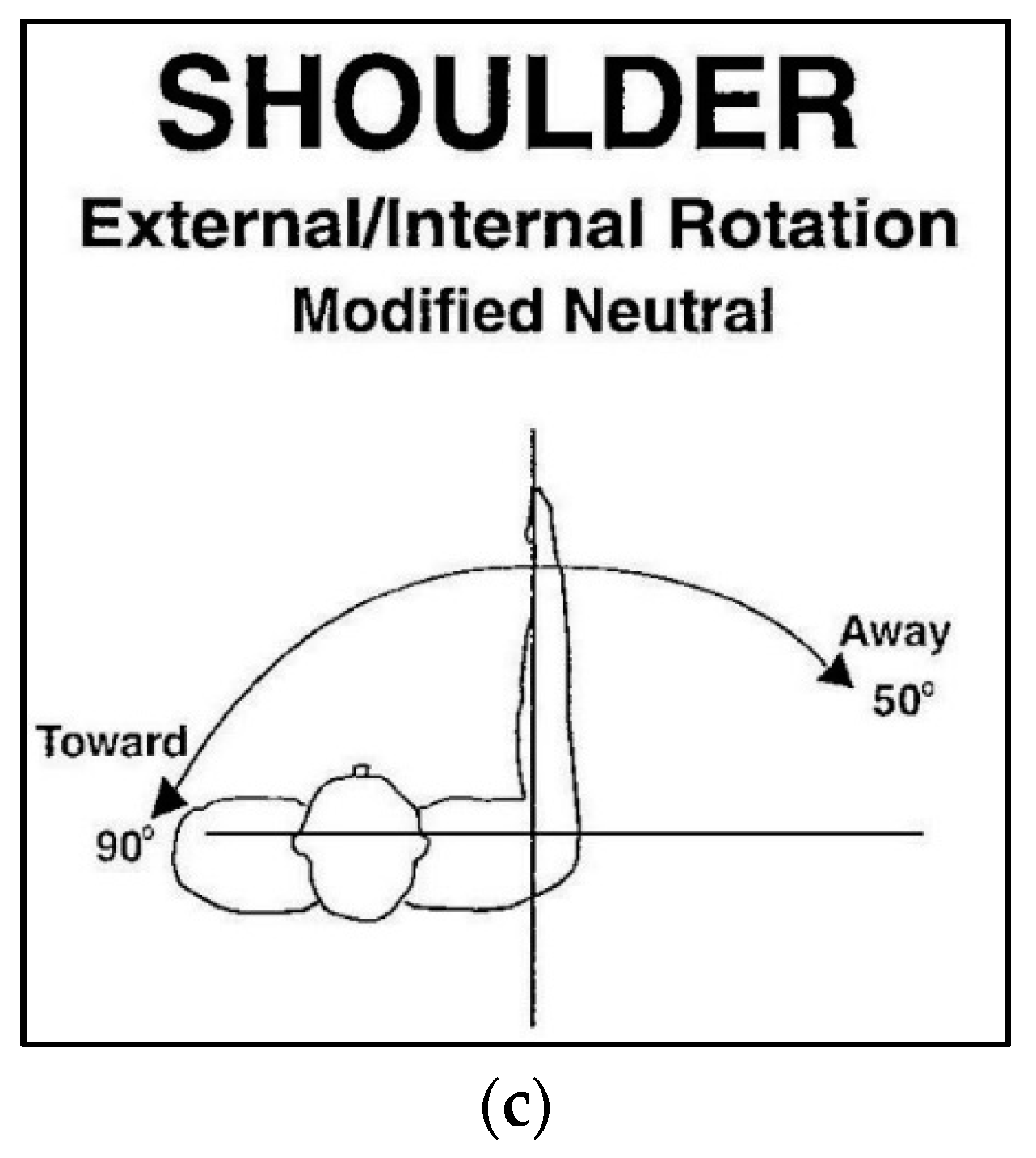
RAX-1 is an exoskeleton device meant to be used for rehabilitation of upper limb extremities. Operating alongside the human arm, exoskeleton devices are required to produce movements similar to those performed by the upper limb. There are nine DOFs in the upper limb, excluding finger joints. This study focuses on the glenohumeral joint in the shoulder, which is a complex ball-and-socket joint that enables the shoulder to perform movements in three DOFs. These movements are commonly referred to as shoulder extension/flexion, abduction/adduction and medial/lateral rotation, also known as internal/external rotation.
Figure 1 represents the three movements that can be performed with the shoulder joint. The ranges of motion for the shoulder joint movements performed by a healthy subject are listed in
Table 1 [
22]. These movement protocols are then implemented on RAX-1.
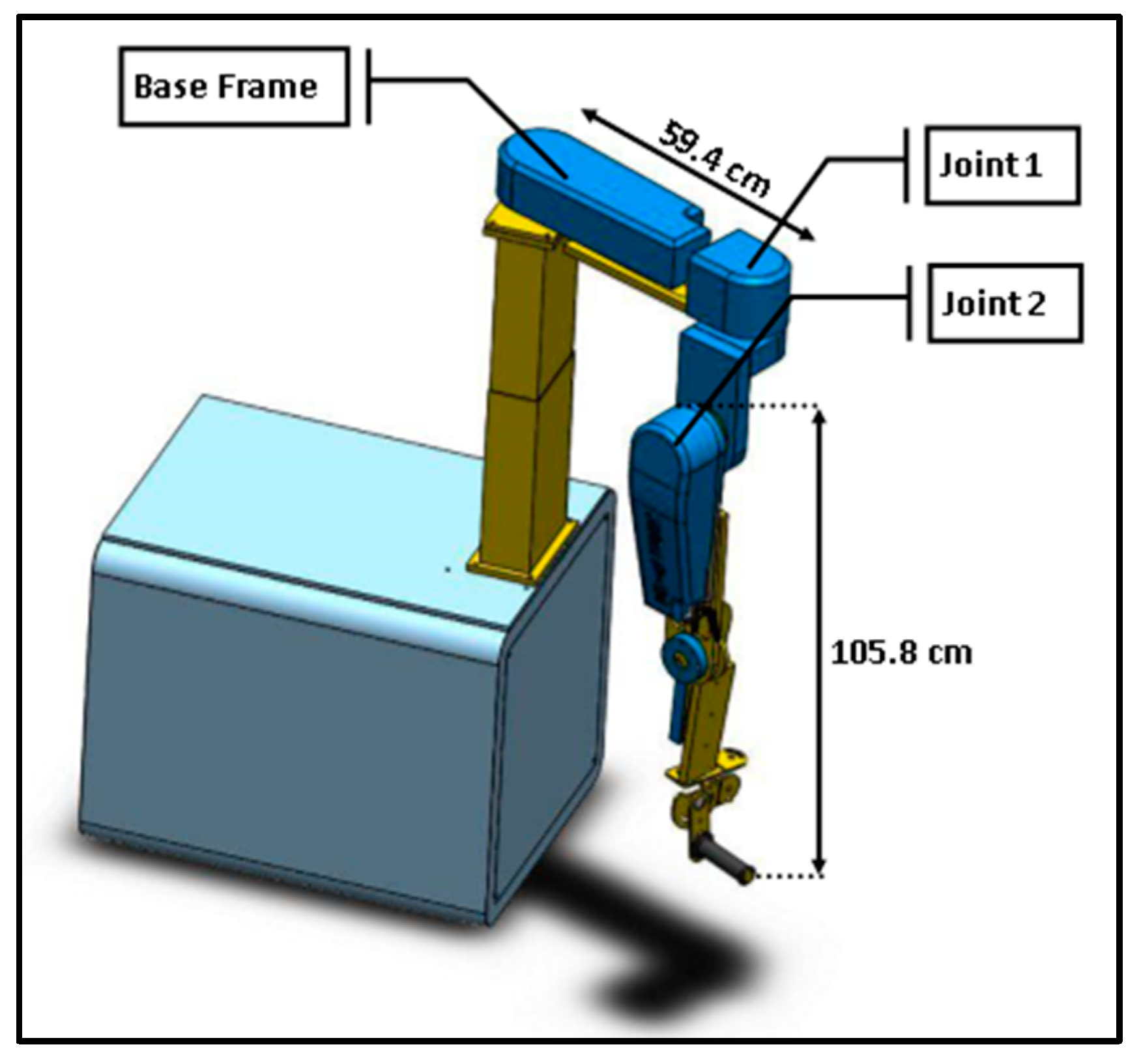
2.1. System Design
The robotic manipulator in the present study comprises two shoulder joints. The DOF of the manipulator can be calculated by the numbers of links and joints. The 3D model of the robot is illustrated in
Figure 2.
A robot in the planner configuration is defined with three parameters (x, y, θ). However, robots are three dimensional in real-world applications; hence, there is a need for six parameters (x, y, z, yaw, pitch, roll) to describe the position and orientation of a robot in space.
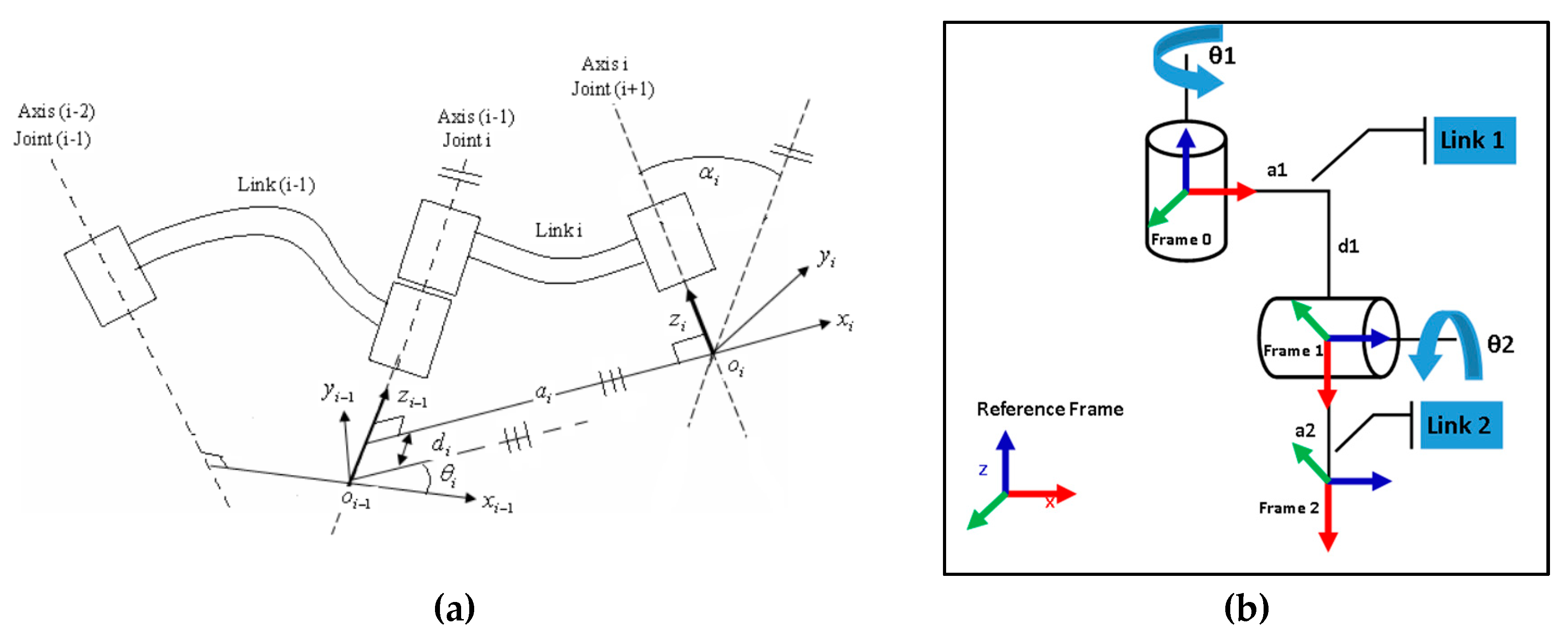
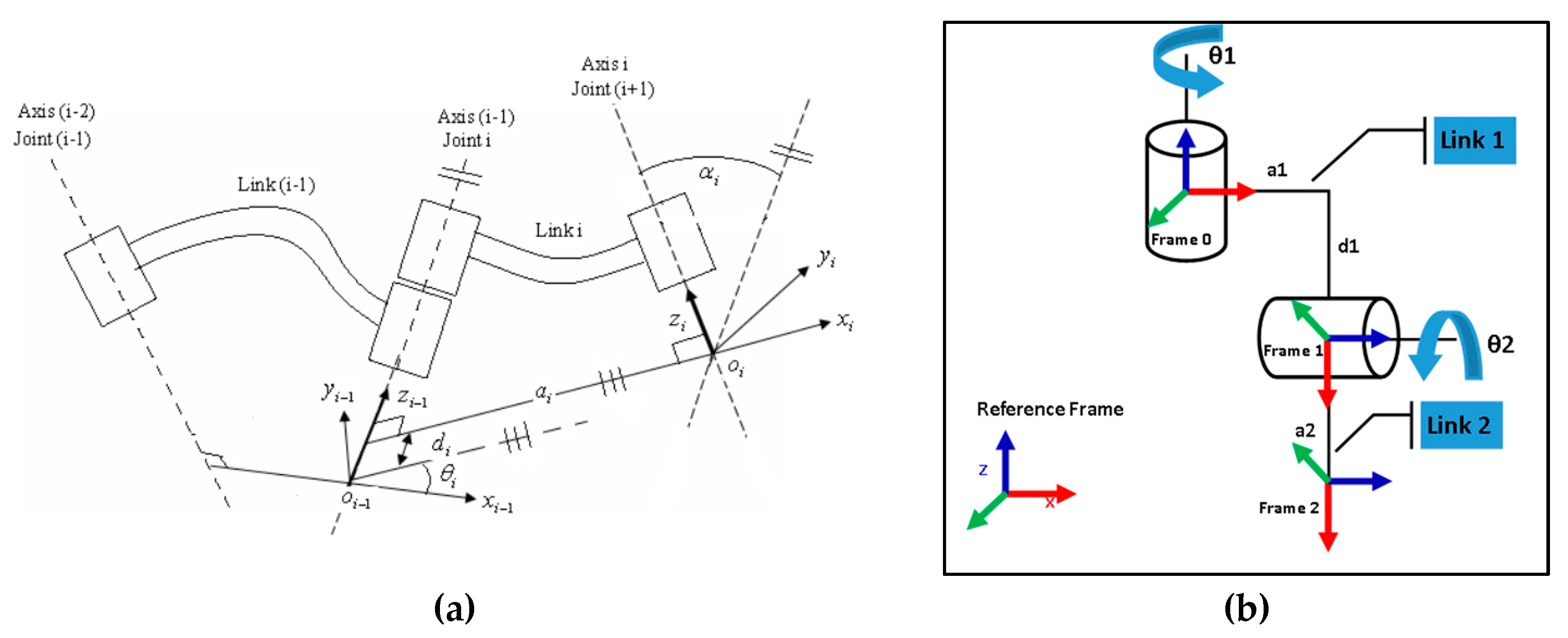
Figure 3 represents the direct kinematics of the robotic arm. Every rigid body in a serial chain has a label: Link 1 is the rigid body attached to the shoulder joint 1, Link 2 is the rigid body attached to Link 1 and so on. A joint is present between each link. Hence, Joint 1 attaches Link 1 to Link 0 and Joint 2 attaches Link 2 to Link 1. Frame of reference is numbered according to the respective links they are attached to, e.g. Frame 1 is attached to Link1. Eventually, the aim is to calculate the position of Frame 2 relative to that of Frame 0.
Figure 3a shows a pair of adjacent links which are link (
i − 1), and link (
i) with their associated joints, joint (
i − 1), and joint (
i). A frame (
i) is assigned to link (
i) as follows.
The Denavit-Hartenberg (DH) parameters of a rigid link depends on four geometric parameters (
ai, αi, di,
θi) [
23]. The four parameters describe any revolute joint as follows:
ai (Link length) is a distance measured along the xi axis from the point of intersection of xi axis with zi − 1 axis to the origin of frame (i).
αi (Link Twist) is the angle between the joint axes zi − 1 and zi axes measured about xi axis in the right-hand orientation.
di (offset) is the distance measured along zi − 1 axis from the origin of frame (i − 1) to the intersection of xi axis with zi − 1 axis.
θi (Joint angle) is the angle between xi − 1 and xi axes measured about the zi − 1 axis in the right-hand sense.
The 2-DOF upper limb robotic manipulator can be calculated from
Figure 3b. The transformation matrix from Frame 0 to the end-effector can be defined as:
where
cm,
cm and
cm. The transformations can be used to determine kinematic measurements of the joints. For any joint angle, the position of the end effector can be derived from the transformation matrix.
2.2. Dynamic Model
In this study, Euler-Lagrangian approach was applied to calculate the dynamics of the robot manipulator. This approach uses the joint velocities and position to determine the kinetic and potential energies of a system. It generalizes Newtonian mechanics for systems that are subject to a specific class of constraints. These constraints are often expressed in terms of the position or variables describing the system in question.
The Lagrangian equation of motion defined in (1) is written as:
where
denotes the required torque, L = K − P (Kinetic and potential energies) is the Lagrangian and
qj is the generalized coordinate of the
jth joint of robot.
The inertial matrix
can be determined as follows:
where
,
. Simplifying (2), one can obtain the following (3).
The correction term Christoffel symbols ensures that when the derivatives of the vector field lying in a tangent plane of the configuration manifold are computed, they stay in the same tangent space. The Christoffel symbols in (4) are defined as
The potential energy of each joint
, is the product of the mass of that link
, position vector to the centre of mass
and acceleration due to gravity
:
The term
is a function of generalized coordinates that does not depend on their derivatives. It is given by the partial derivative of potential energy of the system with respect to the generalized coordinates as follows:
Finally, the dynamic equations of the system after substituting various quantities and omitting zero can be expressed as
which, in general can be written in matrix form as:
Here, denotes the inertia matrix of the system and gives the Christoffel symbols and is actually which is determined by taking partial derivative of potential energy with generalized coordinates. is a 2 × 1 matrix representing the generalized active forces.
2.3. Linearized Model
The linearized state space model for robot exoskeleton (RAX-1) is expressed as follows.
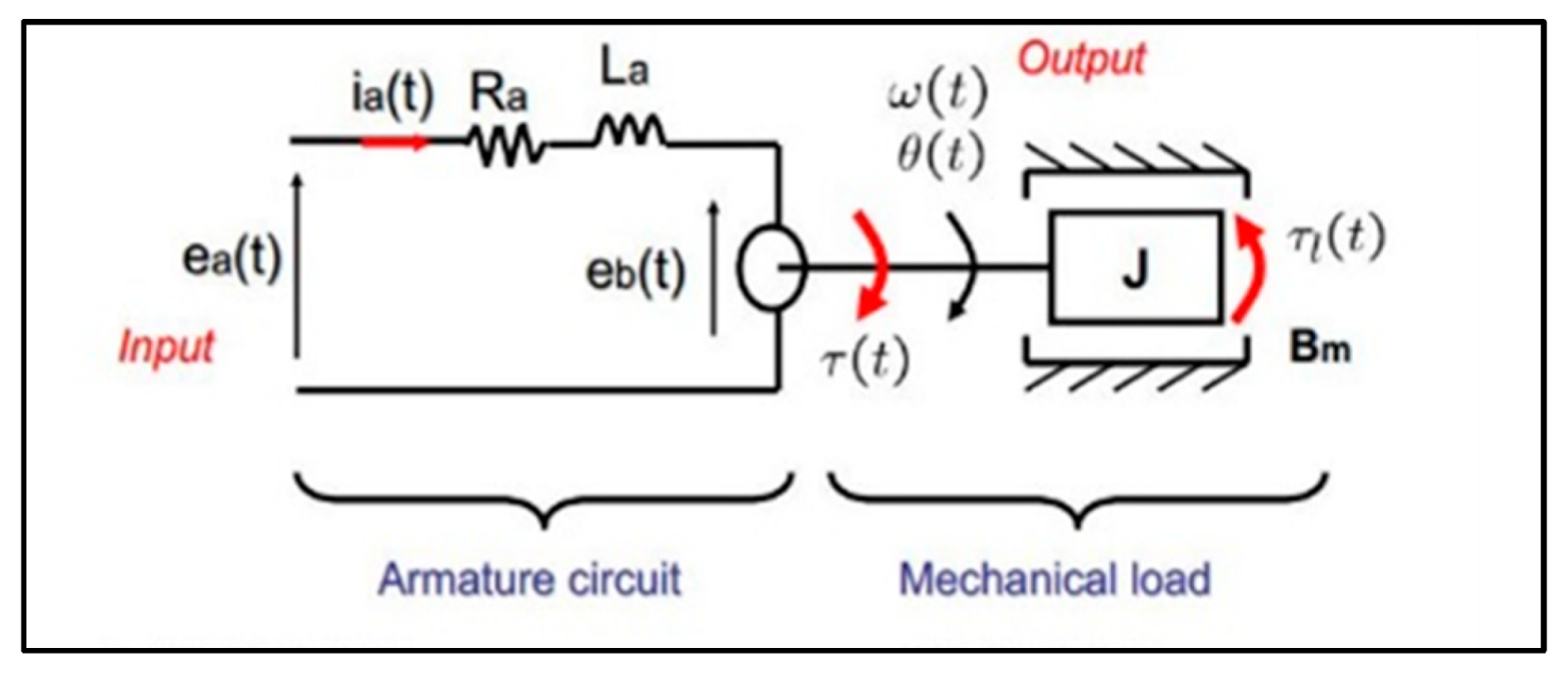
2.4. Motor Model
The robot manipulator requires actuators to provide the desired amount of torque at the joints. The actuators convert electrical energy into rotational mechanical energy. DC motors are widely used in robotics as actuators due to their high torque, speed controllability and portability [
24]. The internal model of DC motor is illustrated in
Figure 4 and can be expressed as follows.
Here,’
’ is the motor inertia, ‘
’ motor damper, ‘
’ is the motor constant, ‘
’ is the proportionality constant between angular velocity of the motor and back emf, whereas ‘
’ and ‘
’ inductance and resistance of the armature. If
then, an approximated transfer function of motor is obtained by setting
. This converts motor model from a second order system to 1st order system. DC motors with harmonic gears are used in this system.
Table 2 lists the motor parameters.
6. Conclusions
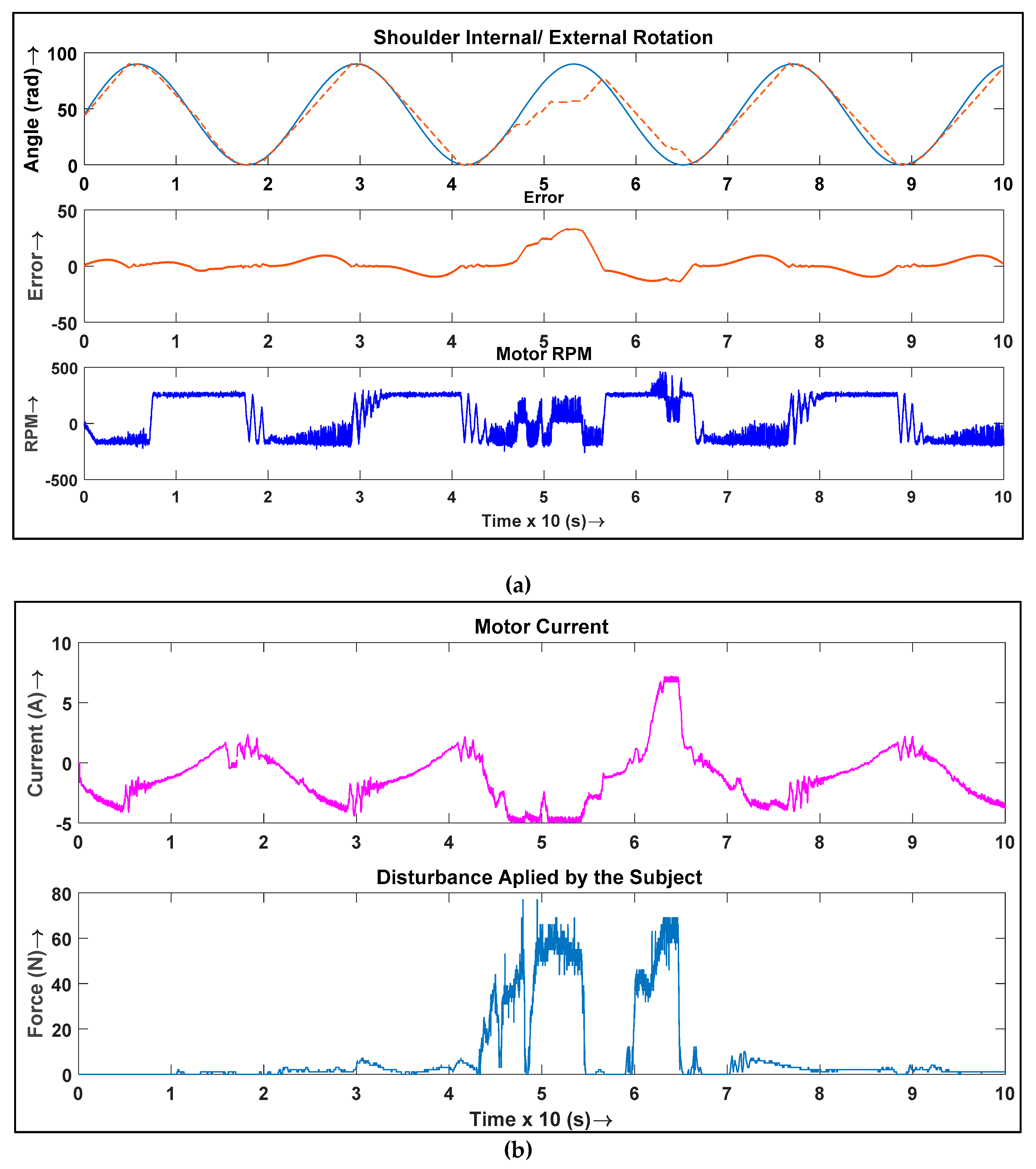
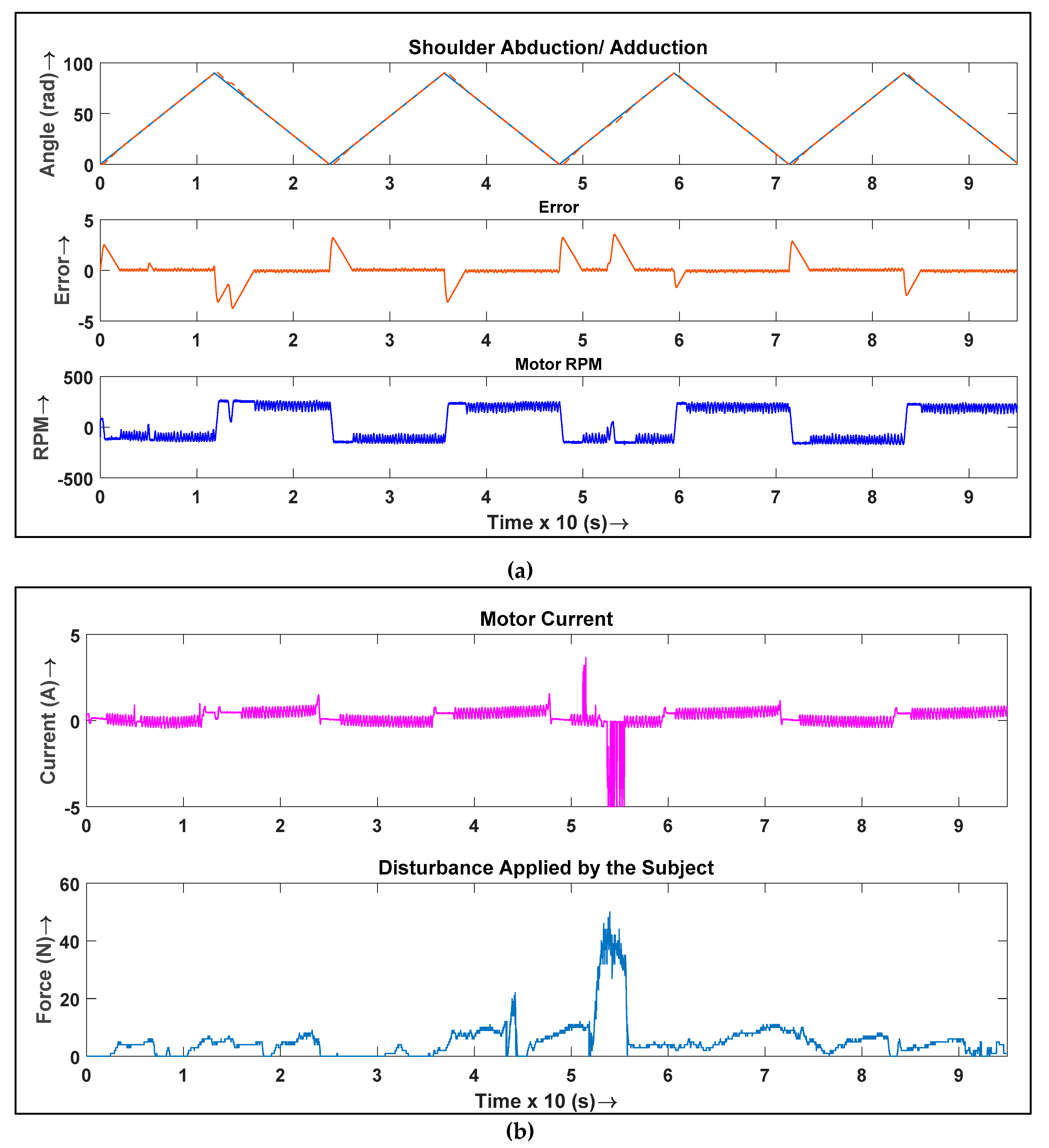
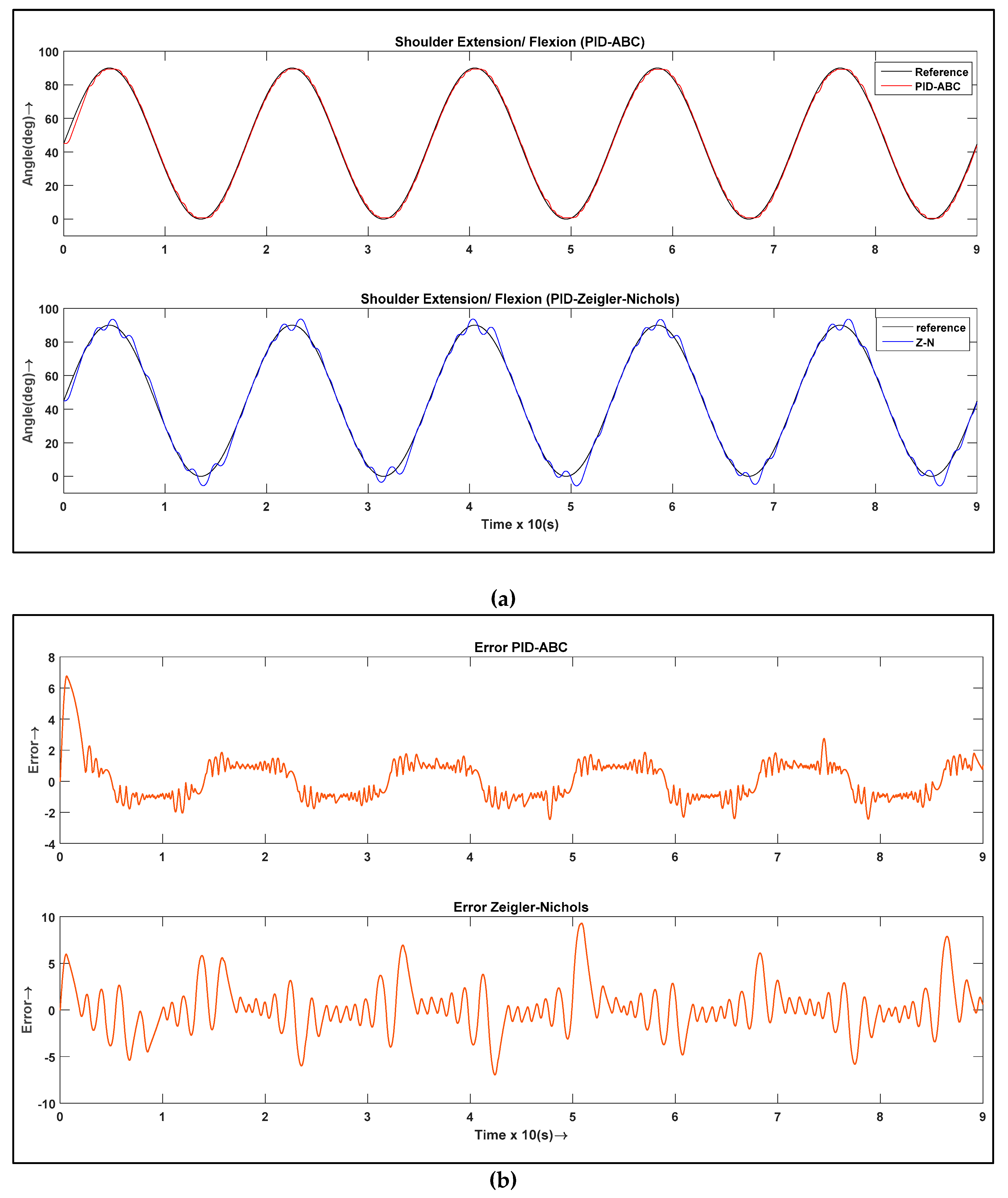
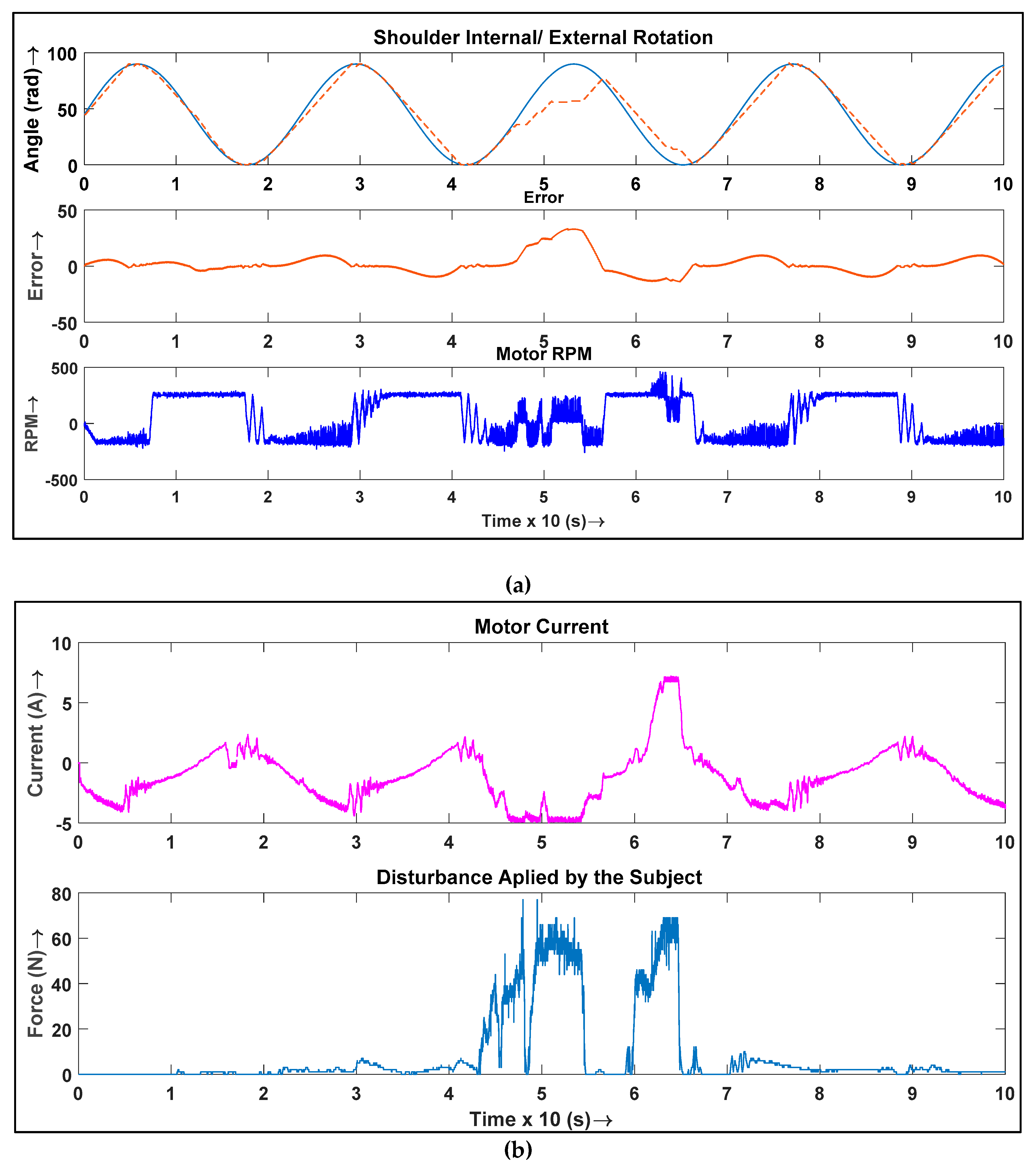
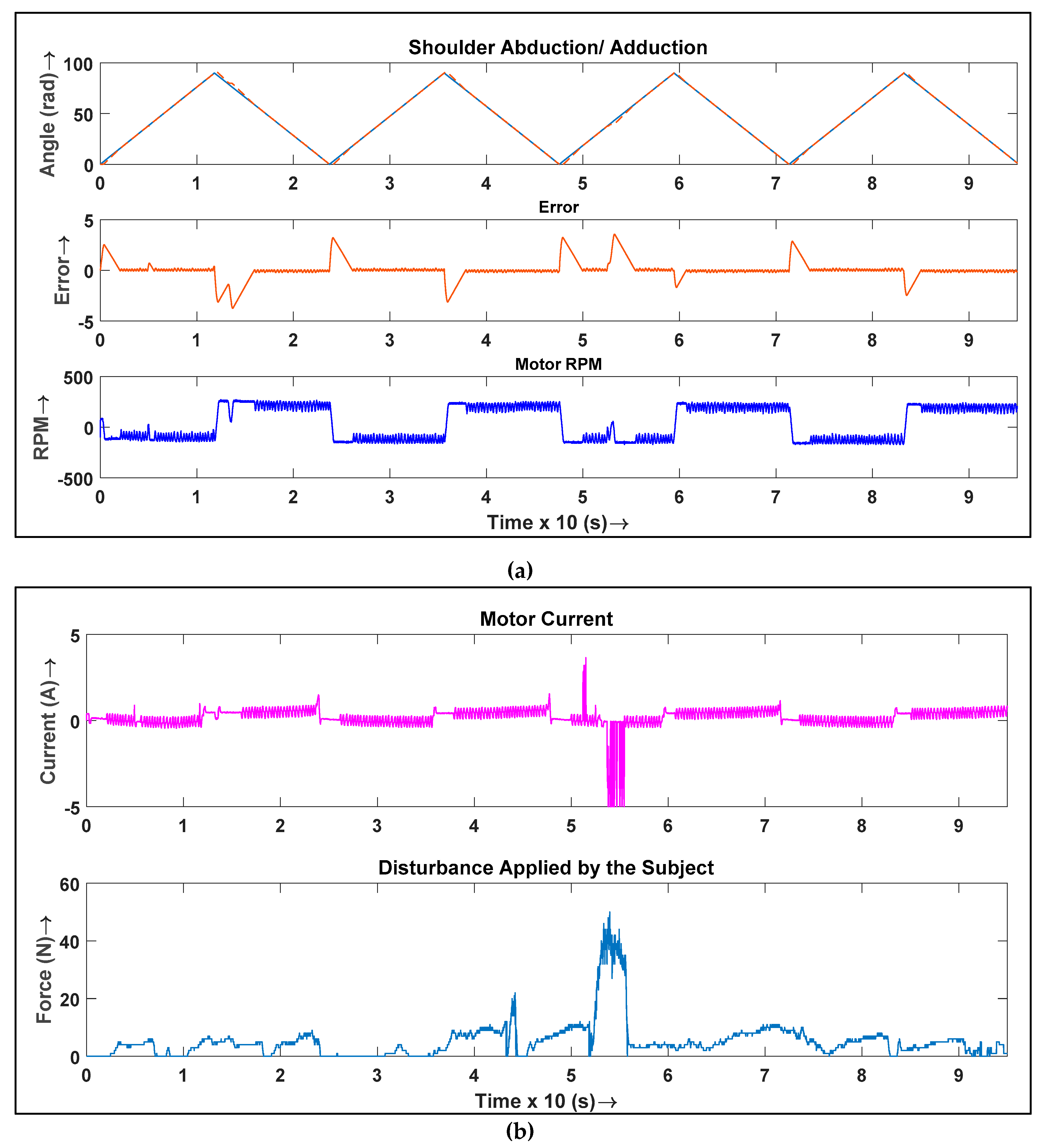
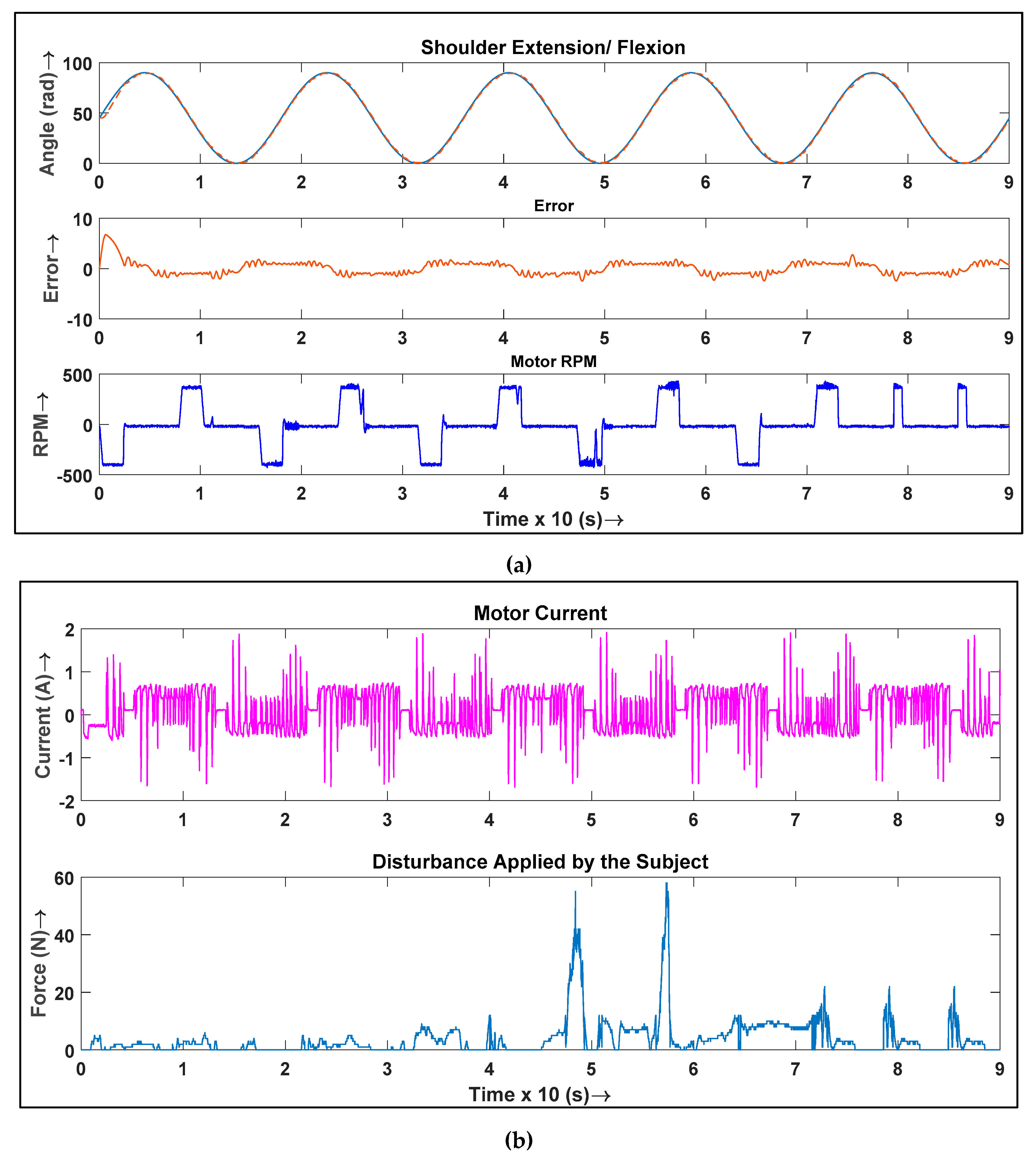
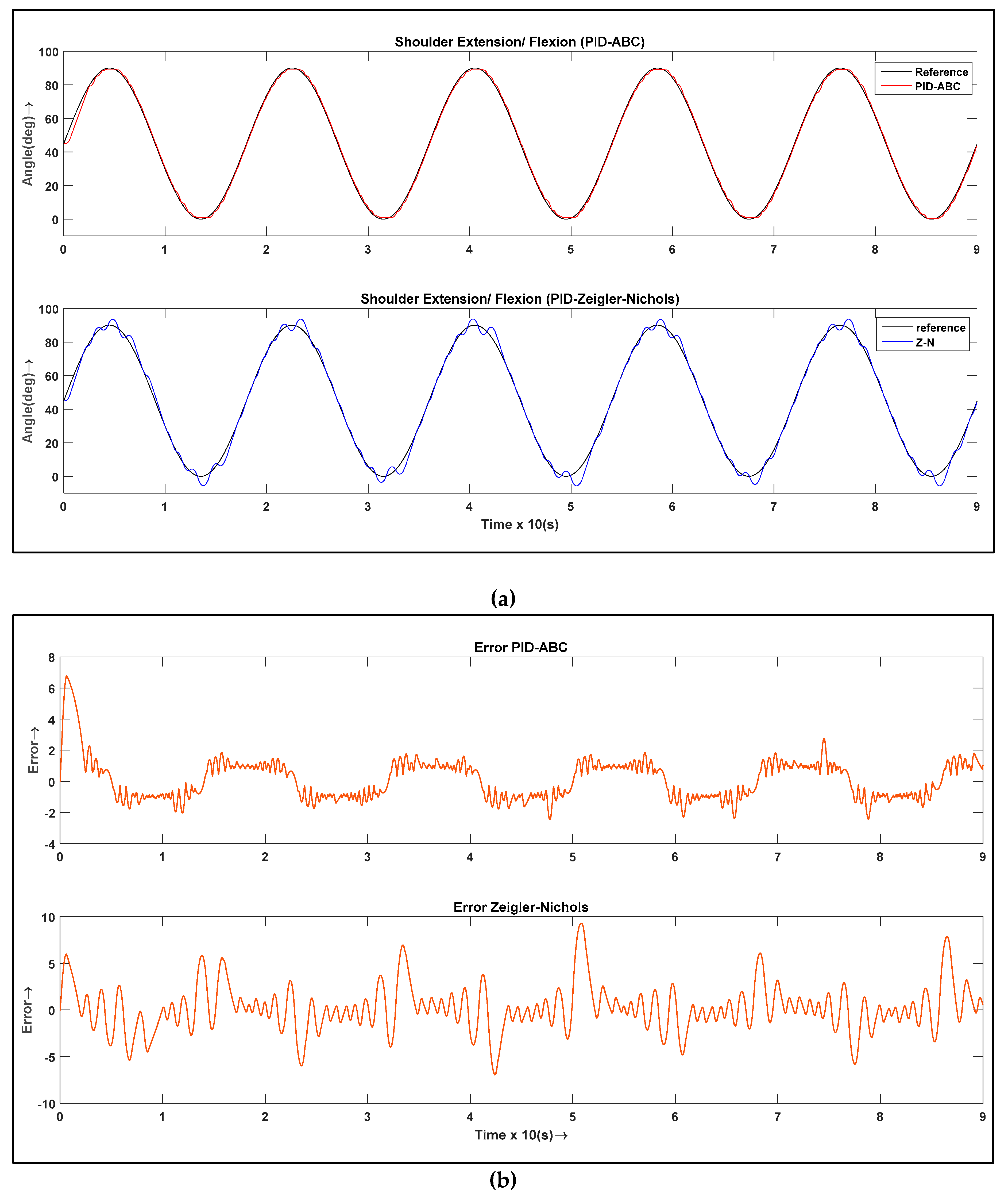
Rehabilitation robotics have been studied for decades, but few researchers have ever considered using optimization techniques for gait training. This paper presents PSO- and ABC-based tuning techniques for a 2-DOF PID controller used in the robot controlling trajectories of different exercise movements performed by the shoulder joints, namely internal/external rotation, abduction/adduction, and extension/flexion. RAX-1 was used as a mechanical experimental platform. The control parameters of the PID controller were tuned using the ABC and PSO algorithms as well as the Zeigler-Nichols method. The simulation results demonstrated better feasibility of the proposed controller in terms of robustness. An ABC-optimized PID controller was also implemented into the hardware for three subjects, with each performing different exercises. It was necessary for the robot to perform steady motion with no steady state error during the process of rehabilitation, as any abrupt movement could dislocate the shoulder joint. The hardware results showed that the controller could trace the desired trajectory with a very minute overshoot in the response and significantly low response times, which are desirable in rehabilitation. Finally, this study compared the performance of PID controllers optimized with ABC and the Zeigler-Nichols method, respectively. The controller tuned using the Zeigler-Nichols method demonstrated a decent rise time but large overshoot in the response, which is dangerous for rehabilitation applications. However, the hardware response of the system had less overshoot and no steady-state error when the ABC optimizer was used to tune the PID parameters. In summary, this study focused on finding optimal parameters of the PID controller used in an upper limb rehabilitation robotic system. In the future, we plan to broaden the spectrum of this study by incorporating various protocols related to the elbow and wrist rehabilitation with an updated mechanical structure. Analysis with other notable optimization techniques such as firefly and ant colony algorithms will be further investigated to compare their parameters and validate their capabilities in rehabilitation applications.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}