A New Seven-Segment Profile Algorithm for an Open Source Architecture in a Hybrid Electronic Platform




Abstract
1. Introduction
2. Background
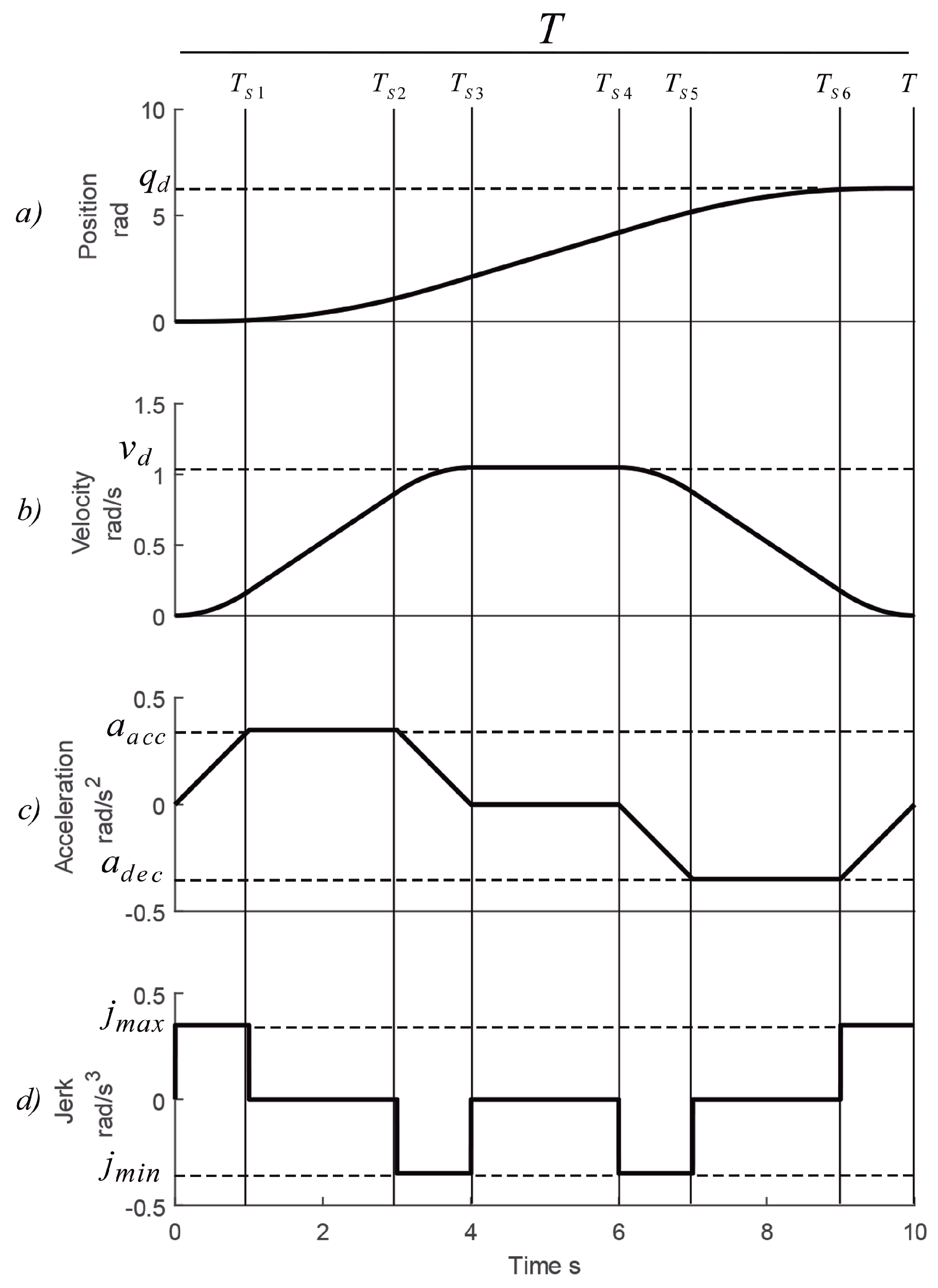
2.1. General Model of the Seven-Segment Velocity Profile
2.2. Proposed Method to Compute the Desired Jerk
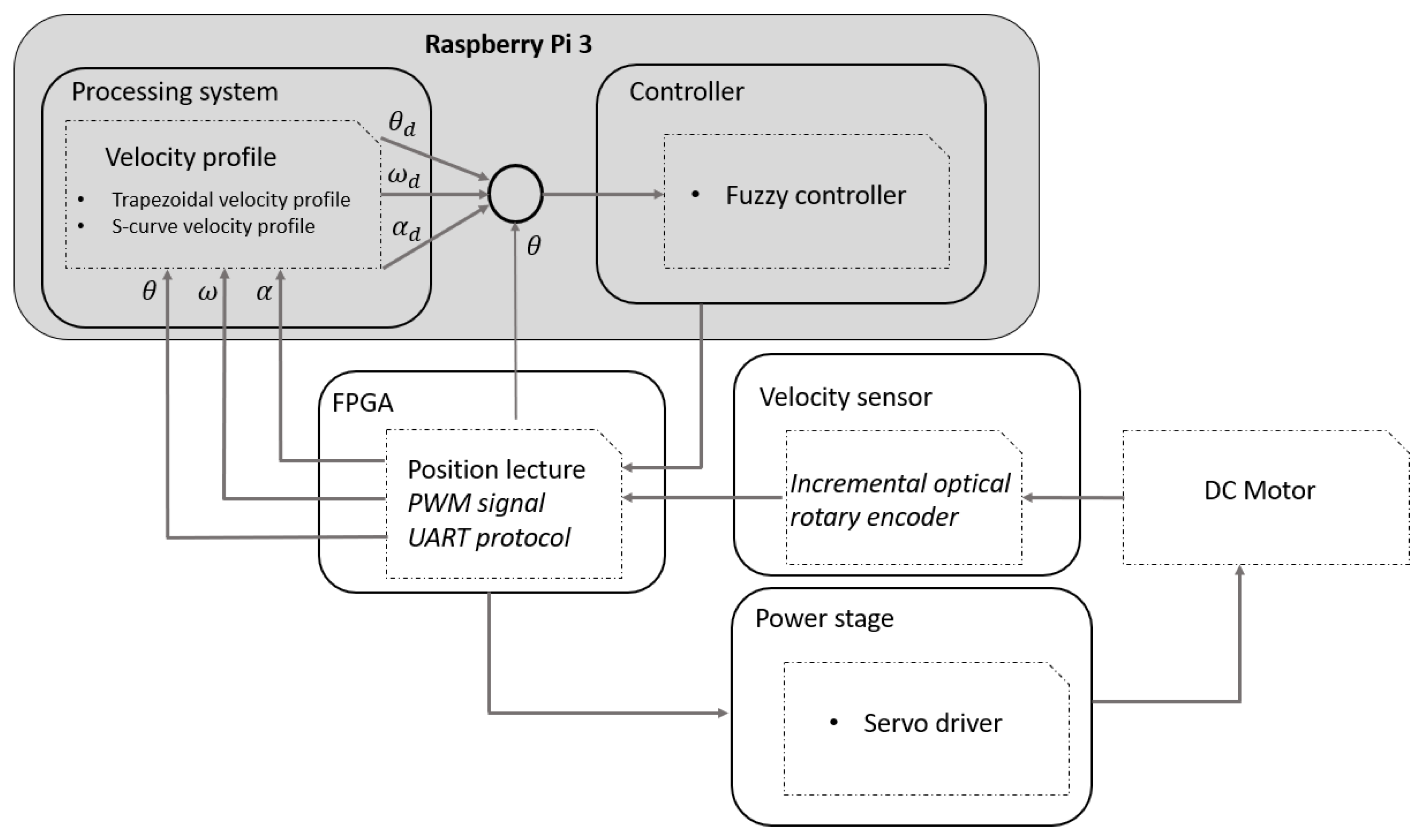
3. Methods and Experimentation
S-Curve Velocity Profile Parameters
4. Simulation and Results
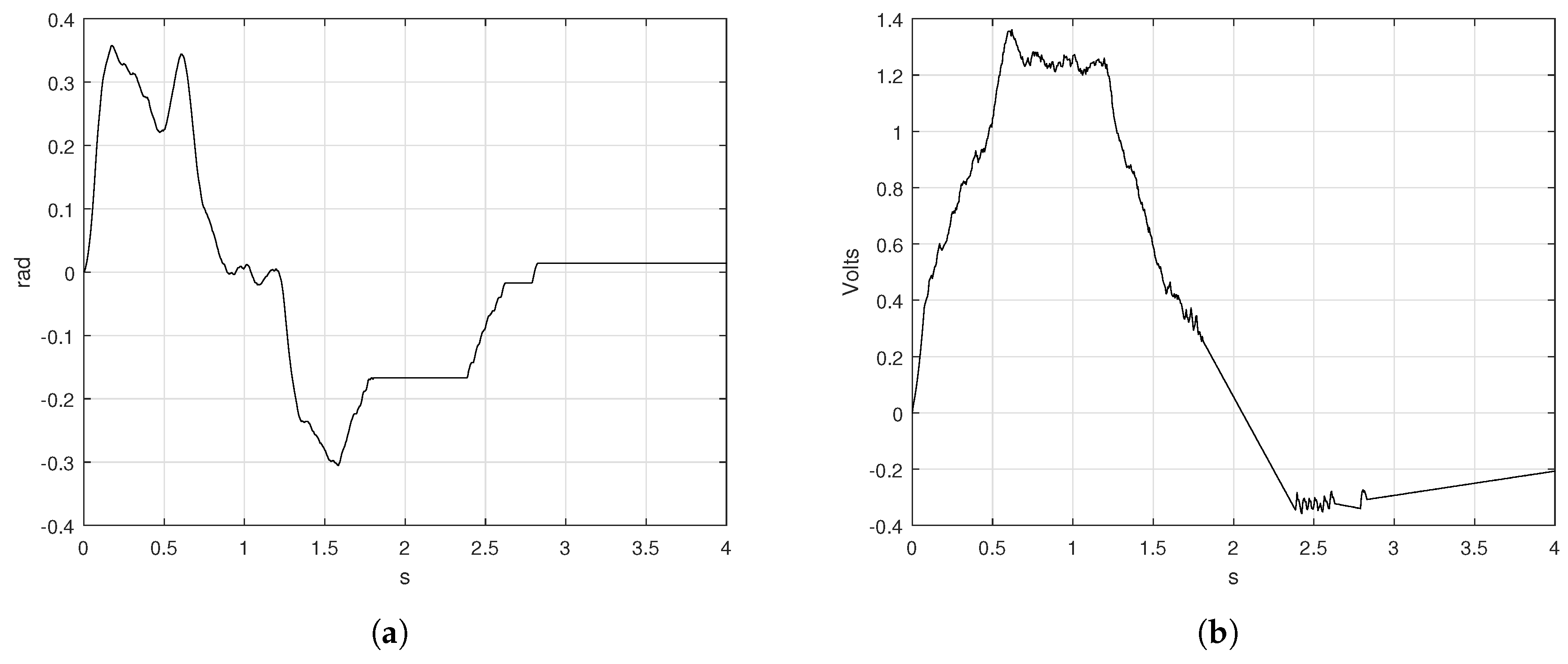
4.1. Trapezoidal Velocity Profile
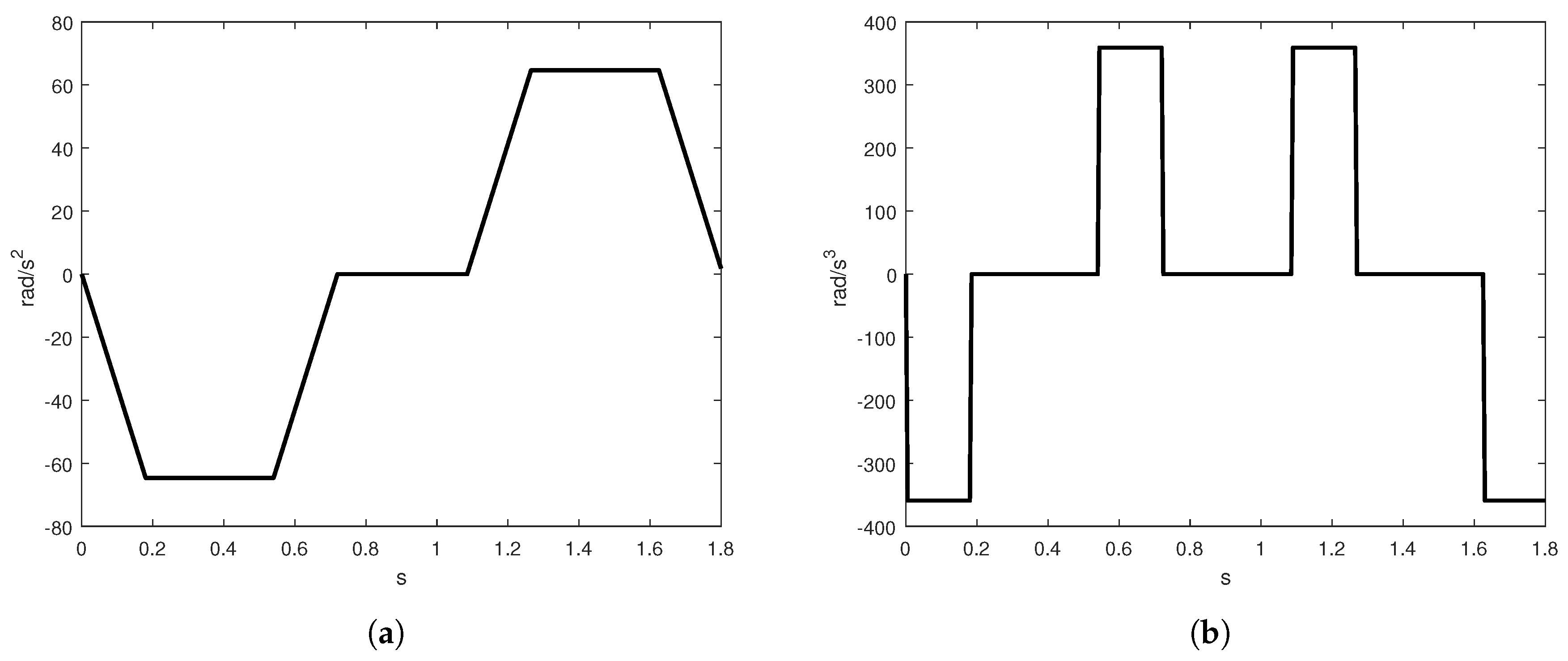
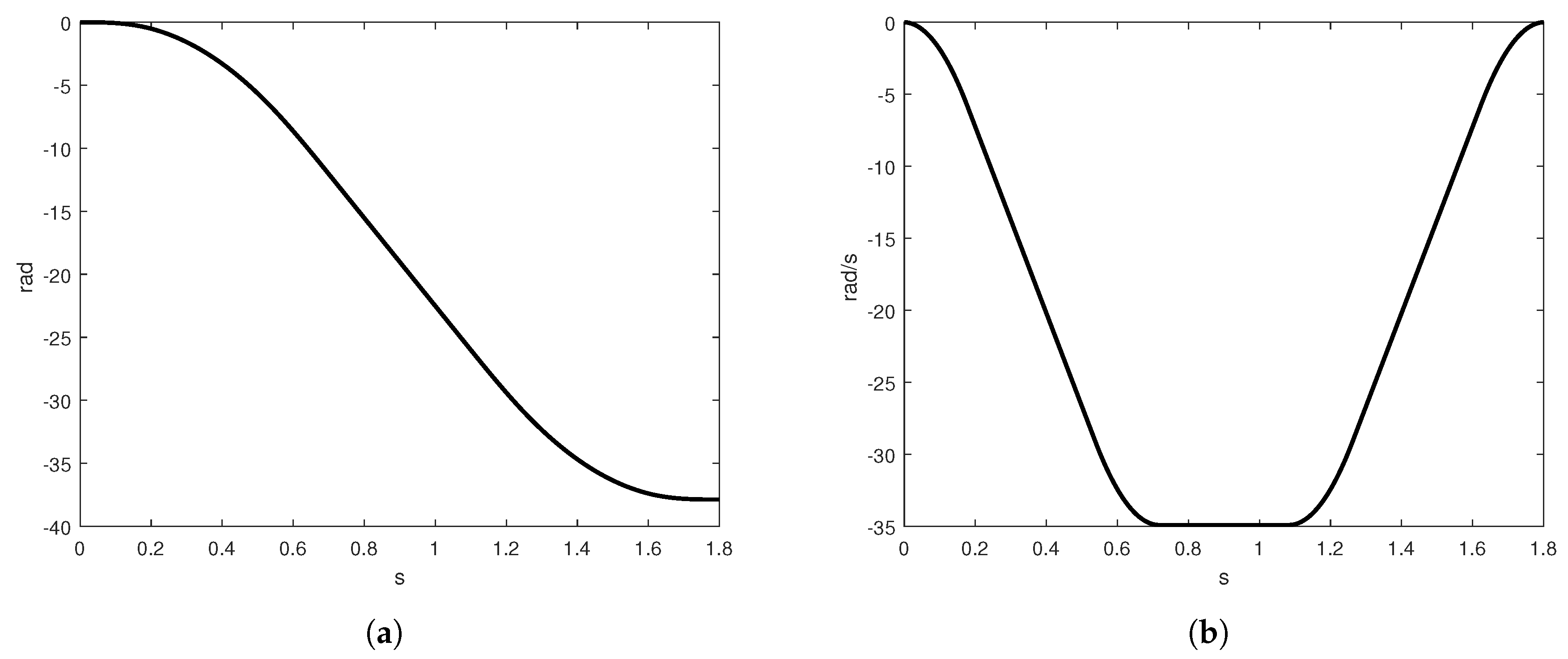
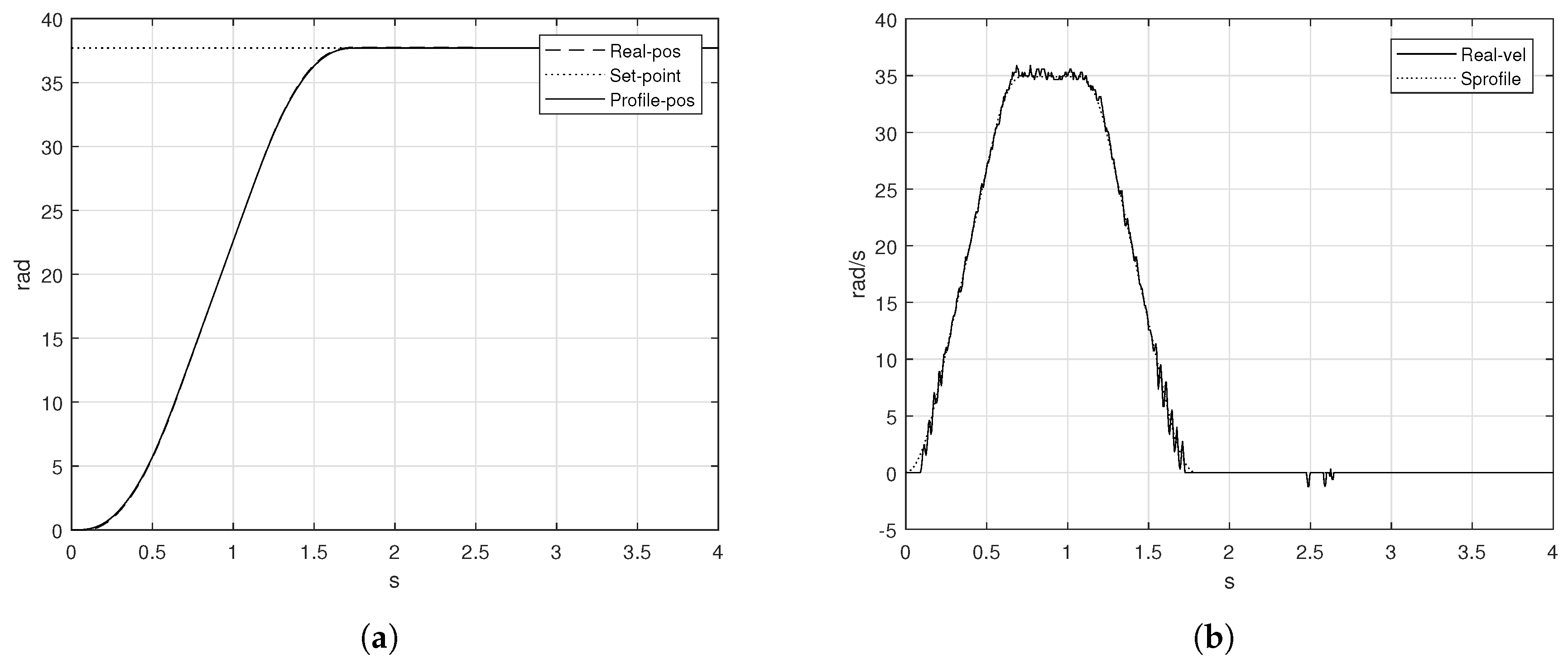
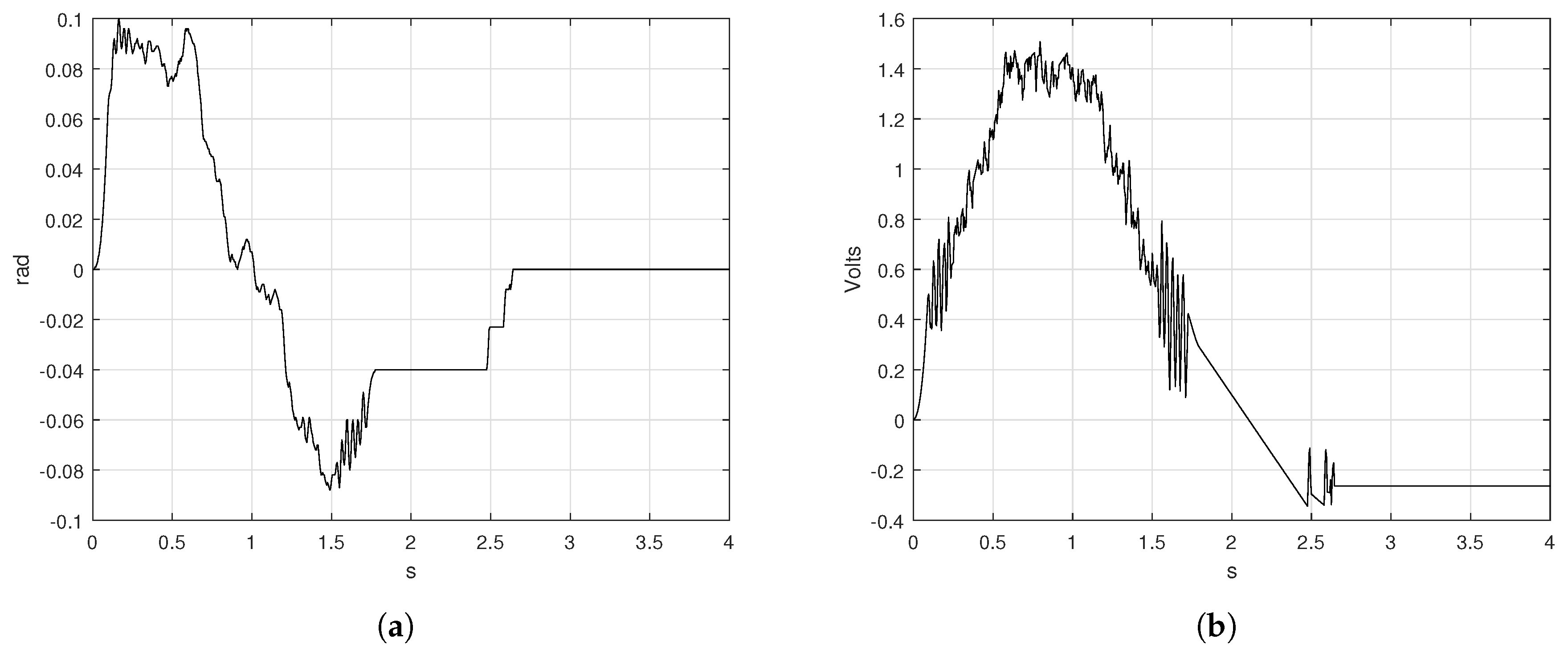
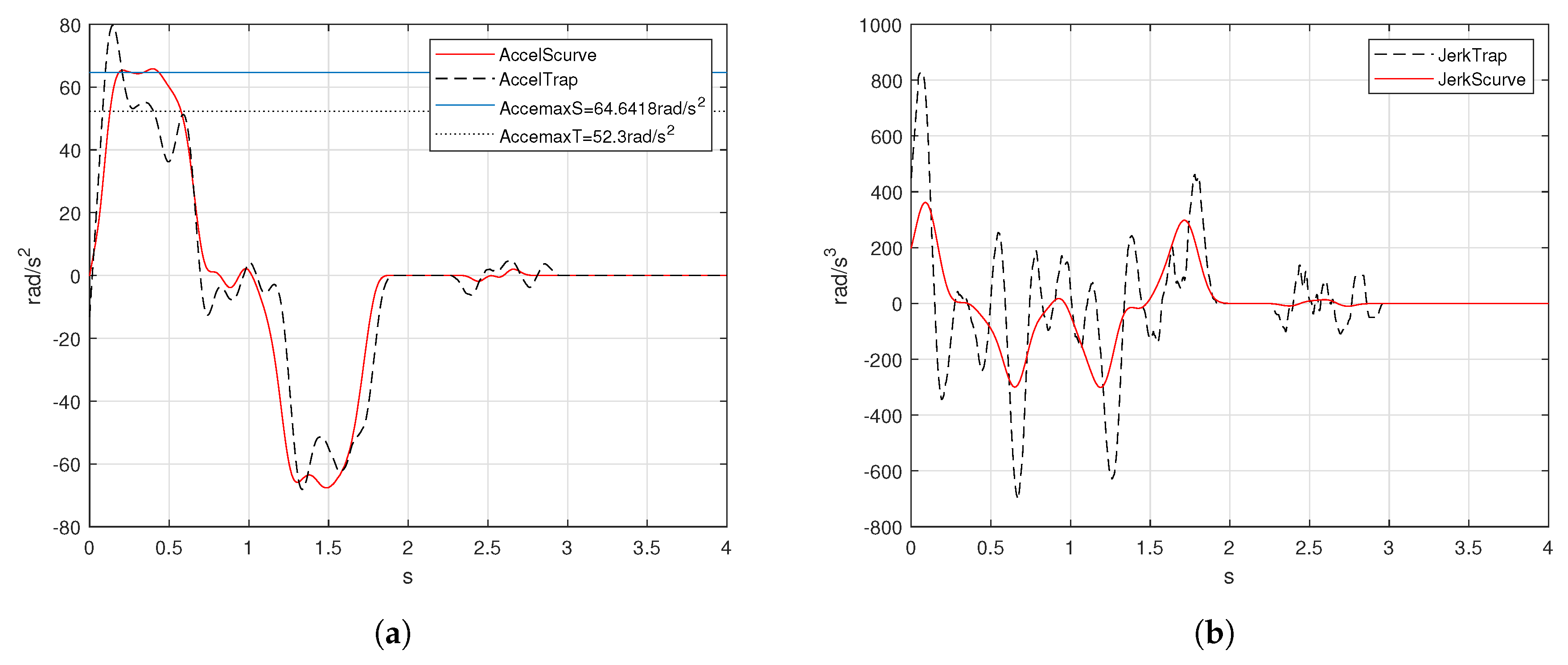
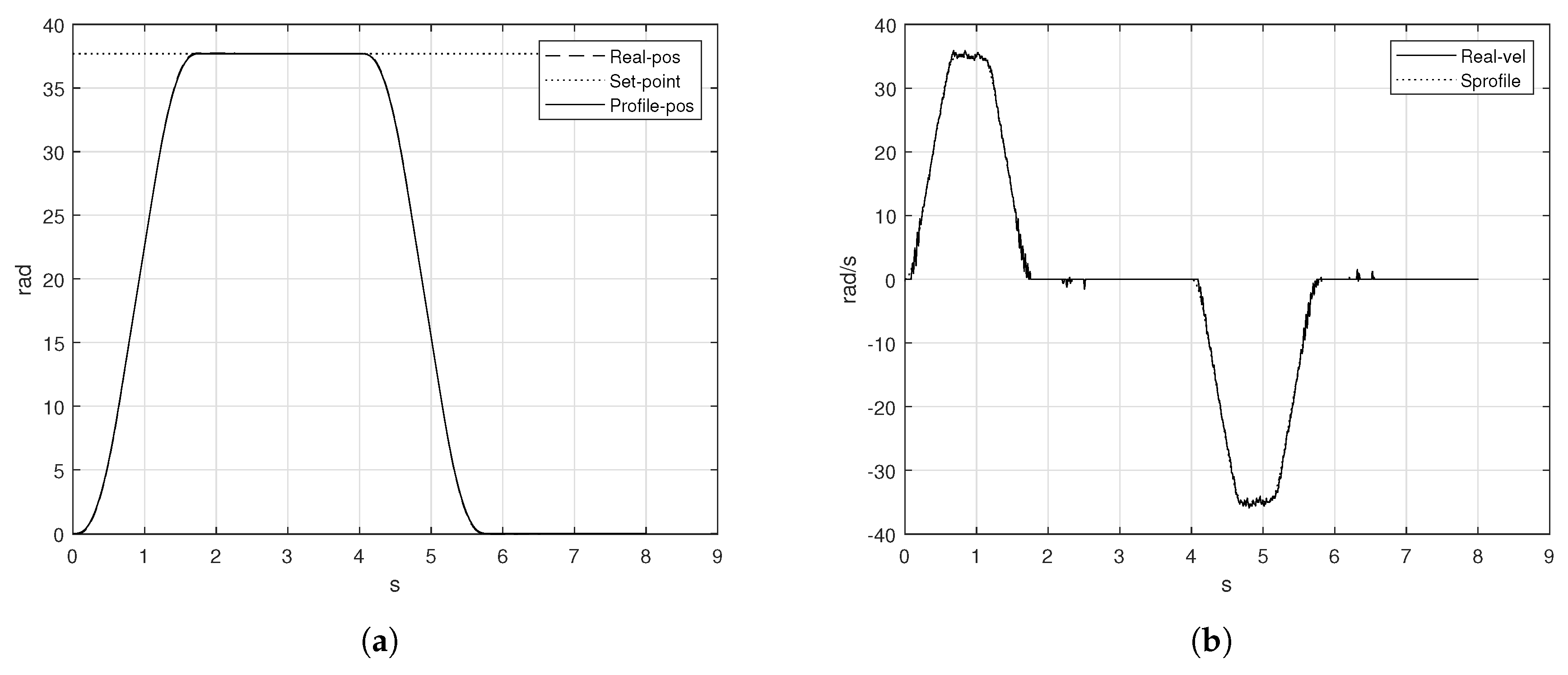
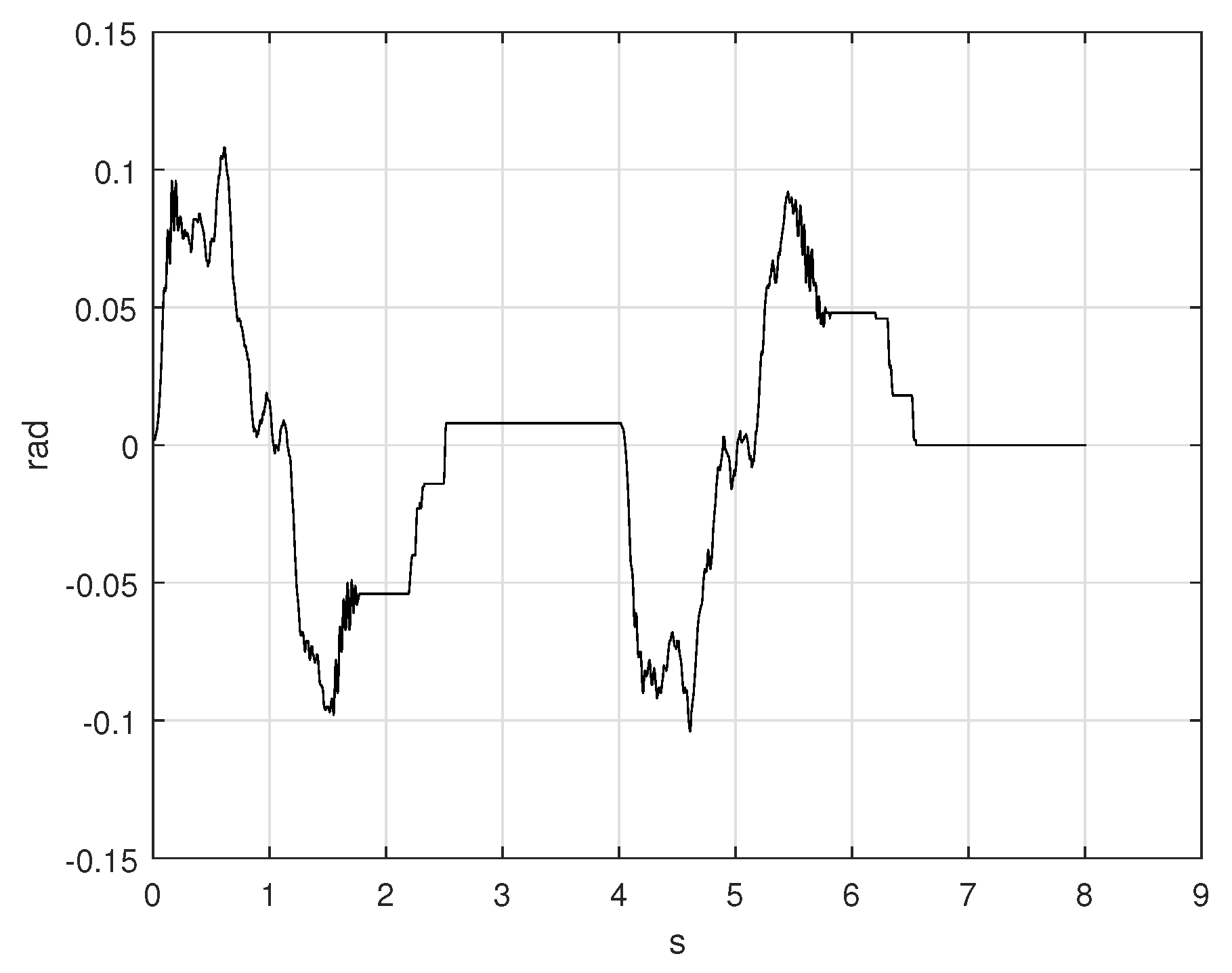
4.2. S-Curve Velocity Profile Implementation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Erkorkmaz, K.; Altintas, Y. High speed CNC system design. Part I: Jerk limited trajectory generation and quintic spline interpolation. Int. J. Mach. Tools Manuf. 2001, 41, 1323–1345. [Google Scholar] [CrossRef]
- Martínez, J.R.G.; Reséndiz, J.R.; Prado, M.Á.M.; Miguel, E.E.C. Assessment of jerk performance s-curve and trapezoidal velocity profiles. In Proceedings of the 2017 XIII International Engineering Congress (CONIIN), Santiago de Queretaro, Mexico, 15–19 May 2017; pp. 1–7. [Google Scholar]
- Osornio-Rios, R.A.; de Jesús Romero-Troncoso, R.; Herrera-Ruiz, G.; Castañeda-Miranda, R. FPGA implementation of higher degree polynomial acceleration profiles for peak jerk reduction in servomotors. Robot. Comput.-Integr. Manuf. 2009, 25, 379–392. [Google Scholar] [CrossRef]
- Rew, K.H.; Kim, K.S. A closed-form solution to asymmetric motion profile allowing acceleration manipulation. IEEE Trans. Ind. Electron. 2010, 57, 2499–2506. [Google Scholar] [CrossRef]
- Kim Doang Nguyen, T.C.N. On Algorithms for Plannin S-curve Motion Profiles. INTECH 2008, 5, 99–106. [Google Scholar]
- Piazzi, A.; Visioli, A. Global minimum-jerk trajectory planning of robot manipulators. IEEE Trans. Ind. Electron. 2000, 47, 140–149. [Google Scholar] [CrossRef]
- Zhang, Y.; He, L.; Luo, J.; Tan, H. Complete framework of jerk-level inverse-free solutions to inverse kinematics of redundant robot manipulators. In Proceedings of the 2016 35th Chinese Control Conference, Chengdu, China, 27–29 July 2016; pp. 4717–4722. [Google Scholar] [CrossRef]
- Jeon, J.K. An efficient acceleration for fast motion of industrial robots. In Proceedings of the IECON’95-21st Annual Conference on IEEE Industrial Electronics, Orlando, FL, USA, 6–10 November 1995; Volume 2, pp. 1336–1341. [Google Scholar] [CrossRef]
- Lloyd, J.; Vincent, H. Trajectory Generation for Sensor-Driven and Time-Varying Tasks. Int. J. Robot. Res. 1993, 12, 380–393. [Google Scholar] [CrossRef]
- Lewin, C. Mathematics of Motion Control Profiles; Performance Motion Devices, Inc.: Westford, MA, USA, 2007; pp. 1–5. [Google Scholar]
- Heo, H.J.; Son, Y.; Kim, J.M. A Trapezoidal Velocity Profile Generator for Position Control Using a Feedback Strategy. Energies 2019, 12, 1222. [Google Scholar] [CrossRef]
- Macfarlane, S.; Croft, E. Jerk-bounded manipulator trajectory planning: Design for real-time applications. IEEE Trans. Robot. Autom. 2003, 19, 42–52. [Google Scholar] [CrossRef]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics: Modelling, Planning and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Bai, Y.; Chen, X.; Sun, H.; Yang, Z. Time-Optimal Freeform S-curve Profile under Positioning Error and Robustness Constraints. IEEE/ASME Trans. Mechatron. 2018, 4435, 1–11. [Google Scholar] [CrossRef]
- Jeon, J. A Generalized Approach for the Acceleration and Deceleration of Industrial Robots and CNC Machine Tools. IEEE Trans. Ind. Electron. 2000, 47, 133–139. [Google Scholar] [CrossRef]
- Martínez-Prado, M.A.; Rodríguez-Reséndiz, J.; Gómez-Loenzo, R.A.; Herrera-Ruiz, G.; Franco-Gasca, L.A. An FPGA-Based Open Architecture Industrial Robot Controller. IEEE Access 2018, 6, 13407–13417. [Google Scholar] [CrossRef]
- Ni, H.; Zhang, C.; Ji, S.; Hu, T.; Chen, Q.; Liu, Y.; Wang, G. A Bidirectional Adaptive Feedrate Scheduling Method of NURBS Interpolation Based on S-Shaped ACC/DEC Algorithm. IEEE Access 2018, 6, 63794–63812. [Google Scholar] [CrossRef]
- Ogata, K.; Yang, Y. Modern Control Engineering; Prentice Hall: Delhi, India, 2002; Volume 4. [Google Scholar]
- Nise, N.S. Control Systems Engineering, (With CD); John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Sabanovic, A.; Ohnishi, K. Motion Control Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Ding, H.; Wu, J. Point-to-point motion control for a high-acceleration positioning table via cascaded learning schemes. IEEE Trans. Ind. Electron. 2007, 54, 2735–2744. [Google Scholar] [CrossRef]
- Jeong, S.Y.; Choi, Y.J.; Park, P.; Choi, S.G. Jerk limited velocity profile generation for high speed industrial robot trajectories. IFAC Proc. Vol. 2005, 38, 595–600. [Google Scholar] [CrossRef]
- Wang, B.; Liu, Q.; Zhou, L.; Zhang, Y.; Li, X.; Zhang, J. Velocity profile algorithm realization on FPGA for stepper motor controller. In Proceedings of the 2011 2nd International Conference on Artificial Intelligence, Management Science and Electronic Commerce, Zhengzhou, China, 8–10 August 2011; pp. 6072–6075. [Google Scholar] [CrossRef]
- Kei, T.W.; Mang, V.; Un, C.S. Design of s-curve direct landing position control system for elevator using microcontroller. In Proceedings of the World Congress on Engineering and Computer Science, San Francisco, CA, USA, 24–26 October 2012; Volume II, pp. 24–27. [Google Scholar]
- Angeles, J.; López-Cajún, C.S. Optimization of Cam Mechanisms; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 9. [Google Scholar]
- Ha, C.W.; Lee, D. Analysis of Embedded Prefilters in Motion Profiles. IEEE Trans. Ind. Electron. 2018, 65, 1481–1489. [Google Scholar] [CrossRef]
- Li, H.; Le, M.; Gong, Z.; Lin, W. Motion profile design to reduce residual vibration of high-speed positioning stages. IEEE/ASME Trans. Mechatron. 2009, 14, 264–269. [Google Scholar]
- Gurocak, H. Industrial Motion Control: Motor Selection, Drives, Controller Tuning, Applications; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Padilla-Garcia, E.A.; Rodriguez-Angeles, A.; Reséndiz, J.R.; Cruz-Villar, C.A. Concurrent Optimization for Selection and Control of AC Servomotors on the Powertrain of Industrial Robots. IEEE Access 2018, 6, 27923–27938. [Google Scholar] [CrossRef]
- Xueshan, Y.; Xiaozhai, Q.; Lee, G.C.; Tong, M.; Jinming, C. Jerk and jerk sensor. In Proceedings of the 14th World Conference on Earthquake Engineering, Beijing, China, 12–17 October 2008. [Google Scholar]
- Bearee, R.; Barre, P.J.; Hautier, J.P. Vibration reduction abilities of some jerkcontrolled movement laws for industrial machines. In Proceedings of the 16th IFAC World Congress, Prague, Czech Republic, 3–8 July 2005. [Google Scholar]
- Analog Servo Drive; Rev. 2.0.1; Advanced Motion Controls: Camarillo, CA, USA, 2011.
- Fang, Y.; Hu, J.; Liu, W.; Shao, Q.; Qi, J.; Peng, Y. Smooth and time-optimal S-curve trajectory planning for automated robots and machines. Mech. Mach. Theory 2019, 137, 127–153. [Google Scholar] [CrossRef]
- Yoon, H.; Chung, S.; Kang, H.; Hwang, M. Trapezoidal Motion Profile to Suppress Residual Vibration of Flexible Object Moved by Robot. Electronics 2019, 8, 30. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | |
|---|---|---|
| Desired position | ||
| Time of displacement | T | s |
| Time factor for acceleration time | ||
| Time factor for jerk phase | ||
| Acceleration time | s | |
| Deceleration time | s | |
| Velocity | rad/s | |
| Acceleration | rad/s | |
| Jerk | rad/s |
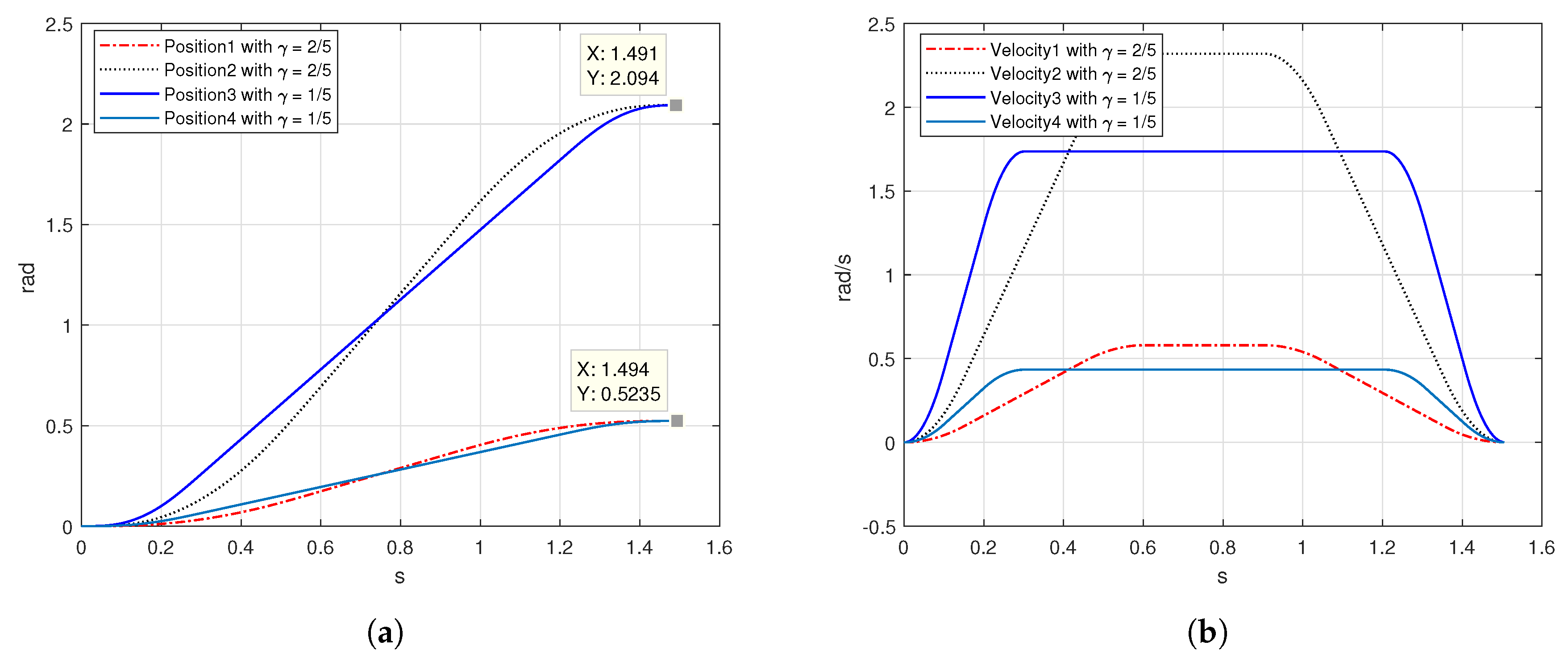
| Yi Fang and Wenhai Liu [33] | |||||||
| Position (rad) | Initial point Final point | 0 | 0 | 0 | 0 | 0 | 0 |
| Kinematics constraints | Velocity (rad/s) | 2.319 | 0.5799 | 1.736 | 0.434 | 8 | 5 |
| Acceleration (rad/s) | 5.137 | 1.2834 | 8.633 | 2.158 | 10 | 8 | |
| Jerk (rad/s) | 22.3 | 8.533 | 29.36 | 21.53 | 30 | 20 | |
| Parameters | Values | |
|---|---|---|
| First Displacement | ||
| Desired position | rad | |
| Time of displacement | s | |
| Velocity | rad/s | |
| Acceleration | rad/s | |
| Jerk | rad/s | |
| Second Displacement | ||
| Desired position | rad | |
| Time of displacement | s | |
| Velocity | rad/s | |
| Acceleration | rad/s | |
| Jerk | rad/s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
García-Martínez, J.R.; Rodríguez-Reséndiz, J.; Cruz-Miguel, E.E. A New Seven-Segment Profile Algorithm for an Open Source Architecture in a Hybrid Electronic Platform. Electronics 2019, 8, 652. https://doi.org/10.3390/electronics8060652
García-Martínez JR, Rodríguez-Reséndiz J, Cruz-Miguel EE. A New Seven-Segment Profile Algorithm for an Open Source Architecture in a Hybrid Electronic Platform. Electronics. 2019; 8(6):652. https://doi.org/10.3390/electronics8060652
Chicago/Turabian StyleGarcía-Martínez, José R., Juvenal Rodríguez-Reséndiz, and Edson E. Cruz-Miguel. 2019. "A New Seven-Segment Profile Algorithm for an Open Source Architecture in a Hybrid Electronic Platform" Electronics 8, no. 6: 652. https://doi.org/10.3390/electronics8060652
APA StyleGarcía-Martínez, J. R., Rodríguez-Reséndiz, J., & Cruz-Miguel, E. E. (2019). A New Seven-Segment Profile Algorithm for an Open Source Architecture in a Hybrid Electronic Platform. Electronics, 8(6), 652. https://doi.org/10.3390/electronics8060652