Pre- and Post-Processing Algorithms with Deep Learning Classifier for Wi-Fi Fingerprint-Based Indoor Positioning




Abstract
:1. Introduction
- A data pre-processing algorithm to compensate for impairments in the collected RSS fingerprint database;
- A data post-processing algorithm to enhance the system performance by limiting the effects of the indoor environment on the experimental phase of the proposed system; and
- Investigation of the performance of a deep learning-based classifier at the server in charge of the RSS fingerprint database storage and position prediction.
2. Proposed System
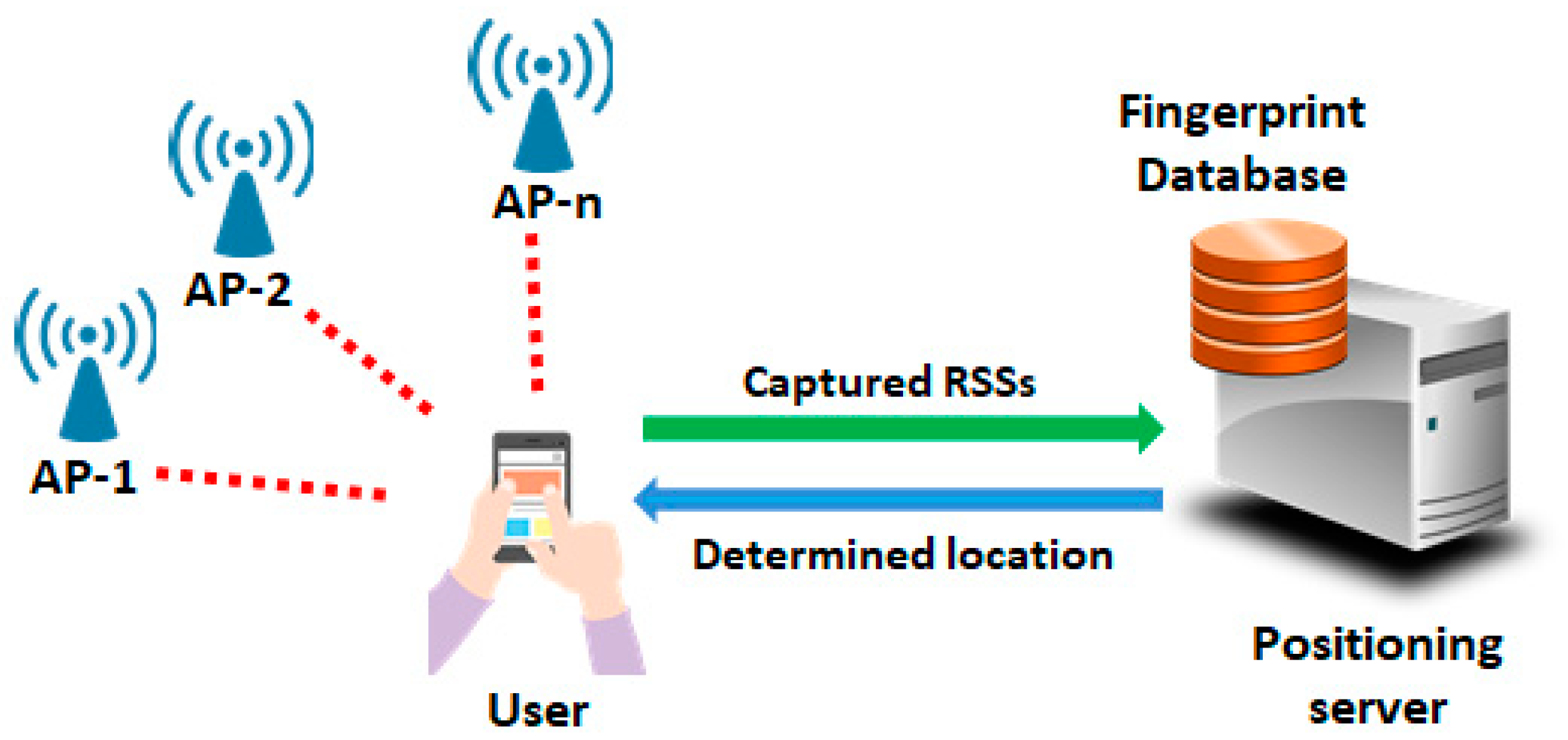
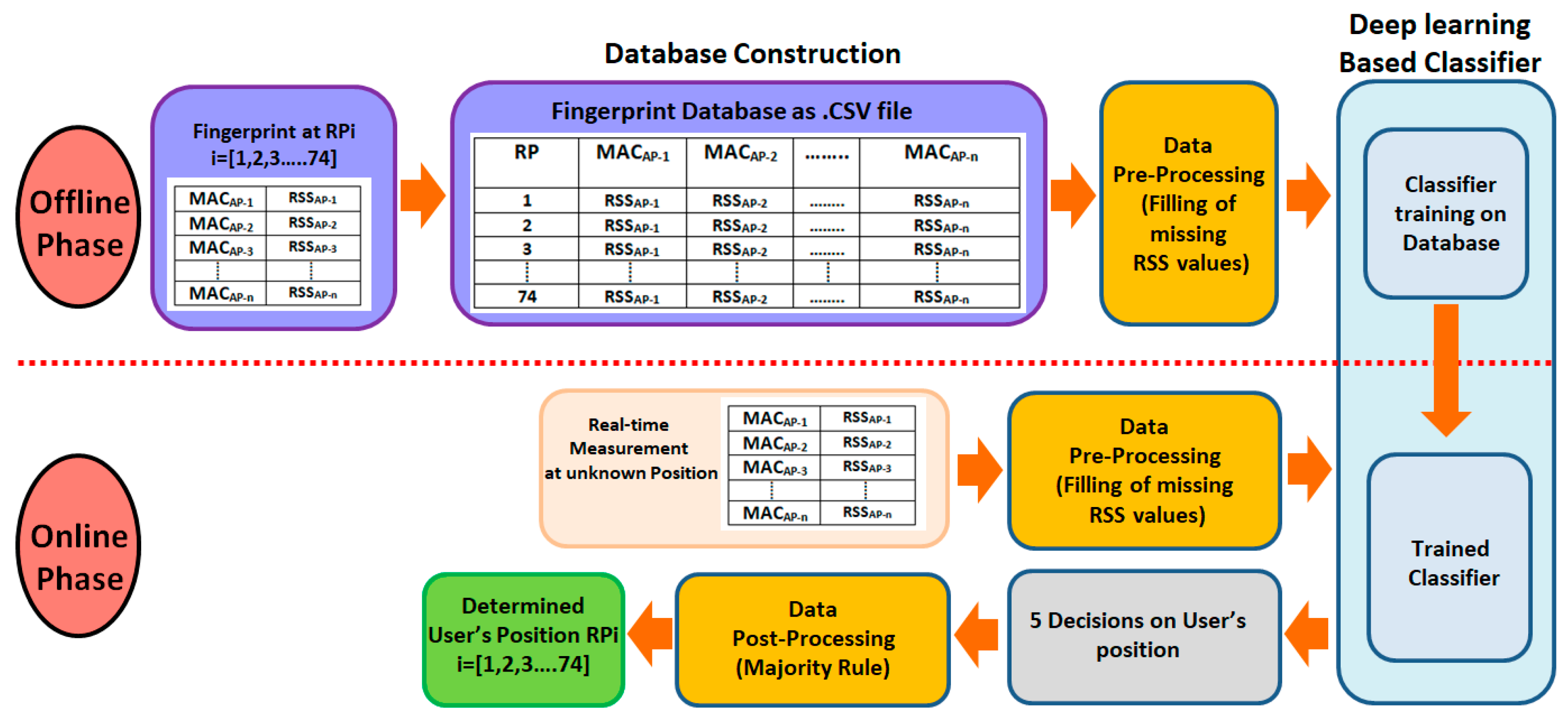
2.1. Overview of the Proposed System
2.2. Environment and Setup
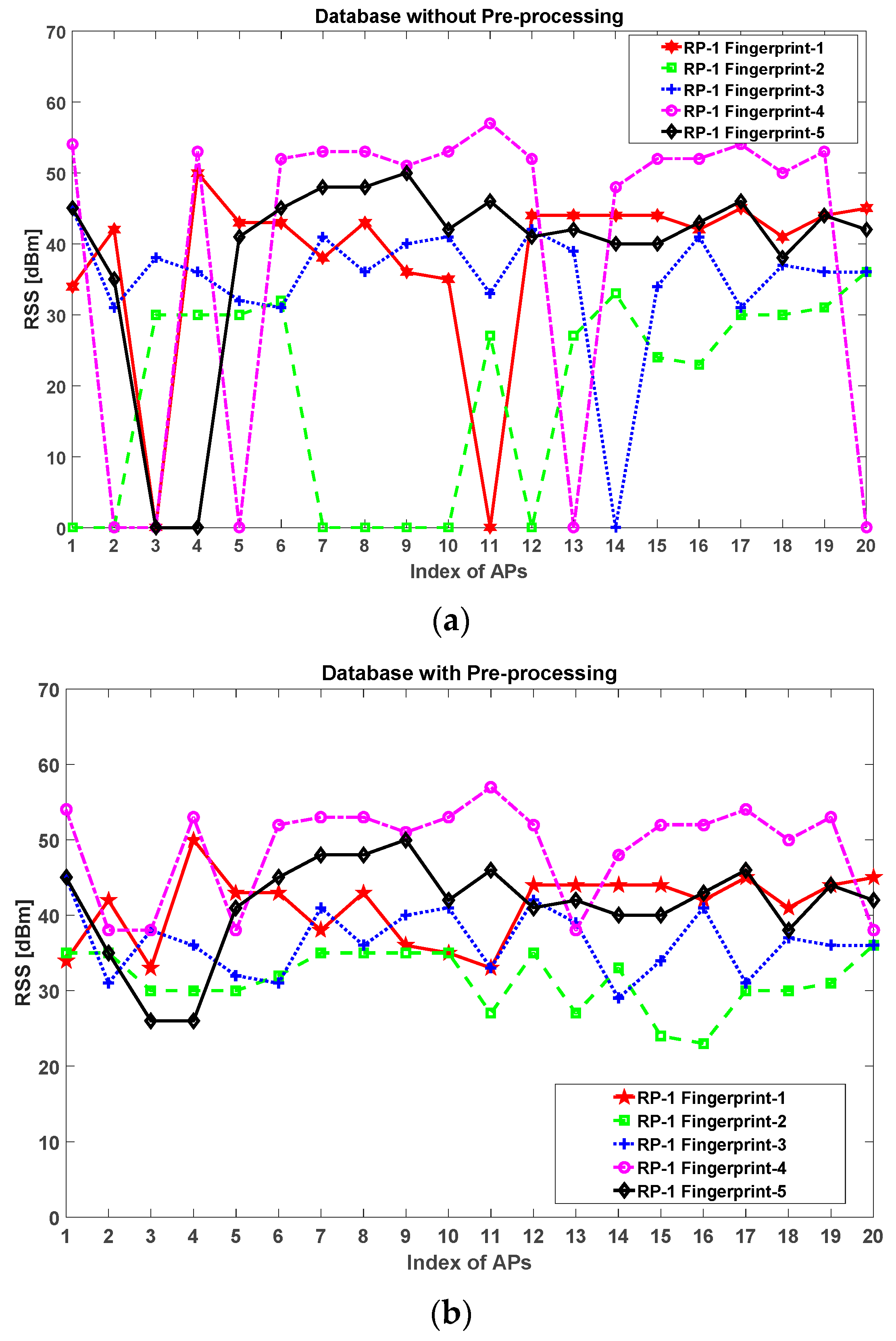
2.3. Pre-Processing Algorithm
- Step 1: Calculate the average of all non-zero values in each column (representing one AP) of the Training RSS fingerprint database (Training.csv);
- Step 2: Check the training data file for "0” values;
- Step 3: Replace zero with the average value from step1 at the corresponding row and column in the Training RSS fingerprint database; and
- Step 4: Repeat step 1 and step 3 for the trial fingerprint data (Trial.csv). (Note: the average of the training RSS fingerprint database is replaced for "0” values in Trial.csv).
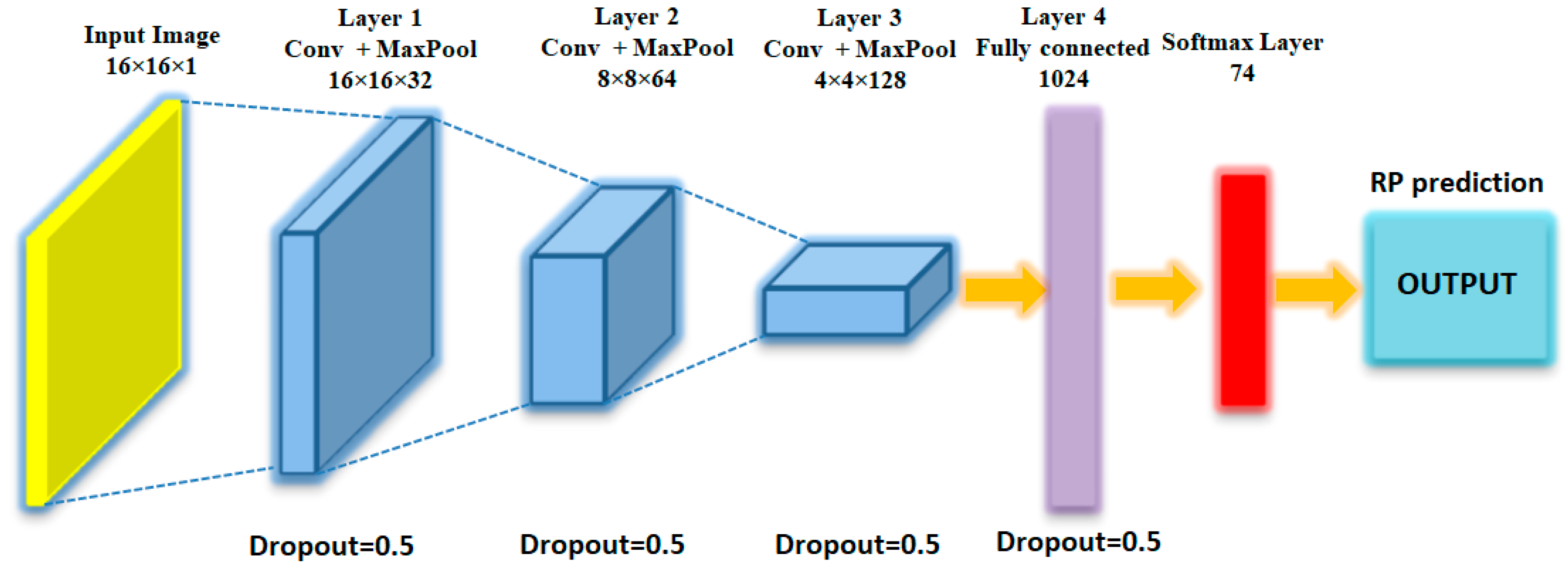
2.4. Deep Learning Classifier
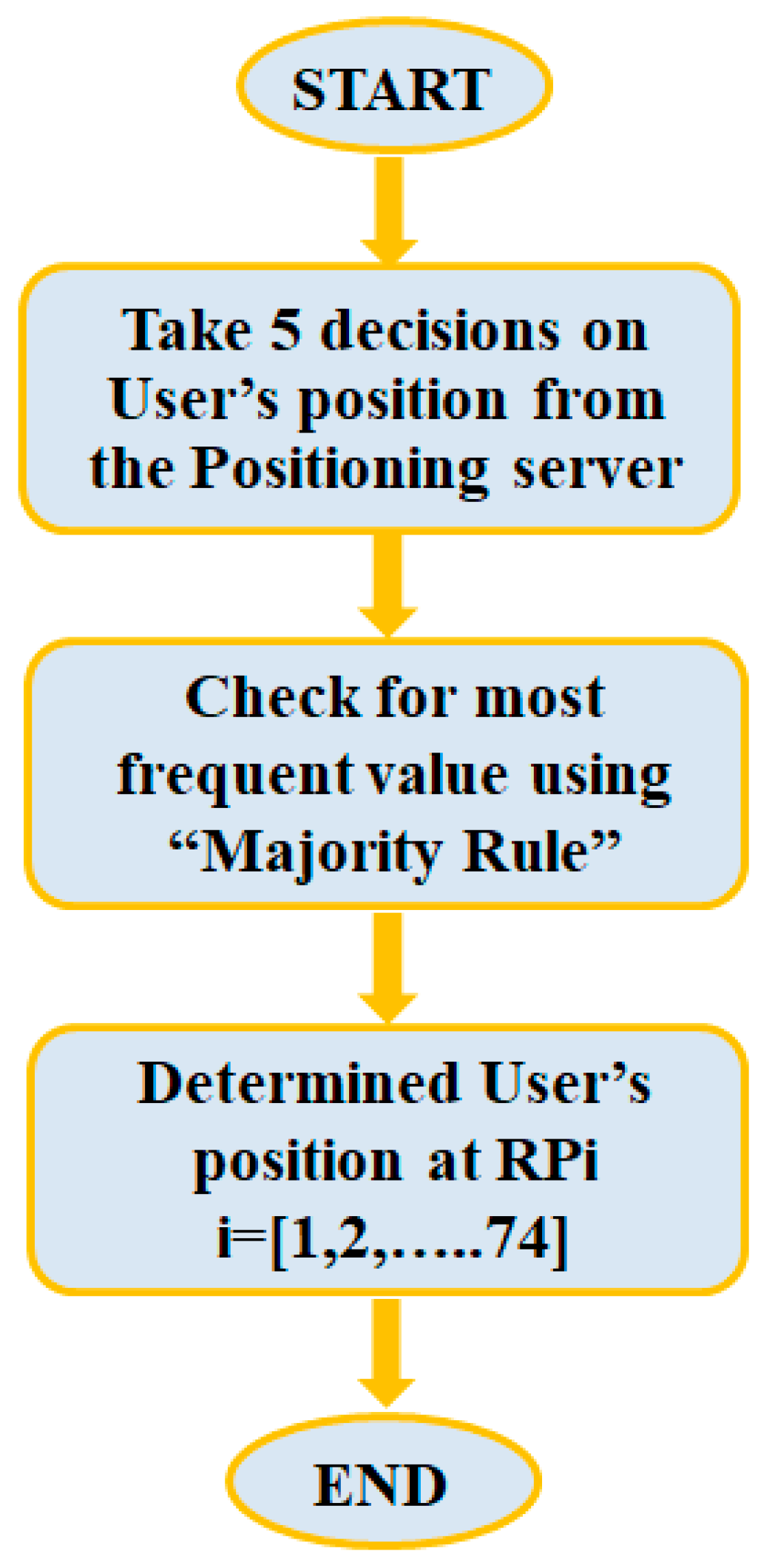
2.5. Post-Processing Algorithm
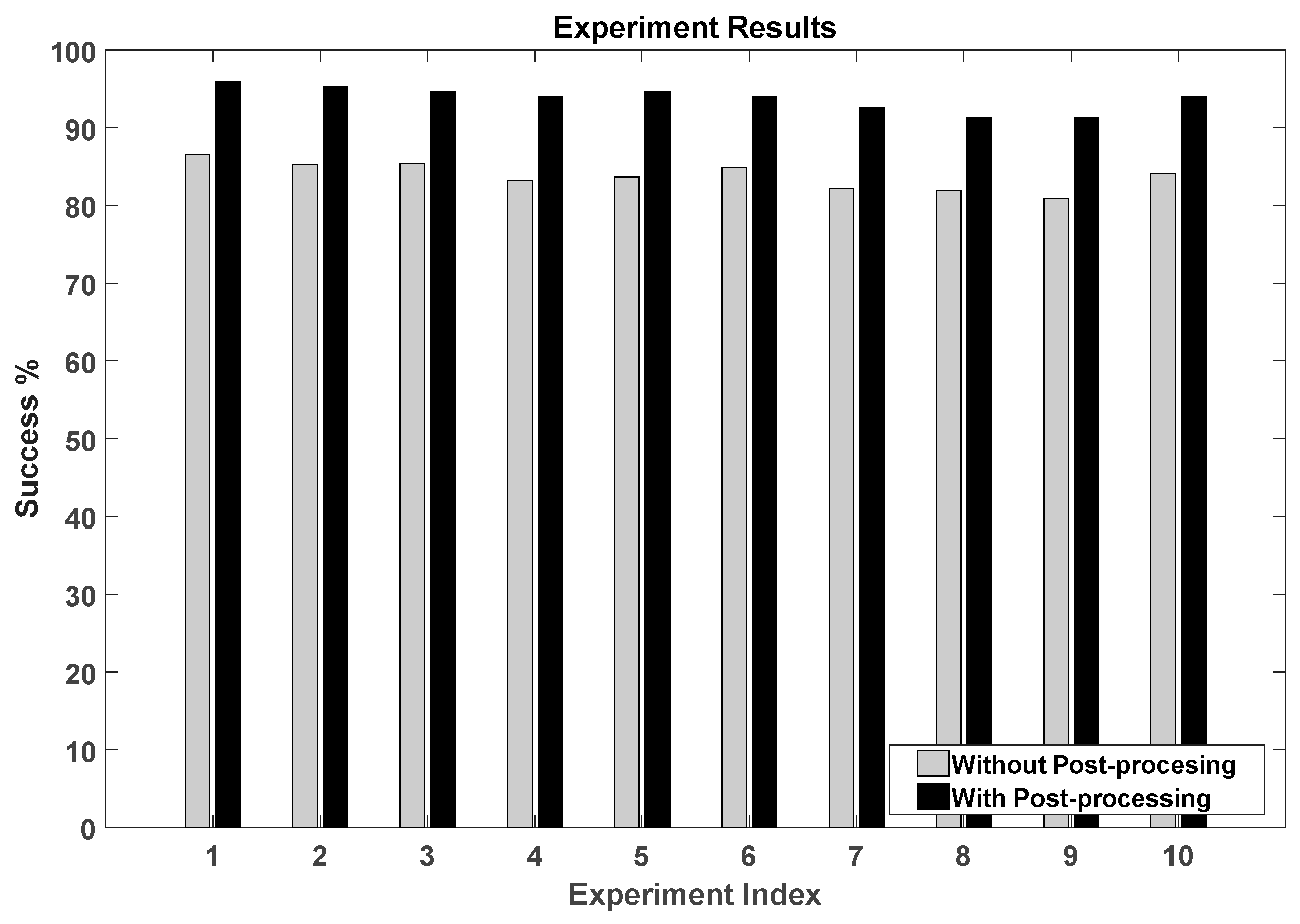
- Step 1: At every RP, five test RSS measurements are taken with the smartphone in forward as well as backward directions. The positioning server returns 5 predicted results for each RP.
- Step 2: The algorithm for post-processing computes the most frequent value among the five predictions by employing the “Majority rule”.
- Step 3: The most frequent value found during Step 2 is then declared as the final decision for the user location as RP number. The flow graph for the post processing algorithm is shown in Figure 6.
3. Numerical Results
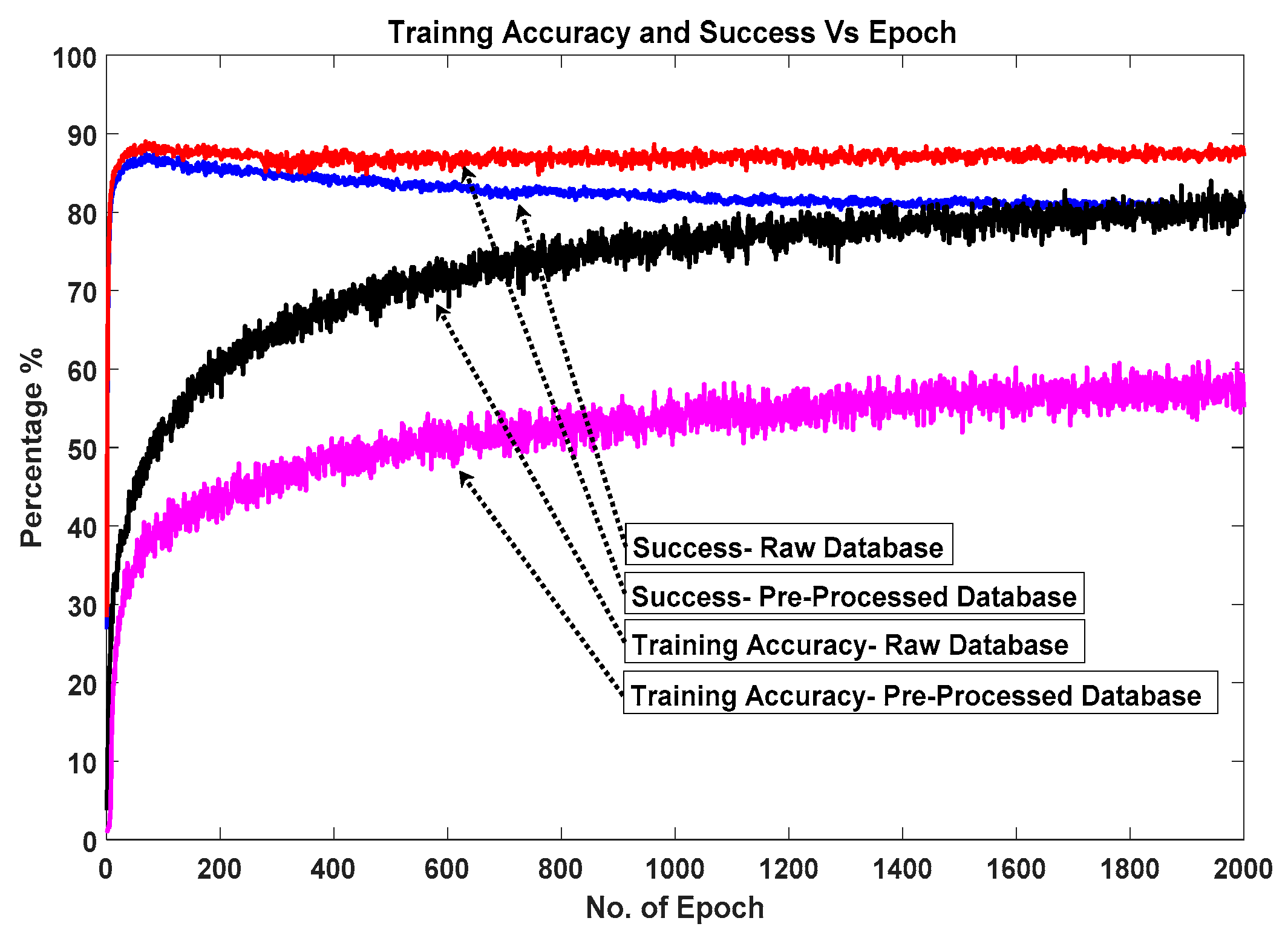
3.1. Simulation Results
3.2. Experiment Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Basri, C.; El Khadimi, A. Survey on indoor localization system and recent advances of WiFi fingerprinting technique. In Proceedings of the 5th International Conference on Multimedia Computing and Systems (ICMCS), Marrakech, Morocco, 29 September–1 October2016; pp. 253–259. [Google Scholar]
- Zhuang, Y.; Li, Y.; Qi, L.; Lan, H.; Yang, J.; El-Sheimy, N. A two-filter integration of MEMS sensors and Wi-Fi fingerprinting for indoor positioning. IEEE Sens. J. 2016, 13, 5125–5126. [Google Scholar] [CrossRef]
- Zou, H.; Chen, Z.; Jiang, H.; Xie, L.; Spanos, C. Accurate indoor localization and tracking using mobile phone inertial sensors, Wi-Fi and iBeacon. In Proceedings of the IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Kauai, HI, USA, 27–30 March 2017; pp. 1–4. [Google Scholar]
- Zhang, P.; Zhao, Q.; Li, Y.; Niu, X.; Zhuang, Y.; Liu, J. Collaborative WiFi fingerprinting using sensor-based navigation on smartphones. Sensors 2015, 7, 17534–17557. [Google Scholar] [CrossRef]
- He, S.; CHAN, S.-H.G. Wi-Fi fingerprint-based indoor positioning: Recent advances and comparisons. IEEE Commun. Surv. Tutorials 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Hantoush, R. Evaluating Wi-Fi indoor positioning approaches in a real world environment. Ph.D. Thesis, Universidade NOVA de Lisboa, Lisbon, Portugal, 2016. [Google Scholar]
- Xia, S.; Liu, Y.; Yuan, G.; Zhu, M.; Wang, Z. Indoor fingerprint positioning based on Wi-Fi: An overview. ISPRS Int. J. Geo-Inf. 2017, 6, 135. [Google Scholar] [CrossRef]
- Bozkurt, S.; Elibol, G.; Gunal, S.; Yayan, U. A comparative study on machine learning algorithms for indoor positioning. In Proceedings of the International Symposium on Innovations in Intelligent Systems and Applications (INISTA), Madrid, Spain, 2–4 September 2015; pp. 1–8. [Google Scholar]
- Mascharka, D.; Manley, E. Machine learning for indoor localization using mobile phone-based sensors. Available online: https://arxiv.org/abs/1505.06125 (accessed on 25 November 2018).
- Zou, H.; Lu, X.; Jiang, H.; Xie, L. A fast and precise indoor localization algorithm based on an online sequential extreme learning machine. Sensors 2015, 1, 1804–1824. [Google Scholar] [CrossRef] [PubMed]
- Adege, A.; Lin, H.P.; Tarekegn, G.; Jeng, S.S. Applying Deep Neural Network (DNN) for Robust Indoor Localization in Multi-Building Environment. Appl. Sci. 2018, 7, 1062. [Google Scholar] [CrossRef]
- Kodippili, N.S.; Dileeka, D. Integration of fingerprinting and trilateration techniques for improved indoor localization. In Proceedings of the Seventh International Conference on Wireless and Optical Communication Networks (WOCN), Colombo, Sri lanka, 6–8 September 2010; pp. 1–6. [Google Scholar]
- Chan, S.; Sohn, G. Indoor localization using Wi-Fi based fingerprinting and trilateration techniques for LBS applications. In Proceedings of the 7th International Conference on 3D Geoinformation, Quebec, QC, Canada, 16–17 May 2012. [Google Scholar]
- Suining, H.; Tianyang, H.; Chan, S.-H.G. Contour-based trilateration for indoor fingerprinting localization. In Proceedings of the 13th ACM Conference on Embedded Networked Sensor Systems, Seoul, South Korea, 1–4 November 2015; pp. 225–238. [Google Scholar]
- Zayets, A.; Steinbach, E. Robust Wi-Fi-based indoor localization using multipath component analysis. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Laitinen, H.; Juurakko, S.; Lahti, T.; Korhonen, R.; Lahteenmaki, J. Experimental Evaluation of Location Methods Based on Signal-Strength Measurements. IEEE Trans. Veh. Technol. 2007, 56, 287–296. [Google Scholar]
- Chen, K.; Wang, C.; Yin, Z.; Jiang, H.; Tan, G. Slide: Towards fast and accurate mobile fingerprinting for Wi-Fi indoor positioning systems. IEEE Sens. J. 2018, 3, 1213–1223. [Google Scholar] [CrossRef]
- Shu, Y.; Huang, Y.; Zhang, J.; Coué, P.; Cheng, P.; Chen, J.; Shin, K.G. Gradient-based fingerprinting for indoor localization and tracking. IEEE Trans. Ind. Electron. 2016, 63, 2424–2433. [Google Scholar] [CrossRef]
- Fang, S.H.; Cheng, Y.C.; Chien, Y.R. Exploiting Sensed Radio Strength and Precipitation for Improved Distance Estimation. IEEE Sens. J. 2018, 18, 6863–6873. [Google Scholar] [CrossRef]
- Zhuang, Y.; Syed, Z.; Li, Y.; El-Sheimy, N. Evaluation of two WiFi positioning systems based on autonomous crowdsourcing of handheld devices for indoor navigation. IEEE Trans. Mob. Comput. 2016, 15, 1982–1995. [Google Scholar] [CrossRef]
- Chen, L.; Li, B.; Zhao, K.; Rizos, C.; Zheng, Z. An improved algorithm to generate a Wi-Fi fingerprint database for indoor positioning. Sensors 2013, 8, 11085–11096. [Google Scholar] [CrossRef] [PubMed]
- Pivato, P.; Palopoli, L.; Petri, D. Accuracy of RSS-Based Centroid Localization Algorithms in an Indoor Environment. IEEE Trans. Instrum. Meas. 2011, 60, 11085–11096. [Google Scholar] [CrossRef]
- Joaquin, T.S.; Antonio, R.J.; Adriano, M.; Tomás, L.; Lu, M.C.; Knauth, S.; Germán, M.M.S.; Fernando, S.; Antoni, P.N.; Maria, J.N.; et al. Off-Line Evaluation of Mobile-Centric Indoor Positioning Systems: The Experiences from the 2017 IPIN Competition. Sensors 2018, 18, 1–27. [Google Scholar]
- Liqun, L.; Jacky, S.; Chunshui, Z.; Thomas, M.; Lin, J.H.; Feng, Z. Experiencing and handling the diversity in data density and environmental locality in an indoor positioning service. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking (Mobicon), Maui, HI, USA, 7–11 September 2014; pp. 459–470. [Google Scholar]
- Ling, G.; Lei, G.; Nour, E.D.; Chengwu, L. Statistical Machine Learning vs Deep Learning in Information Fusion: Competition or Collaboration? In Proceedings of the IEEE Conference on Multimedia Information Processing and Retrieval (MIPR), Miami, FL, USA, 10–12 April 2018; pp. 251–256. [Google Scholar]
- Zheng, Y. Methodologies for Cross-Domain Data Fusion: An Overview. IEEE Trans. Big Data 2015, 1, 16–34. [Google Scholar] [CrossRef]
- Qingchen, Z.; Laurence, T.Y.; Zhikui, C. Deep Computation Model for Unsupervised Feature Learning on Big Data. IEEE Trans. Serv. Comput. 2016, 9, 161–171. [Google Scholar]
- Jedari, E.; Wu, Z.; Rashidzadeh, R.; Saif, M. Wi-Fi based indoor location positioning employing random forest classifier. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–5. [Google Scholar]
- Gomes, R.; Ahsan, M.; Denton, A. Random Forest Classifier in SDN Framework for User-Based Indoor Localization. In Proceedings of the IEEE International Conference on Electro/Information Technology (EIT), Rochester, MI, USA, 3–5 May 2018; pp. 537–542. [Google Scholar]
- Nuño-Maganda, M.; Herrera-Rivas, H.; Torres-Huitzil, C.; Marisol Marín-Castro, H.; Coronado-Pérez, Y. On-Device Learning of Indoor Location for Wi-Fi Fingerprint Approach. Sensors 2018, 7, 2202. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. DeepFi: Deep learning for indoor fingerprinting using channel state information. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015; pp. 1666–1671. [Google Scholar]
- Nowicki, M.; Wietrzykowski, J. Low-Effort Place Recognition with WiFi Fingerprints Using Deep Learnin; Springer: Cham, Switzerland, 2017; pp. 575–584. [Google Scholar]
- Torres-Sospedra, J.; Montoliu, R.; Martínez-Usó, A.; Avariento, J.P.; Arnau, T.J.; Benedito-Bordonau, M.; Huerta, J. UJIIndoorLoc: A new multi-building and multi-floor database for WLAN fingerprint-based indoor localization problems. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, South Korea, 27–30 October 2014; pp. 261–270. [Google Scholar]
- Kudo, T.; Miura, J. Utilizing Wi-Fi signals for improving SLAM and person localization. In Proceedings of the IEEE/SICE International Symposium on System Integration (SII), Taipei, Taiwan, 11–14 December 2017; pp. 487–493. [Google Scholar]
- Depatla, S.; Muralidharan, A.; Mostofi, Y. Occupancy estimation using only WiFi power measurements. IEEE J. Sel. Areas Commun. 2015, 33, 1381–1393. [Google Scholar] [CrossRef]
- Cai, X.; Li, X.; Yuan, R.; Hei, Y. Identification and mitigation of NLOS based on channel state information for indoor Wi-Fi localization. In Proceedings of the IEEE International Conference on Wireless Communications & Signal Processing (WCSP), Nanjing, China, 15–17 October 2015; pp. 1–5. [Google Scholar]
- Dey, S.; Chugg, K.M.; Beerel, P.A. Morse Code Datasets for Machine Learning. In Proceedings of the 9th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Banglore, India, 10–12 July 2018; pp. 1–7. [Google Scholar]
- Gharatkar, S.; Ingle, A.; Naik, T.; Save, A. Review pre-processing using data cleaning and stemming technique. In Proceedings of the IEEE International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, 17–18 March 2017; pp. 1–4. [Google Scholar]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Eisa, S.; Peixoto, J.; Meneses, F.; Moreira, A. Removing useless APs and fingerprints from WiFi indoor positioning radio maps. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–7. [Google Scholar]
- JoshvaDevadas, T.; Seelammal, C.; Sadasivam, S. On data cleaning with intelligent agents to improve the accuracy of wi-fi positioning system using gis. Asian J. Sci. Res. 2013, 6, 53–66. [Google Scholar] [CrossRef]
- Song, C.; Wang, J. WLAN Fingerprint Indoor Positioning Strategy Based on Implicit Crowdsourcing and Semi-Supervised Learning. ISPRS Int. J. Geo-Info. 2017, 6, 356. [Google Scholar] [CrossRef]
- Bogdándy, B. Wi-Fi RSSI pre-processing library for Android. In Proceedings of the 19th International Carpathian Control Conference (ICCC), Szilvasvarad, Hungary, 28–31 March 2018; pp. 649–654. [Google Scholar]
- Bruha, I.; Famili, A. Postprocessing in machine learning and data mining. ACM SIGKDD Explor. Newslett. 2000, 2, 110–114. [Google Scholar] [CrossRef]
- Tf.reshape.Tensorflow.org. Available online: https://www.tensorflow.org/api_docs/python/tf/reshape (accessed on 28 December 2018).
- Liu, H.; Darabi, H.; Nanerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Hwang, S.H. Pre- and Post-Processing Algorithms with Deep Learning Classifier for Wi-Fi Fingerprint-Based Indoor Positioning. Available online: https://zenodo.org/record/2556161#.XFa40JCP600 (accessed on 3 February 2019).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| No. of layers | 4 |
| Type of layers | 3-CL |
| 1-FC | |
| Input image size | 16 × 16 = 256 |
| No. of Neurons | Layer1: 8192 |
| Layer2: 4096 | |
| Layer3: 2048 | |
| Layer4: 1024 | |
| Batch size | 1000 |
| Learning rate | 0.001 |
| Training Epoch | 2000 |
| Training probability | 0.5 |
| Inner-width | 1024 |
| Dropout rate | 0.5 |
| Location tolerance | 2 |
| Regularization (β) | 0.01 |
| nb_classes (SoftMax size) | 74 |
| Simulation Type | Training Accuracy | Success Percentage |
|---|---|---|
| Without Pre-processing | 83.98 | 87.46 |
| With Pre-processing | 60.96 | 88.96 |
| Experiment Index | Time | Direction | Success % Without Post-Processing | Success % With Post-Processing | Gain % |
|---|---|---|---|---|---|
| 1 | Morning | Forward | 88.64 | 97.29 | |
| Backward | 84.59 | 94.59 | |||
| Average | 86.61 | 95.94 | 9.33 | ||
| 2 | Afternoon | Forward | 86.75 | 95.94 | |
| Backward | 83.78 | 94.54 | |||
| Average | 85.26 | 95.24 | 9.98 | ||
| 3 | Evening | Forward | 84.05 | 94.59 | |
| Backward | 86.75 | 94.59 | |||
| Average | 85.40 | 94.59 | 9.19 | ||
| 4 | Morning | Forward | 82.43 | 93.24 | |
| Backward | 84.05 | 94.59 | |||
| Average | 83.24 | 93.91 | 10.67 | ||
| 5 | Afternoon | Forward | 84.83 | 94.59 | |
| Backward | 82.47 | 94.59 | |||
| Average | 83.65 | 94.59 | 10.94 | ||
| 6 | Evening | Forward | 84.05 | 93.24 | |
| Backward | 85.68 | 94.59 | |||
| Average | 84.86 | 93.91 | 9.05 | ||
| 7 | Morning | Forward | 82.61 | 91.89 | |
| Backward | 81.74 | 93.24 | |||
| Average | 82.17 | 92.56 | 10.39 | ||
| 8 | Afternoon | Forward | 81.58 | 90.54 | |
| Backward | 82.33 | 91.89 | |||
| Average | 81.95 | 91.21 | 9.26 | ||
| 9 | Evening | Forward | 80.54 | 90.54 | |
| Backward | 81.31 | 91.89 | |||
| Average | 80.92 | 91.21 | 10.29 | ||
| 10 | Morning | Forward | 83.59 | 93.24 | |
| Backward | 84.55 | 94.59 | |||
| Average | 84.07 | 93.91 | 9.84 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haider, A.; Wei, Y.; Liu, S.; Hwang, S.-H. Pre- and Post-Processing Algorithms with Deep Learning Classifier for Wi-Fi Fingerprint-Based Indoor Positioning. Electronics 2019, 8, 195. https://doi.org/10.3390/electronics8020195
Haider A, Wei Y, Liu S, Hwang S-H. Pre- and Post-Processing Algorithms with Deep Learning Classifier for Wi-Fi Fingerprint-Based Indoor Positioning. Electronics. 2019; 8(2):195. https://doi.org/10.3390/electronics8020195
Chicago/Turabian StyleHaider, Amir, Yiqiao Wei, Shuzhi Liu, and Seung-Hoon Hwang. 2019. "Pre- and Post-Processing Algorithms with Deep Learning Classifier for Wi-Fi Fingerprint-Based Indoor Positioning" Electronics 8, no. 2: 195. https://doi.org/10.3390/electronics8020195
APA StyleHaider, A., Wei, Y., Liu, S., & Hwang, S.-H. (2019). Pre- and Post-Processing Algorithms with Deep Learning Classifier for Wi-Fi Fingerprint-Based Indoor Positioning. Electronics, 8(2), 195. https://doi.org/10.3390/electronics8020195