A Current Reconstruction at Parallel Three Phase Inverters Using Two Current Sensors


Abstract
:1. Introduction
2. Proposed Current Reconstruction and Offset Compensation Method
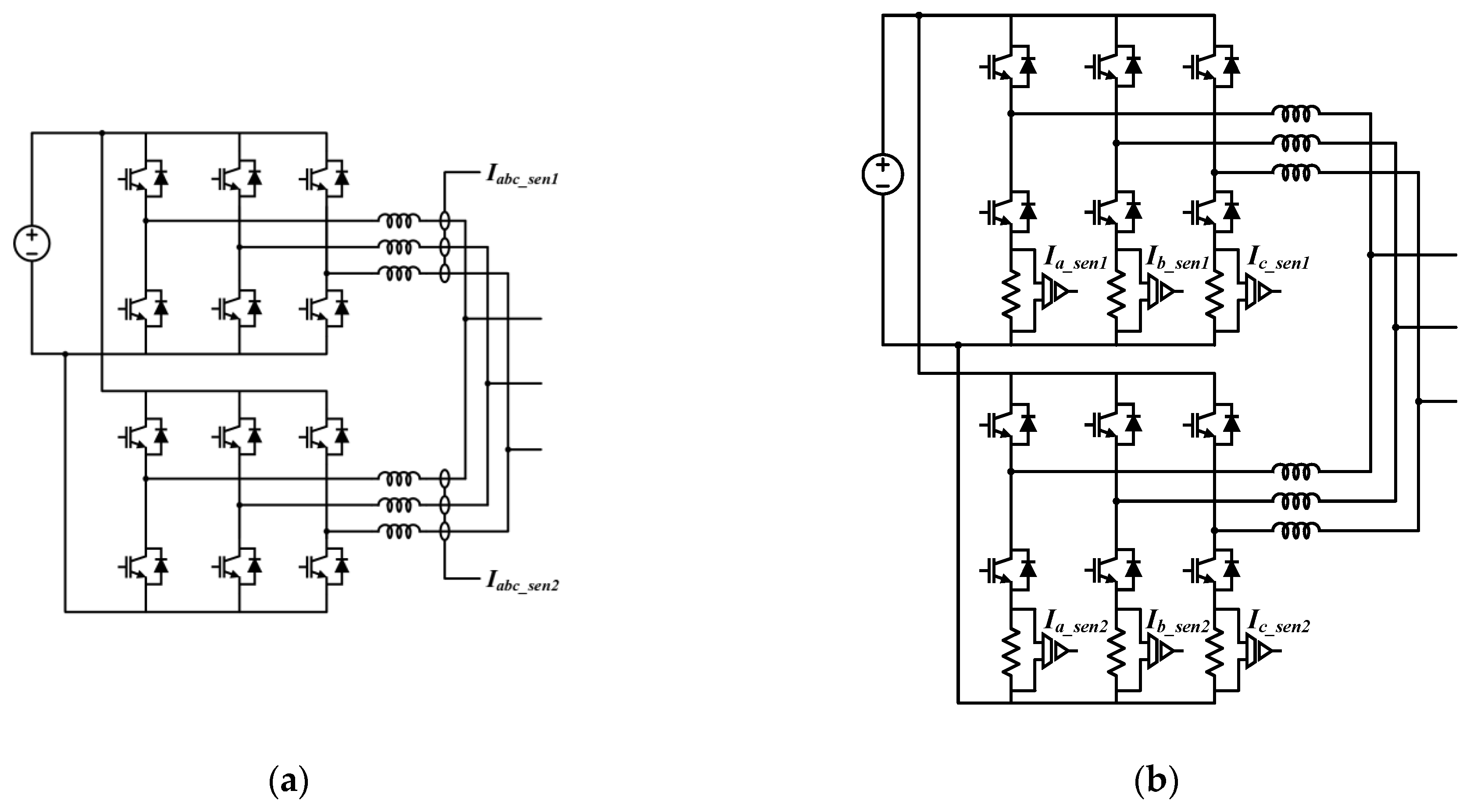
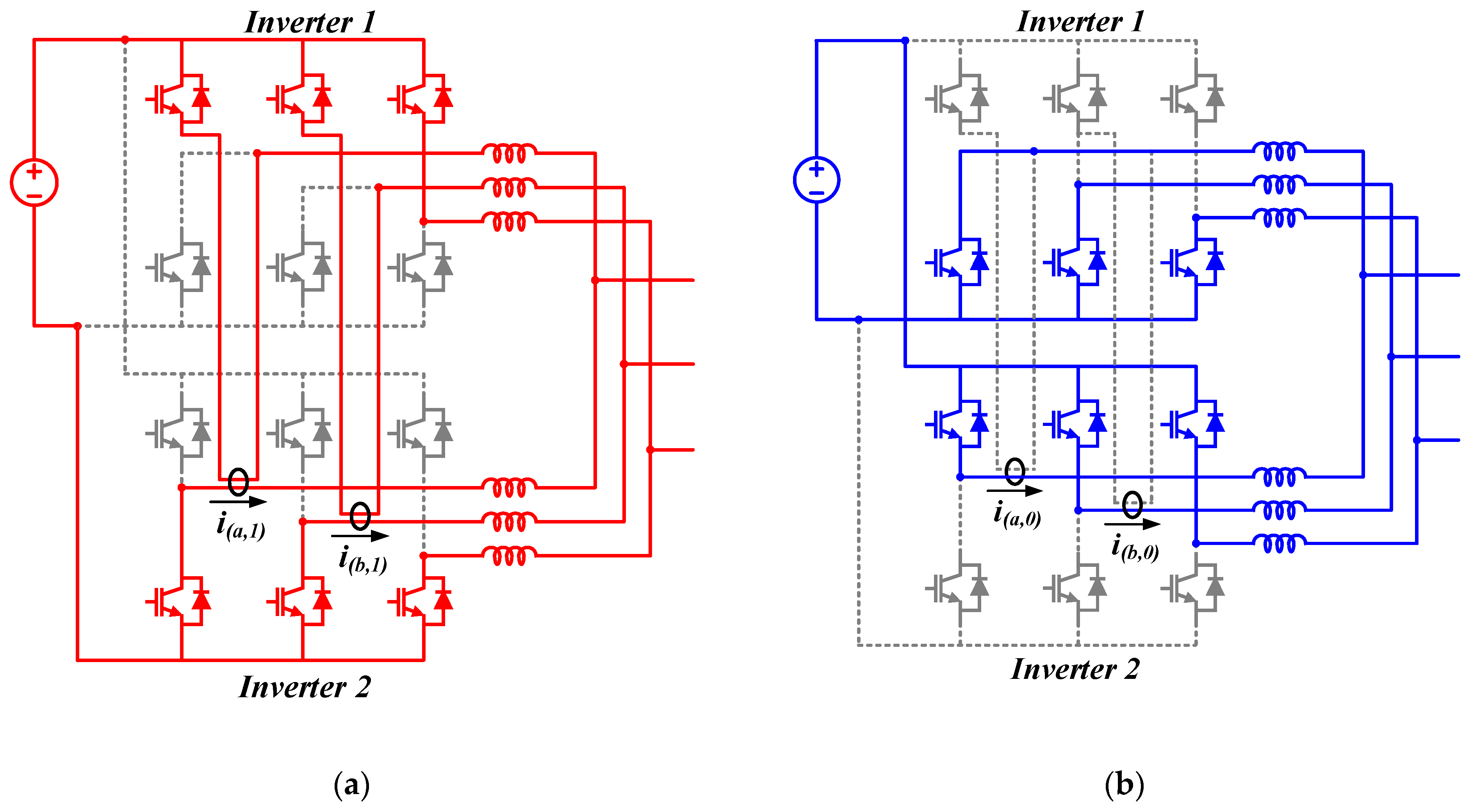
2.1. Current Detection and Reconstruction Method
2.2. DC Offset in Reconstructed Current Compensation
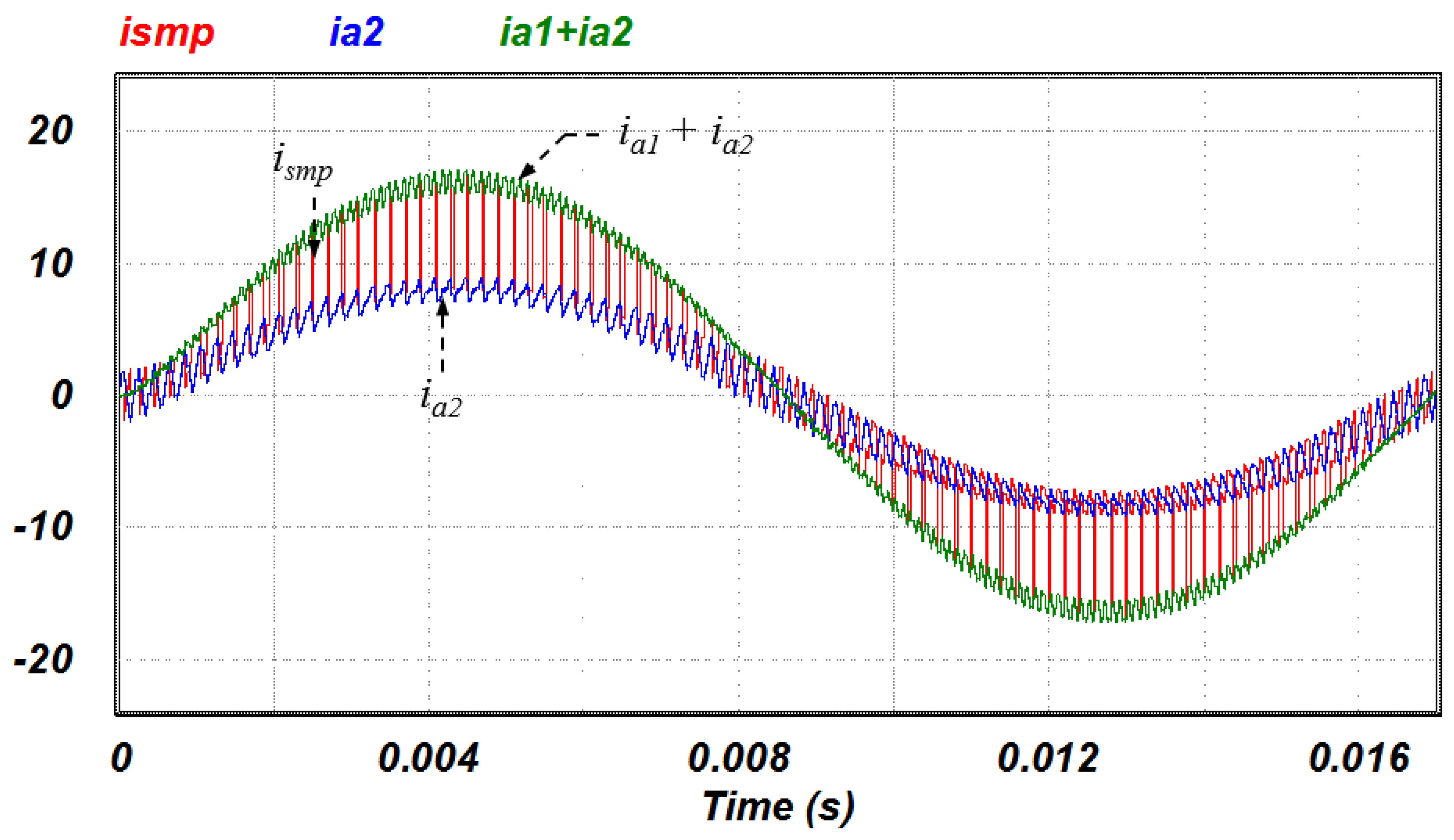
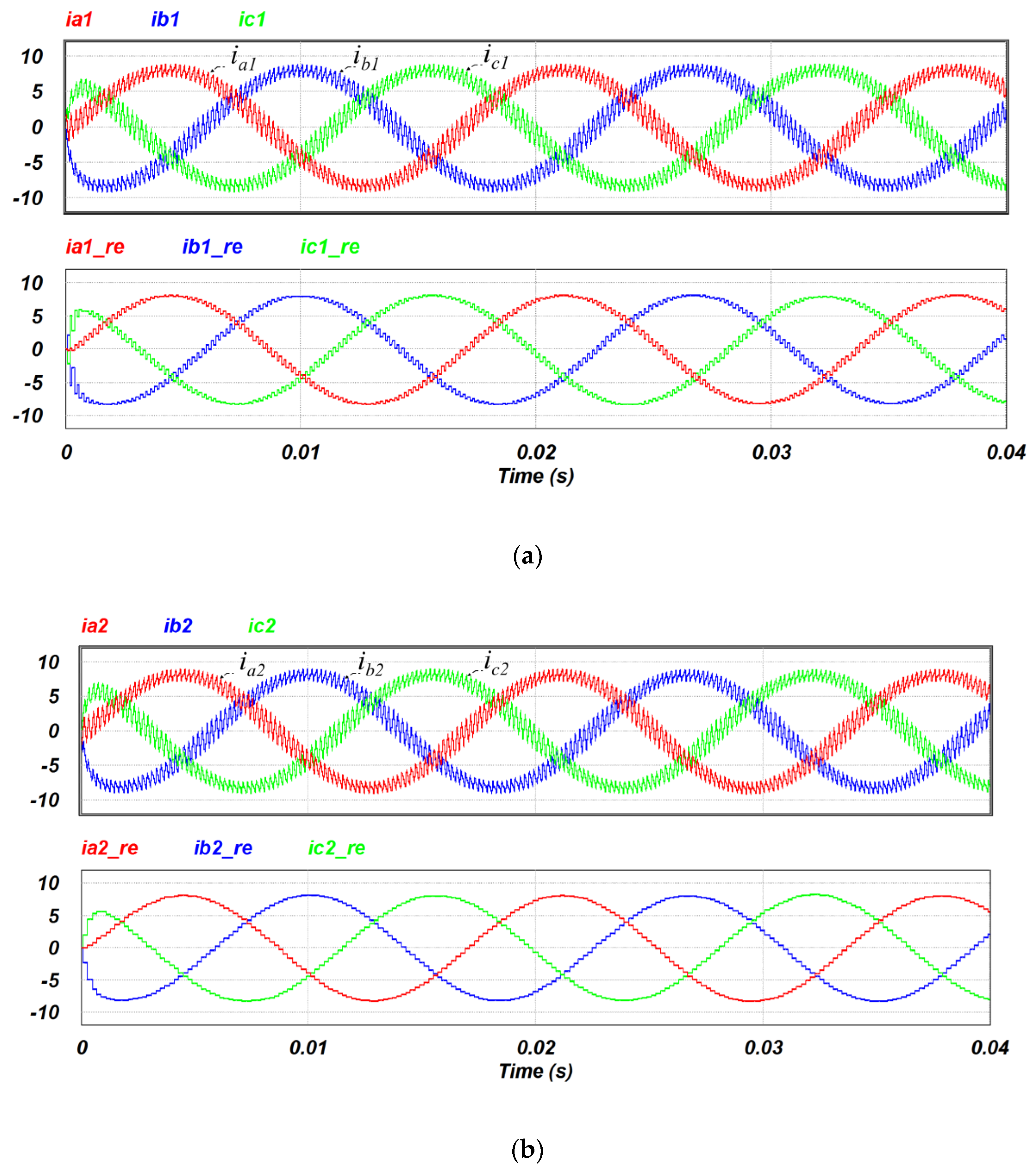
3. Simulation Results
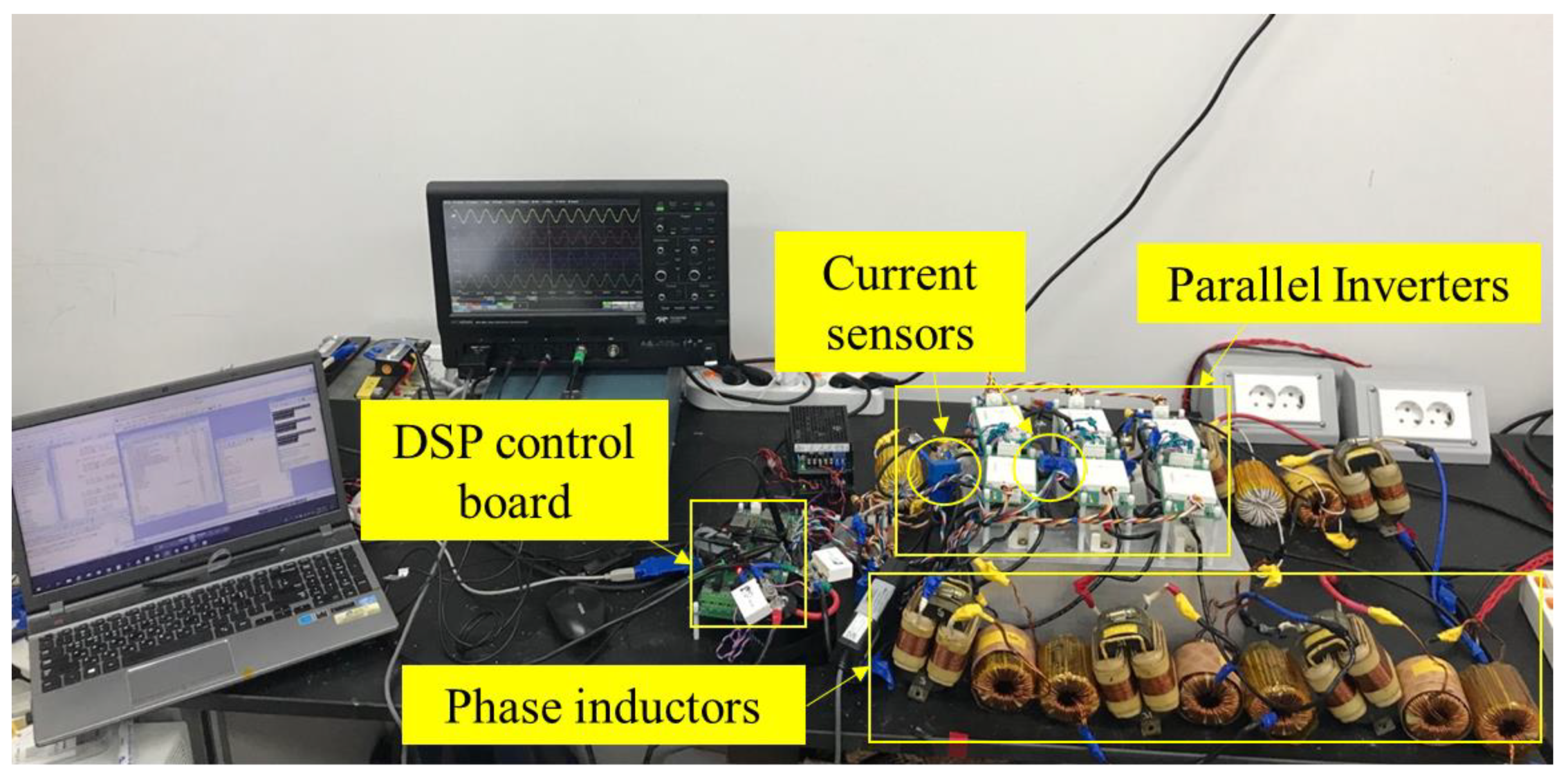
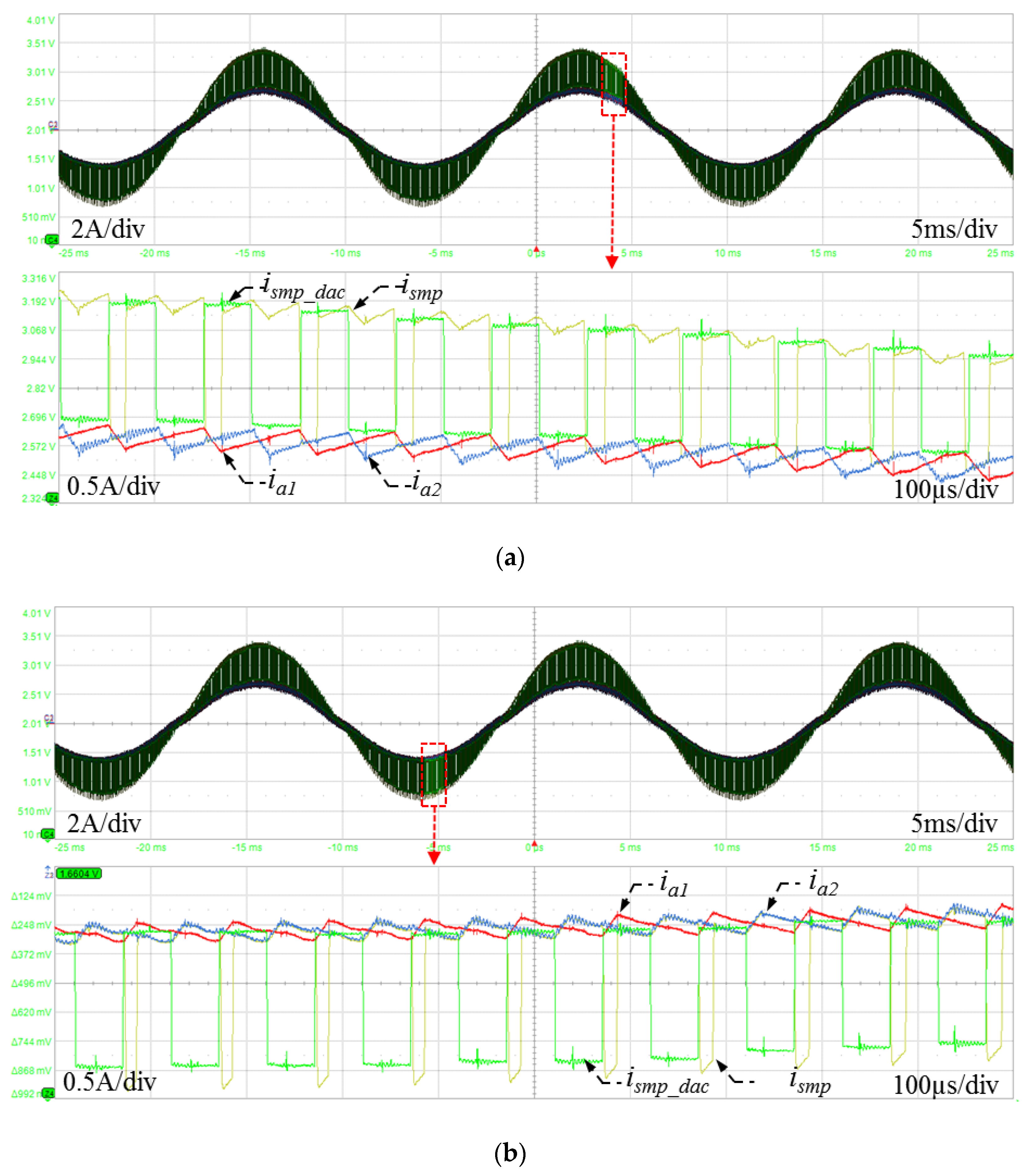
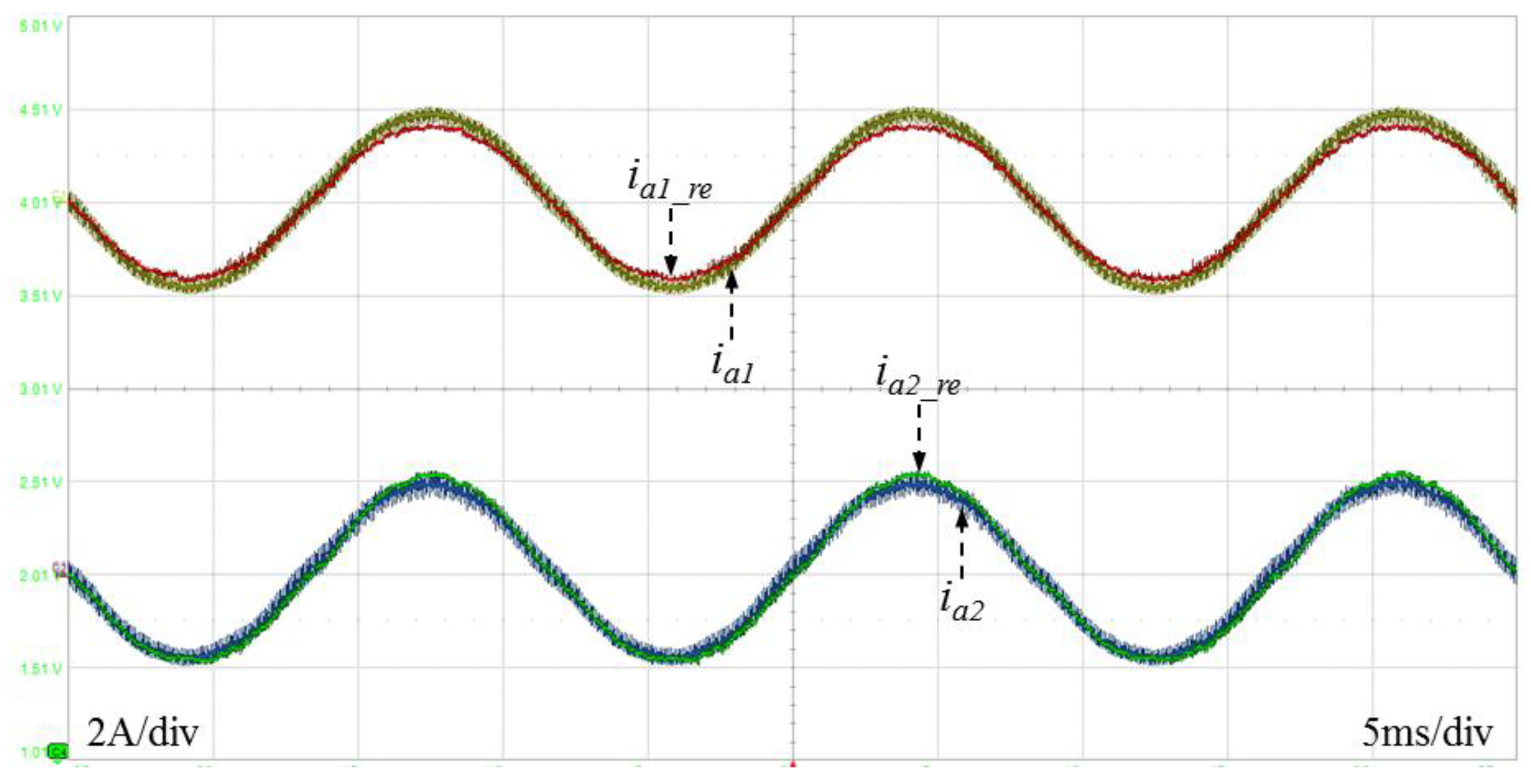
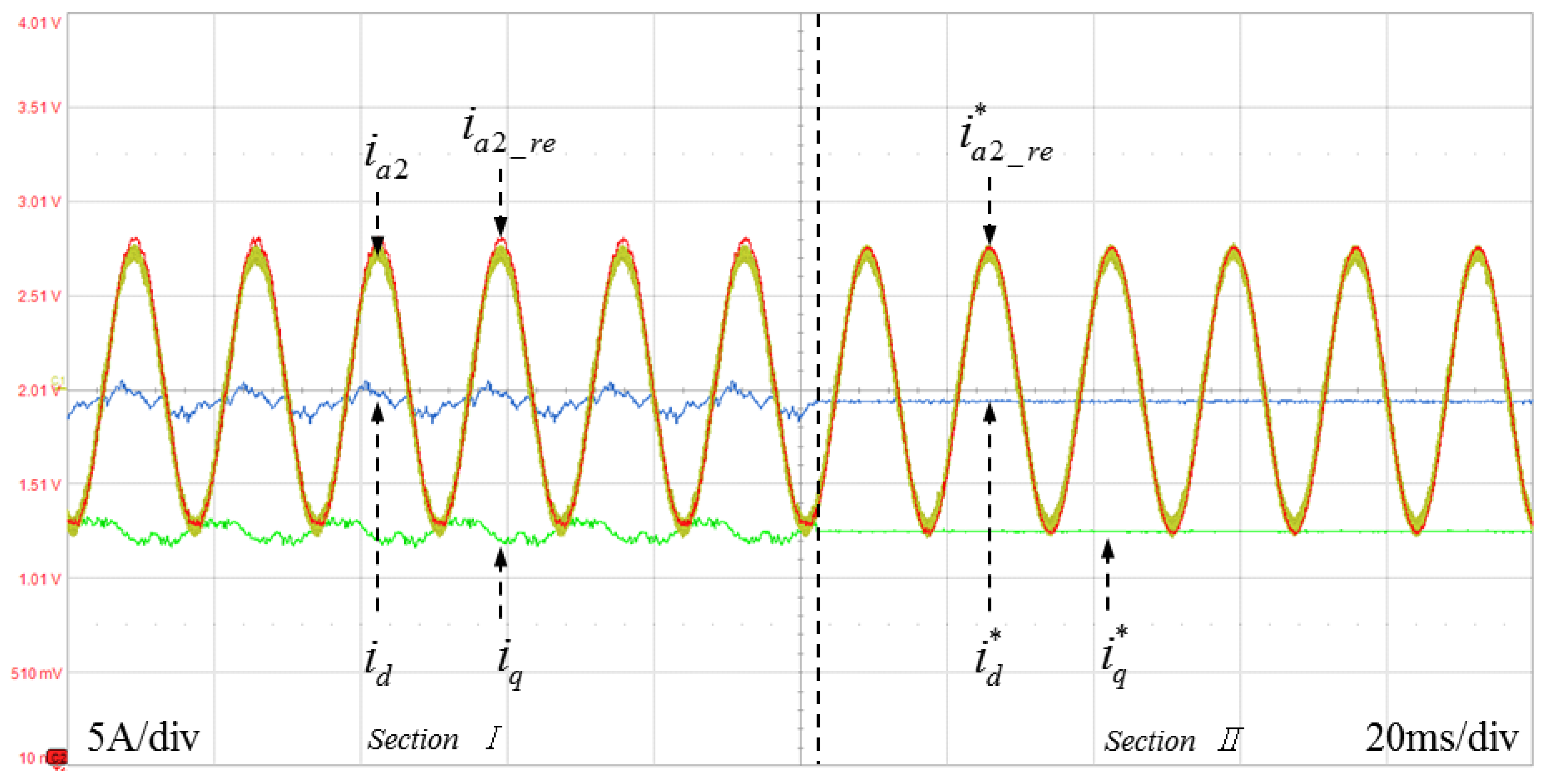
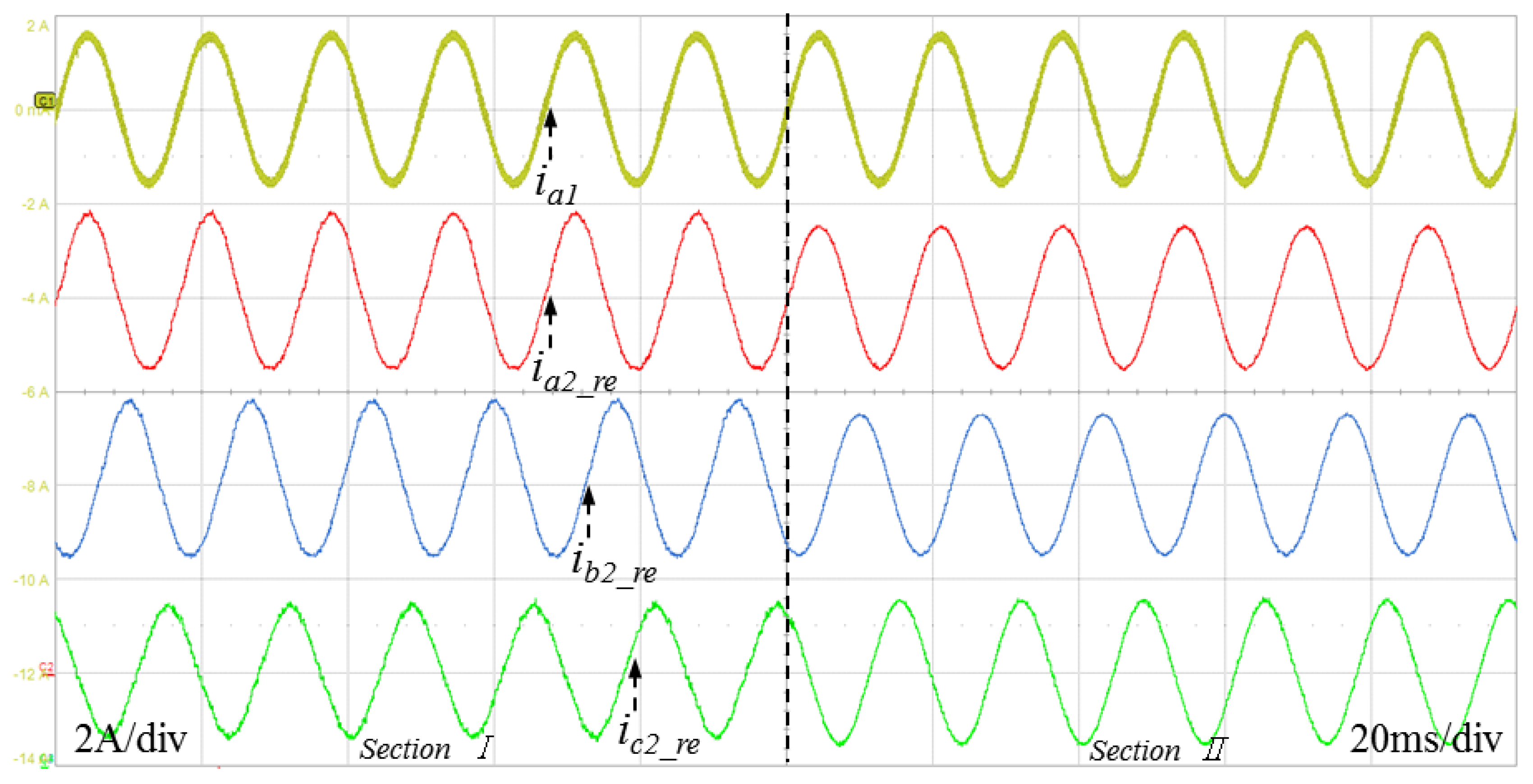
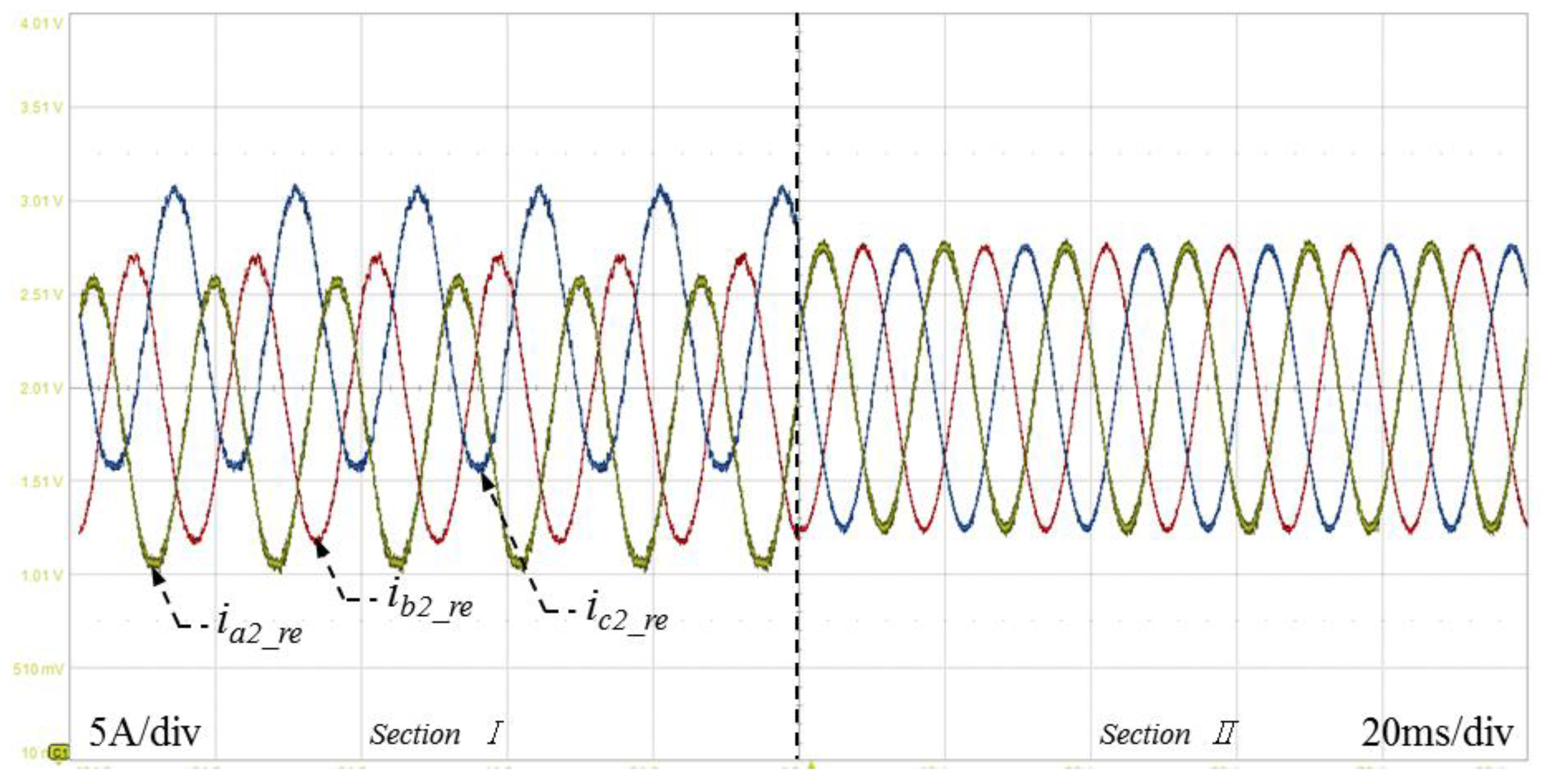
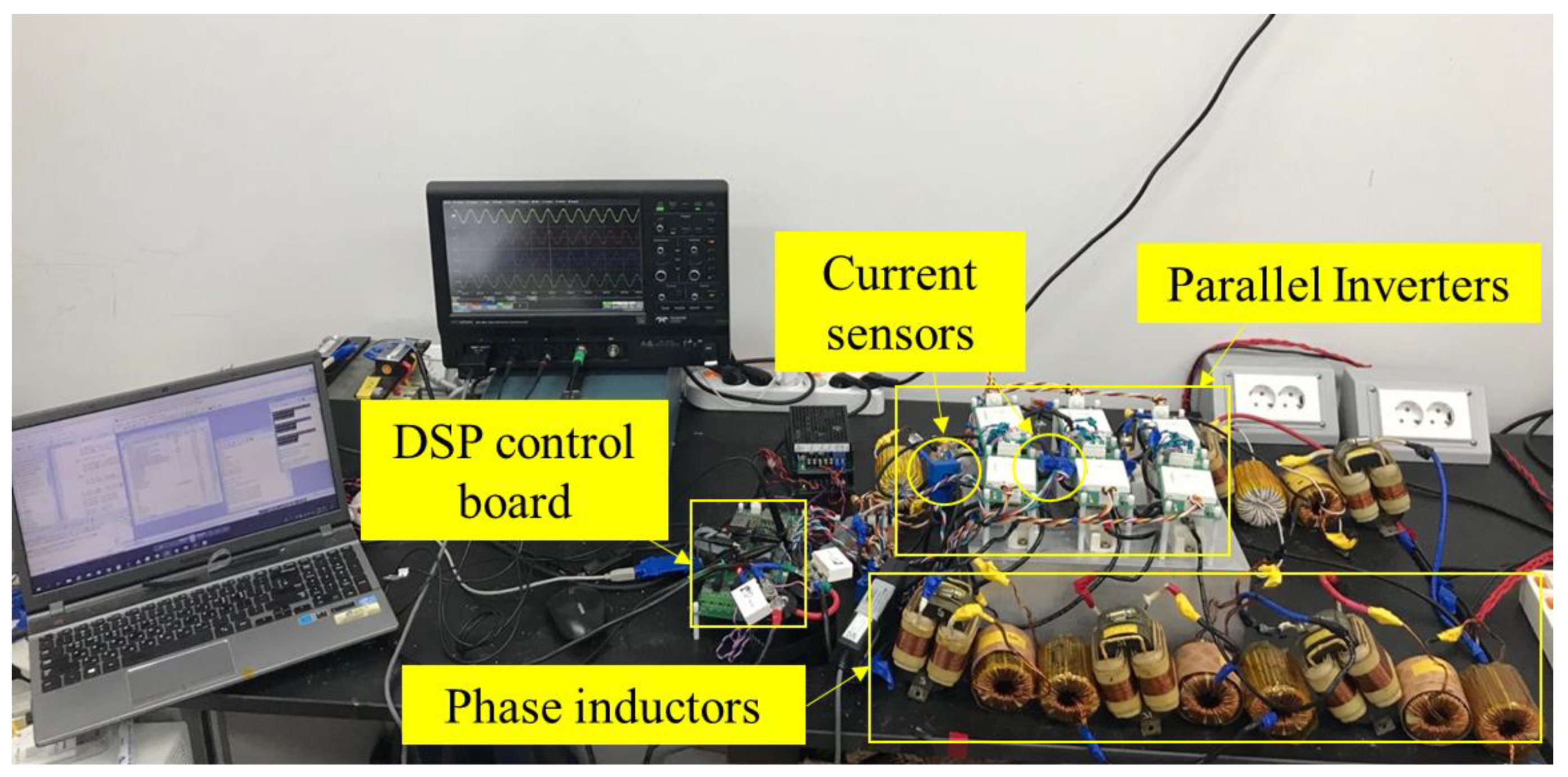
4. Experimental Results and AC Offset Compensation
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Qian, Q.; Xie, S.; Huang, L.; Xu, J.; Zhang, Z.; Zhang, B. Harmonic Suppression and Stability Enhancement for Parallel Multiple Grid-Connected Inverters Based on Passive Inverter Output Impedance. IEEE Trans. Ind. Electron. 2017, 64, 7587–7598. [Google Scholar] [CrossRef]
- Zou, X.; Du, X.; Wang, G. Modeling and stability analysis for multiple parallel grid-connected inverters system. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 2431–2436. [Google Scholar]
- Liu, Z.; Liu, J.; Hou, X.; Dou, Q.; Xue, D.; Liu, T. Output Impedance Modeling and Stability Prediction of Three-Phase Paralleled Inverters with Master–Slave Sharing Scheme Based on Terminal Characteristics of Individual Inverters. IEEE Trans. Power Electron. 2016, 31, 5306–5320. [Google Scholar] [CrossRef]
- Knight, A.M.; Ewanchuk, J.; Salmon, J.C. Coupled Three-Phase Inductors for Interleaved Inverter Switching. IEEE Trans. Magn. 2008, 44, 4119–4122. [Google Scholar] [CrossRef]
- Abusara, M.A.; Sharkh, S.M. Design and Control of a Grid-Connected Interleaved Inverter. IEEE Trans. Power Electron. 2013, 28, 748–764. [Google Scholar] [CrossRef]
- Hua, M.; Hu, H.; Xing, Y.; He, Z. Distributed Control for AC Motor Drive Inverters in Parallel Operation. IEEE Trans. Ind. Electron. 2011, 58, 5361–5370. [Google Scholar] [CrossRef]
- Green, T.C.; Williams, B.W. Derivation of motor line-current waveforms from the DC-link current of an inverter. IEE Proc. B Electr. Power Appl. 1989, 136, 196–204. [Google Scholar] [CrossRef]
- Ha, J. Current Prediction in Vector-Controlled PWM Inverters Using Single DC-Link Current Sensor. IEEE Trans. Ind. Electron. 2010, 57, 716–726. [Google Scholar]
- Lee, W.-C.; Lee, T.-K.; Hyun, D.-S. Comparison of single-sensor current control in the DC link for three-phase voltage-source PWM converters. IEEE Trans. Ind. Electron. 2001, 48, 491–505. [Google Scholar]
- Wolbank, T.M.; Macheiner, P.E. Current-controller with single DC link current measurement for inverter-fed AC machines based on an improved observer-structure. IEEE Trans. Power Electron. 2004, 19, 1562–1567. [Google Scholar] [CrossRef]
- Kim, H.; Jahns, T.M. Current Control for AC Motor Drives Using a Single DC-Link Current Sensor and Measurement Voltage Vectors. IEEE Trans. Ind. Appl. 2006, 42, 1539–1547. [Google Scholar] [CrossRef]
- Kim, H.; Jahns, T.M. Phase Current Reconstruction for AC Motor Drives using a DC-link Single Current Sensor and Measurement Voltage Vectors. In Proceedings of the 2005 IEEE 36th Power Electronics Specialists Conference, Recife, Brazil, 12–16 June 2005; pp. 1346–1352. [Google Scholar]
- Bertoluzzo, M.; Buja, G.; Menis, R. Direct torque control of an induction motor using a single current sensor. IEEE Trans. Ind. Electron. 2006, 53, 778–784. [Google Scholar] [CrossRef]
- Yan, H.; Xu, Y.; Zhao, W.; Zhang, H.; Gerada, C. DC Drift Error Mitigation Method for Three-Phase Current Reconstruction with Single Hall Current Sensor. IEEE Trans. Magn. 2019, 55, 1–4. [Google Scholar] [CrossRef]
- Shin, H.; Ha, J. Phase Current Reconstructions from DC-Link Currents in Three-Phase Three-Level PWM Inverters. IEEE Trans. Power Electron. 2014, 29, 582–593. [Google Scholar] [CrossRef]
- Li, X.; Dusmez, S.; Akin, B.; Rajashekara, K. A New SVPWM for the Phase Current Reconstruction of Three-Phase Three-level T-type Converters. IEEE Trans. Power Electron. 2016, 31, 2627–2637. [Google Scholar] [CrossRef]
- Marcetic, D.P.; Adzic, E.M. Improved three-phase current reconstruction for induction motor drives with dc-link shunt. IEEE Trans. Ind. Electron. 2010, 57, 2454–2464. [Google Scholar] [CrossRef]
- Cho, Y.; LaBella, T.; Lai, J. A Three-Phase Current Reconstruction Strategy with Online Current Offset Compensation Using a Single Current Sensor. IEEE Trans. Ind. Electron. 2012, 59, 2924–2933. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| DC link voltage (Vdc) | 425 V |
| Phase inductor (L) | 5.5 mH |
| Switching frequency (fs) | 5 kHz |
| Dead-time | 2.2 μsec |
| Load resistor (RL) | 10 Ω |
| Parameter | Value |
|---|---|
| DC-link voltage (Vdc) | 425 V |
| Phase inductor (L) | 5.5 mH |
| Switching frequency (fs) | 10 kHz |
| Dead-time | 2.2 μsec |
| Load resistor (RL) | 10 Ω |
| Load capacitor (CL) | 2 mF |
| Output voltage (Vout) | 110 V |
| Output frequency (f) | 60 Hz |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Han, Y.; Wang, S.; Wang, Y.; Cho, Y. A Current Reconstruction at Parallel Three Phase Inverters Using Two Current Sensors. Electronics 2019, 8, 179. https://doi.org/10.3390/electronics8020179
Kim J, Han Y, Wang S, Wang Y, Cho Y. A Current Reconstruction at Parallel Three Phase Inverters Using Two Current Sensors. Electronics. 2019; 8(2):179. https://doi.org/10.3390/electronics8020179
Chicago/Turabian StyleKim, Jeongwoo, Yu Han, Shanshan Wang, Yihe Wang, and Younghoon Cho. 2019. "A Current Reconstruction at Parallel Three Phase Inverters Using Two Current Sensors" Electronics 8, no. 2: 179. https://doi.org/10.3390/electronics8020179
APA StyleKim, J., Han, Y., Wang, S., Wang, Y., & Cho, Y. (2019). A Current Reconstruction at Parallel Three Phase Inverters Using Two Current Sensors. Electronics, 8(2), 179. https://doi.org/10.3390/electronics8020179