An Infinite-Norm Algorithm for Joystick Kinematic Control of Two-Wheeled Vehicles

 , , , , and
, , , , and
Abstract
1. Introduction
2. Background Theory
2.1. The Joystick Operation
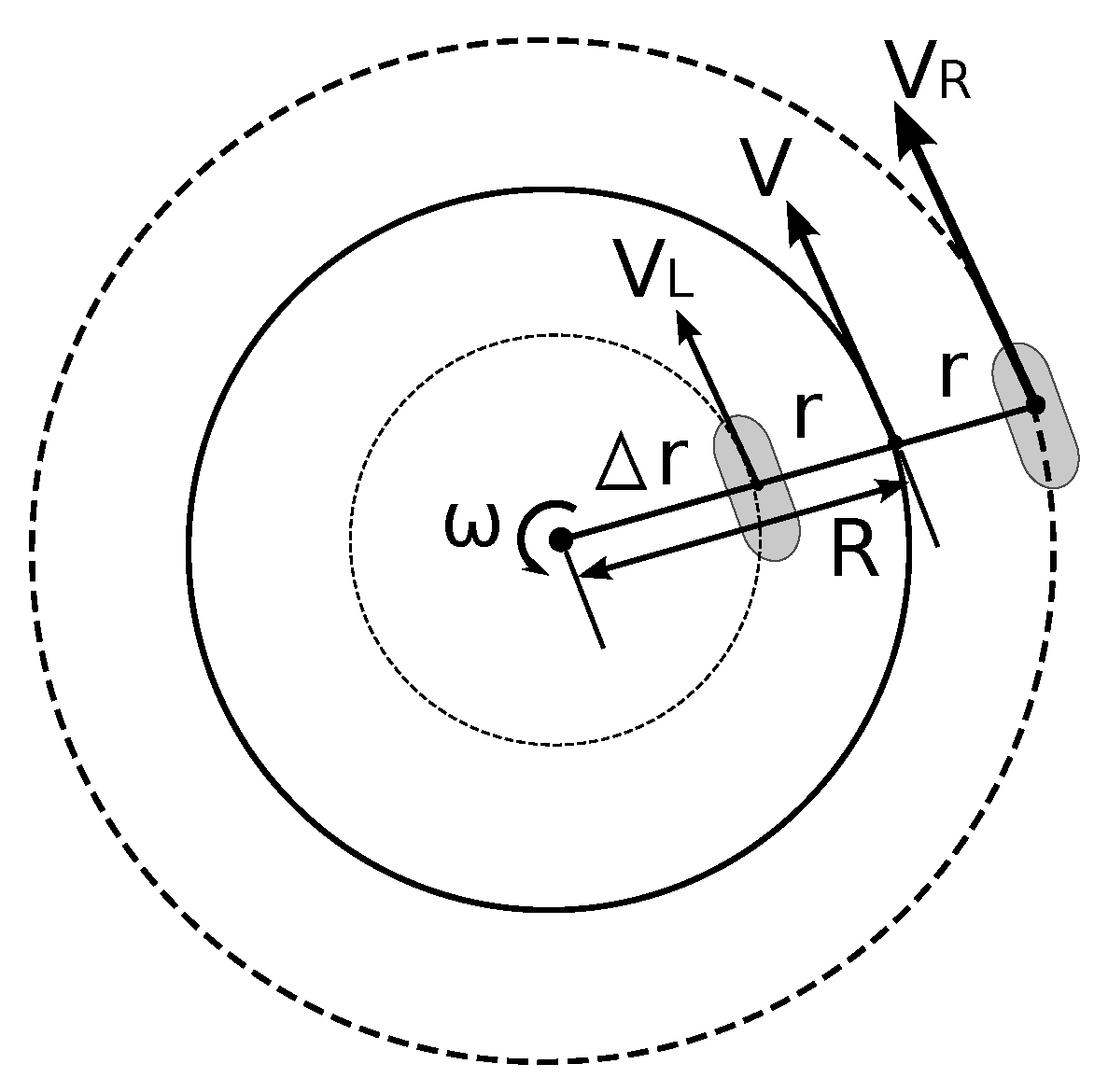
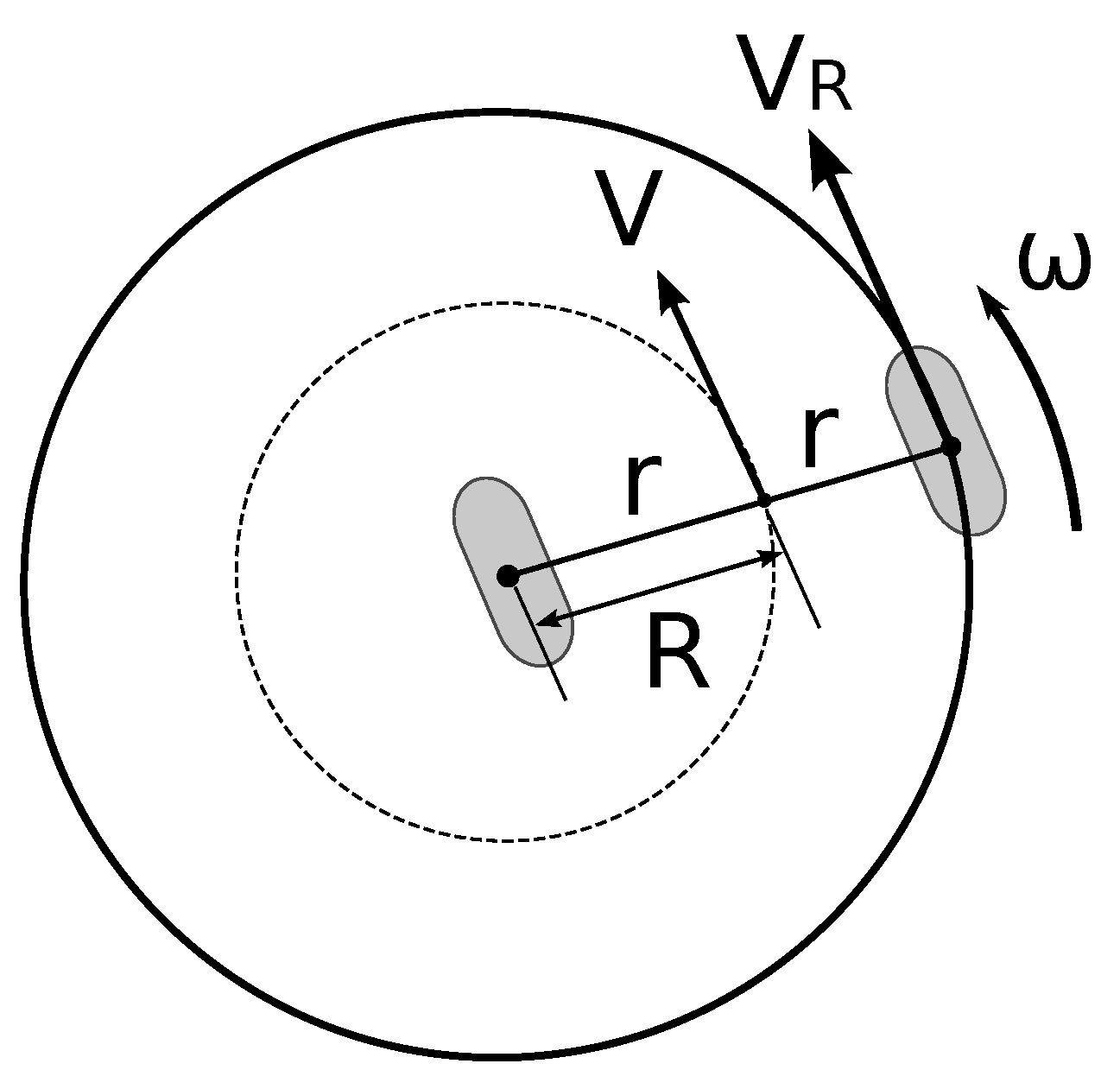
2.2. Fundamentals of Two-Wheeled Terrestrial Locomotion
2.3. Fundamentals of the Mathematical Norm
3. The Mathematical Model for Two-Wheeled Locomotion
3.1. An Infinity-Norm Approach Applied to Joystick Kinematic Control
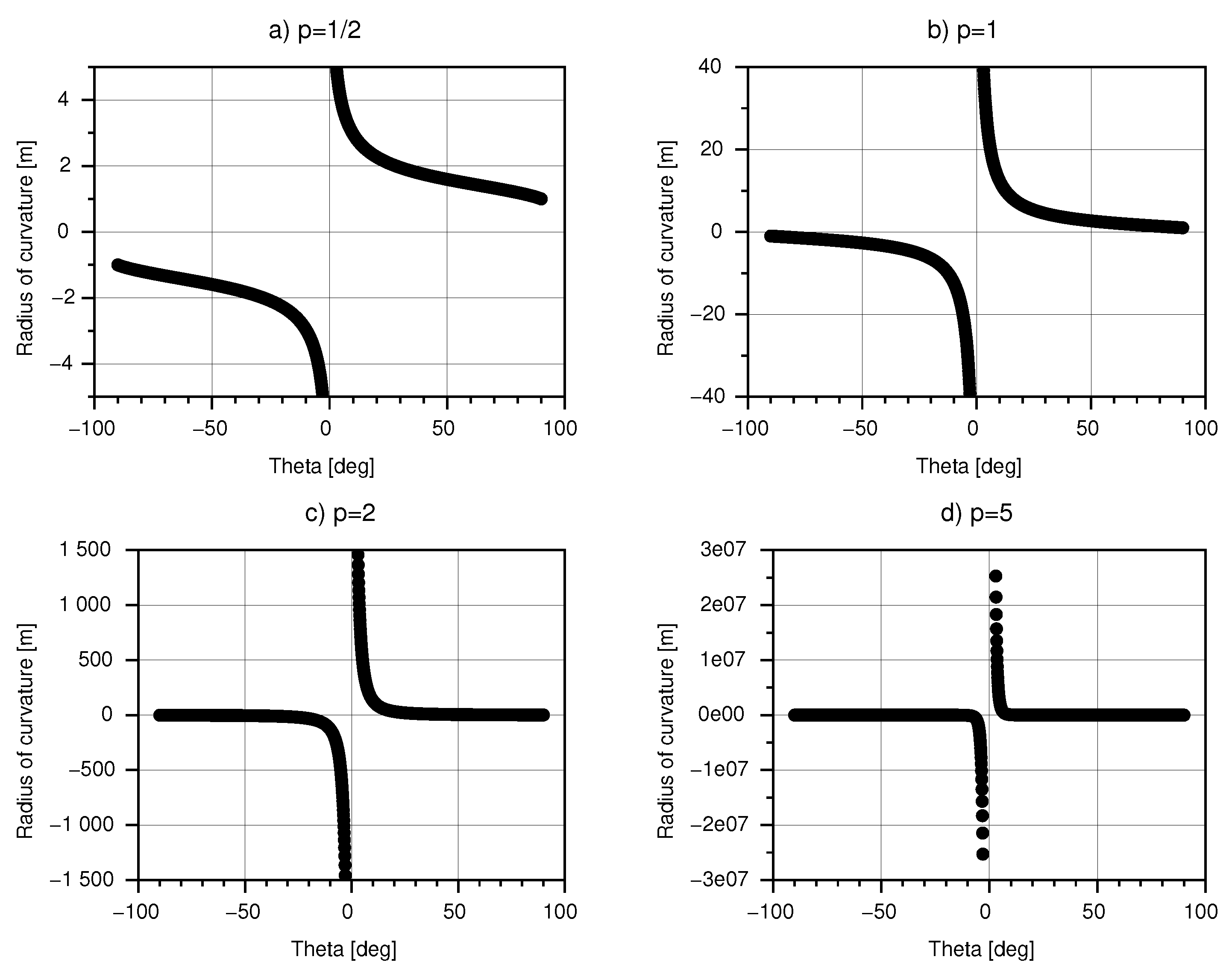
3.2. Analysis of the Radius of Curvature
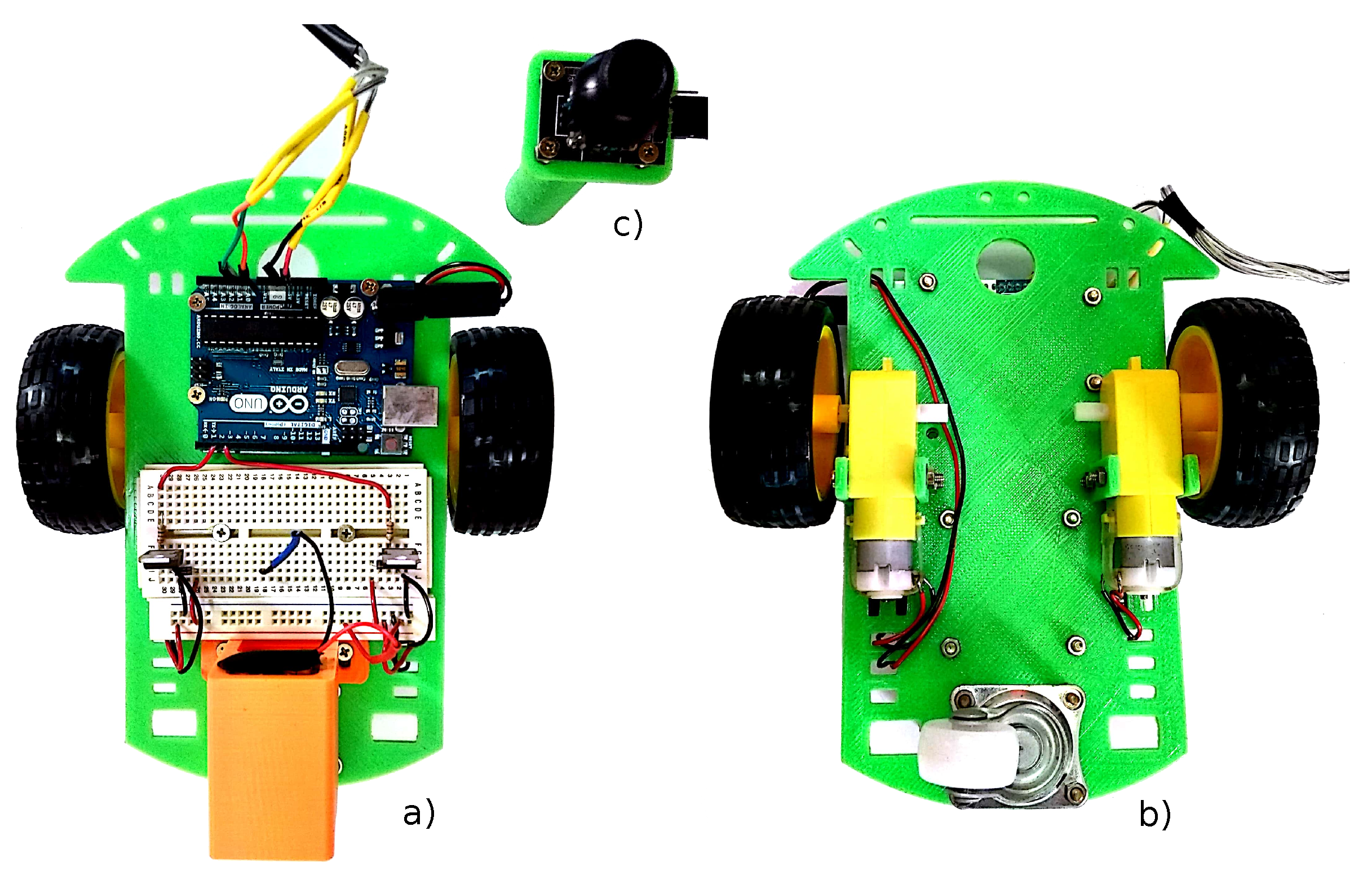
3.3. Experimentation Platform
4. Results
4.1. Simulation Results
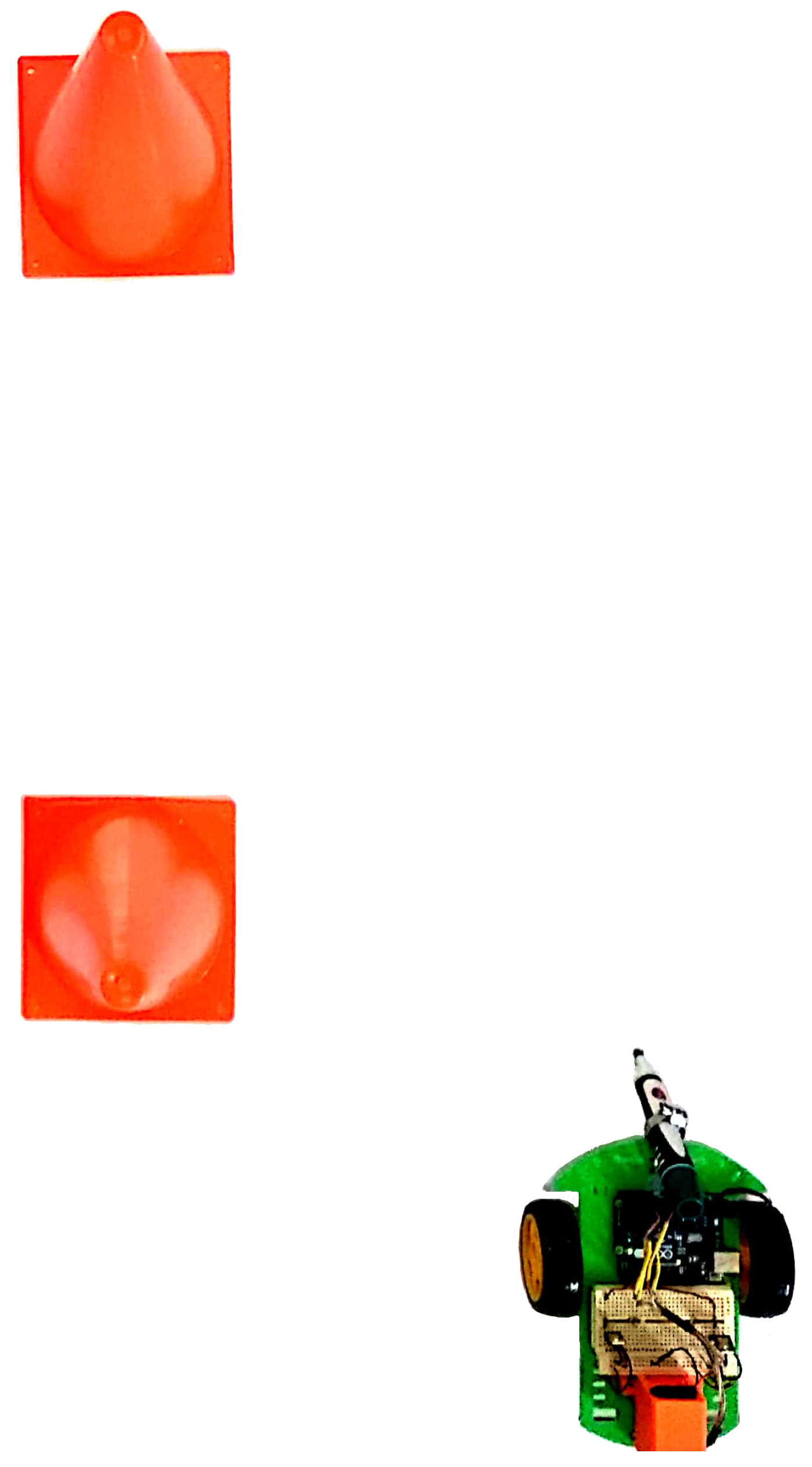
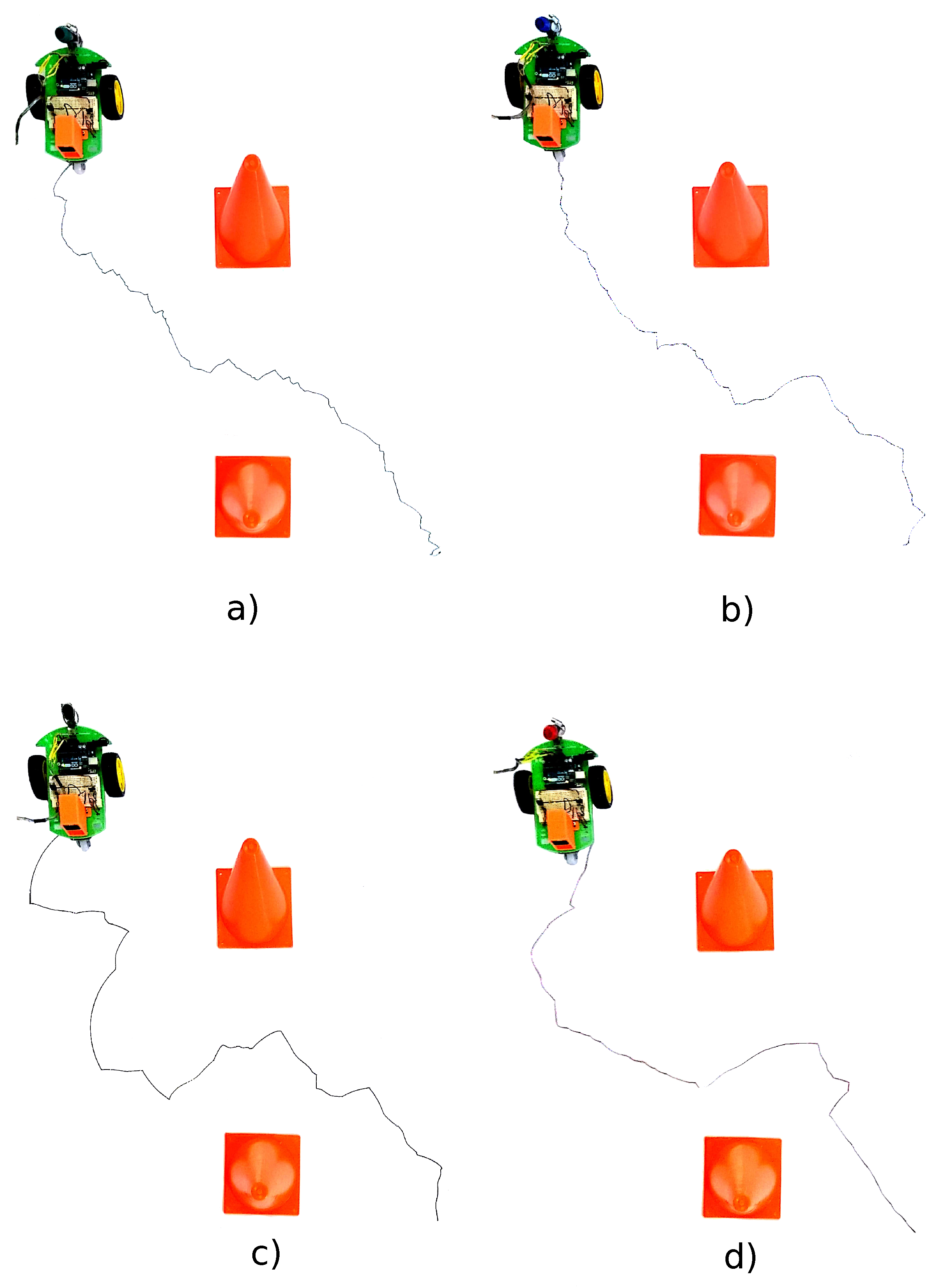
4.2. Experimental Results
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhao, H.; Duan, X.; Yang, G. Kinematics and dynamics modeling of a small mobile robot with tracked locomotion mode. In Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics (ROBIO), Tianjin, China, 14–18 December 2010; pp. 1276–1280. [Google Scholar]
- Fujiya, T.; Mikami, S.; Nakamura, T.; Hama, K. Locomotion method of a rescue robot with multi-legs and Omni-directional wheels. In Proceedings of the 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10–12 December 2014; pp. 1627–1630. [Google Scholar]
- Wang, X.; Wang, X.; Wang, H.; Lu, L.; Yu, H.; Vladareanu, L.; Melinte, D.O. Dynamic analysis for the leg mechanism of a wheel-leg hybrid rescue robot. In Proceedings of the 2014 UKACC International Conference on Control (CONTROL), Loughborough, UK, 9–11 July 2014; pp. 504–508. [Google Scholar]
- Van Sickle, D.; Cooper, R.; Ster, J. Wheelchair virtual joystick interface. In Proceedings of the IEEE 17th Annual Conference on Engineering in Medicine and Biology Society, Montreal, QC, Canada, 20–23 September 1995; Volume 2, pp. 1175–1176. [Google Scholar]
- Cooper, R.A.; Jones, D.K.; Fitzgerald, S.; Boninger, M.L.; Albright, S.J. Analysis of position and isometric joysticks for powered wheelchair driving. IEEE Trans. Biomed. Eng. 2000, 47, 902–910. [Google Scholar] [CrossRef] [PubMed]
- Haas, E.C.; Kunze, M. The effect of a vehicle control device on driver performance in a simulated tank driving task. In Proceedings of the First International Driving Symposium on Human Factors in Driving Assessment, Training and Vehicle Design, Aspen, CO, USA, 14–17 August 2001; pp. 143–146. [Google Scholar]
- Fattouh, A.; Sahnoun, M.; Bourhis, G. Force feedback joystick control of a powered wheelchair: Preliminary study. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, 10–13 October 2004; Volume 3, pp. 2640–2645. [Google Scholar]
- Rabhi, Y.; Mrabet, M.; Fnaiech, F.; Gorce, P. Intelligent joystick for controlling power wheelchair navigation. In Proceedings of the 2013 3rd International Conference on Systems and Control (ICSC), Algiers, Algeria, 29–31 October 2013; pp. 1020–1025. [Google Scholar]
- Rabhi, Y.; Mrabet, M.; Fnaiech, F. Optimized joystick control interface for electric powered wheelchairs. In Proceedings of the 2015 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Monastir, Tunisia, 21–23 December 2015; pp. 201–206. [Google Scholar]
- Nunes, W.R.B.M.; da Silva, N.; Covacic, M.R.; Junior, A.P.L. 3ph High Efficiency Induction Motors with IFOC Applied to a Wheelchair by Joystick. IEEE Latin Am. Trans. 2016, 14, 2041–2051. [Google Scholar] [CrossRef]
- Xia, C.; Zhang, C. Power management strategy of hybrid electric vehicles based on quadratic performance index. Energies 2015, 8, 12458–12473. [Google Scholar] [CrossRef]
- Ali, A.M.; Söffker, D. Towards Optimal Power Management of Hybrid Electric Vehicles in Real-Time: A Review on Methods, Challenges, and State-Of-The-Art Solutions. Energies 2018, 11, 476. [Google Scholar]
- Zhang, X.; Mi, C. Vehicle Power Management: Modeling, Control and Optimization; Springer Science & Business Media: London, UK, 2011. [Google Scholar]
- Maulana, E.; Muslim, M.A.; Zainuri, A. Inverse kinematics of a two-wheeled differential drive an autonomous mobile robot. In Proceedings of the Electrical Power, Electronics, Communications, Controls and Informatics Seminar (EECCIS), Malang, Indonesia, 27–28 August 2014; pp. 93–98. [Google Scholar]
- Tsai, M.C.; Hsueh, P.W. Synchronized motion control for 2D joystick-based electric wheelchair driven by two wheel motors. In Proceedings of the 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Kaohsiung, Taiwan, 11–14 July 2012; pp. 702–707. [Google Scholar]
- Rabhi, Y.; Mrabet, M.; Fnaiech, F. Development of a New Intelligent Joystick for People with Reduced Mobility. Appl. Bionics Biomech. 2018, 2018. [Google Scholar] [CrossRef]
- Yoon, H.; Seo, H.H.; Park, Y.W.; Choi, H.T. A new minimum infinity-norm solution: With application to capacity analysis of spacecraft reaction wheels. In Proceedings of the American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 1241–1245. [Google Scholar]
- Hyun, N.S.P.; Vela, P.A.; Verriest, E.I. A New Framework for Optimal Path Planning of Rectangular Robots Using a Weighted L_p Norm. IEEE Robotics Autom. Lett. 2017, 2, 1460–1465. [Google Scholar] [CrossRef]
- Villarreal, B.L.; Gordillo, J.L. Directional aptitude analysis in odor source localization techniques for rescue robots applications. In Proceedings of the 2011 10th Mexican International Conference on Artificial Intelligence (MICAI), Aguascalientes, Mexico, 4–10 November 2011; pp. 109–114. [Google Scholar]
- Babazadeh, R.; Khiabani, A.G.; Azmi, H. Optimal control of Segway personal transporter. In Proceedings of the 2016 4th International Conference on Control, Instrumentation, and Automation (ICCIA), Qazvin, Iran, 27–28 January 2016; pp. 18–22. [Google Scholar]
- Li, W.; Liu, B.; Kosasih, P.B.; Zhang, X. A 2-DOF MR actuator joystick for virtual reality applications. Sens. Actuators A Phys. 2007, 137, 308–320. [Google Scholar] [CrossRef]
- Nasif, S.; Khan, M.A.G. Wireless head gesture controlled wheel chair for disable persons. In Proceedings of the Humanitarian Technology Conference (R10-HTC), 2017 IEEE Region 10, Dhaka, Bangladesh, 21–23 December 2017; pp. 156–161. [Google Scholar]
- Fortuna, L.; Muscato, G. A roll stabilization system for a monohull ship: modeling, identification, and adaptive control. IEEE Trans. Control Syst. Technol. 1996, 4, 18–28. [Google Scholar] [CrossRef]
- Karvinen, T.; Karvinen, K.; Valtokari, V. Make: Sensors. Projects and Experiments to Measure the World with Arduino and Raspberry Pi; Marker Media: Sebastopol, CA, USA, 2014. [Google Scholar]
- Abdolmaleki, A.; GhasemAghaee, N.; Reza, M.; Monadjemi, A. Robust humanoid turning-in-place using fourier series and genetic algorithm. In Proceedings of the 2011 4th International Conference on Modeling, Simulation and Applied Optimization (ICMSAO), Kuala Lumpur, Malaysia, 19–21 April 2011; pp. 1–5. [Google Scholar]
- Said, A.; Rodriguez-Leal, E.; Soto, R.; Gordillo, J.; Garrido, L. Decoupled closed-form solution for humanoid lower limb kinematics. Math. Prob. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- Jia, Q.; Cao, X.; Sun, H.; Song, J. A novel design of a two-wheeled robot. In Proceedings of the Conference on Industrial Electronics and Applications, ICIEA 2007, Harbin, China, 23–25 May 2007; pp. 1226–1231. [Google Scholar]
- Cho, S.K.; Jin, H.Z.; Lee, J.M.; Yao, B. Teleoperation of a mobile robot using a force-reflection joystick with sensing mechanism of rotating magnetic field. IEEE/ASME Trans. Mech. 2010, 15, 17–26. [Google Scholar]
- Gravagne, I.A.; Walker, I.D. On the structure of minimum effort solutions with application to kinematic redundancy resolution. IEEE Trans. Robot. Autom. 2000, 16, 855–863. [Google Scholar] [CrossRef]
- Mohan, N.; Undeland, T.M. Power Electronics: Converters, Applications, and Design; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Said, A.; Davizón, Y.A.; Espino-Román, P.; Rodríguez-Said, R.; Hernández-Santos, C. Automatic Frequency Identification under Sample Loss in Sinusoidal Pulse Width Modulation Signals Using an Iterative Autocorrelation Algorithm. Symmetry 2016, 8, 78. [Google Scholar] [CrossRef]
- Chwa, D. Robust Distance-Based Tracking Control of Wheeled Mobile Robots Using Vision Sensors in the Presence of Kinematic Disturbances. IEEE Trans. Ind. Electron. 2016, 63, 6172–6183. [Google Scholar] [CrossRef]
- Group, E. SciLab [Numeric Calculus Software]. Available online: http://www.scilab.org/ (accessed on 15 July 2018).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forward | CW | CCW | ||||
|---|---|---|---|---|---|---|
| p | ||||||
| 0.25 | 0.25 | 0.25 | 0 | 0 | 0.25 | |
| 1 | 0.5 | 0.5 | 0.5 | 0 | 0 | 0.5 |
| 2 | 0.707 | 0.707 | 0.707 | 0 | 0 | 0.707 |
| 3 | 0.793 | 0.793 | 0.793 | 0 | 0 | 0.793 |
| 5 | 0.87 | 0.87 | 0.87 | 0 | 0 | 0.87 |
| 8 | 0.917 | 0.917 | 0.917 | 0 | 0 | 0.917 |
| 20 | 0.965 | 0.965 | 0.965 | 0 | 0 | 0.965 |
| 100 | 0.993 | 0.993 | 0.993 | 0 | 0 | 0.993 |
| −1 | −1 | −1 | −1 | |
| −1.45 | −2.15 | −3 | −3.65 | |
| −1.95 | −4.46 | −13.92 | −160.83 | |
| −4.91 | −39.16 | −1458.35 | −25,294,220 | |
| 4.91 | 39.16 | 1458.35 | 25,294,220 | |
| 1.95 | 4.46 | 13.92 | 160.83 | |
| 1.45 | 2.15 | 3 | 3.65 | |
| 1 | 1 | 1 | 1 |
| p | R [cm] | ||
|---|---|---|---|
| 0.707 | 0.176 | 23.8080 | |
| 1 | 0.707 | 0.353 | 32.4630 |
| 2 | 0.707 | 0.499 | 50.6870 |
| 5 | 0.707 | 0.615 | 106.402 |
| p | Voltage [V] | Current [A] | Power [W] |
|---|---|---|---|
| 5.50 | 0.28 | 1.54 | |
| 1 | 6.83 | 0.32 | 2.18 |
| 2 | 7.20 | 0.34 | 2.44 |
| 5 | 8.00 | 0.37 | 2.96 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Said, A.; Davizón, Y.; Soto, R.; Félix-Herrán, C.; Hernández-Santos, C.; Espino-Román, P. An Infinite-Norm Algorithm for Joystick Kinematic Control of Two-Wheeled Vehicles. Electronics 2018, 7, 164. https://doi.org/10.3390/electronics7090164
Said A, Davizón Y, Soto R, Félix-Herrán C, Hernández-Santos C, Espino-Román P. An Infinite-Norm Algorithm for Joystick Kinematic Control of Two-Wheeled Vehicles. Electronics. 2018; 7(9):164. https://doi.org/10.3390/electronics7090164
Chicago/Turabian StyleSaid, Alejandro, Yasser Davizón, Rogelio Soto, Carlos Félix-Herrán, Carlos Hernández-Santos, and Piero Espino-Román. 2018. "An Infinite-Norm Algorithm for Joystick Kinematic Control of Two-Wheeled Vehicles" Electronics 7, no. 9: 164. https://doi.org/10.3390/electronics7090164
APA StyleSaid, A., Davizón, Y., Soto, R., Félix-Herrán, C., Hernández-Santos, C., & Espino-Román, P. (2018). An Infinite-Norm Algorithm for Joystick Kinematic Control of Two-Wheeled Vehicles. Electronics, 7(9), 164. https://doi.org/10.3390/electronics7090164