Improving Intelligence and Efficiency of Salt Lake Production by Applying a Decision Support System Based on IOT for Brine Pump Management

 ,
,  ,
, 
Abstract
1. Introduction
2. System Requirements Analysis and Architecture Design
2.1. Decision Support System Requirements Analysis
2.1.1. Field Observation and Interview
- What kind of monitoring equipment is used in the enterprise, which monitoring method is adopted, which parameters are monitored and what is the monitoring period?
- Whether the existing monitoring parameters can fully characterize the operation status of the brine pump, whether there is a new monitoring requirement for the brine pump, and which parameters should be added with the existing parameters to describe the operation status of these brine pumps.
- How do maintenance workers judge whether the brine pump is faulty or not, and how do they deal with the fault when the failure occurs?
- What kind of equipment is used to record dynamic monitoring data, static information, maintenance information and fault information?
- Where the enterprise intends to install the remote monitoring equipment and the number of items of equipment installed.
2.1.2. System Functional Requirements
2.1.3. System Technical Requirements
2.2. Decision Support System Architecture Design
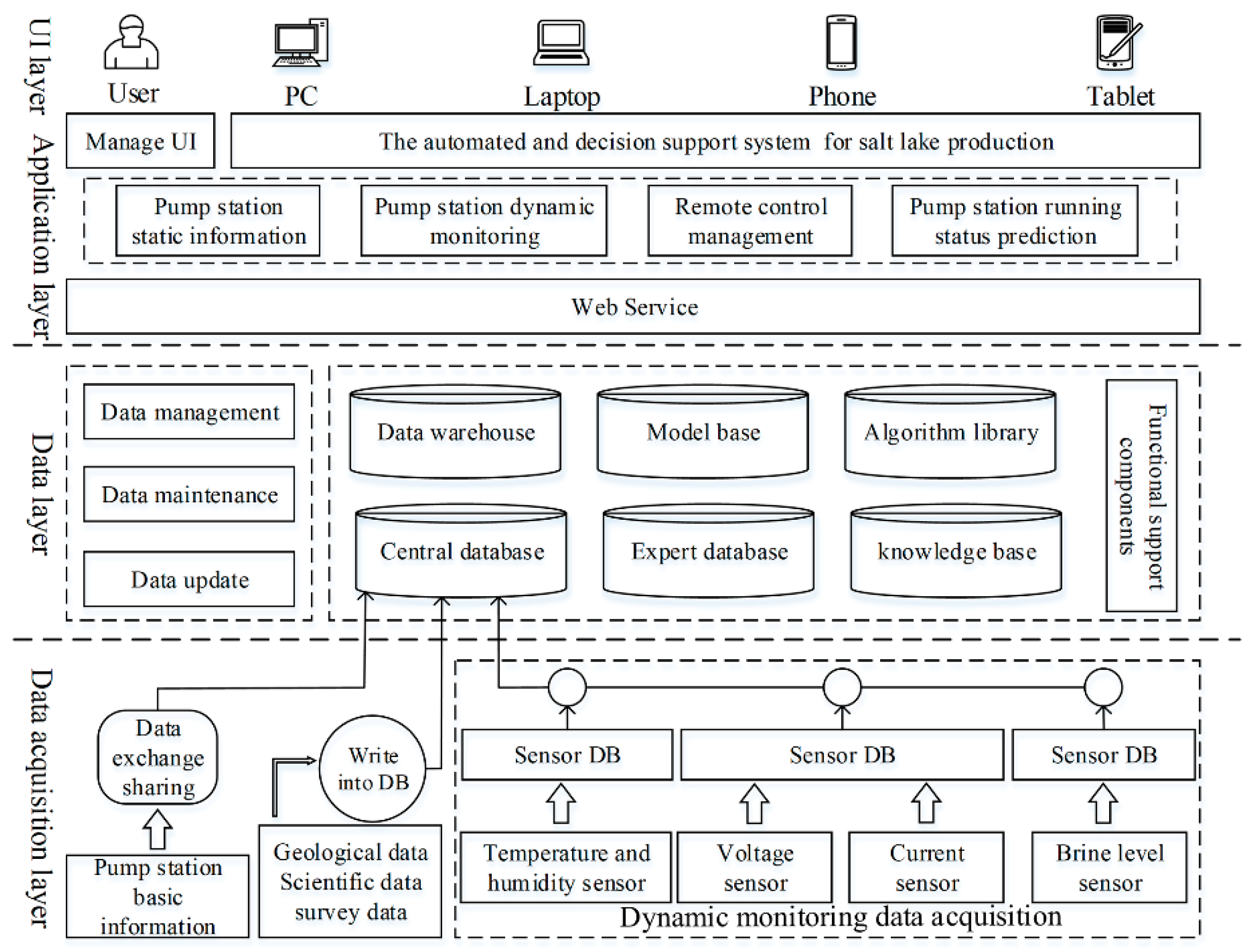
2.2.1. System Overall Architecture Design
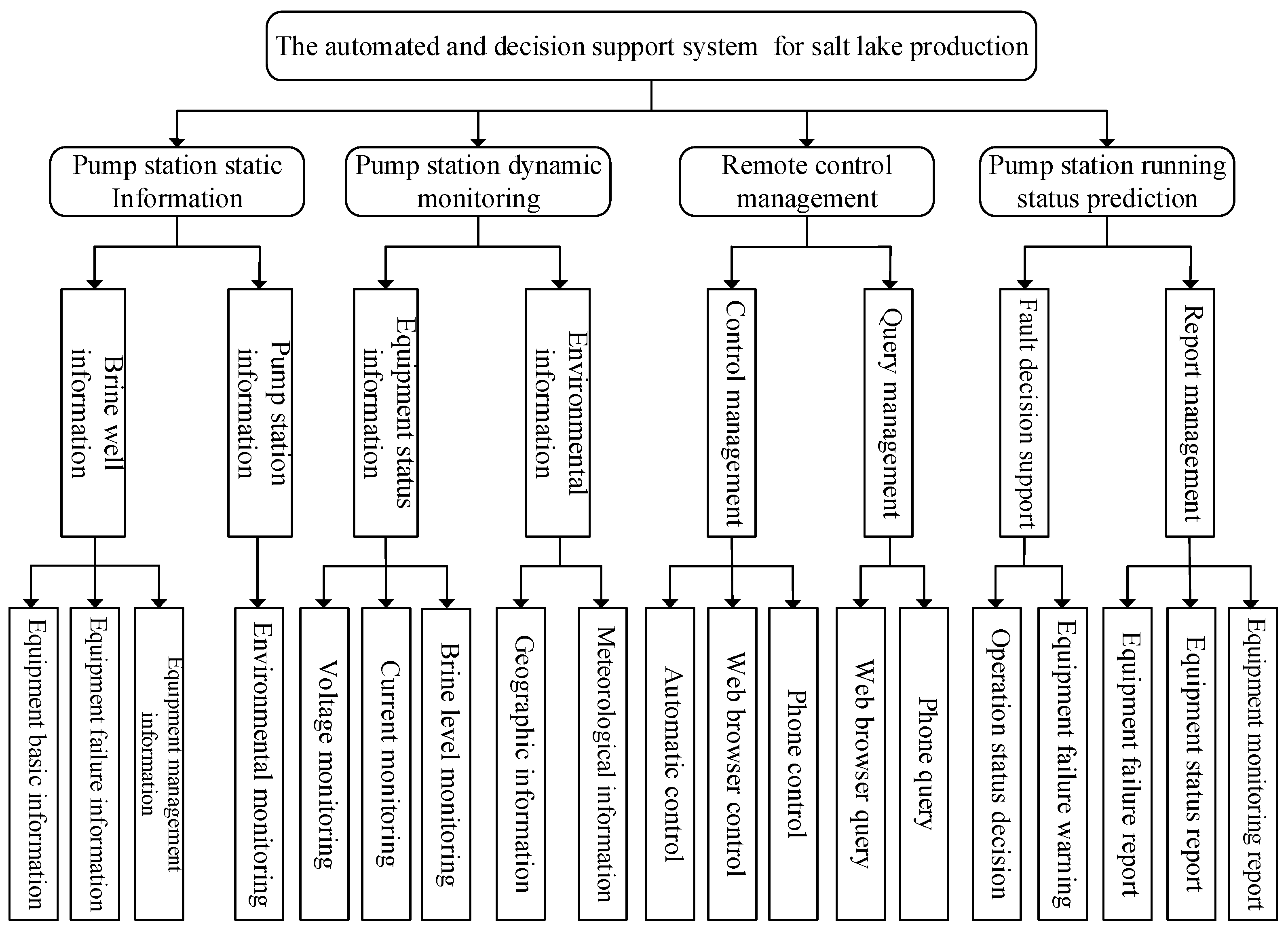
2.2.2. System Functional Structure Design
- Pump station static information subsystem: this includes the type of pump station, the location and the equipment in the pump station, such as the location of the brine wells and well depth, brine pump and mixed flow pump nameplate, downhole depth, manufacturers and purchase prices, etc.
- Pump station dynamic monitoring subsystem: this is responsible for collecting, transmitting, storing and processing information of the brine pump running status (voltage, current and liquid level of the brine well equipment) in the pump station, and entering the meteorological and geological information in the mining area.
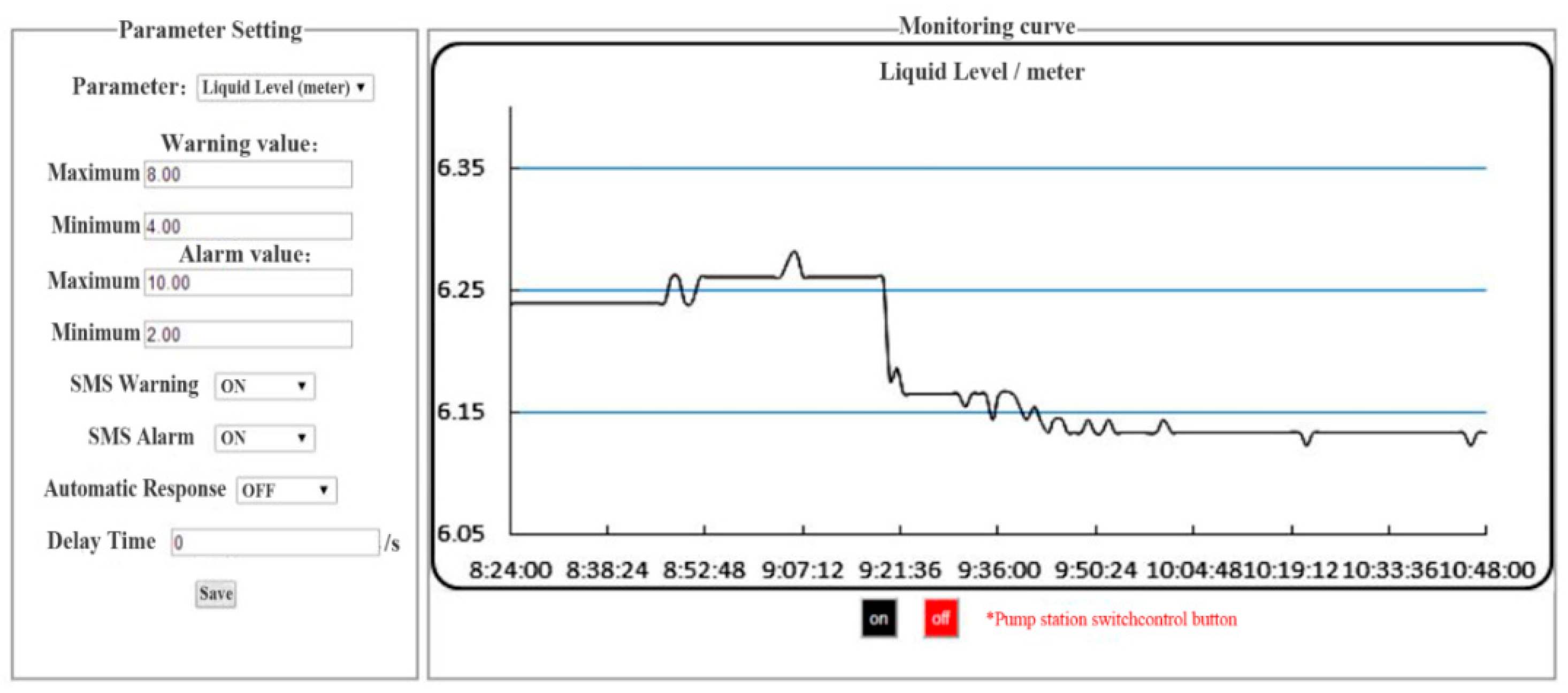
- Remote-control management subsystem: this is in charge of remotely controlling and inquiring about the running status of the brine equipment. According to the early warning information received from the decision support system, staff can realize the control function of the brine equipment through two ways, mobile phone or Web browser.
- Pump station running state prediction subsystem: this provides monitoring data, fault information, basic information and other decision-making information for the management of the enterprise at all levels, in order to quickly and scientifically make appropriate decision-making programs. According to the operation status information (voltage, current and liquid level), the subsystem can carry out the early warning, which includes the system early warning and the SMS (Short Message Service) warning to ensure that the warning information can be conveyed to the brine equipment maintenance personnel and management personnel. Among them, the system early warning is connected with the server in the web browser to pop up in the dialog box to notify the watch and management personnel; the SMS warning is through an SMS message in time to send early warning information to the early warning contact. After the user logs in to the system, they can set the early warning strategy, the early warning retransmission time, the alarm contact address book, and so on [23,24].
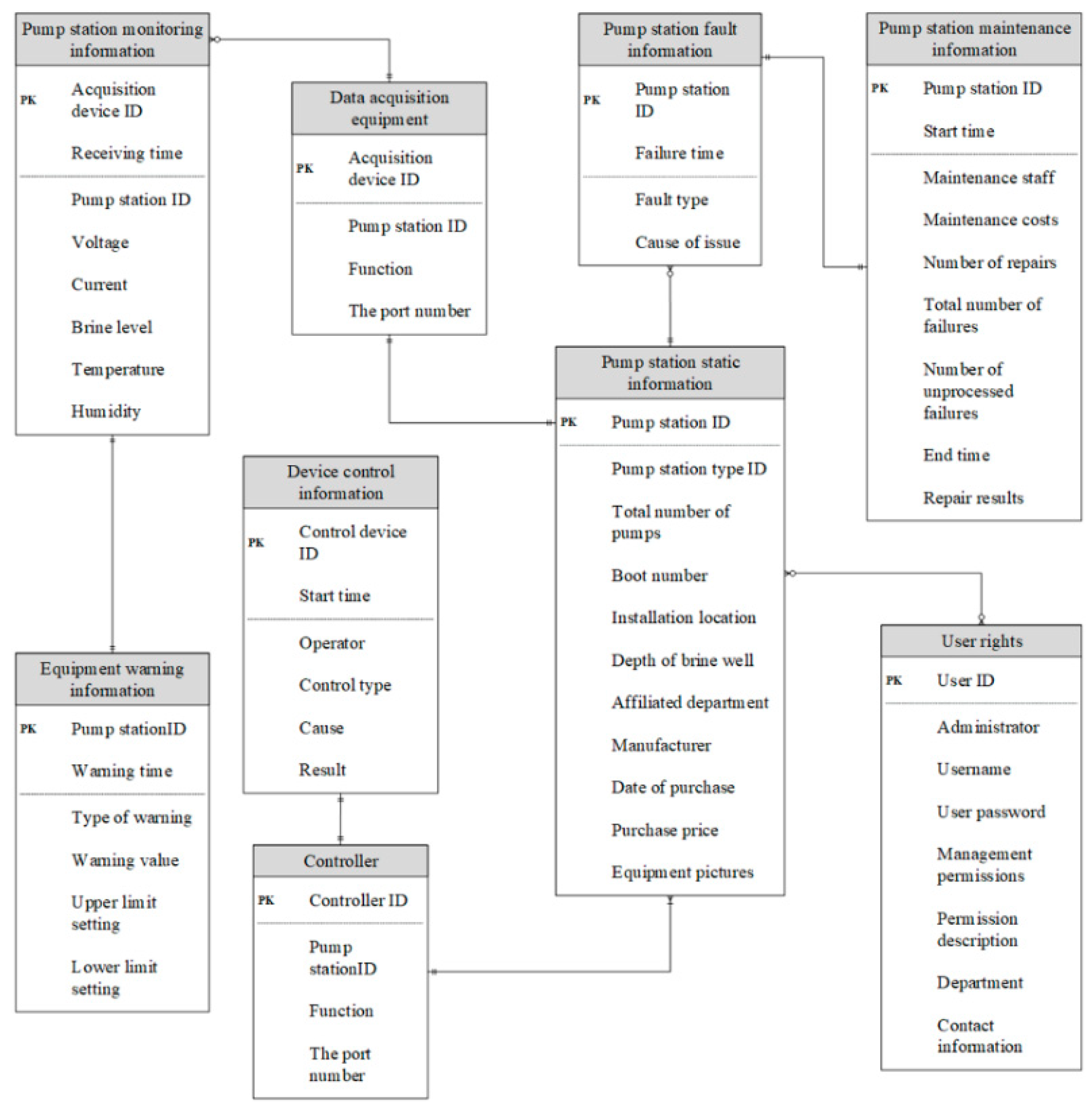
2.2.3. System Center Database Design
3. Key Models of the Decision Support System
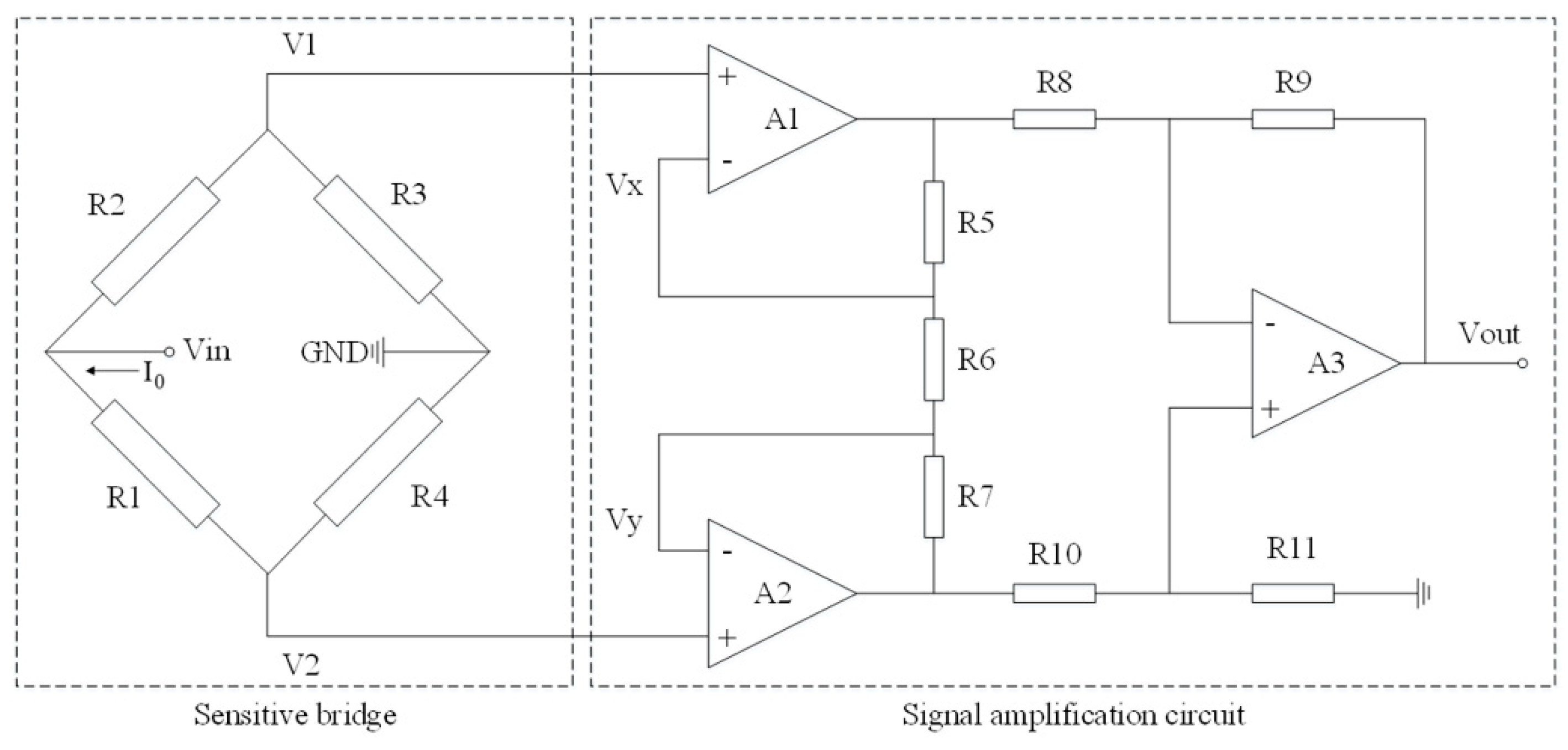
3.1. Measurement Model of Dynamic Liquid Level in Brine Well
3.2. Decision Model of Brine Pump Operation Condition
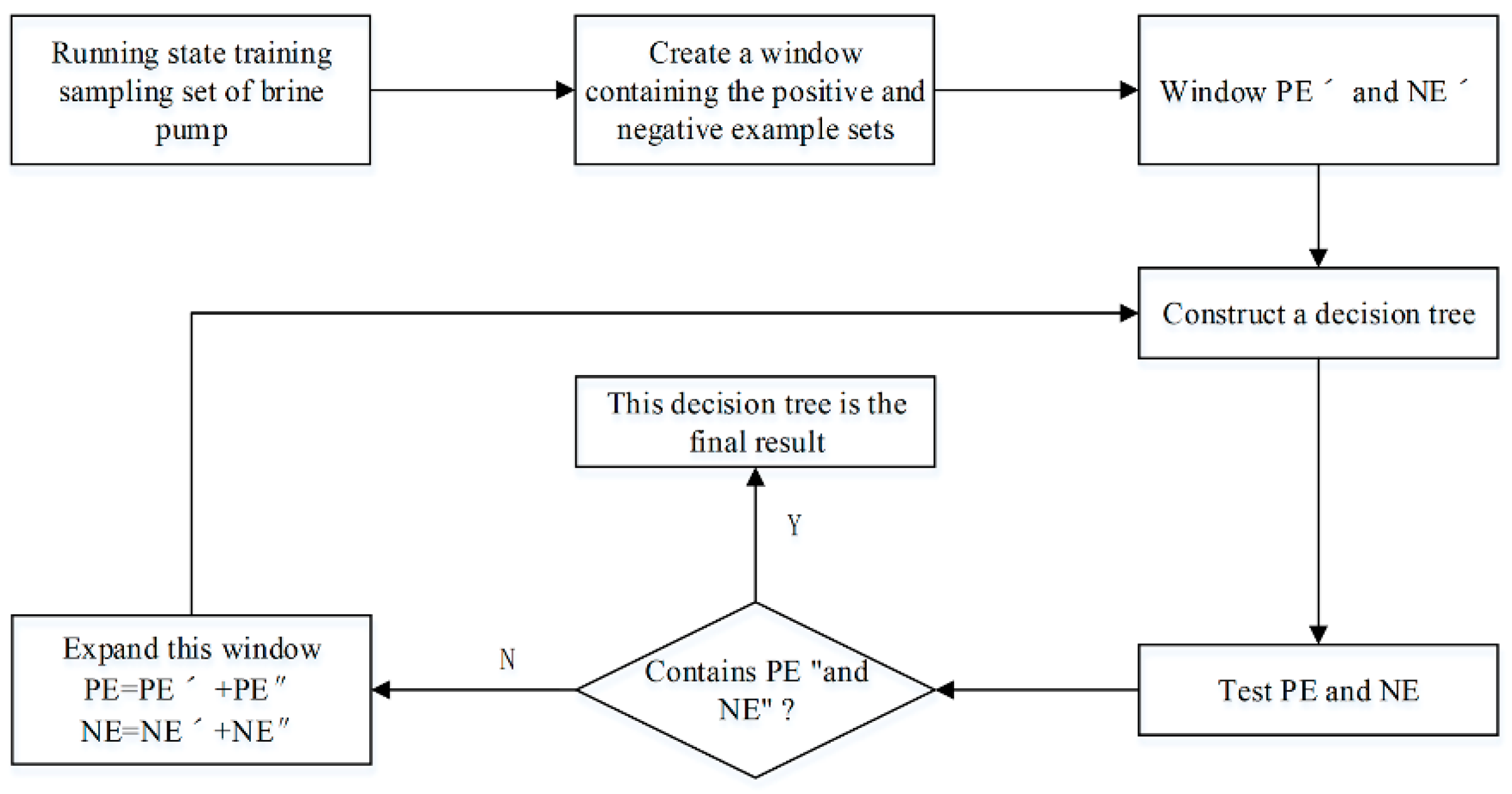
3.2.1. Decision Model Architecture Based on Iterative Dichotomiser 3
- (1)
- (2)
- Select the maximum mutual information of description attribute as the root node of the tree (or subtree).
- (3)
- Divide tuples that take the same value at the description attribute into the same subset, and take that value as a branch of this root node. The number of subsets equals the number of branches.
- (4)
- Recursive call contribution algorithm for the above subsets.
- (5)
- If the subset contains only positive or counter-examples, the corresponding branch is marked P or N.
- (6)
- Repeat step (5) to check the unprocessed subset one by one until all subsets have marked the category (P or N).
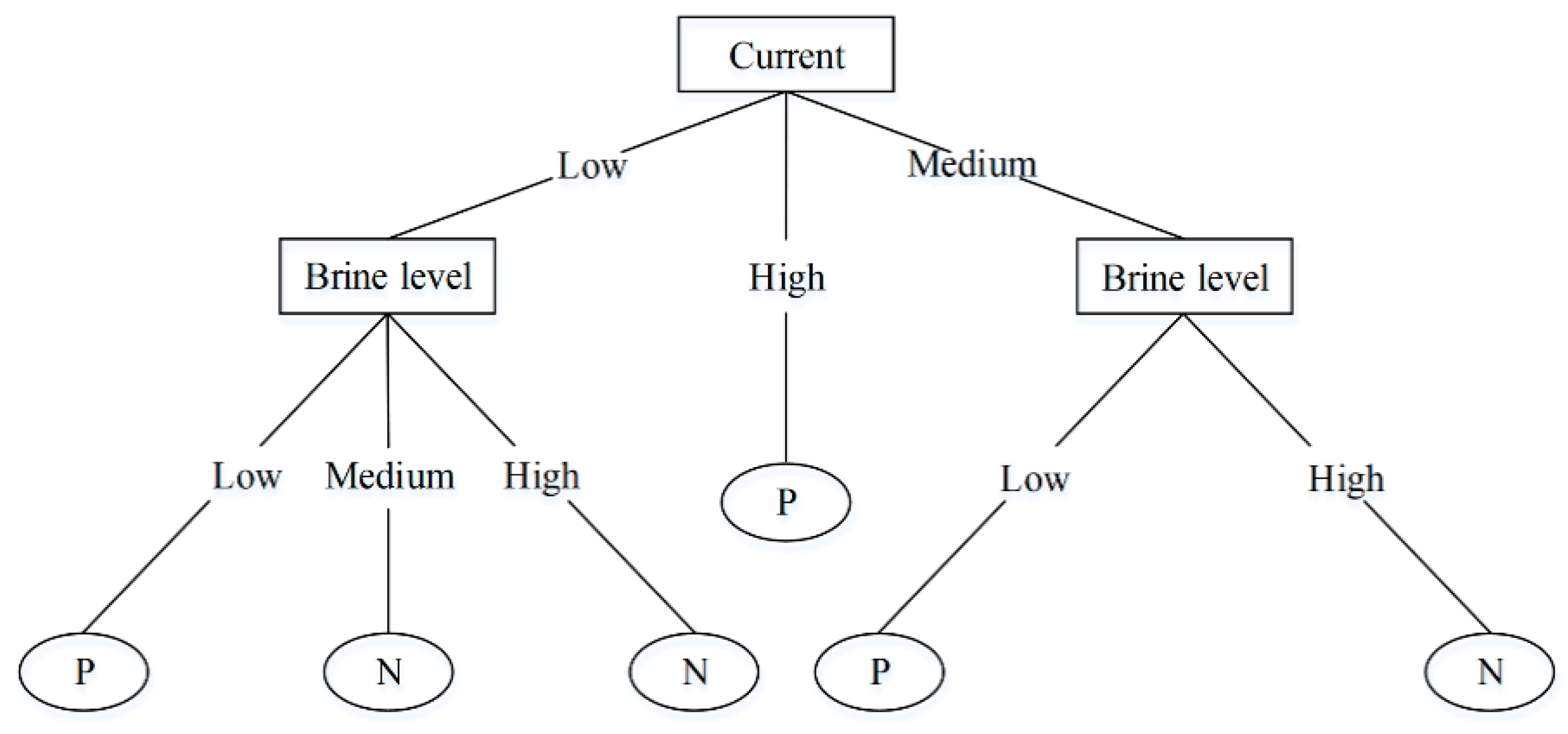
3.2.2. Construction of Decision Tree Using Iterative Dichotomiser 3
- Description attribute 1: current, low (Less than 0.8 times the rating value I); medium (0.8 times the rating value ~1.2 times the rating value I); high (Greater than 1.2 times the rating value I).
- Description attribute 2: voltage, low (Less than −10% of the rated value U); medium (−10% of the rated value U ~10% of the rated value U); high (Greater than 10% of rated value U).
- Description attribute 3: brine level, low (less than 2 m); medium (2 m~5 m) high (higher than 5 m).
3.2.3. Extract Classification Rules from Decision Tree
4. System Implementation, Test Evaluation and Discussion
4.1. System Implementation
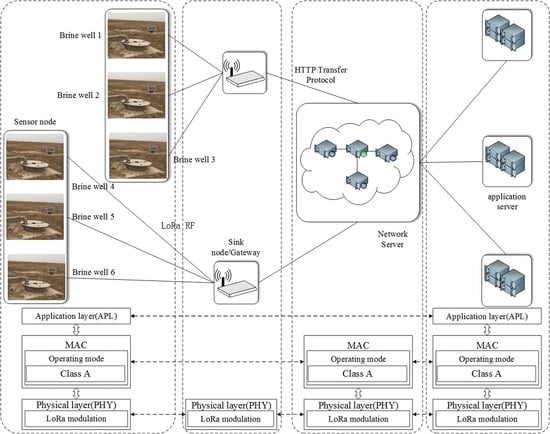
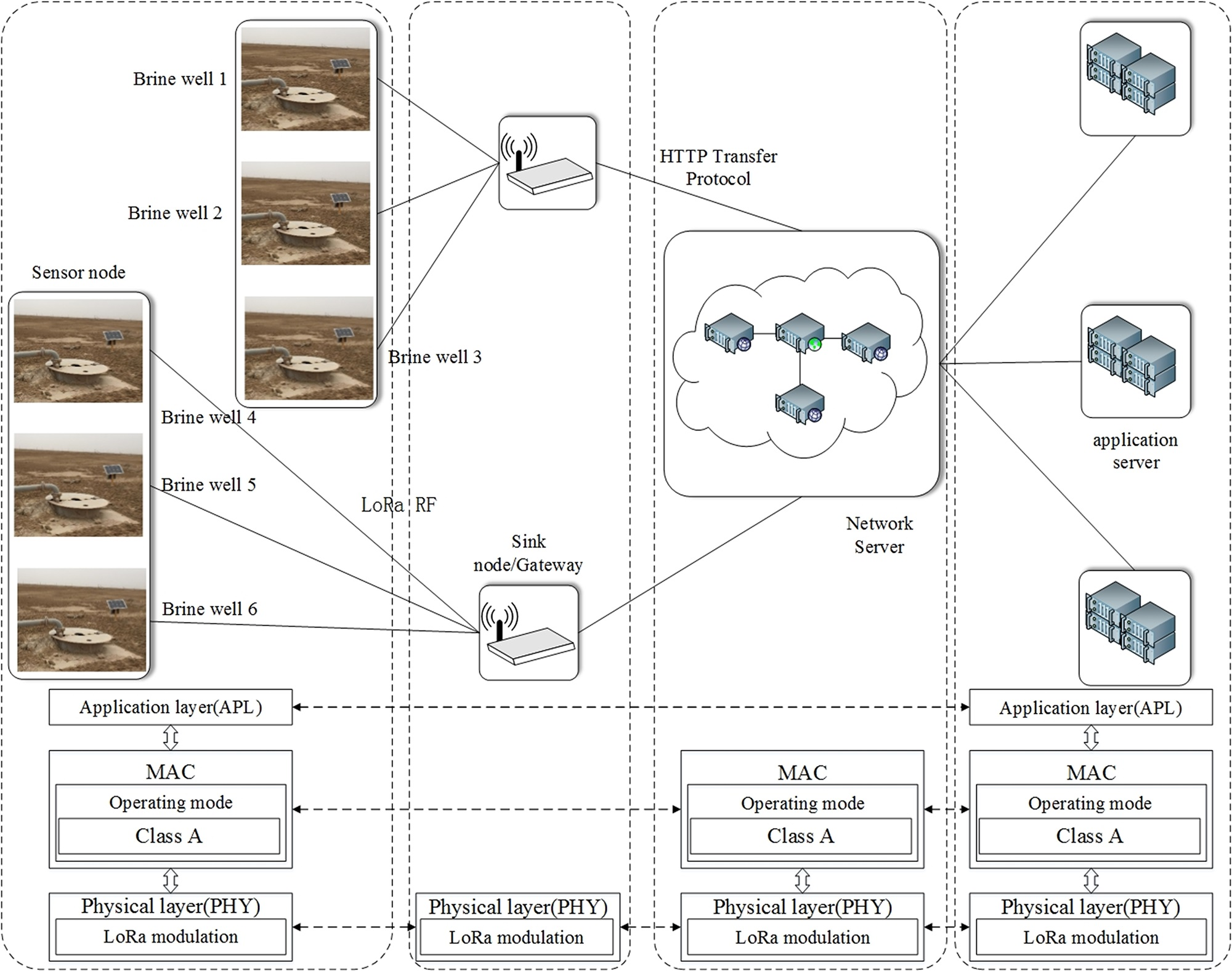
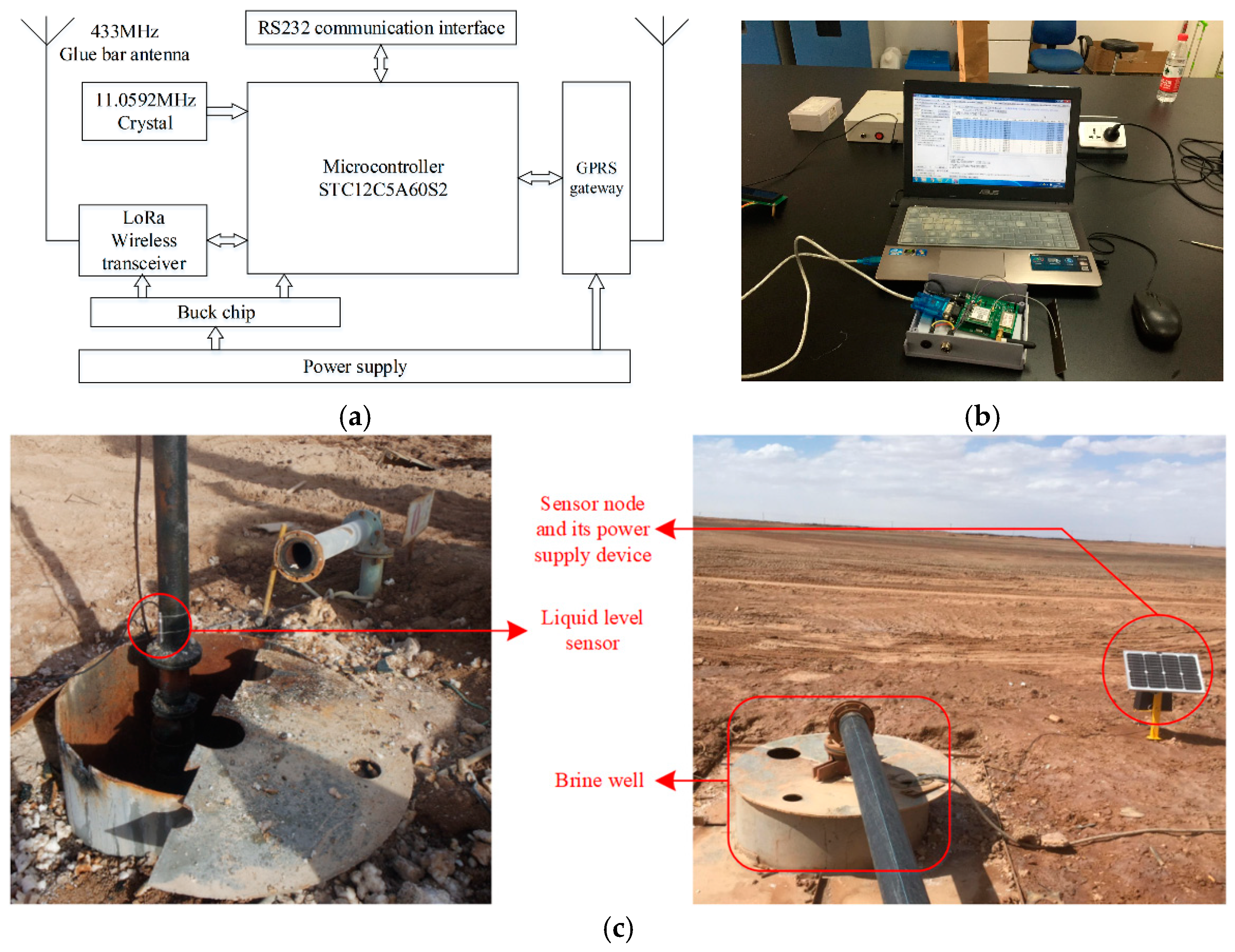
4.1.1. Realization of Information Acquisition and Transmission
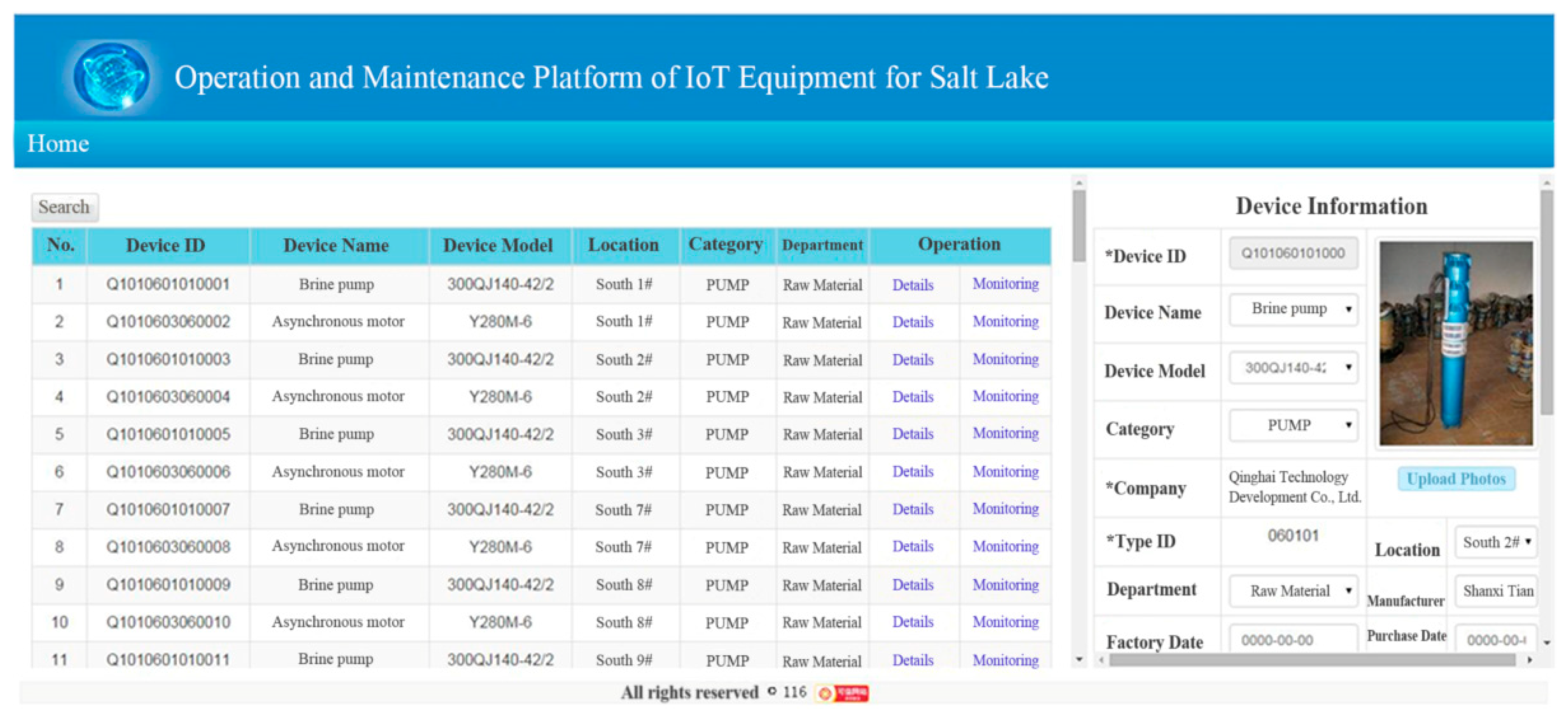
4.1.2. Realization of the Decision Support System Software
4.2. System Test and Evaluation
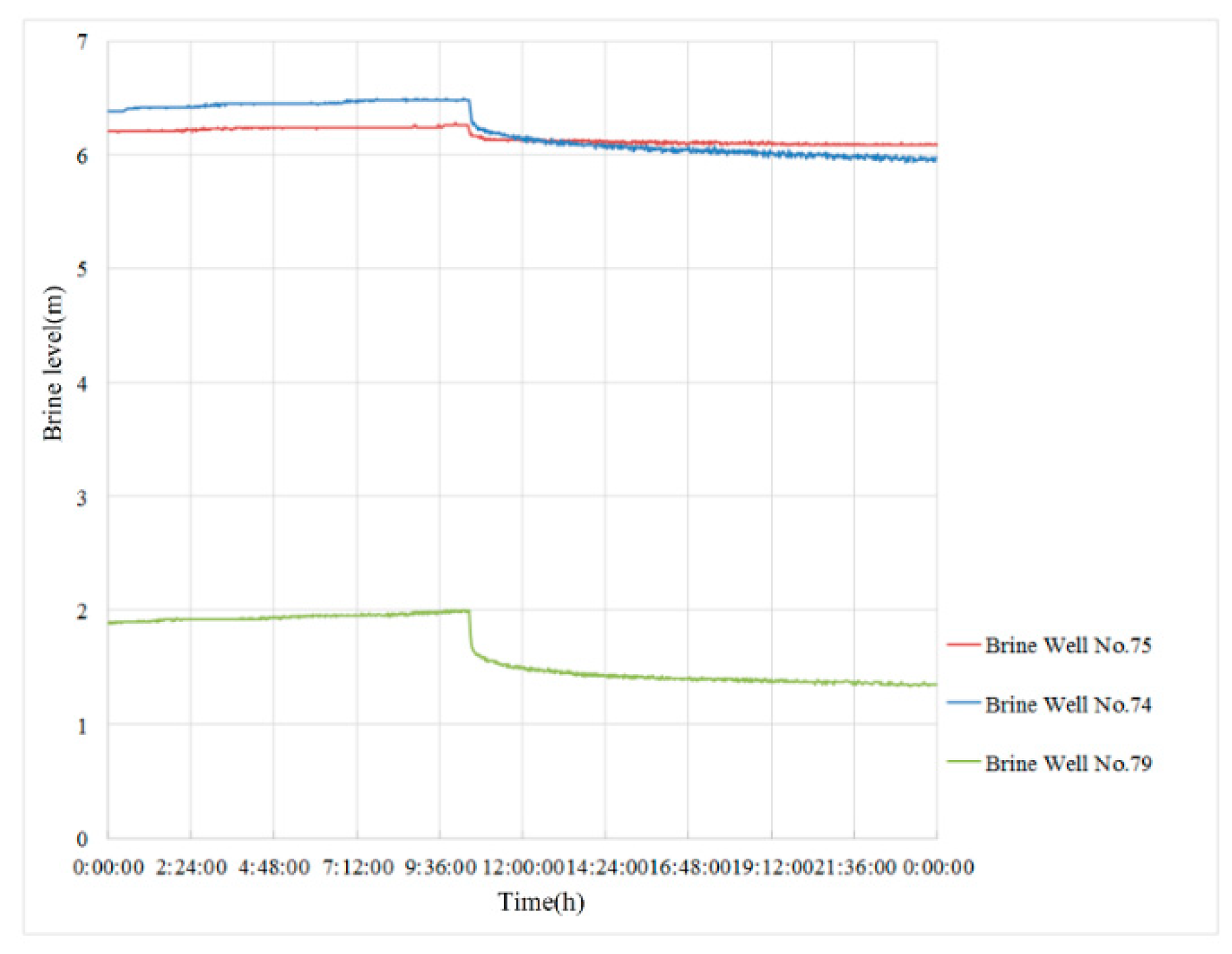
4.2.1. Sensor Measurement Test
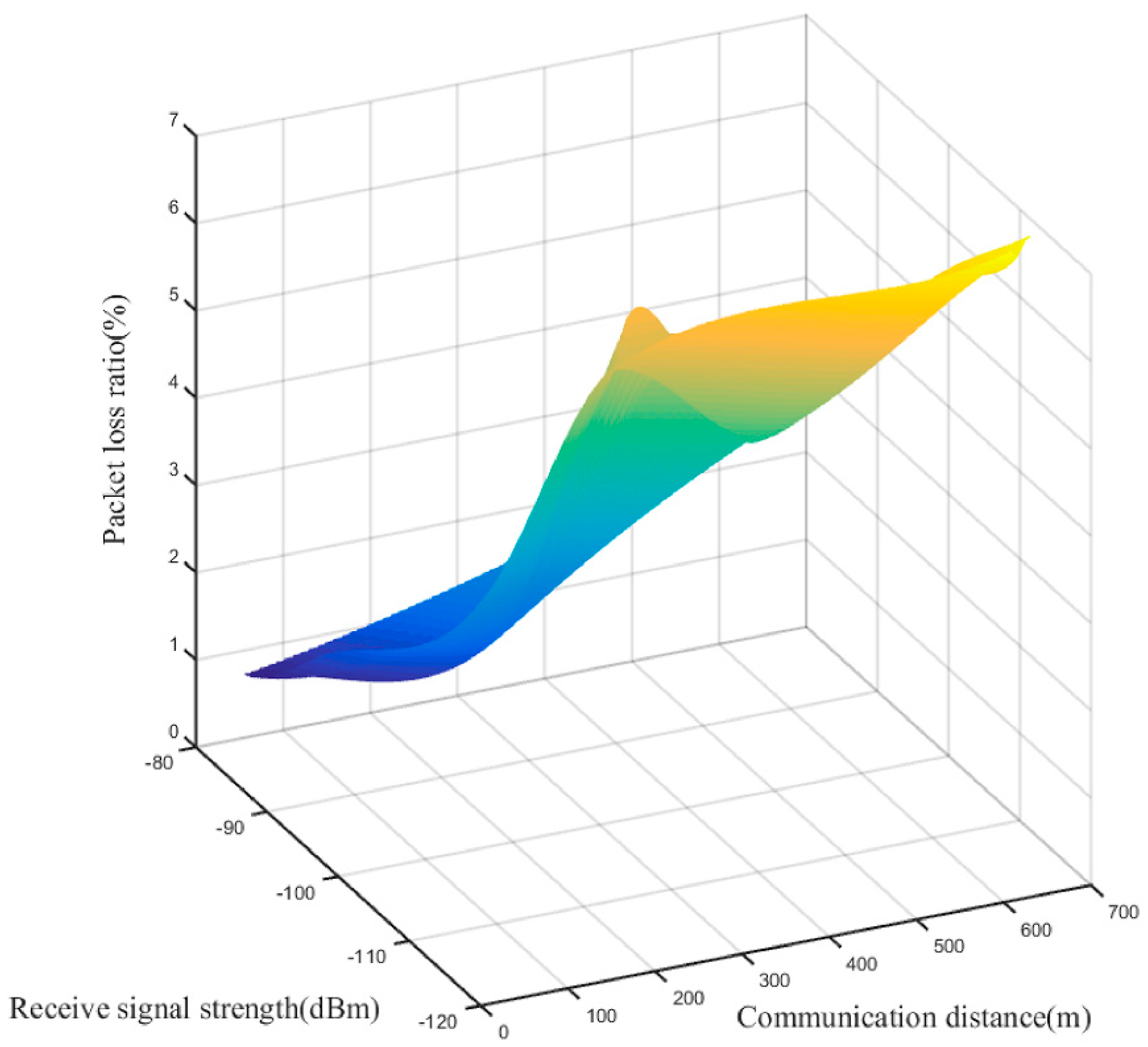
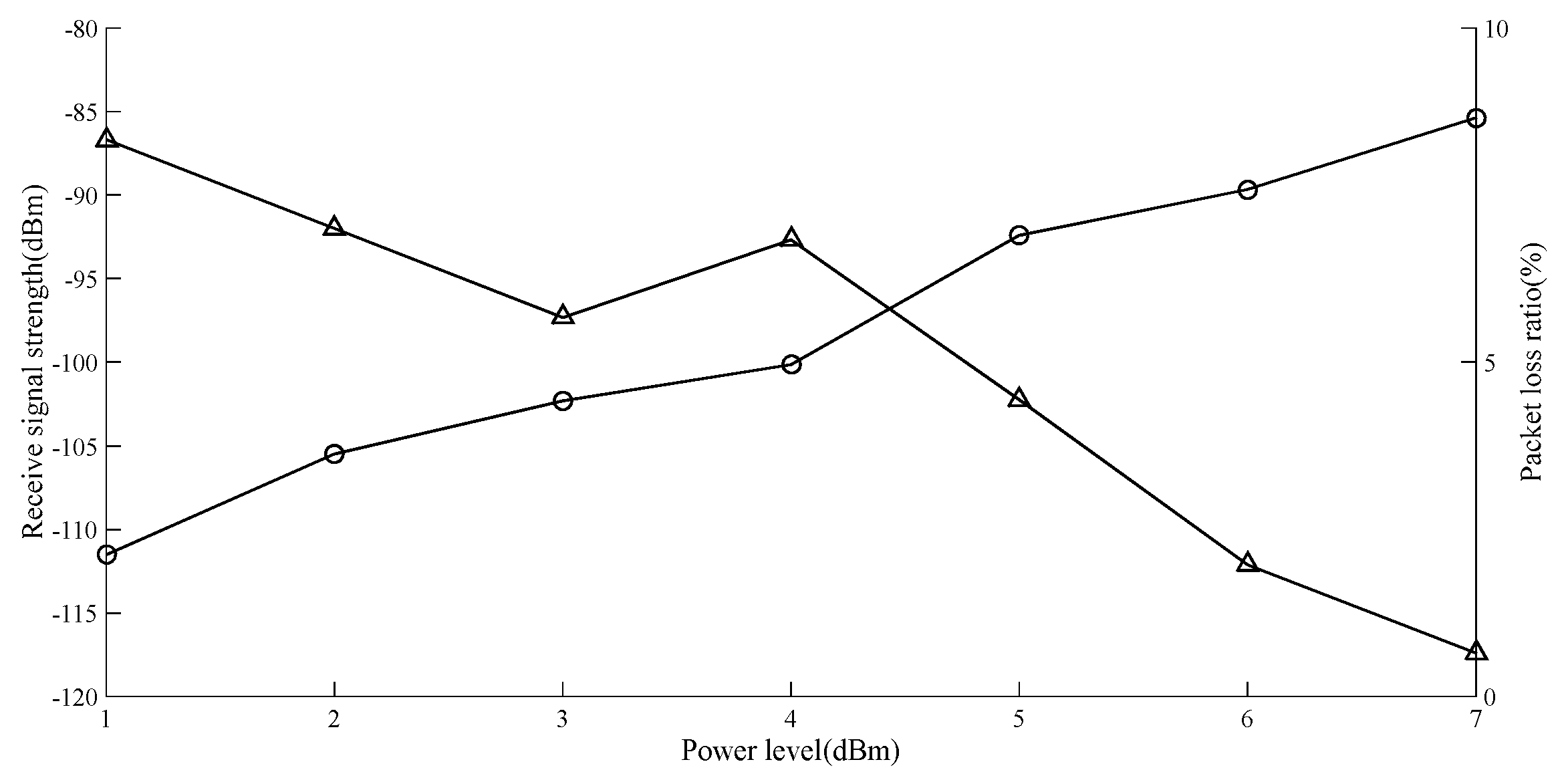
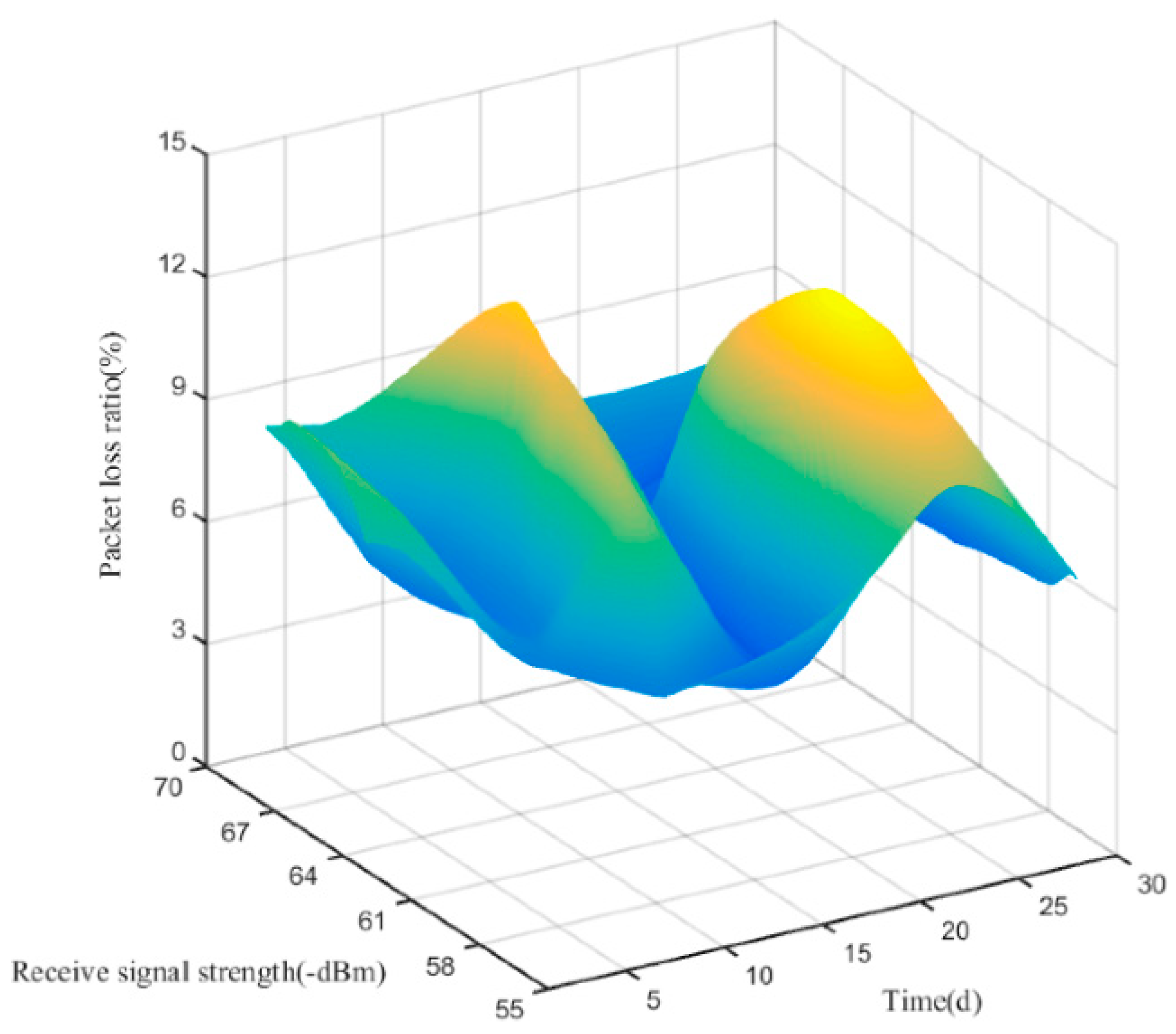
4.2.2. Reliability Test of Communication Link
4.2.3. System Assessment Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yu, J.; Hong, R.; Gao, C.; Cheng, A.; Zhang, L. Pinnoite Deposit in DaQaidam Saline Lake, Qaidam Basin, China: Hydroclimatic, Sedimentologic, and Geochemical Constraints. Minerals 2018, 8, 258. [Google Scholar] [CrossRef]
- Zheng, M.; Liu, X. Hydrochemistry of Salt Lakes of the Qinghai-Tibet Plateau, China. Aquat. Geochem. 2009, 15, 293–320. [Google Scholar] [CrossRef]
- Kong, R.; Xue, F.; Wang, J.; Zhai, H.; Zhao, L. Research on Mineral Resources and Environment of Salt Lakes in Qinghai Province based on System Dynamics Theory. Resour. Policy 2017, 52, 19–28. [Google Scholar] [CrossRef]
- Morillo, P.; Orduña, J.M.; Fernández, M.; García-Pereira, I. Comparison of WSN and IoT approaches for a real-time monitoring system of meal distribution trolleys: A case study. Future Gener. Comput. Syst. 2018, 87, 242–250. [Google Scholar] [CrossRef]
- Jiang, X.; Zhu, T.; Kodama, T.; Raghunathan, N.; Alexeenko, A.; Peroulis, D. Multi-Point Wireless Temperature Sensing System for Monitoring Pharmaceutical Lyophilization. Front. Chem. 2018, 6. [Google Scholar] [CrossRef] [PubMed]
- Shariff, F.; Rahim, N.A.; Hew, W.P. Zigbee-based data acquisition system for online monitoring of grid-connected photovoltaic system. Expert Syst. Appl. 2015, 42, 1730–1742. [Google Scholar] [CrossRef]
- Cerchecci, M.; Luti, F.; Mecocci, A.; Parrino, S.; Peruzzi, G.; Pozzebon, A. A low power IoT sensor node architecture for waste management within smart cities context. Sensors 2018, 18. [Google Scholar] [CrossRef] [PubMed]
- Suárez, J.I.; Arroyo, P.; Lozano, J.; Herrero, J.L.; Padilla, M. Bluetooth gas sensing module combined with smartphones for air quality monitoring. Chemosphere 2018, 205, 618–626. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; He, Y.; Li, B.; Shi, T. Transformer Fault Diagnosis Using Self-Powered RFID Sensor and Deep Learning Approach. IEEE Sens. J. 2018, 18, 6399–6411. [Google Scholar] [CrossRef]
- Ait Laasri, E.H.; Akhouayri, E.S.; Agliz, D.; Zonta, D.; Atmani, A. A fuzzy expert system for automatic seismic signal classification. Expert Syst. Appl. 2015, 42, 1013–1027. [Google Scholar] [CrossRef]
- Ivasic-Kos, M.; Ipsic, I.; Ribaric, S. A knowledge-based multi-layered image annotation system. Expert Syst. Appl. 2015, 42, 9539–9553. [Google Scholar] [CrossRef]
- Eesa, A.S.; Orman, Z.; Brifcani, A.M.A. A new feature selection model based on ID3 and bees algorithm for intrusion detection system. Turk. J. Electr. Eng. Comput. Sci. 2015, 23, 615–622. [Google Scholar] [CrossRef]
- Collotta, M.; Lo Bello, L.; Pau, G. A novel approach for dynamic traffic lights management based on Wireless Sensor Networks and multiple fuzzy logic controllers. Expert Syst. Appl. 2015, 42, 5403–5415. [Google Scholar] [CrossRef]
- Costea, C.R.; Silaghi, H.M.; Zmaranda, D.; Silaghi, M.A. Control System Architecture for a Cement Mill Based on Fuzzy Logic. Int. J. Comput. Commun. Control 2015, 10, 165–173. [Google Scholar] [CrossRef]
- Petrović, D.V.; Tanasijević, M.; Milić, V.; Lilić, N.; Stojadinović, S.; Svrkota, I. Risk assessment model of mining equipment failure based on fuzzy logic. Expert Syst. Appl. 2014, 41, 8157–8164. [Google Scholar] [CrossRef]
- Semtech SX1276/77/78/79 Datasheet. 2015, p. 132. Available online: http://www.mouser.com/ds/2/761/sx1276_77_78_79-1021978.pdf (accessed on 14 August 2018).
- STC MCU Limited. STC12C5A60S2 Series MCU STC12LE5A60S2 Series MCU Data Sheet. 2011. Available online: http://www.buydisplay.com/download/ic/STC12C5A60S2(STC12LE5A60S2)-ENG.pdf (accessed on 14 August 2018).
- Vangelista, L.; Zanella, A.; Zorzi, M. Long-range IoT technologies: The dawn of LoRaTM. Lect. Notes Inst. Comput. Sci. Soc. Telecommun. Eng. LNICST 2015, 159, 51–58. [Google Scholar] [CrossRef]
- Cetinkaya, O.; Akan, O.B. A DASH7-based power metering system. In Proceedings of the 2015 12th Annual IEEE Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2015; pp. 406–411. [Google Scholar] [CrossRef]
- Chen, Y.Y.; Wang, Y.J.; Jan, J.K. A novel deployment of smart cold chain system using 2G-RFID-Sys. J. Food Eng. 2014, 141, 113–121. [Google Scholar] [CrossRef]
- ElShafee, A.; Alaa Hamed, K. Design and implementation of a WiFi Based Home automation system. Int. J. Comput. Electr. Autom. Control Inf. Eng. 2012, 6, 1074–1080. [Google Scholar] [CrossRef]
- Mangalvedhe, N.; Ratasuk, R.; Ghosh, A. NB-IoT deployment study for low power wide area cellular IoT. In Proceedings of the 2016 IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–8 September 2016. [Google Scholar] [CrossRef]
- Bharati, P.; Chaudhury, A. An empirical investigation of decision-making satisfaction in web-based decision support systems. Decis. Support Syst. 2004, 37, 187–197. [Google Scholar] [CrossRef]
- Alalwan, J.A.; Thomas, M.A.; Weistroffer, H.R. Decision support capabilities of enterprise content management systems: An empirical investigation. Decis. Support Syst. 2014, 68, 39–48. [Google Scholar] [CrossRef]
- Khan, M.A.; Zeb, K.; Sathishkumar, P.; Ali, M.U.; Uddin, W.; Hussain, S.; Ishfaq, M.; Khan, I.; Cho, H.-G.; Kim, H.-J. A novel supercapacitor/lithium-ion hybrid energy system with a fuzzy logic-controlled fast charging and intelligent energy management system. Electronics 2018, 7, 63. [Google Scholar] [CrossRef]
- Singh, R.; Ngo, L.L.; Seng, H.S.; Mok, F.N.C. A silicon piezoresistive pressure sensor. In Proceedings of the First IEEE International Workshop on Electronic Design, Test and Applications, Christchurch, New Zealand, 29–31 January 2002; pp. 181–184. [Google Scholar] [CrossRef]
- Stornelli, V.; Ferri, G.; Leoni, A.; Pantoli, L. The assessment of wind conditions by means of hot wire sensors and a modifed Wheatstone bridge architecture. Sens. Actuators A Phys. 2017, 262, 130–139. [Google Scholar] [CrossRef]
- Yan, R.; Ma, Z.; Zhao, Y.; Kokogiannakis, G. A decision tree based data-driven diagnostic strategy for air handling units. Energy Build. 2016, 133, 37–45. [Google Scholar] [CrossRef]
- Sökmen, N.; Çebi, F. Decision-Tree Models for Predicting Time Performance in Software-Intensive Projects. Int. J. Inf. Technol. Proj. Manag. 2017, 8, 64–86. [Google Scholar] [CrossRef]
- Umano, M.; Okamoto, H.; Hatono, I.; Tamura, H.; Kawachi, F.; Umedzu, S.; Kinoshita, J. Fuzzy decision trees by fuzzy ID3 algorithm and its application to diagnosis systems. In Proceedings of the 1994 IEEE 3rd International Fuzzy Systems Conference, Orlando, FL, USA, 26–29 June 1994; pp. 2113–2118. [Google Scholar] [CrossRef]
- Wixted, A.J.; Kinnaird, P.; Larijani, H.; Tait, A.; Ahmadinia, A.; Strachan, N. Evaluation of LoRa and LoRaWAN for wireless sensor networks. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016; pp. 5–7. [Google Scholar] [CrossRef]
- Kim, D.H.; Lim, J.Y.; Kim, J.D. Low-power, long-range, high-data transmission using Wi-Fi and LoRa. In Proceedings of the 2016 6th International Conference on IT Convergence and Security (ICITCS), Prague, Czech Republic, 26 September 2016; pp. 1–3. [Google Scholar] [CrossRef]
- Zhang, C.; Fu, Y.; Deng, F.; Wei, B.; Wu, X. Methane Gas Density Monitoring and Predicting Based on RFID Sensor Tag and CNN Algorithm. Electronics 2018, 7, 69. [Google Scholar] [CrossRef]
- Aref, M.; Sikora, A. Free space range measurements with Semtech LoRaTM technology. In Proceedings of the 2014 2nd International Symposium on Wireless Systems within the Conferences on Intelligent Data Acquisition and Advanced Computing Systems, Offenburg, Germany, 11–12 September 2014; p. 19. [Google Scholar] [CrossRef]
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W. A Study of LoRa: Long Range & Low Power Networks for the Internet of Things. Sensors 2016, 16, 1466. [Google Scholar] [CrossRef]
- Li, J.; Xie, J.; Yang, Z.; Li, J. Fault Diagnosis Method for a Mine Hoist in the Internet of Things Environment. Sensors 2018, 18, 1920. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Wang, F.; Zeng, Z. Design and Implementation of Indoor Environmental Quality Monitoring System based on ZigBee. In Proceedings of the International Conference on Computer Information Systems and Industrial Applications, Bangkok, Thailand, 28–29 June 2015; pp. 297–300. [Google Scholar] [CrossRef]
- Casari, P.; Castellani, A.P.; Cenedese, A.; Lora, C.; Rossi, M.; Schenato, L.; Zorzi, M. The “Wireless Sensor networks for city-Wide Ambient Intelligence (WISE-WAI)” project. Sensors 2009, 9, 4056–4082. [Google Scholar] [CrossRef] [PubMed]
- Tran, A.T.; Mai, D.D.; Kim, M.K. Link Quality Estimation in Static Wireless Networks with High Traffic Load. J. Commun. Netw. 2015, 17, 370–383. [Google Scholar] [CrossRef]
- Baccour, N.; Koubâa, A.; Mottola, L.; Zúñiga, M.A.; Youssef, H.; Boano, C.A.; Alves, M. Radio link quality estimation in wireless sensor networks. ACM Trans. Sens. Netw. 2012, 8, 34. [Google Scholar] [CrossRef]
- Petäjäjärvi, J.; Mikhaylov, K.; Yasmin, R.; Hämäläinen, M.; Iinatti, J. Evaluation of LoRa LPWAN Technology for Indoor Remote Health and Wellbeing Monitoring. Int. J. Wirel. Inf. Netw. 2017, 24, 153–165. [Google Scholar] [CrossRef]
- Nolan, K.E.; Guibene, W.; Kelly, M.Y. An evaluation of low power wide area network technologies for the Internet of Things. In Proceedings of the Paphos, Cyprus, 5–9 September 2016; pp. 439–444. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application | Wireless-Tech | Distance | Advantage | Disadvantage | Literature |
|---|---|---|---|---|---|
| Meal distribution trolleys | WSN * + IOT *: IEEE * 802.15.4 | <100 m | Real-Time, Compared WSN and IoT | Temperature only | [4] |
| Pharmaceutical Lyophilization | RF *: nRF52832 | <1 m | Multi-point sensors’ measurement | Close range transmission | [5] |
| Grid-connected photovoltaic | Zigbee: SKXBEE | 10~75 m | Web-based | Robustness of the system | [6] |
| Waste Management | LoRa LPWAN *: SX1272 | >1000 m | Energy efficient solution | Power consumption | [7] |
| Air quality | Bluetooth: RN42VX | <10 m | Miniaturized gas-sensing | Close range transmission | [8] |
| Transformer Fault Diagnosis | RFID *: VISN-V3 | <100 m | Stacked denoising autoencoder | Close range transmission | [9] |
| Methods | Application | Advantage | Disadvantage | Literature Studies |
|---|---|---|---|---|
| A fuzzy rule-based expert classification system | Automatic classification of seismic events | Making the classifier more transparent and adjustable | The multi-parameter optimization problem | [10] |
| A fuzzy knowledge-based intelligent system | Automatic image annotation | Enriched with new, more general and abstract concepts | Cannot be immediately used for new applications or domains | [11] |
| A selection model based on ID3 * and bees algorithm | Intrusion detection system | Higher values of DR * and AR * and lower values of FAR * | Searching the most efficient possible location | [12] |
| Multiple fuzzy logic controllers | Dynamic traffic lights management | Better performance, fault-tolerance | The WSN * node power consumption | [13] |
| A system architecture based on fuzzy logic | Cement milling | Changing within range: 40–60% | Only simulated using a MATLAB-Simulink | [14] |
| The fuzzy logic theory and traditional RPN * application | Mining equipment failure | The possibility to operate imprecise and insufficient data | Replacement time and downtime of the conveyor | [15] |
| Existing Problems | Future System Requirements | Hierarchy of Needs |
|---|---|---|
| The manual inspection method is used to monitor the dynamic information of the brine pump, which has low efficiency and high human cost. | Automatic collection of dynamic information for the brine wells. | Information acquisition |
| Brine pumps are large in number (more than 300) and scattered in distribution (the distance between pumps is about 500 m), the desert environment is sandy, there is strong sun exposure and big diurnal temperature difference, and so the implementation of traditional monitoring methods is difficult. | Combined with long-range wireless communication technology to achieve acquisition and transmission of dynamic information. | Information transmission |
| There is no management information system to manage the data produced during the operation of the brine pumps and the production process of the chemical enterprises. The enterprise records the data by manual means, and it is easy to lead to errors due to the large amount of data and non-standard data. | Design and development decision support system to realize the management and maintenance of data such as static information, dynamic monitoring data of the brine pump, fault repair and mining status of the mining area. | Information management |
| There is no decision model to judge the operation status of brine equipment meaning users cannot identify and predict brine pump operating status. | The voltage, current and brine level of the equipment can be intelligently analyzed, which provides decision support for the analysis and judgment of the brine pump. | Data mining and decision support |
| As there are large distances, when the brine equipment fails maintenance workers cannot rush to the scene troubleshooting but can only rely on manual inspection periodically. | Using remote-control technology, through the mobile phone or Web browser to realize remote control of a pumping station and brine equipment. | Remote control |
| Measurement Method | Species | Range | Accuracy | Beam Angle | Brine Level Calculation Method |
|---|---|---|---|---|---|
| Non-contact | Laser sensor | 0–30 m | ±3 mm | — | |
| Radar sensor | 1.5–40 m | ±1 mm | 4° | ||
| Ultrasonic sensors | 0.9–40 m | ±1 mm | 6° | ||
| Contact | Pressure Sensor | 0–50 m | 2 cm | — |
| Parameter | Minimum Settings | Recommended Settings | SX1278 | Match |
|---|---|---|---|---|
| Range | 600 m(Rural) | 1000 m (Rural) | 15,000 m (Rural) | √ |
| Data Rate | 2 kbps | 10 kpbs | 0.3–37.5 kbps | √ |
| Band | 433 MHz | 433 MHz | 433 MHz | √ |
| Payload Length | 12 bytes | 16 bytes | 64 bytes | √ |
| AES 128 bits | AES decryption in software | Secure Element 2 | AES decryption in software | √ |
| Parameter | Minimum Settings | Recommended Settings | STC12C5A60S2 | Match |
|---|---|---|---|---|
| MCU * RAM * | 8 KB | 16 KB | 16 K (Expandable) | √ |
| MCU Flash | 128 KB | 256 KB | 128 KB (Expandable) | √ |
| AES * 128 bits | AES decryption in software | Secure Element 2 | AES decryption in software | √ |
| Radio DIO *s connected to MCU IRQ * inputs | DIO0, DIO1, DIO2 | DIO0, DIO1, DIO2, DIO3 | DIO0, DIO1, DIO2 | √ |
| SPI * (4 wires: SCK *, MOSI *, MISO *, NSS *) | Mandatory | √ | ||
| RTC * (32.768 kHz XTAL *) | Recommended for accurate time keeping | Mandatory for Class B nodes and FUODA * | Recommended for accurate time keeping | √ |
| IEEE * EUI *-64 (OUI *: 24 or 30 bits, SN *: 40 or 34 bits) | Mandatory | √ | ||
| Category | Calculation Formula | Description |
|---|---|---|
| Information entropy (unconditional entropy) | The information entropy reflects the uncertainty of category attribute C | |
| Conditional entropy | The conditional entropy represents the classification ability of the category attribute C for the training data set S in the case of the known description attribute | |
| Mutual information (information gain) | Mutual information is used to measure the extent to which attribute attributes are reduced |
| Attribute Value | Description Attribute | Category Attribute | ||
|---|---|---|---|---|
| No. | Current | Voltage | Brine Level | Failure |
| 1 | Low | Medium | Low | P |
| 2 | Low | Medium | Medium | N |
| 3 | Low | Medium | High | N |
| 4 | Low | High | Medium | N |
| 5 | Medium | Low | Low | P |
| 6 | Medium | Low | Medium | P |
| 7 | Medium | Medium | Low | P |
| 8 | Medium | Medium | High | N |
| 9 | Medium | High | Low | P |
| 10 | Medium | High | Medium | N |
| 11 | High | Low | Low | P |
| 12 | High | Low | High | P |
| 13 | High | Medium | Medium | P |
| 14 | High | Medium | High | P |
| No. | Antecedent of Rules | Consequent of Rules |
|---|---|---|
| 1 | IF the Current is “low” AND the Brine level is “low” | THEN the failure is “P” |
| 2 | IF the Current is “low” AND the Brine level is “medium” | THEN the failure is “N” |
| 3 | IF the Current is “low” AND the Brine level is “high” | THEN the failure is “N” |
| 4 | IF the Current is “medium” AND the Brine level is “low” | THEN the failure is “P” |
| 5 | IF the Current is “medium” AND the Brine level is “high” | THEN the failure is “N” |
| 6 | IF Current = “high” | THEN the failure is “P” |
| Function | Before the Project | After the Project |
|---|---|---|
| Voltage monitoring | Manual inspection | Automated monitoring |
| Current monitoring | Manual inspection | Automated monitoring |
| Brine level monitoring | Manual inspection | Automated monitoring |
| Static information management | Paper record and manual input | management information service |
| Fault discrimination | Manual inspection | Decision support |
| Fault warning | Null | Real-time warning |
| Fault response | Manual inspection | Remote control |
| Date | Total Number of Failures | Causes of Failure and Number of Faults | Repair Results |
|---|---|---|---|
| 25 July 2016–24 August 2016 | 12 | No-load: 5 Electric leakage: 1 Impeller crystallization: 5 Non-full-phase: 1 | Repair: 8 Burn out: 4 |
| 25 August 2016–24 September 2016 | 13 | No-load: 5 low voltage: 4 Impeller crystallization: 4 | Repair: 9 Burn out: 4 |
| 25 September 2016–24 October 2016 | 12 | No-load: 6 Non-full-phase: 1 Impeller crystallization: 5 | Repair: 7 Burn out: 5 |
| 25 July 2017–24 August 2017 | 6 | No-load: 2 Impeller crystallization: 2 low voltage: 2 | Repair: 4 Burn out: 2 |
| 25 August 2017–24 September 2017 | 7 | No-load: 3 Impeller crystallization: 1 Electric leakage: 2 Non-full-phase: 1 | Repair: 4 Burn out: 3 |
| 25 September 2017–24 October 2017 | 6 | No-load: 2 Impeller crystallization: 3 Non-full-phase: 1 | Repair: 4 Burn out: 2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, Y.; Liu, H.; Zhang, M.; Stankovski, S.; Feng, J.; Zhang, X. Improving Intelligence and Efficiency of Salt Lake Production by Applying a Decision Support System Based on IOT for Brine Pump Management. Electronics 2018, 7, 147. https://doi.org/10.3390/electronics7080147
Cui Y, Liu H, Zhang M, Stankovski S, Feng J, Zhang X. Improving Intelligence and Efficiency of Salt Lake Production by Applying a Decision Support System Based on IOT for Brine Pump Management. Electronics. 2018; 7(8):147. https://doi.org/10.3390/electronics7080147
Chicago/Turabian StyleCui, Yan, He Liu, Mengjie Zhang, Stevan Stankovski, Jianying Feng, and Xiaoshuan Zhang. 2018. "Improving Intelligence and Efficiency of Salt Lake Production by Applying a Decision Support System Based on IOT for Brine Pump Management" Electronics 7, no. 8: 147. https://doi.org/10.3390/electronics7080147
APA StyleCui, Y., Liu, H., Zhang, M., Stankovski, S., Feng, J., & Zhang, X. (2018). Improving Intelligence and Efficiency of Salt Lake Production by Applying a Decision Support System Based on IOT for Brine Pump Management. Electronics, 7(8), 147. https://doi.org/10.3390/electronics7080147