Adhesion Control Strategy Based on the Wheel-Rail Adhesion State Observation for High-Speed Trains


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Model Analysis
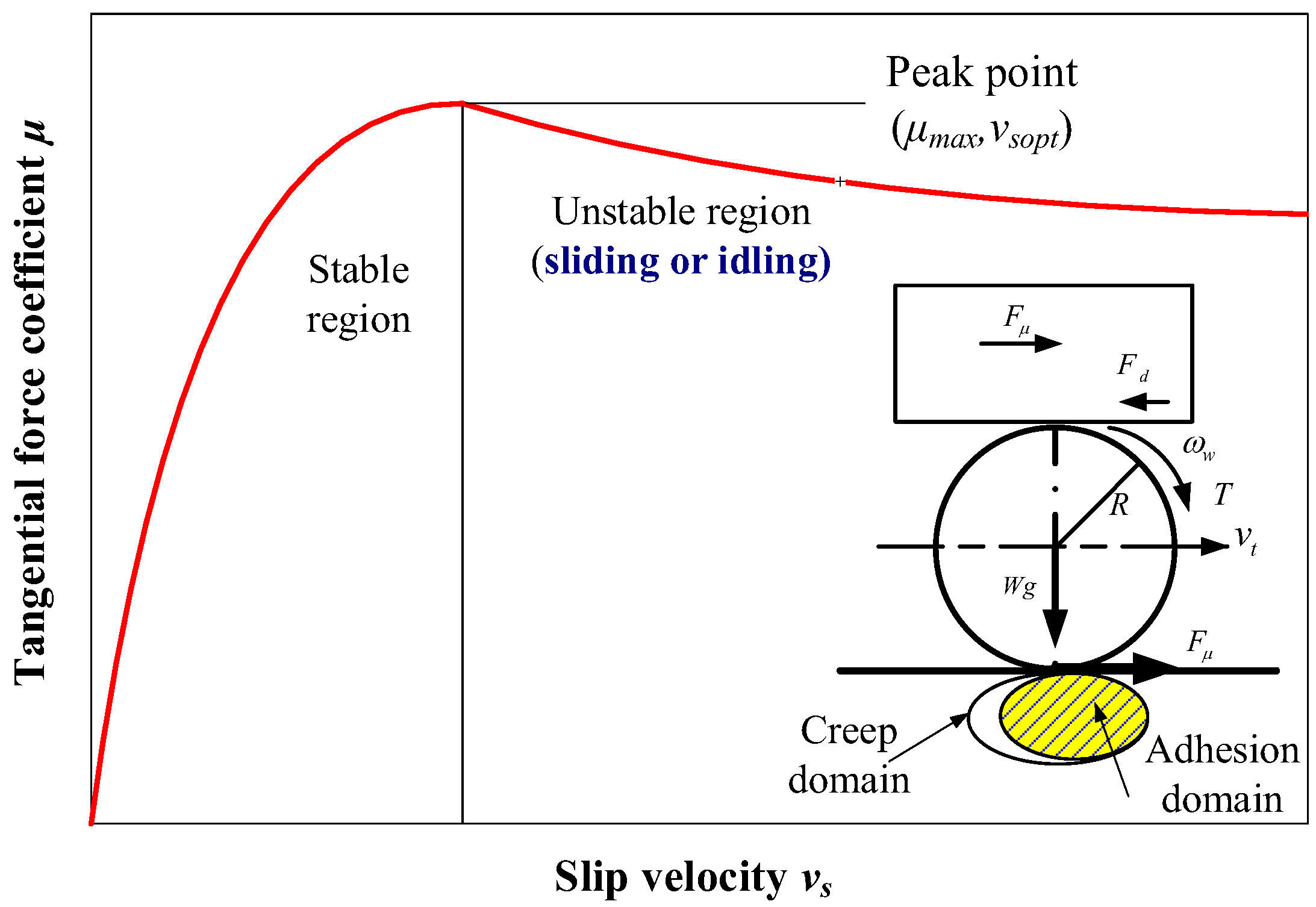
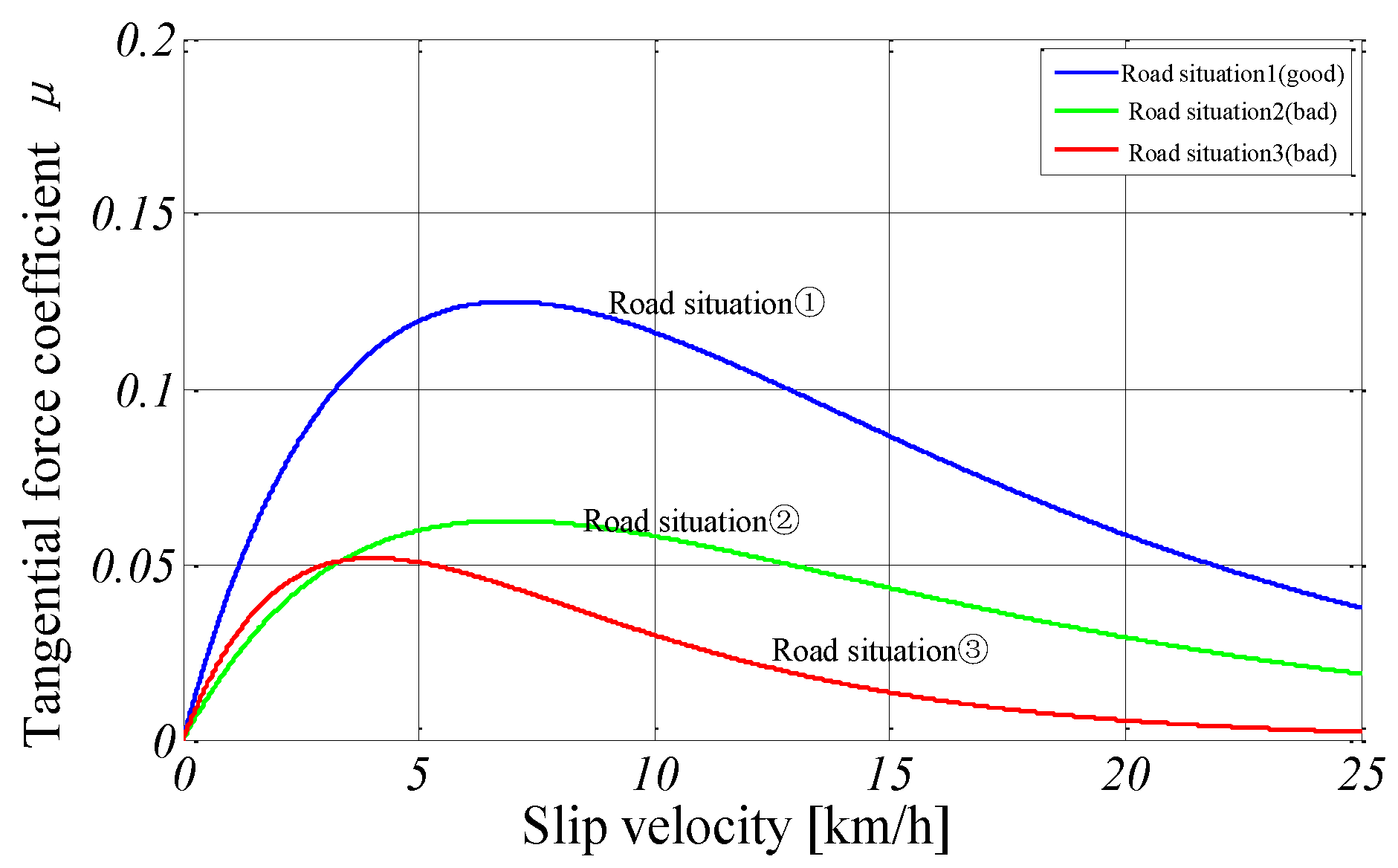
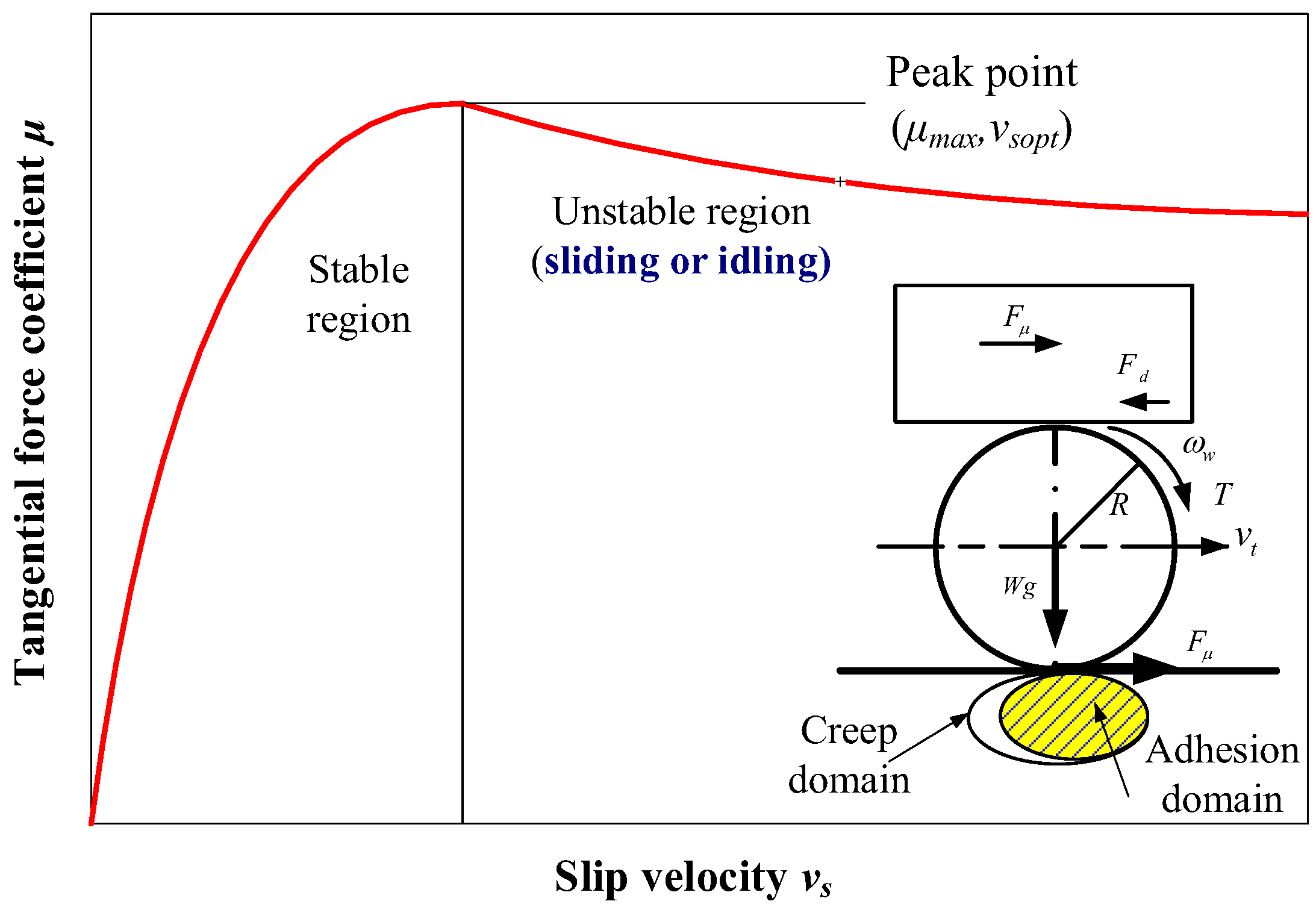
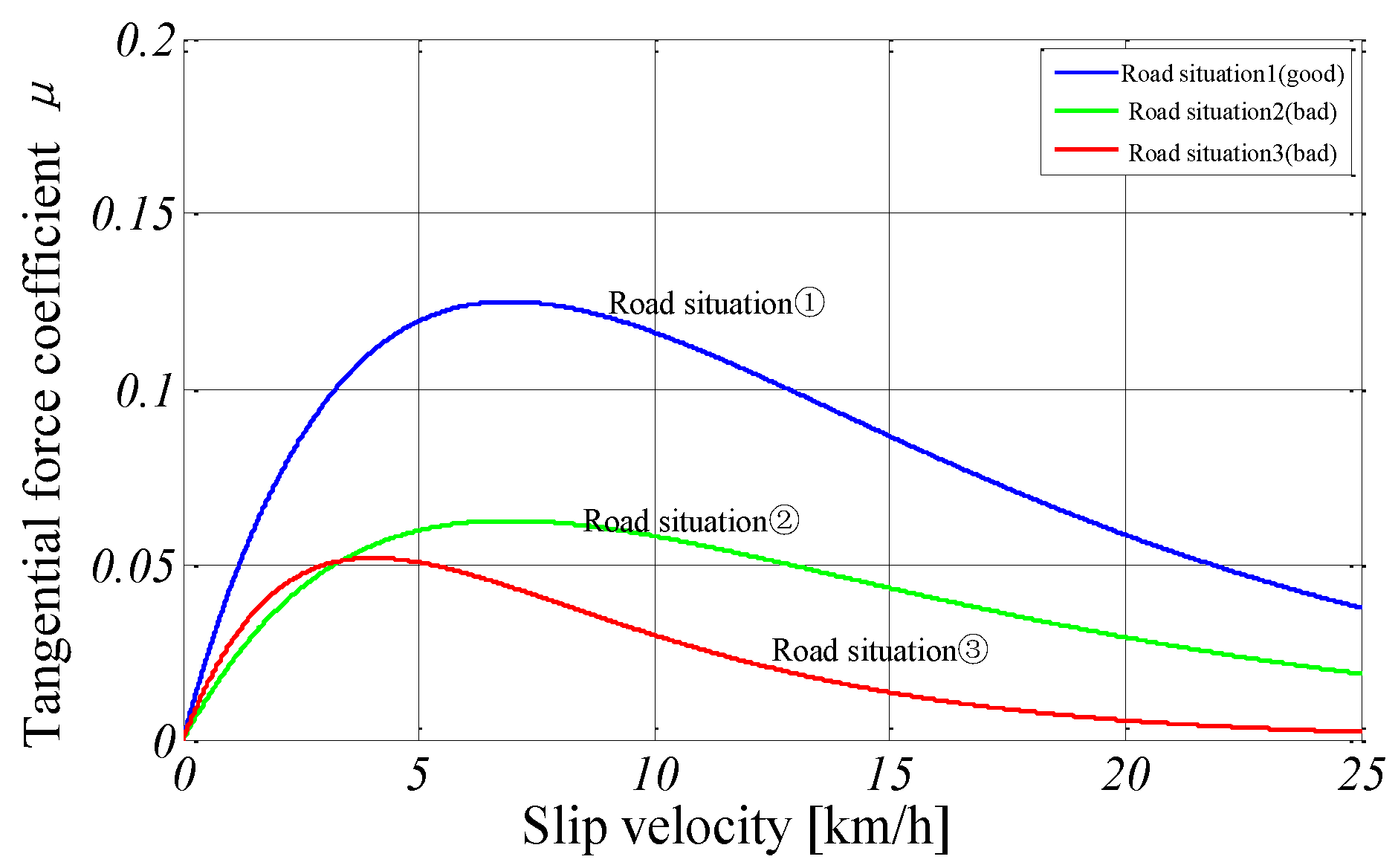
2.1. Adhesion-Slip Characteristic
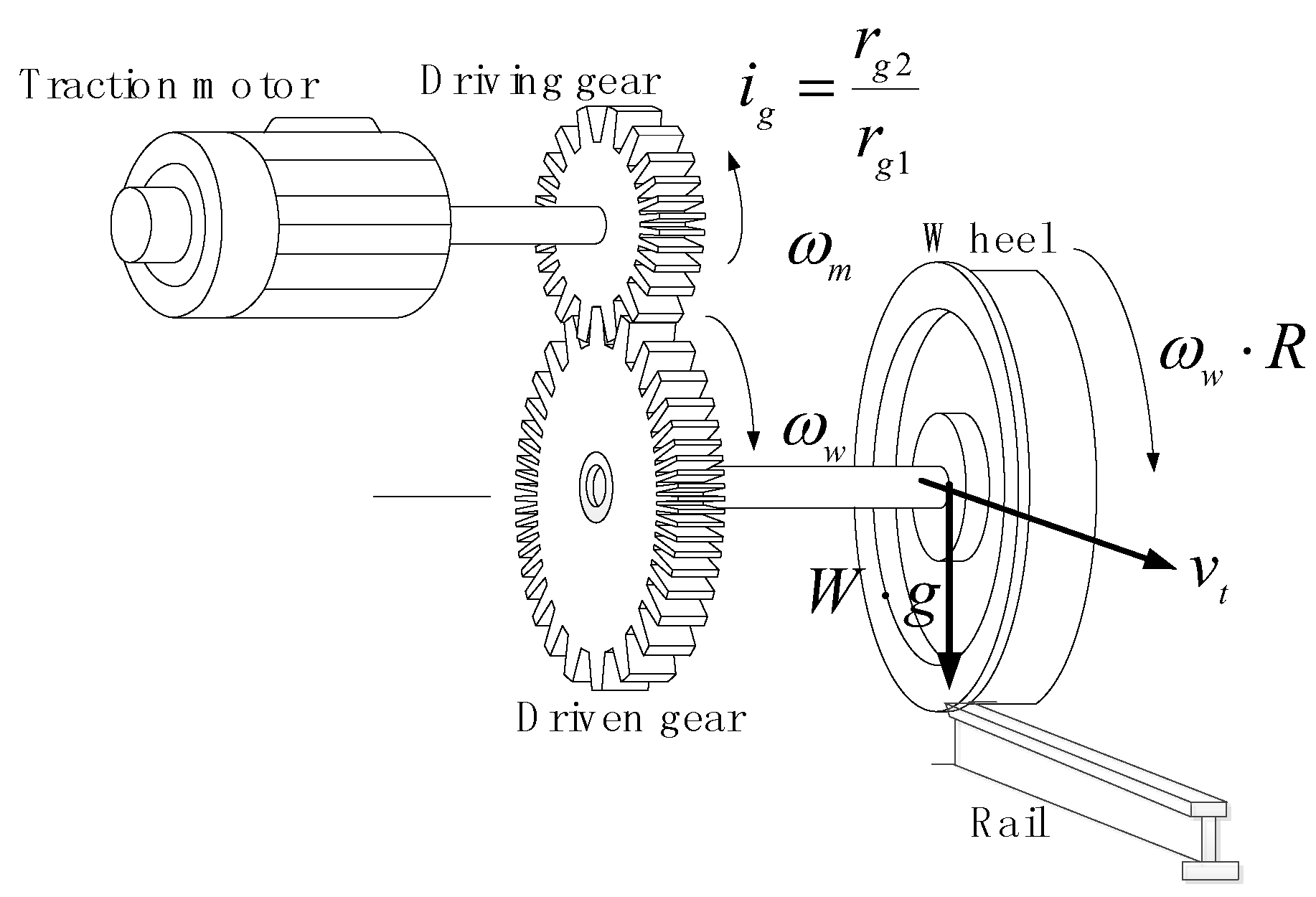
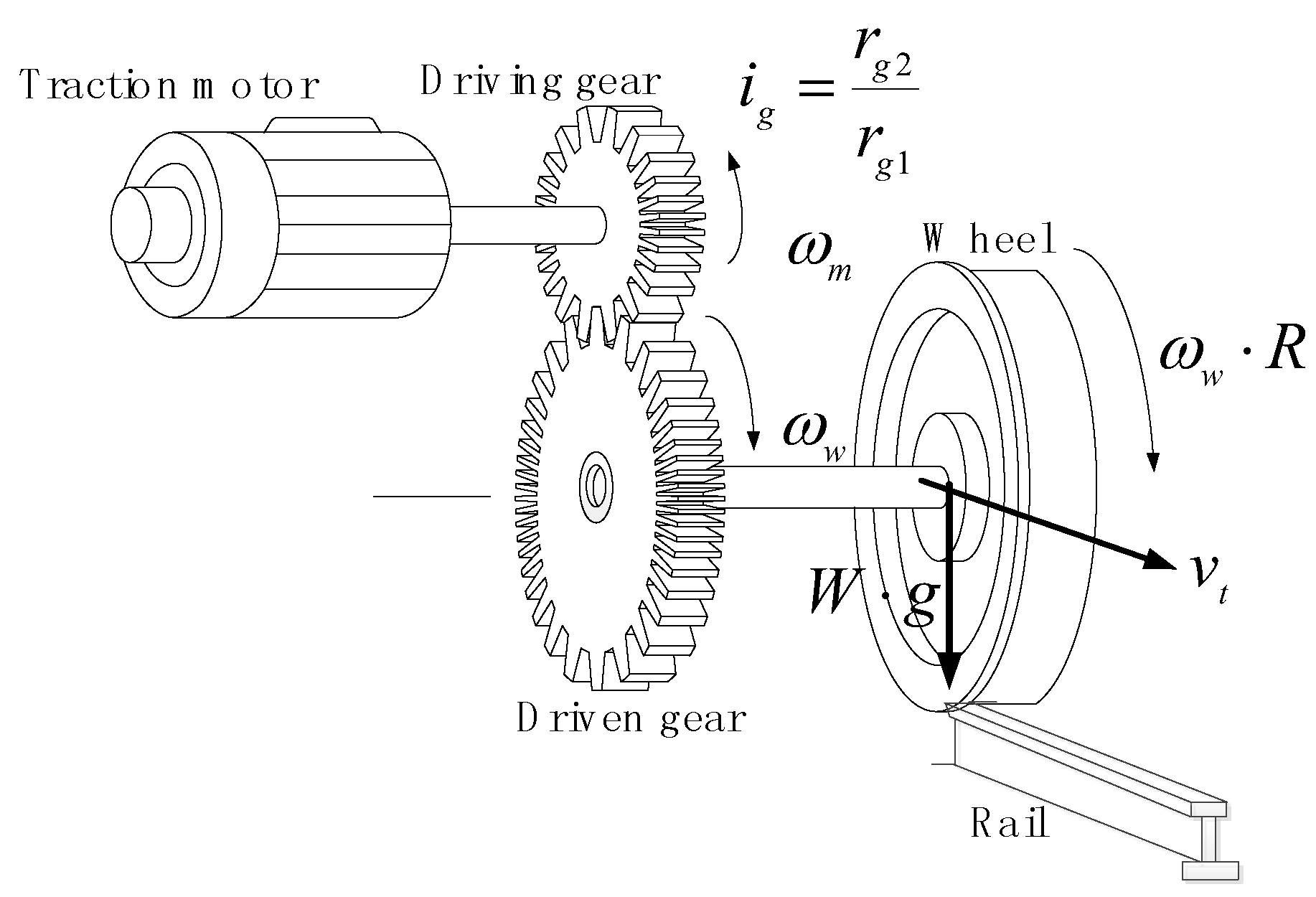
2.2. Train Single Axle Dynamics Model
3. The Modified Adhesion Control Method
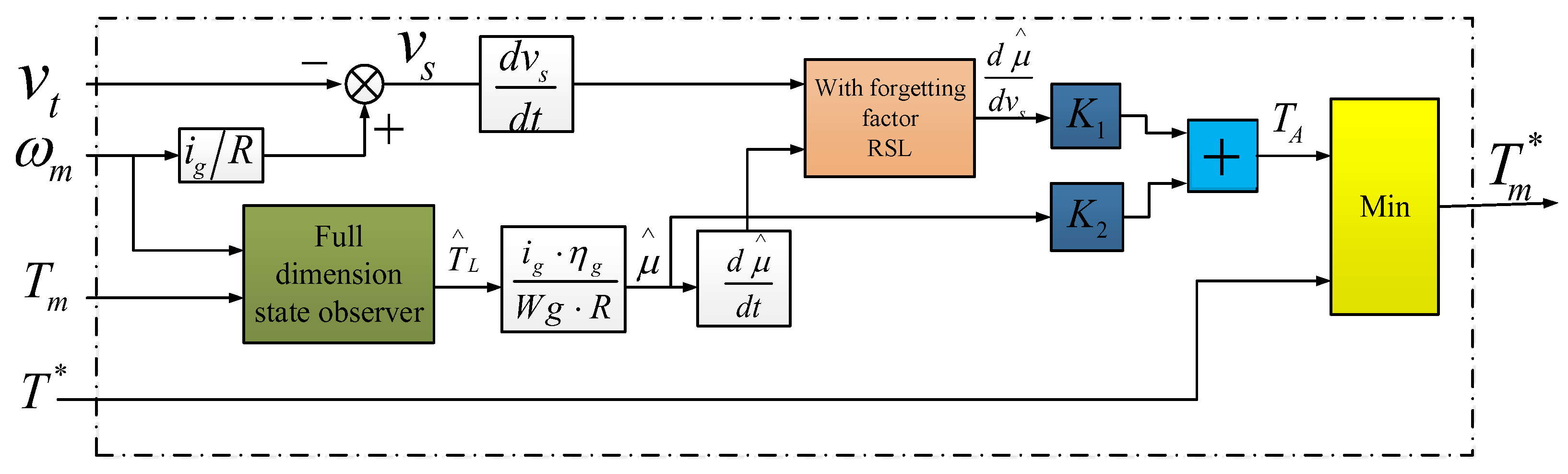
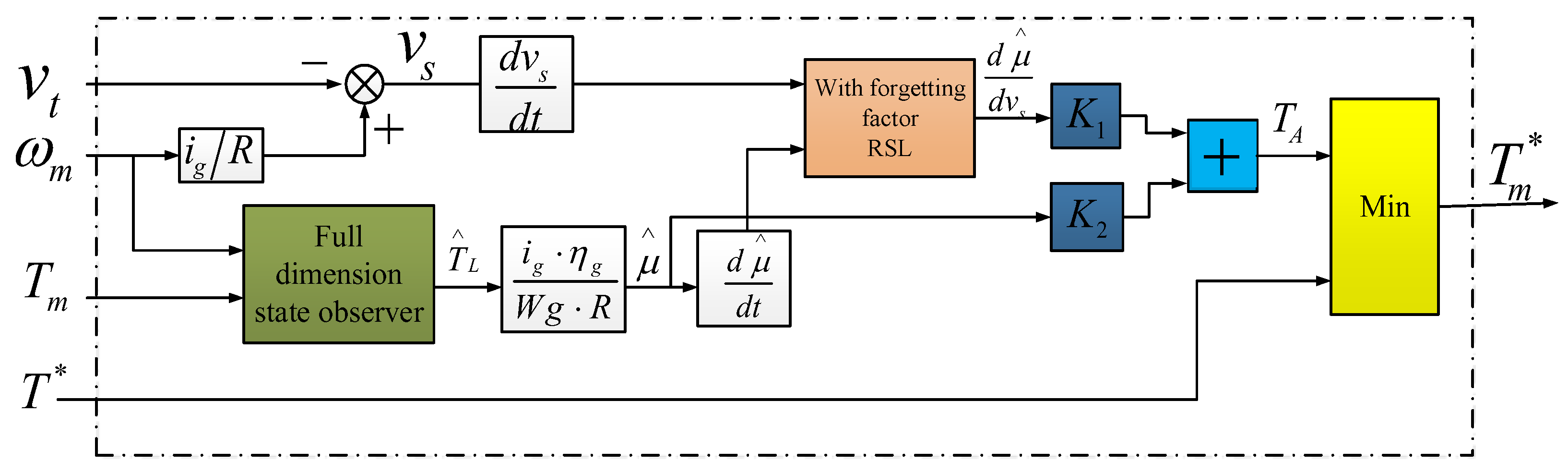
3.1. Method Implementation Principle
3.2. Theoretical Analysis and Parameter Setting of the Control Method
4. Experimental Verification
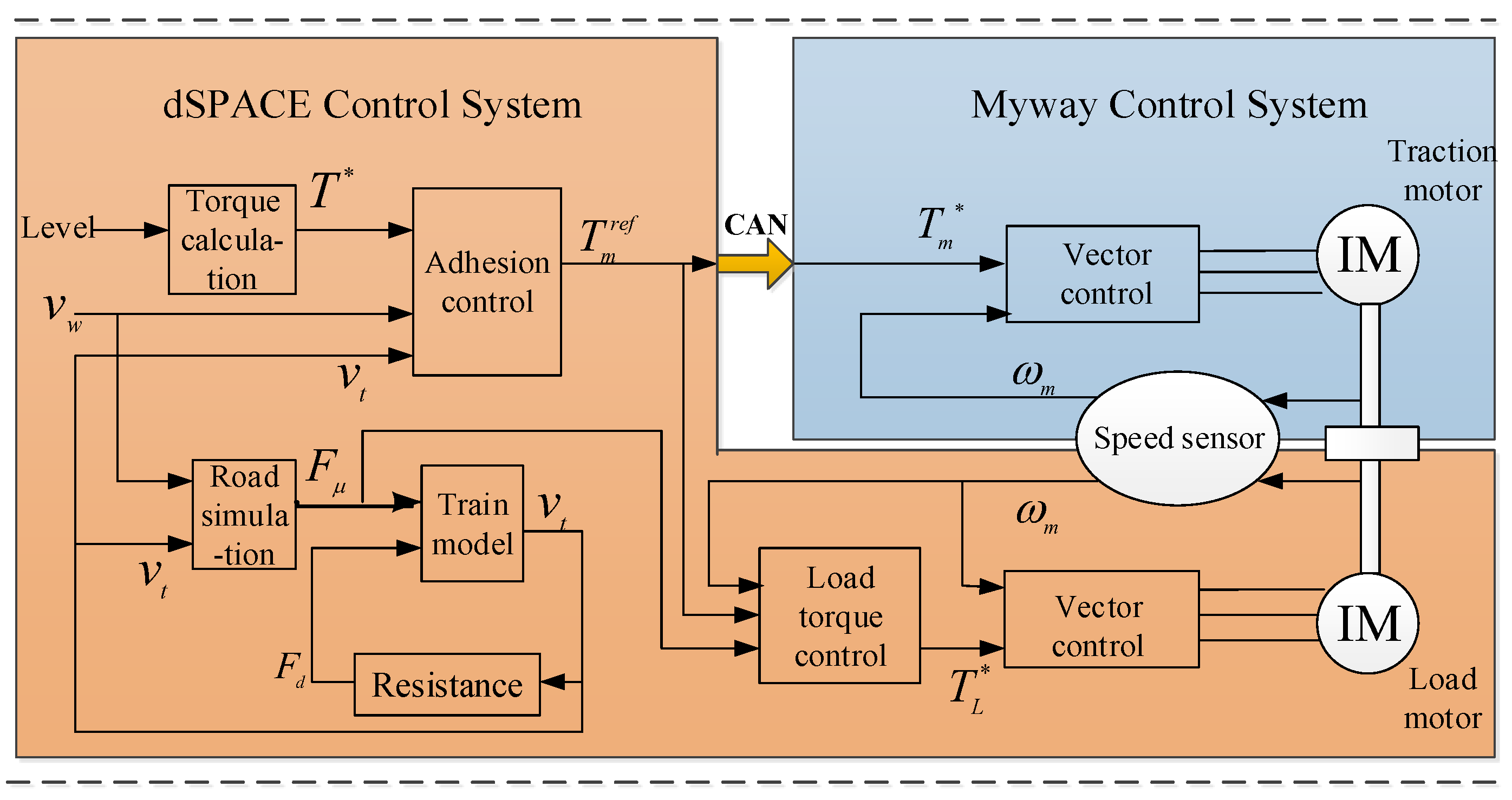
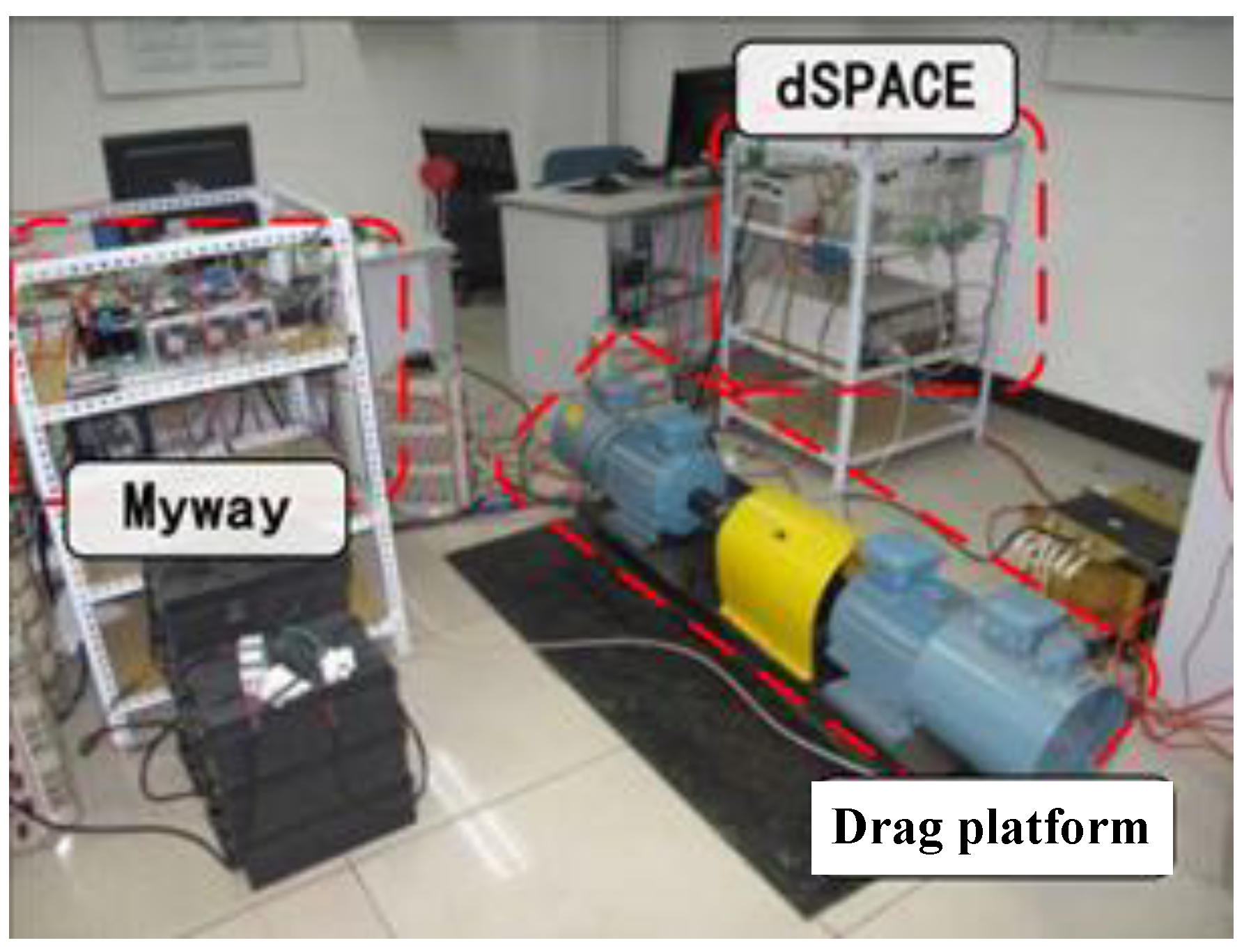
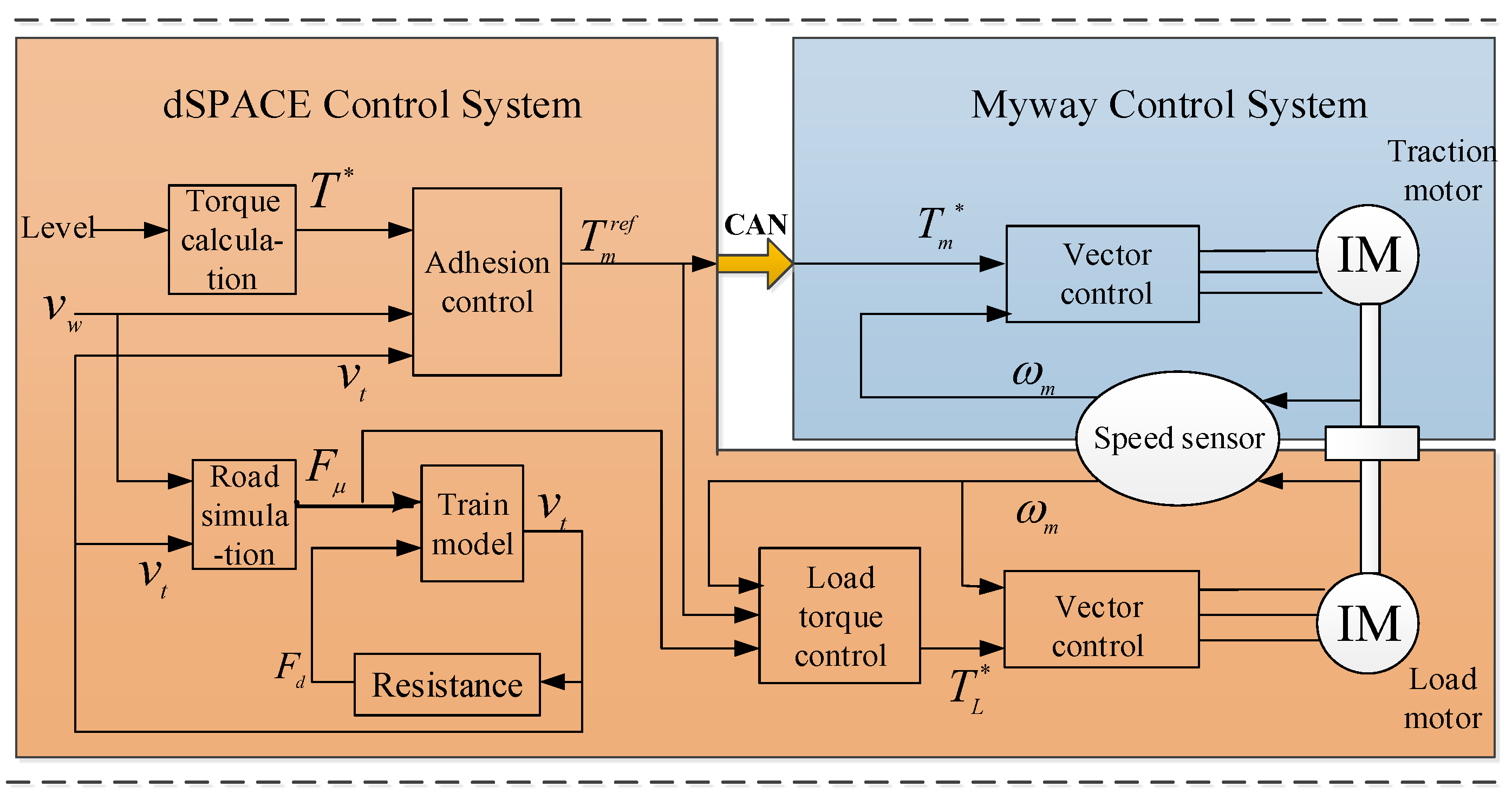
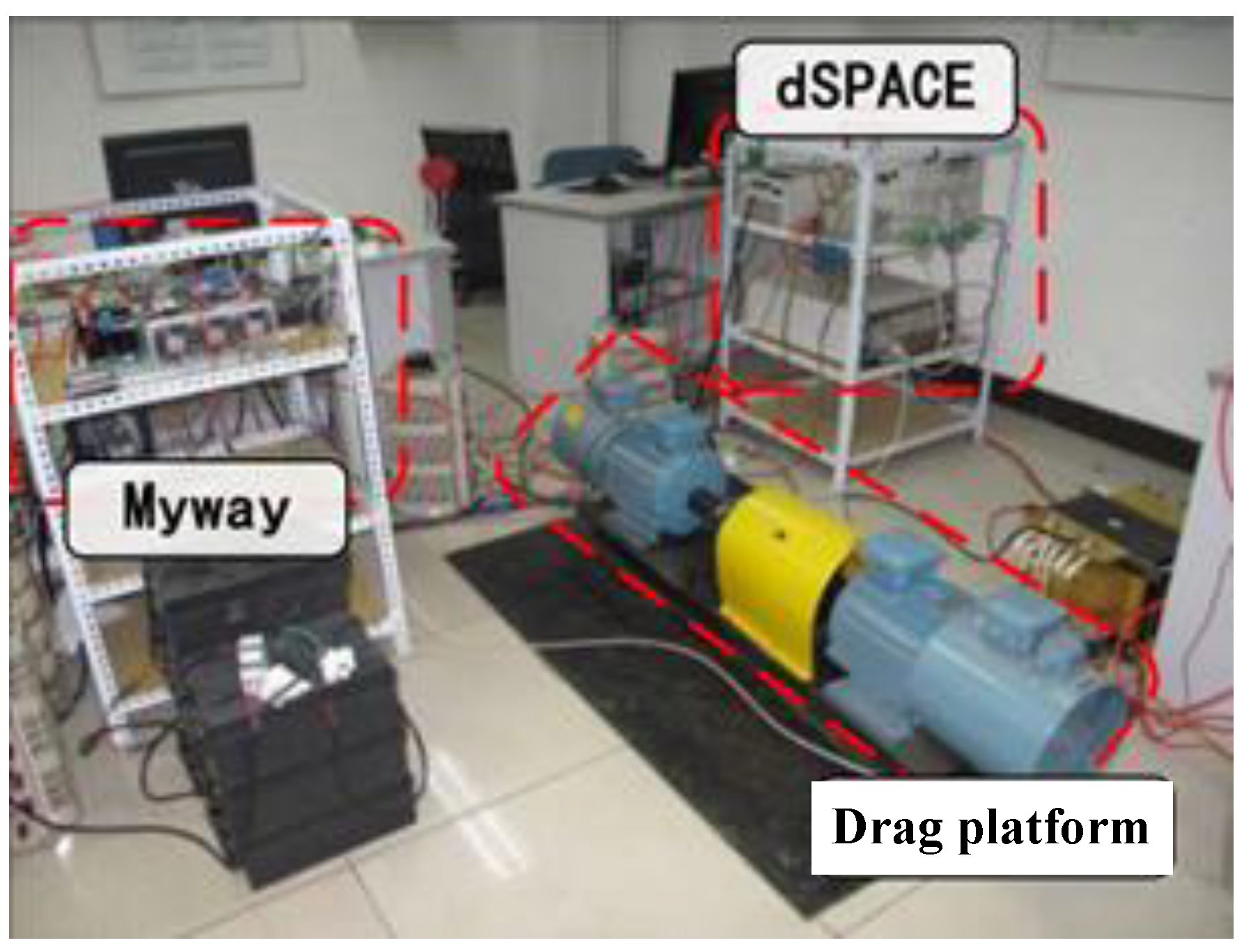
4.1. The Load Simulation Test Platform Introduction
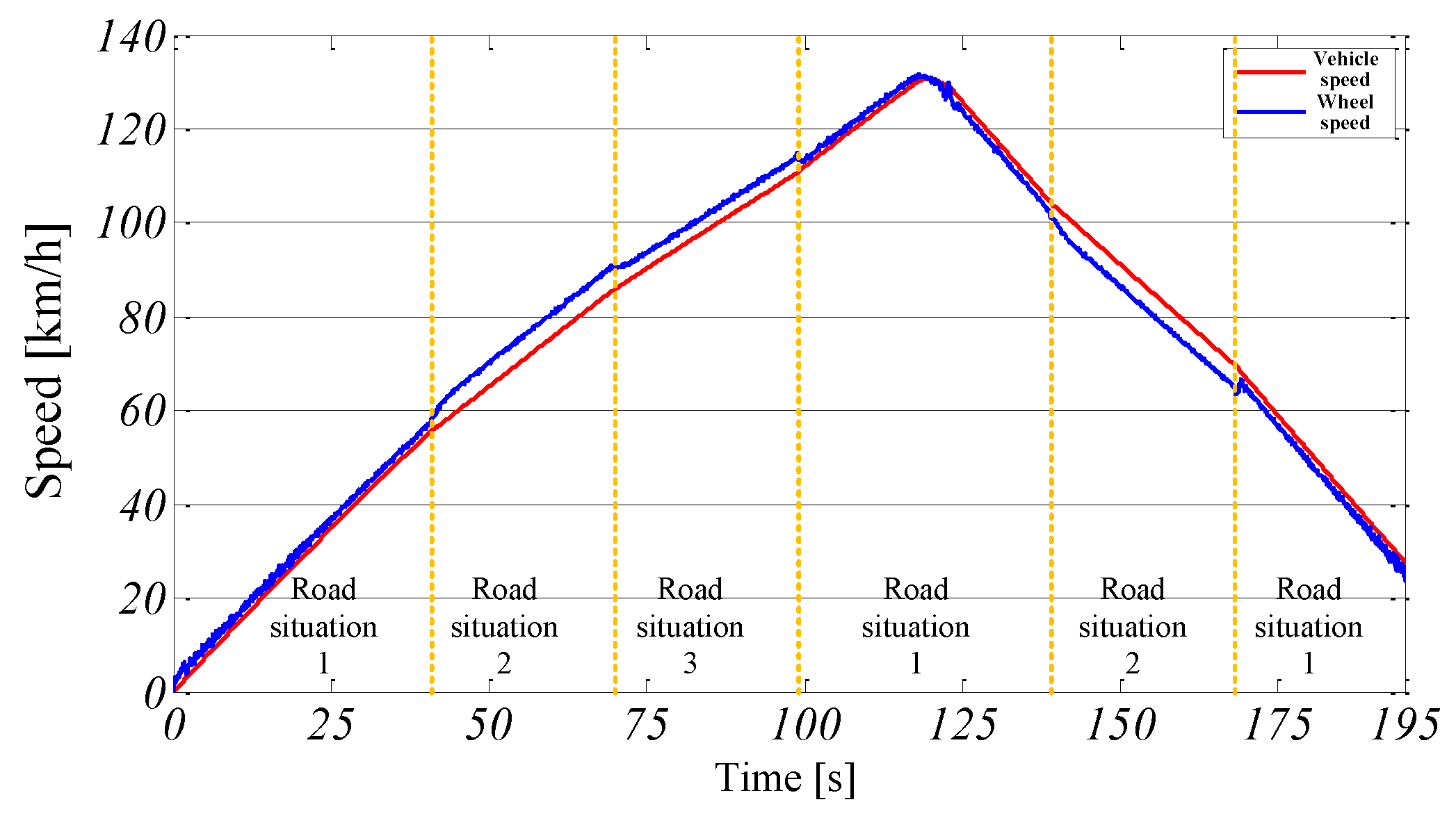
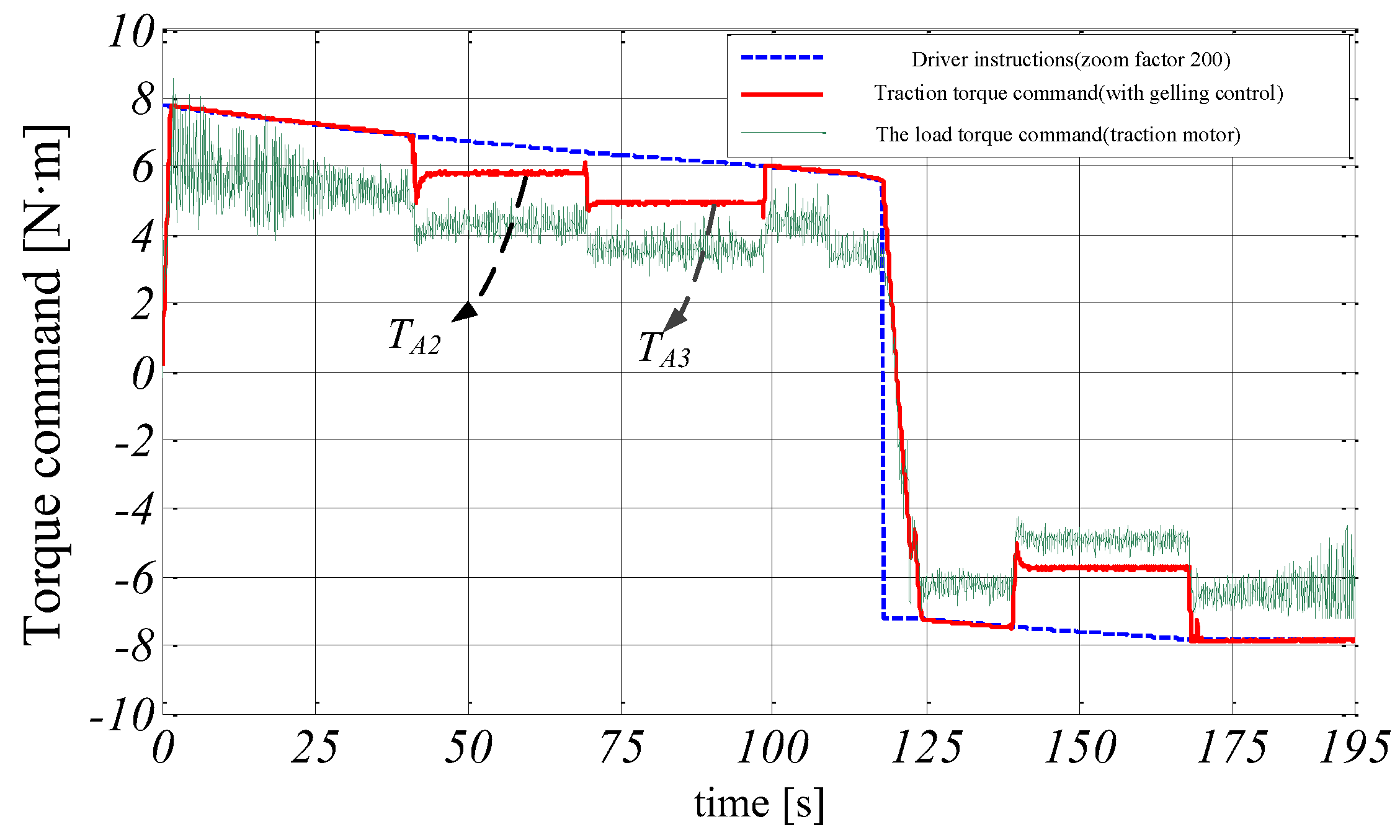
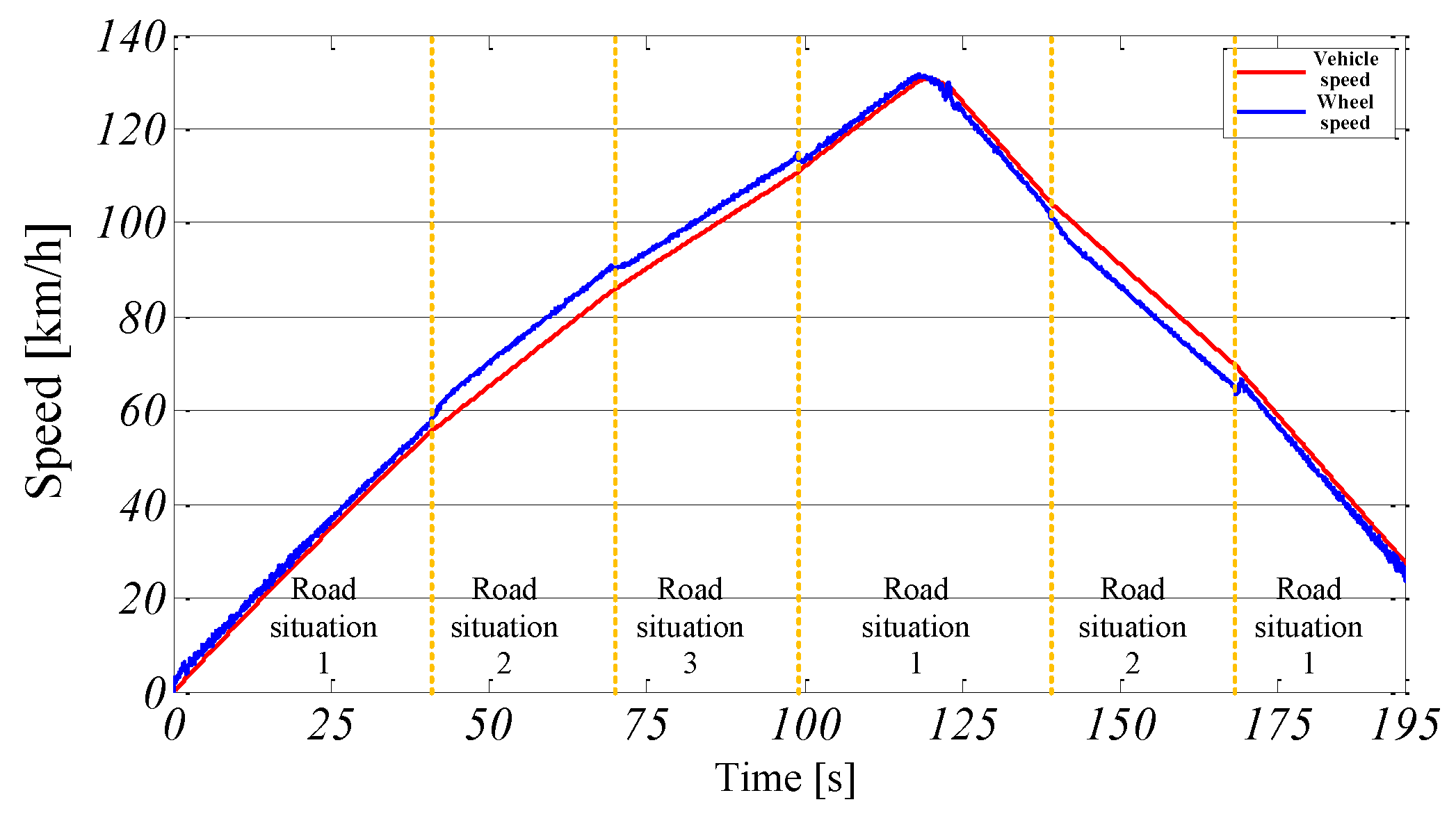
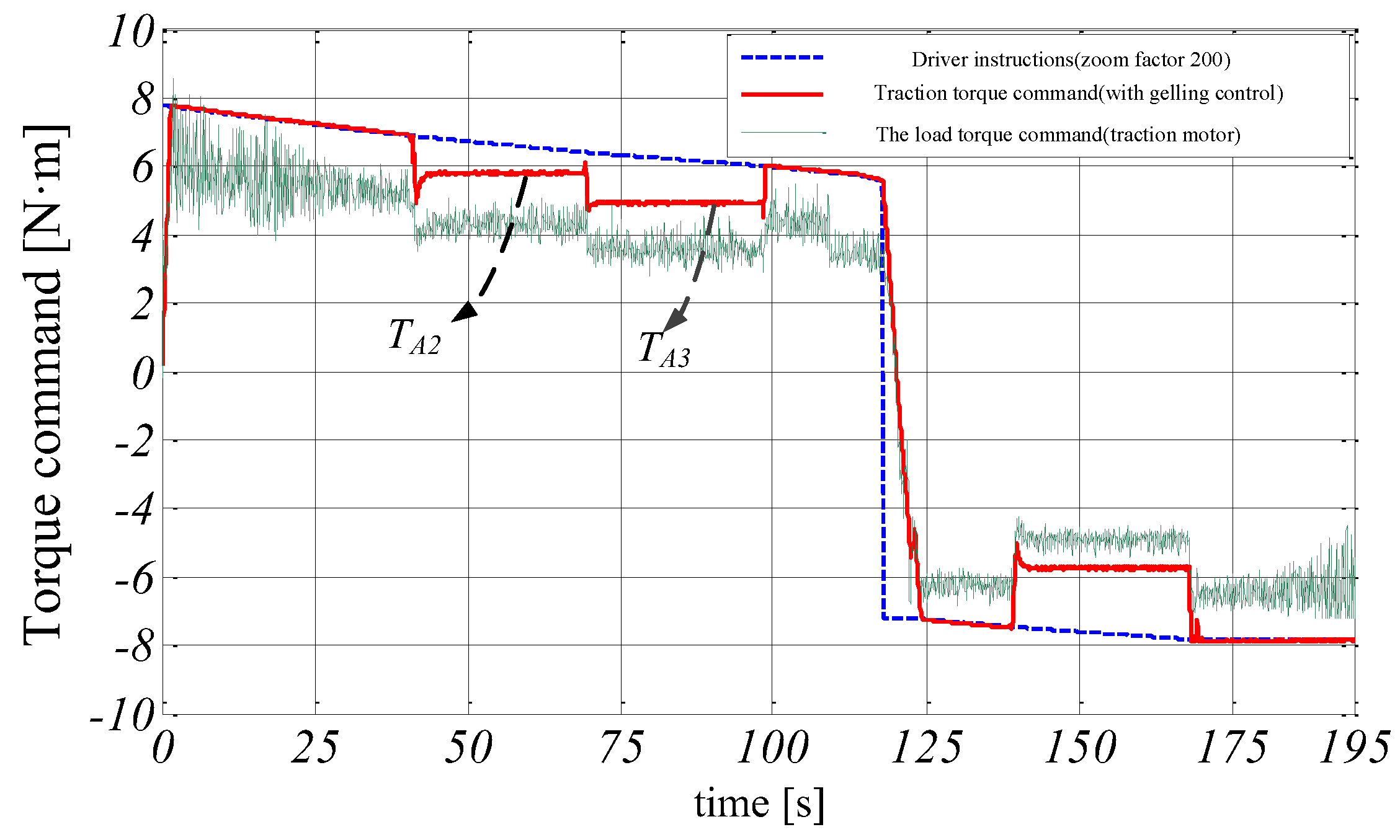
4.2. Experimental Results and Analysis
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Ma, J.L.J.; Peng, H. Basic principle and methods of adhesion control of locomotive. Electr. Drive Locomot. 2002, 6, 4–8. [Google Scholar]
- Kadowaki, S.; Ohishi, K.; Miyashita, I.; Yasukawa, S. Re-adhesion control of electric motor coach based on disturbance observer and sensor-less vector control. In Proceedings of the Power Conversion Conference 2002 (PCC-Osaka 2002), Osaka, Japan, 2–5 April 2002; pp. 1020–1025. [Google Scholar]
- Kadowaki, S.; Ohishi, K.; Hata, T.; Iida, N.; Takagi, M.; Sano, T.; Yasukawa, S. Antislip readhesion control based on speed-sensorless vector control and disturbance observer for electric commuter train—Series 205–5000 of the east japan railway company. IEEE Trans. Ind. Electron. 2007, 54, 2001–2008. [Google Scholar] [CrossRef]
- Kwon, S.; Huh, U.; Kim, H.; Kim, J. Re-adhesion Control with Estimated Adhesion Force Coefficient for Wheeled Robot using Fuzzy Logic. In Proceedings of the 30th Annual Conference of IEEE Industrial Electronics Society 2004 (IECON 2004), Busan, Korea, 2–6 November 2004; pp. 2530–2535. [Google Scholar]
- Spiryagin, M.; Lee, K.; Hong, H. Control system for maximum use of adhesive forces of a railway vehicle in a tractive mode. Mech. Syst. Signal Process. 2008, 22, 709–720. [Google Scholar] [CrossRef]
- Chen, Z.; Zeng, J.; Luo, R. Traction adhesion control and simulation for railway train. Mod. Manuf. Eng. 2009, 6, 8–12. [Google Scholar]
- Lin, W.; Zhao, L.; Dong, K. Performance Analysis of Re-adhesion Optimization Control Based on Full-dimension State Observer. Proced. Eng. 2011, 23, 531–536. [Google Scholar]
- Ohishi, K.; Nakano, K.; Miyashita, I.; Yasukawa, S. Anti-Slip Control of Electric Motor Coach Based on Disturbance observer. In Proceedings of the 1998 5th International Workshop on Advanced Motion Control (AMC’98-Coimbra), Coimbra, Portugal, 29 June–1 July 1998; pp. 580–585. [Google Scholar]
- Ohishi, K.; Nakano, K.; Miyashita, I.; Yasukawa, S. Anti-slip Re-adhesion Control of Electric Motor Coach Based on Force Control using Disturbance Observer. In Proceedings of the 2000 IEEE Industry Applications Conference, Rome, Italy, 8–12 October 2000; pp. 1001–1007. [Google Scholar]
- Verhille, J.; Bouscayrol, A.; Barre, P.; Mercieca, J.; Hautier, J.; Semail, E. Torque tracking strategy for antislip control in railway traction systems with common supplies. In Proceedings of the 39th IAS Annual Meeting Industry Applications Conference, Seattle, WA, USA, 3–7 October 2004; pp. 2738–2745. [Google Scholar]
- Verhille, J.; Bouscayrol, A.; Barre, P.; Hautier, J. Validation of anti-slip control for traction system using hardware-in-the-loop simulation. In Proceedings of the IEEE Vehicle Power and Propulsion Conference 2007 (VPPC 2007), Arlington, TX, USA, 9–12 September 2007; pp. 440–447. [Google Scholar]
- Verhille, J.; Bouscayrol, A.; Barre, P.; Hautier, J. Hardware-in-the-loop simulation of the traction system of an automatic subway. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–9. [Google Scholar]
- Lin, W.; Diao, L.; Zhang, G.; Chen, D.; Li, Z. Maximum Adhesion Force Control Simulated Model of Electric Locomotive. In Proceedings of the 2007 International Conference on Automation and Logistics, Jinan, China, 18–21 August 2007; pp. 1704–1708. [Google Scholar]
- Lin, W.; Liu, Z.; Fang, Y. Re-adhesion Optimization Control Strategy for Metro Traction. J. Southwest Jiaotong Univ. 2012, 47, 465–470. [Google Scholar]
- Sado, H.; Sakai, S.; Hori, Y. Road Condition Estimation for Traction Control in Electric Vehicle. In Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE 1999), Bled, Slovenia, 12–16 July 1999; pp. 973–978. [Google Scholar]
- Li, S.; Lu, F.; Yang, Z. Torque Control in Traction Motor Load Simulation System. Electr. Drive 2010, 40, 52–56. [Google Scholar]
- Qin, J. Braking Force Redistribution Strategy Research of High-Speed Train When Slide. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2013. [Google Scholar]
- Zhang, S. CRH2EMU; China Railway Publishing House: Beijing, China, 2008; pp. 9–42. [Google Scholar]
- Ishikawa, Y.; Kawamura, A. Maximum Adhesive Force Control in Super High Speed Train. In Proceedings of the IEEE Power Conversion Conference 1997, Nagaoka, Japan, 6 August 1997; pp. 3–6. [Google Scholar]
- Cao, M.; Takeuchi, K.; Furuya, T.; Kawamura, A. Adhesion Control in Low-Speed Region and Experiment Verification with Considering Low-Resolution Pulse Generator. In Proceedings of the IEEE Power Conversion Conference 2002, Osaka, Japan, 2–5 April 2002; pp. 873–878. [Google Scholar]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, X.; Lin, S.; Yang, Z.; Lin, F.; Sun, H.; Hu, L. Adhesion Control Strategy Based on the Wheel-Rail Adhesion State Observation for High-Speed Trains. Electronics 2018, 7, 70. https://doi.org/10.3390/electronics7050070
Fang X, Lin S, Yang Z, Lin F, Sun H, Hu L. Adhesion Control Strategy Based on the Wheel-Rail Adhesion State Observation for High-Speed Trains. Electronics. 2018; 7(5):70. https://doi.org/10.3390/electronics7050070
Chicago/Turabian StyleFang, Xiaochun, Shuai Lin, Zhongping Yang, Fei Lin, Hu Sun, and Liang Hu. 2018. "Adhesion Control Strategy Based on the Wheel-Rail Adhesion State Observation for High-Speed Trains" Electronics 7, no. 5: 70. https://doi.org/10.3390/electronics7050070
APA StyleFang, X., Lin, S., Yang, Z., Lin, F., Sun, H., & Hu, L. (2018). Adhesion Control Strategy Based on the Wheel-Rail Adhesion State Observation for High-Speed Trains. Electronics, 7(5), 70. https://doi.org/10.3390/electronics7050070