A Hierarchical Vision-Based UAV Localization for an Open Landing

 , ,
, , 

Abstract
1. Introduction
2. Previous Work
3. Feature Recognition and Pose Recovery
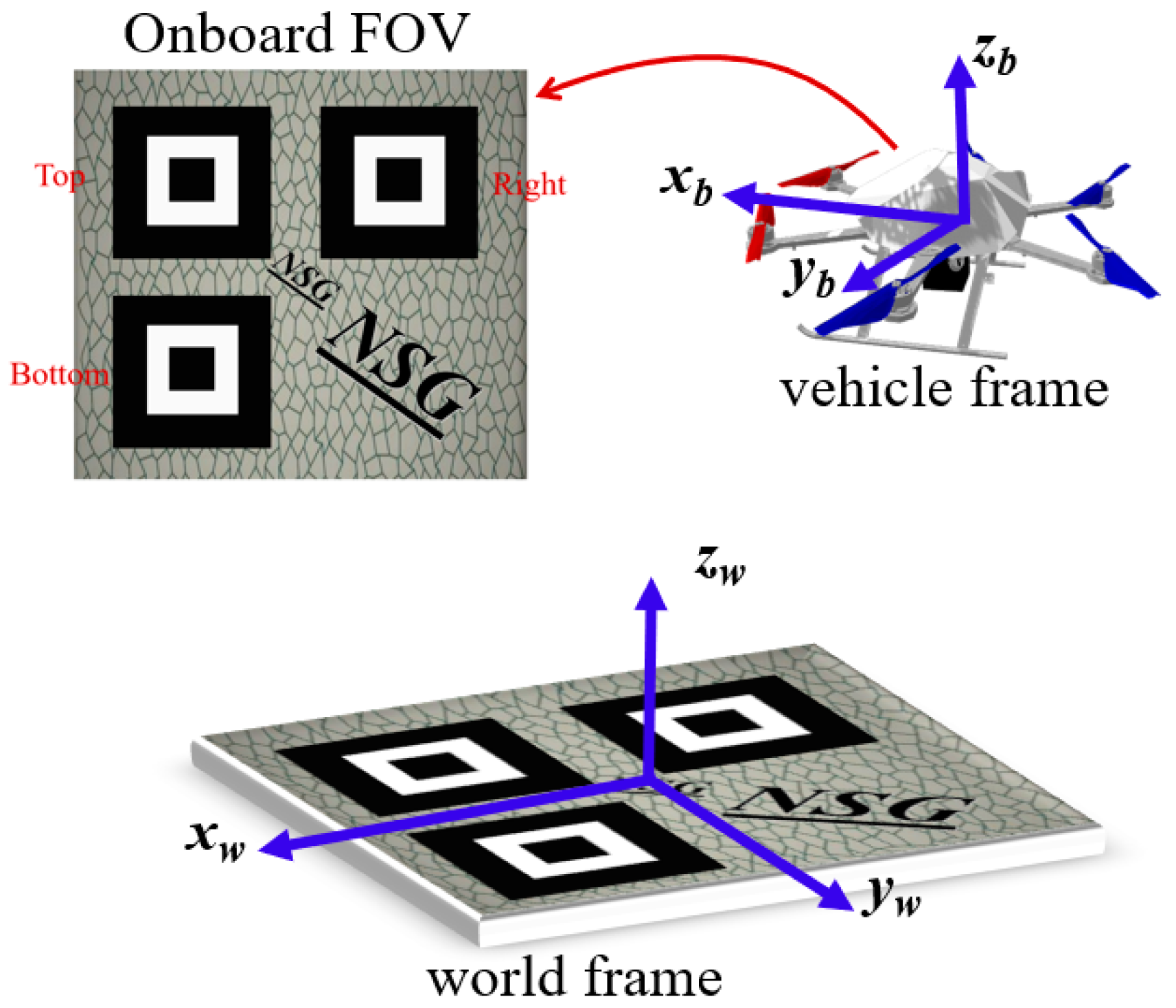
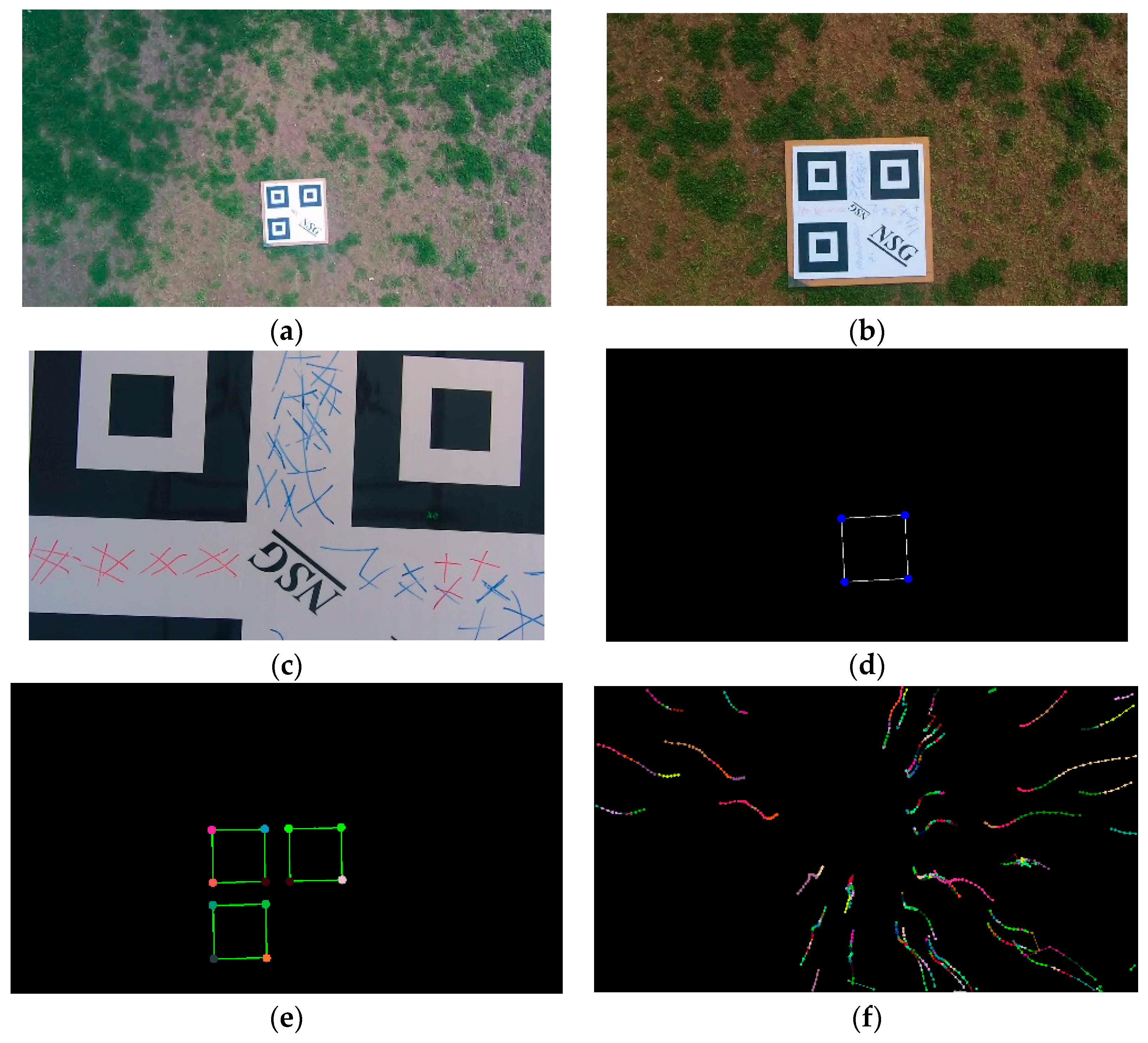
3.1. The RQRLP as Landing Object
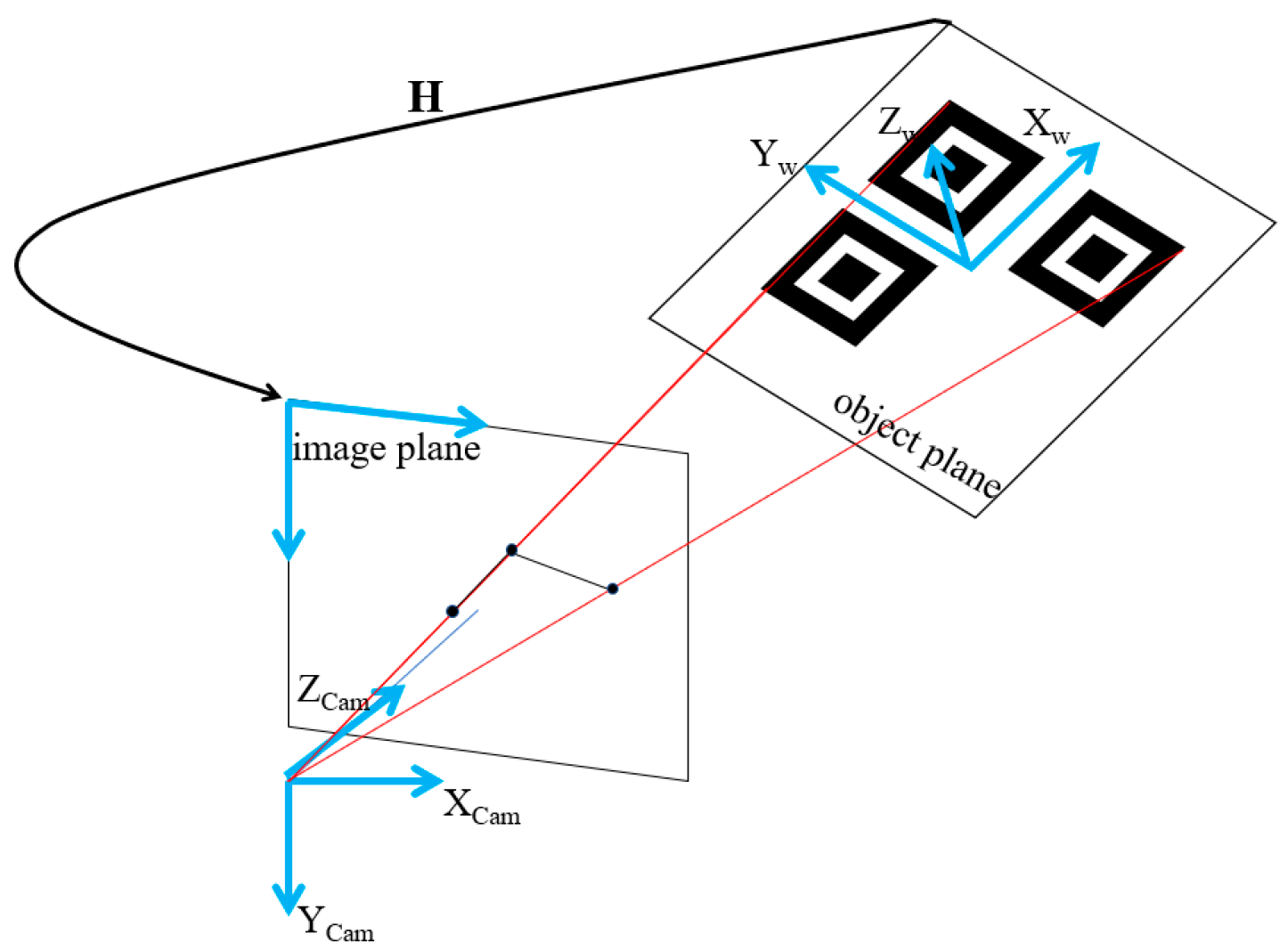
3.2. Pose Recovery Based on Image Homography
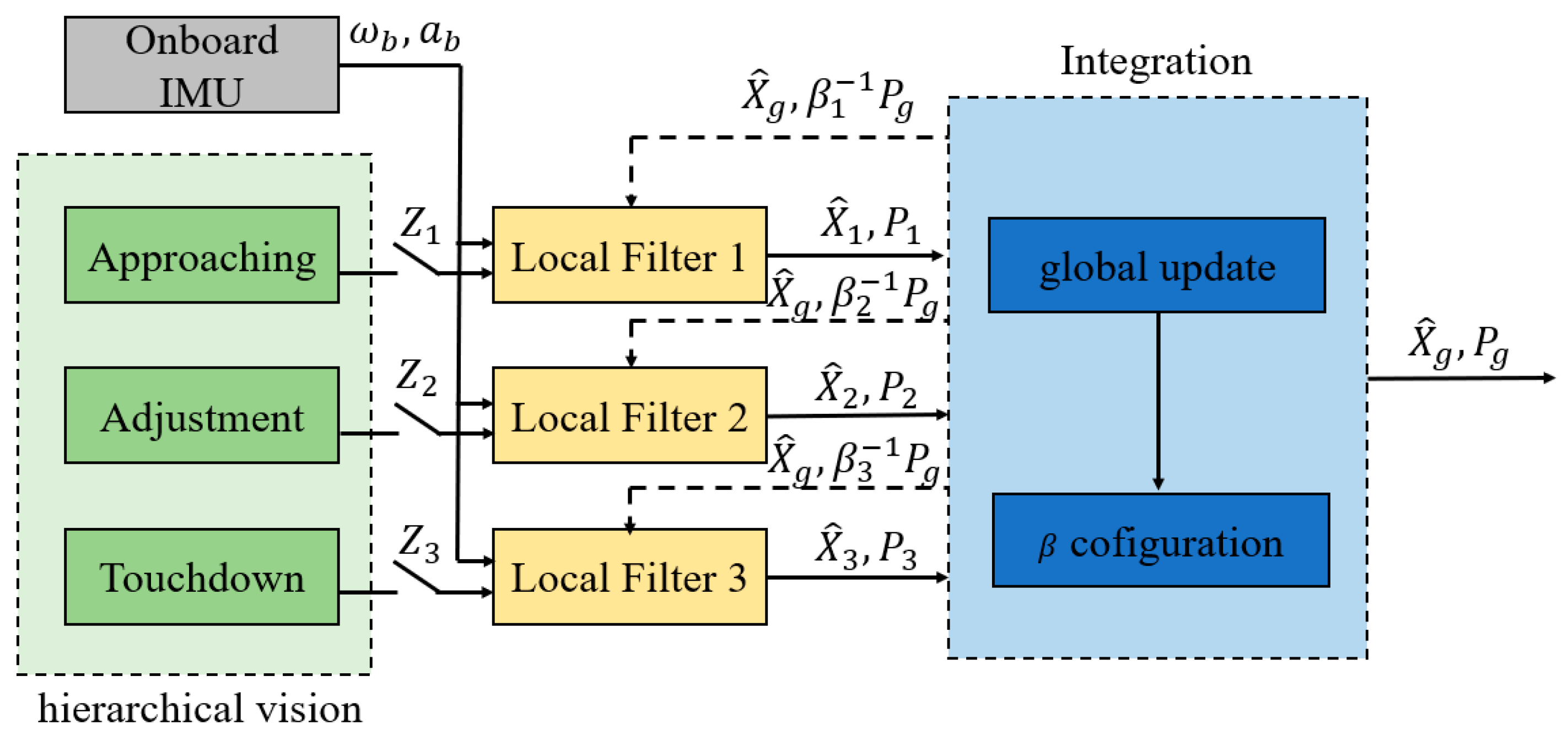
4. A Hierarchical Vision-Based Localization Framework
4.1. Hierarchical Localization
4.2. Pose Integration
5. Field Experiments and Results
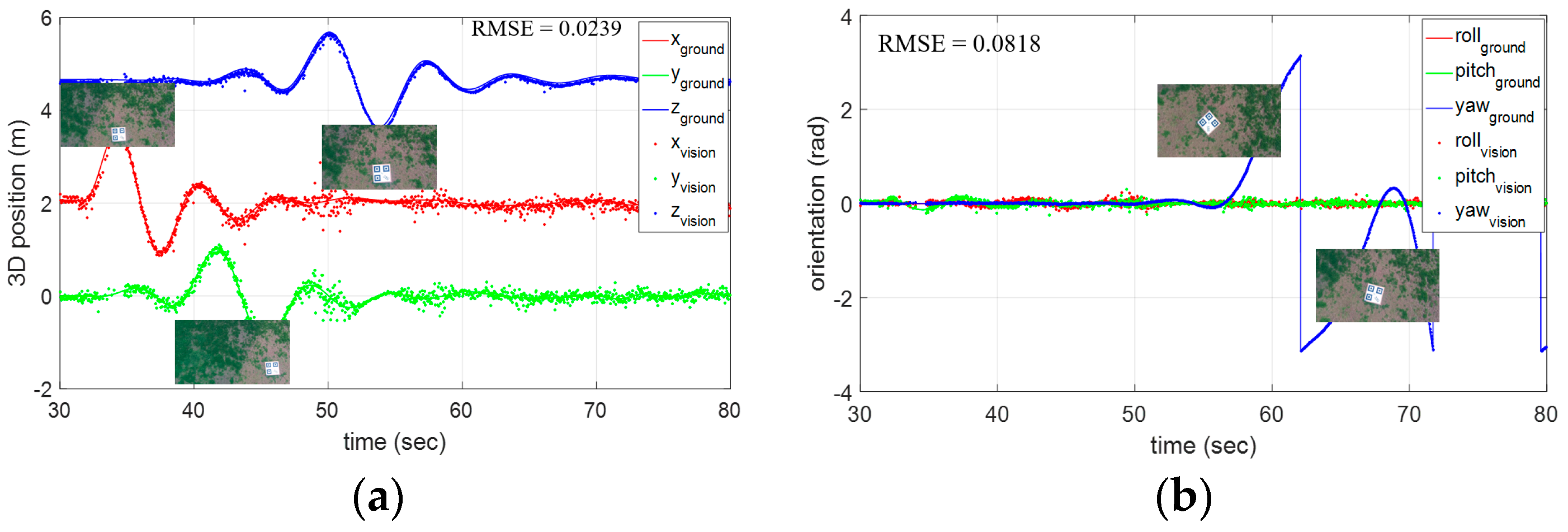
5.1. RQRLP-Based Localization
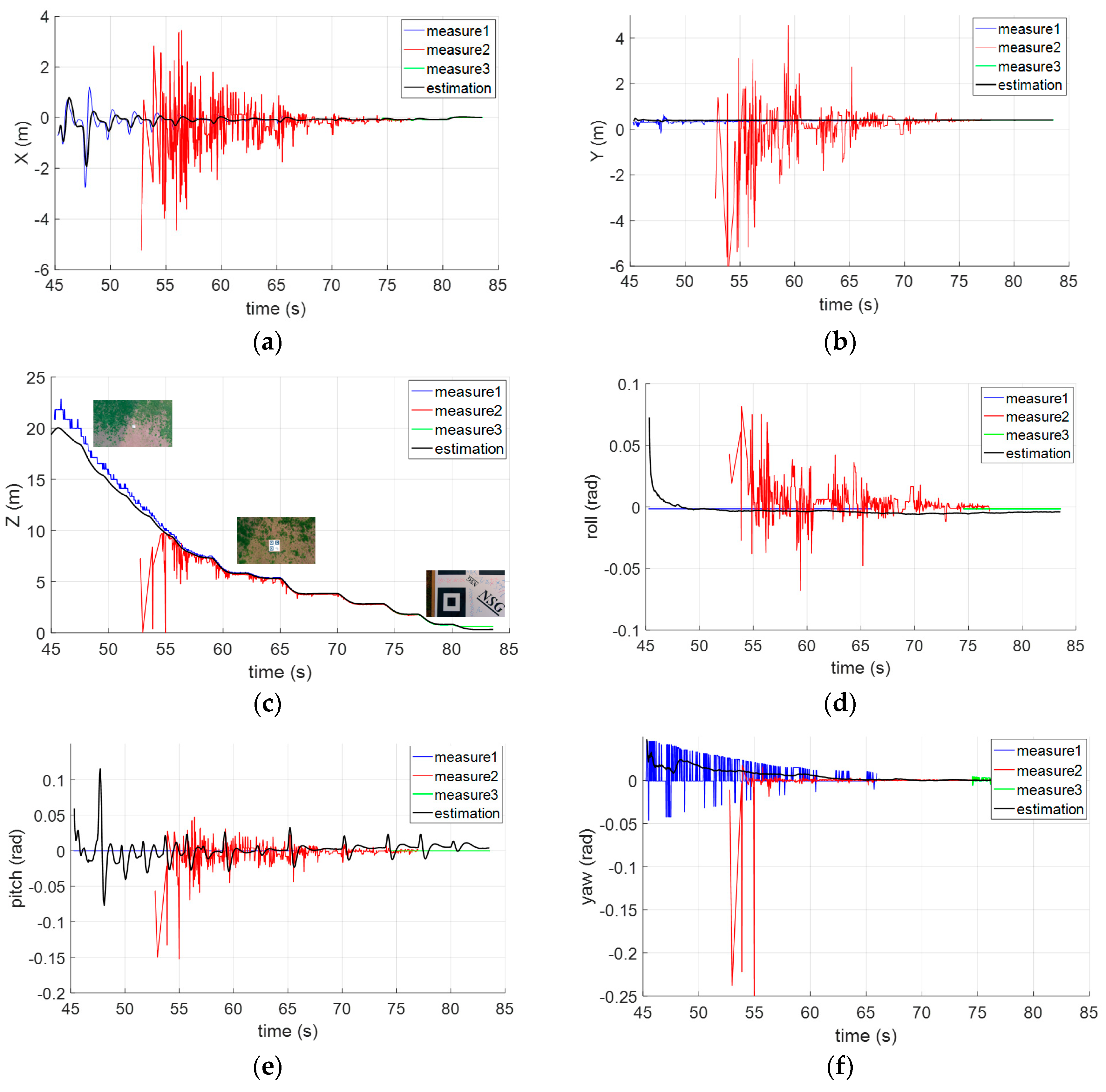
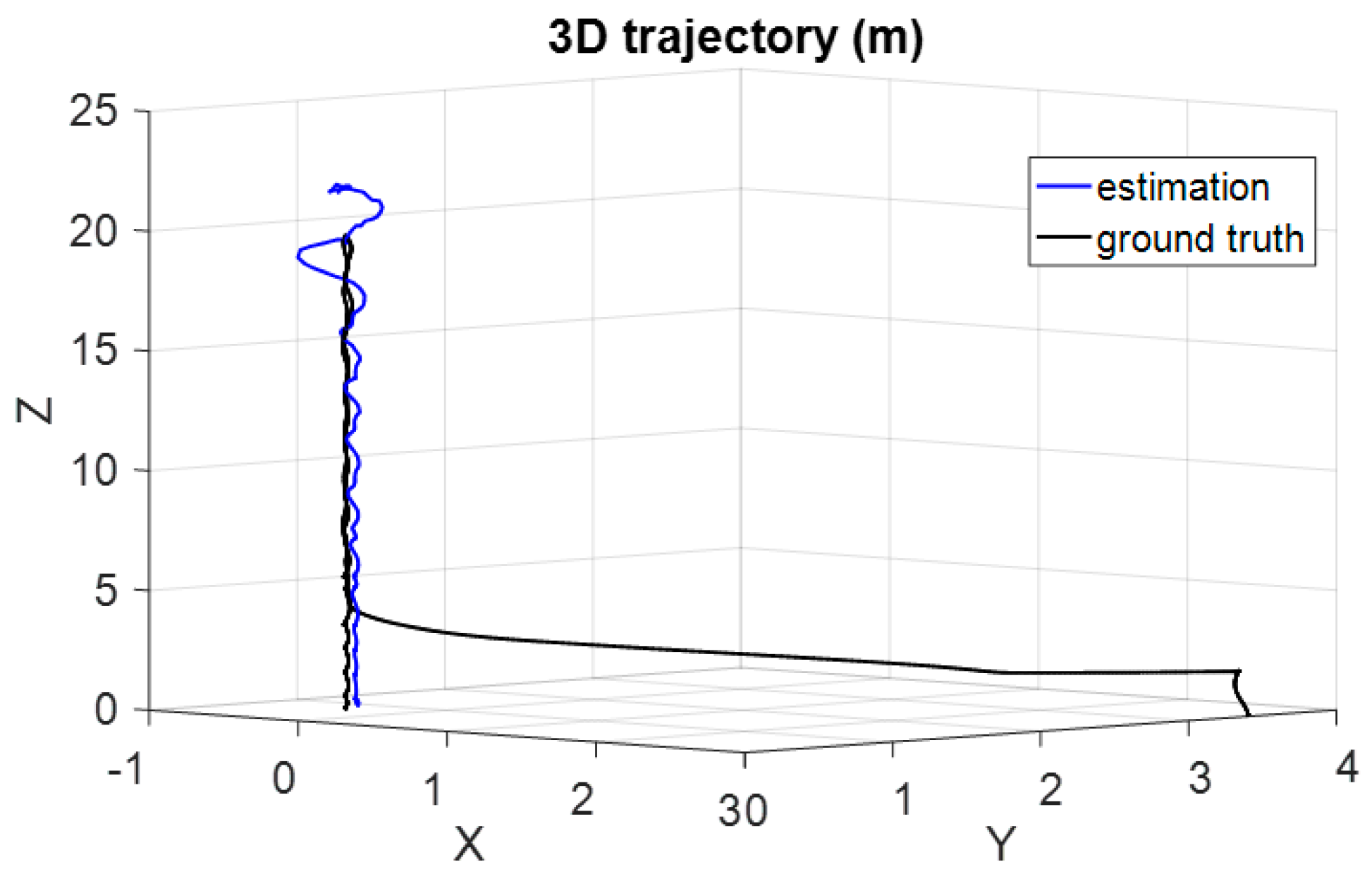
5.2. Hierarchical Localization for an Open Landing
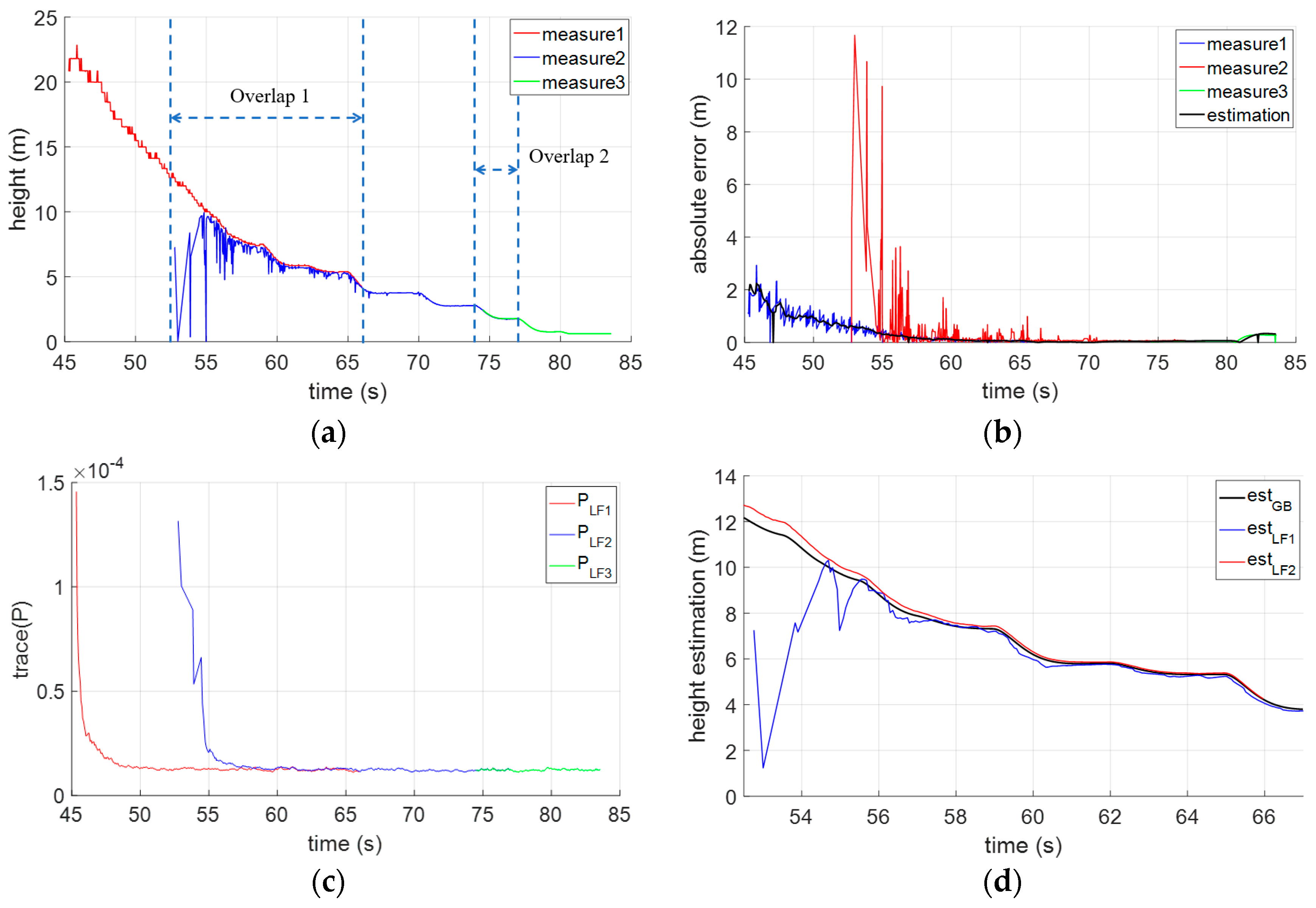
5.3. Performance Analysis and Comparison
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Kendoul, F. A survey of advances in guidance, navigation and control of unmanned rotorcraft systems. J. Field Robot. 2012, 29, 315–378. [Google Scholar] [CrossRef]
- Saripalli, S.; Montgomery, J.F.; Sukhatme, G.S. Visually Guided Landing of an Unmanned Aerial Vehicle. IEEE Trans. Robot Auton. 2003, 19, 371–380. [Google Scholar] [CrossRef]
- Lange, S.; Sunderhauf, N.; Protzel, P. A Vision Based Onboard Approach for Landing and Position Control of an Autonomous Multirotor UAV in GPS-Denied Environments. In Proceedings of the International Conference on Advanced Robotics (ICAR), Munich, Germany, 22–26 June 2009; pp. 22–26. [Google Scholar]
- Xu, G.; Zeng, X.; Tian, Q.; Guo, Y.; Wang, R.; Wang, B. Use of Land’s Cooperative Object to Estimate UAV’s Pose for Autonomous Landing. Chin. J. Aeronaut. 2013, 26, 1498–1505. [Google Scholar] [CrossRef]
- Yang, S.; Scherer, S.A.; Schauwecker, K.; Zell, A. Autonomous Landing of MAVs on an Arbitrarily Textured Landing Site Using Onboard Monocular Vision. J. Intell. Robot. Syst. 2014, 74, 27–43. [Google Scholar] [CrossRef]
- Mondragon, I.F.; Campoy, P.; Martinez, C.; Olivares-Méndez, M.A. 3D pose estimation based on planar object tracking for UAVs control. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 35–41. [Google Scholar]
- Martinez, C.; Mondragon, I.F.; Olivares-Mendez, M.A.; Campoy, P. On-board and Ground Visual Pose Estimation Techniques for UAV Control. J. Intell. Robot. Syst. 2011, 61, 301–320. [Google Scholar] [CrossRef]
- Brockers, R.; Bouffard, P.; Ma, J.; Matthies, L.; Tomlin, C. Autonomous landing and ingress of micro-air-vehicles in urban environments based on monocular vision. In Proceedings of the Micro- and Nanotechnology Sensors, Systems, and Applications III, Orlando, FL, USA, 25–29 April 2011; p. 803111. [Google Scholar]
- Sanchez-Lopez, J.L.; Pestana, J.; Saripalli, S.; Campoy, P. An Approach Toward Visual Autonomous Ship Board Landing of a VTOL UAV. J. Intell. Robot. Syst. 2014, 74, 113–127. [Google Scholar] [CrossRef]
- Lin, S.; Garratt, M.A.; Lambert, A.J. Monocular vision-based real-time target recognition and tracking for autonomously landing an UAV in a cluttered shipboard environment. Auton. Robots 2016, 41, 881–901. [Google Scholar] [CrossRef]
- Li, A.Q.; Coskun, A.; Doherty, S.M.; Ghasemlou, S.; Jagtap, A.S.; Modasshir, M.; Rahman, S.; Singh, A.; Xanthidis, M.; O’Kane, J.M.; et al. Experimental Comparison of open source Vision based State Estimation Algorithms. Int. Symp. Exp. Robot. 2016, 775–786. [Google Scholar] [CrossRef]
- Srinivasan, M.V. Honeybees as a model for the study of visually guided flight navigation and biologically inspired robotics. Physiol. Rev. 2011, 91, 413–460. [Google Scholar] [CrossRef] [PubMed]
- Chahl, J.S.; Srinivasan, M.V.; Zhang, S.W. Landing strategies in honey bees and applications to uninhabited airborne vehicles. Int. J. Robot. Res. 2004, 23, 101–110. [Google Scholar] [CrossRef]
- Strydom, R.; Thurrowgood, S.; Srinivasan, M.V. Visual Odometry: Autonomous UAV Navigation using Optic Flow and Stereo. In Proceedings of the Australasian Conference on Robotics and Automation, Melbourne, Australia, 2–4 December 2014. [Google Scholar]
- Shen, S.; Mulgaonkar, Y.; Michael, N.; Kumar, V. Vision-based state estimation for autonomous rotorcraft mavs in complex environments. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1758–1764. [Google Scholar]
- Forster, C.; Pizzoli, M.; Scaramuzza, D. SVO: Fast semi-direct monocular visual odometry. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 15–22. [Google Scholar]
- Thurrowgood, S.; Moore, R.J.D.; Soccol, D.; Knight, M.; Srinivasan, M.V. A Biologically Inspired, Vision-based Guidance System for Automatic Landing of a Fixed-wing Aircraft. J. Field Robot. 2014, 31, 699–727. [Google Scholar] [CrossRef]
- Denuelle, A.; Thurrowgood, S.; Strydom, R.; Kendoul, F.; Srinivasan, M.V. Biologically-inspired visual stabilization of a rotorcraft UAV in unknown outdoor environments. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 1084–1093. [Google Scholar]
- Kendoul, F.; Fantoni, I.; Nonami, K. Optic flow-based vision system for autonomous 3D localization and control of small aerial vehicles. Robot. Auton. Syst. 2009, 57, 591–602. [Google Scholar] [CrossRef]
- Herisse, B.; Hamel, T.; Mahony, R.; Russotto, F.X. Landing a VTOL Unmanned Aerial Vehicle on a Moving Platform Using Optical Flow. IEEE Trans. Robot. 2012, 28, 77–89. [Google Scholar] [CrossRef]
- Wenzel, K.E.; Rosset, P.; Zell, A. Low-Cost Visual Tracking of a Landing Place and Hovering Flight Control with a Microcontroller. J. Intell. Robot. Syst. 2010, 57, 297–311. [Google Scholar] [CrossRef]
- Li, P.; Garratt, M.; Lambert, A. Monocular Snapshot-based Sensing and Control of Hover Takeoff and Landing for a Low-cost Quadrotor: Monocular Snapshot-based Sensing and Control. J. Field Robot. 2015, 32, 984–1003. [Google Scholar] [CrossRef]
- Kong, W.; Hu, T.; Zhang, D.; Shen, L.; Zhang, J. Localization Framework for Real-Time UAV Autonomous Landing: An On-Ground Deployed Visual Approach. Sensor 2017, 17, 1437. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Hu, T.; Shen, L. Stereo vision guiding for the autonomous landing of fixed-wing UAVs: A saliency-inspired approach. Int. J. Adv. Robot. Syst. 2016, 13, 43. [Google Scholar] [CrossRef]
- Yuan, H.; Xiao, C.; Xiu, S.; Wen, Y.; Zhou, C.; Li, Q. A new combined vision technique for micro aerial vehicle pose estimation. Robotics 2017, 6, 6. [Google Scholar] [CrossRef]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Bazargani, H.; Bilaniuk, O.; Laganière, R. A fast and robust homography scheme for real-time planar target detection. J. Real-Time Image Proc. 2015, 1–20. [Google Scholar] [CrossRef]
- XSENS MTi-G-700. Available online: https://www.xsens.com/products/mti-g-700/ (accessed on 30 March 2018).
- Breitenmoser, A.; Kneip, L.; Siegwart, R. A Monocular Vision based System for 6D Relative Robot Localization. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Sharp, C.S.; Shakernia, O.; Sastry, S.S. A vision system for landing an unmanned aerial vehicle. In Proceedings of the IEEE International Conference on Robotics and Automation (Cat. No.01CH37164), Seoul, Korea, 21–26 May 2001; pp. 1720–1727. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Specification |
|---|---|
| UAV frame | six rotors, arm length 1.6 m, total weight 3.2 kg |
| GOPRO camera | 1080 p, 50 fps, focal length 1280 pixels, principal point: (948.9, 543.2), distortion factor (−0.00908, −0.03128, 0.00109, −0.00198, 0) |
| Xsens IMU | 100~400 Hz, Gyroscope: full range 450 deg/s, noise density 0.01 ; Acceleration: full range 50 m/s2, noise density 80 . |
| Methods | Ref [6] | Ref [29] | Ref [5] | Ref [30] | Ours |
|---|---|---|---|---|---|
| Position RMSE (m) | 0.2467 | 0.015 | 0.0392 | <0.05 | 0.0639 |
| Orientation RMSE () | 0.0653 | 0.0209 | 0.0436 | <0.0872 | 0.0818 |
| Range (m) | 3~10 | 0.677~1.741 | 1 | 1~1.1 | 0~20 |
| Pose (DOF) | 4-DOF | 6-DOF | 6-DOF | 6-DOF | 6-DOF |
| Object size (m) | 0.91 × 1.19 | 0.01 (diameter) | 0.18 (diameter) | unknown | 0.85 × 0.85 |
| Vision Resolution (pixels) | 640 × 480 | 752 × 480 | 640 × 480 | 320 × 240 | 1920 × 1080 |
| field of view () | unknown | 90 | 90 | unknown | 90 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, H.; Xiao, C.; Xiu, S.; Zhan, W.; Ye, Z.; Zhang, F.; Zhou, C.; Wen, Y.; Li, Q. A Hierarchical Vision-Based UAV Localization for an Open Landing. Electronics 2018, 7, 68. https://doi.org/10.3390/electronics7050068
Yuan H, Xiao C, Xiu S, Zhan W, Ye Z, Zhang F, Zhou C, Wen Y, Li Q. A Hierarchical Vision-Based UAV Localization for an Open Landing. Electronics. 2018; 7(5):68. https://doi.org/10.3390/electronics7050068
Chicago/Turabian StyleYuan, Haiwen, Changshi Xiao, Supu Xiu, Wenqiang Zhan, Zhenyi Ye, Fan Zhang, Chunhui Zhou, Yuanqiao Wen, and Qiliang Li. 2018. "A Hierarchical Vision-Based UAV Localization for an Open Landing" Electronics 7, no. 5: 68. https://doi.org/10.3390/electronics7050068
APA StyleYuan, H., Xiao, C., Xiu, S., Zhan, W., Ye, Z., Zhang, F., Zhou, C., Wen, Y., & Li, Q. (2018). A Hierarchical Vision-Based UAV Localization for an Open Landing. Electronics, 7(5), 68. https://doi.org/10.3390/electronics7050068