Digital Control Techniques Based on Voltage Source Inverters in Renewable Energy Applications: A Review



Abstract
1. Introduction
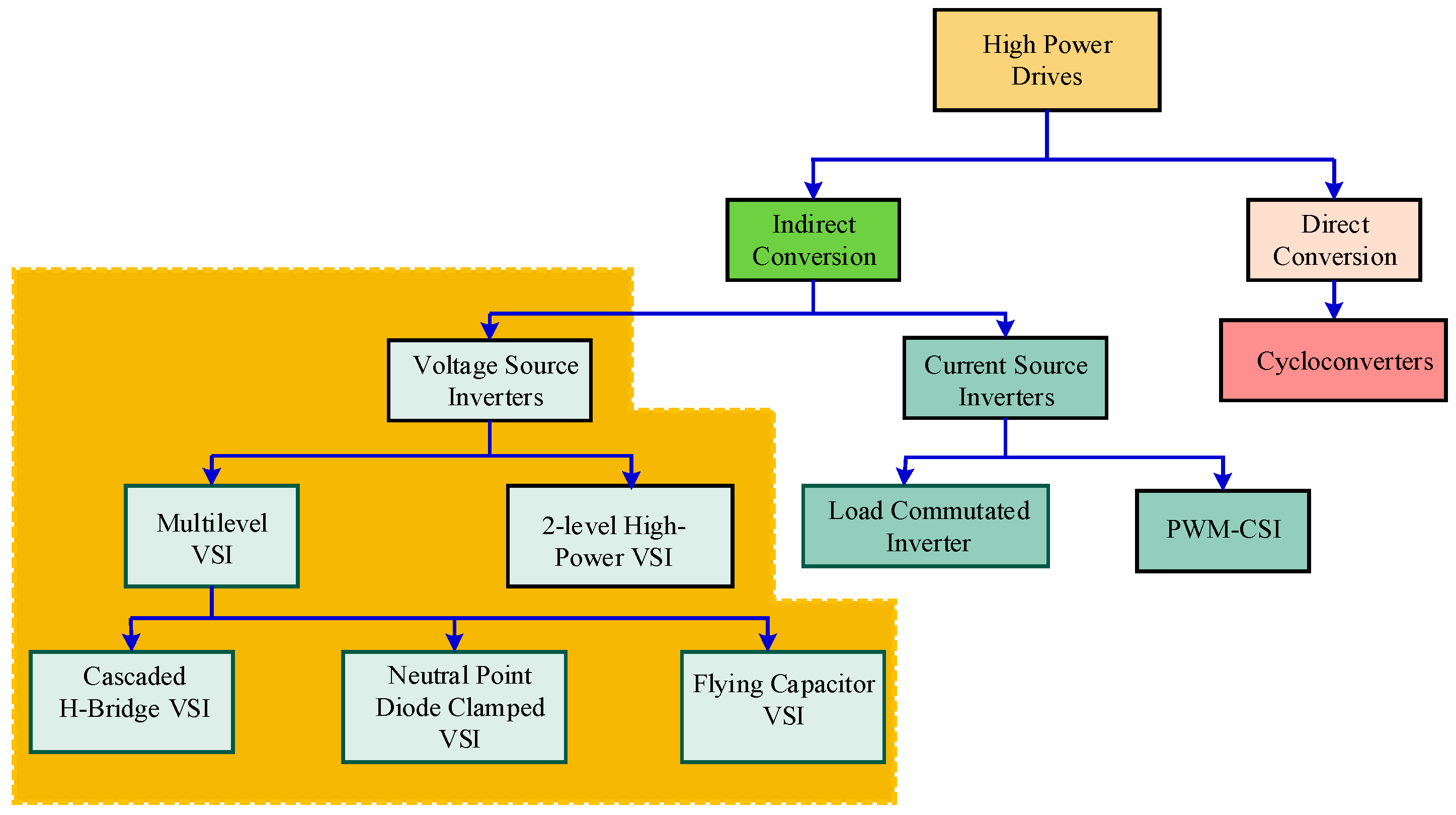
2. Classification of VSIs
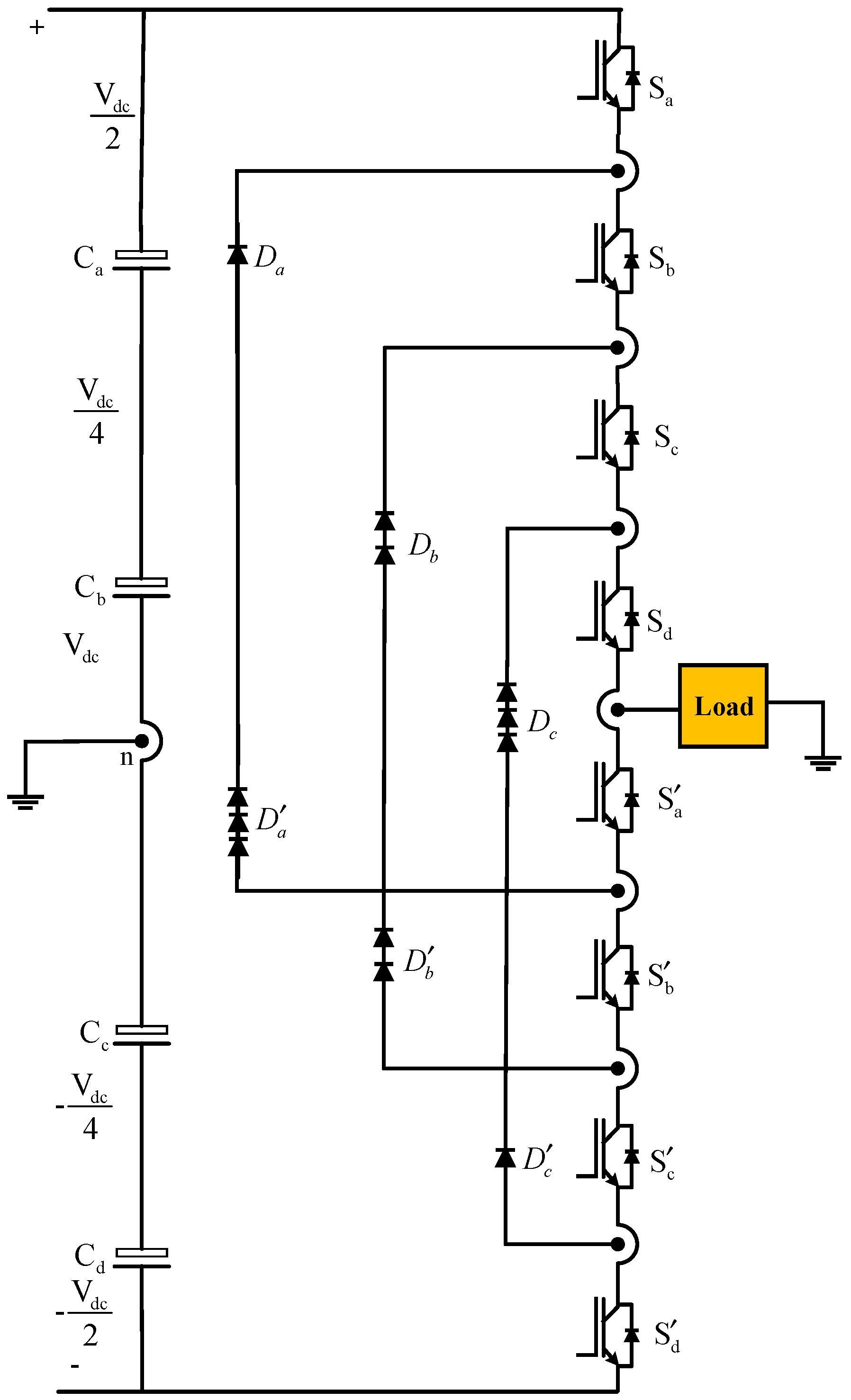
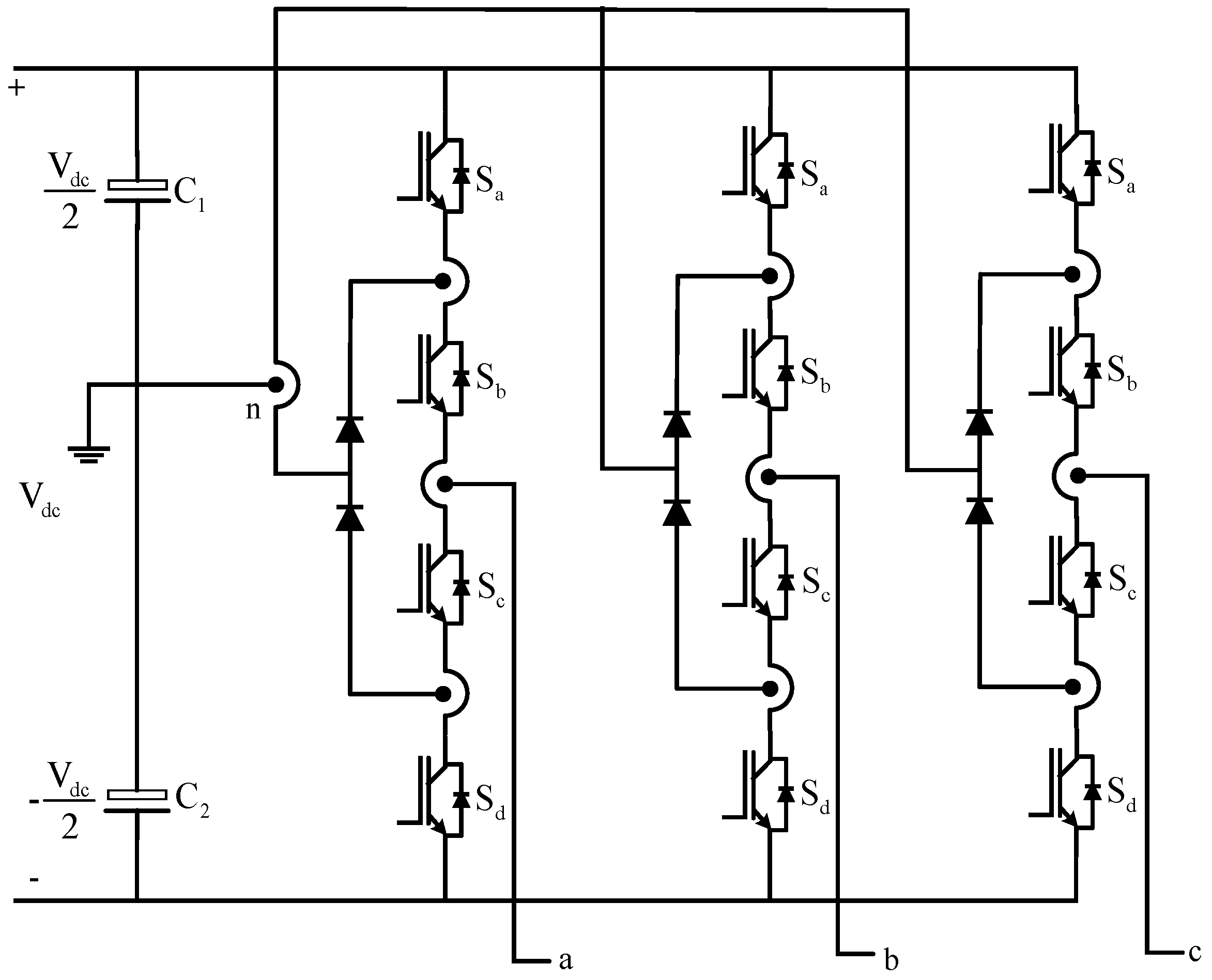
2.1. Multilevel Diode Neutral-Point Clamped Inverter
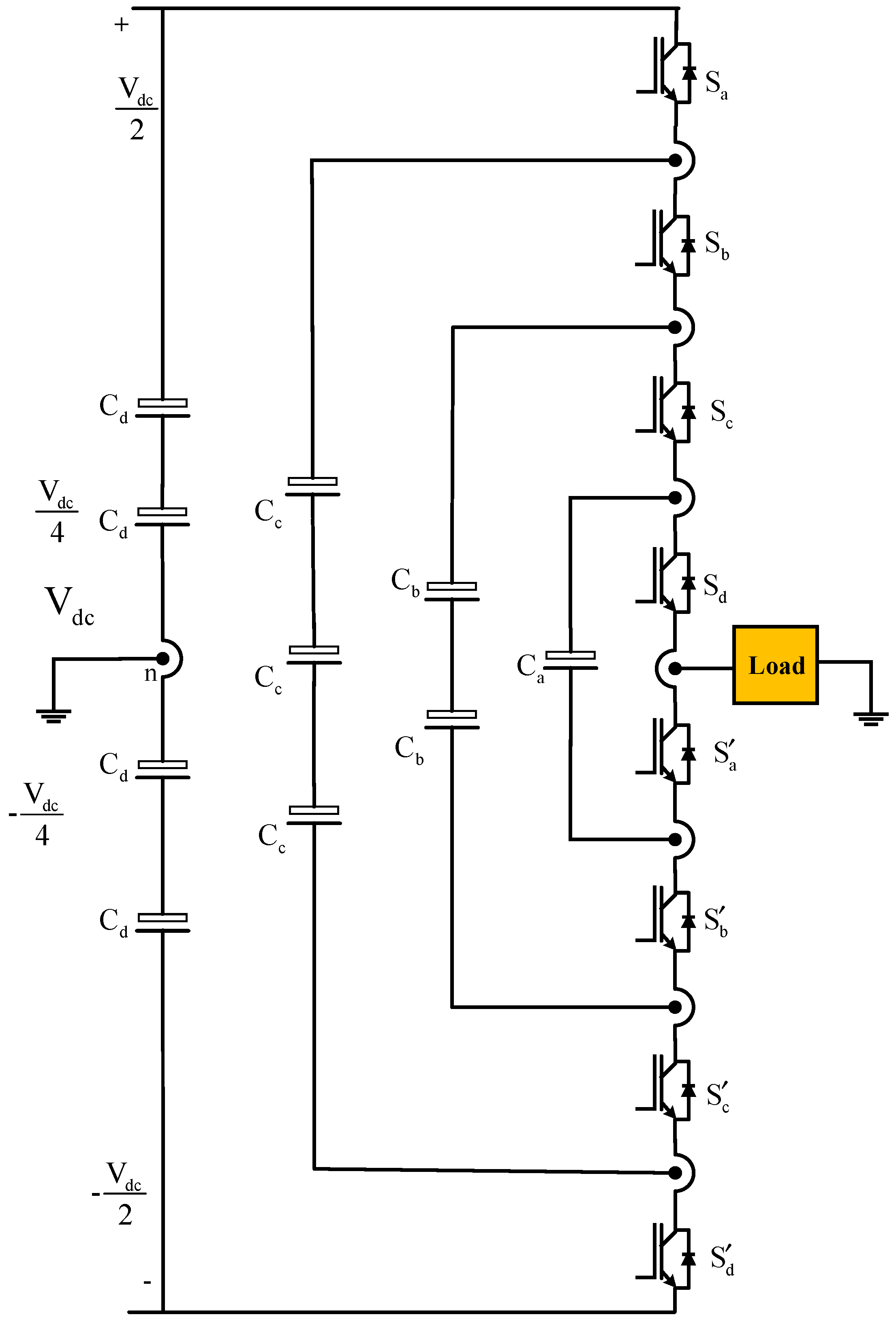
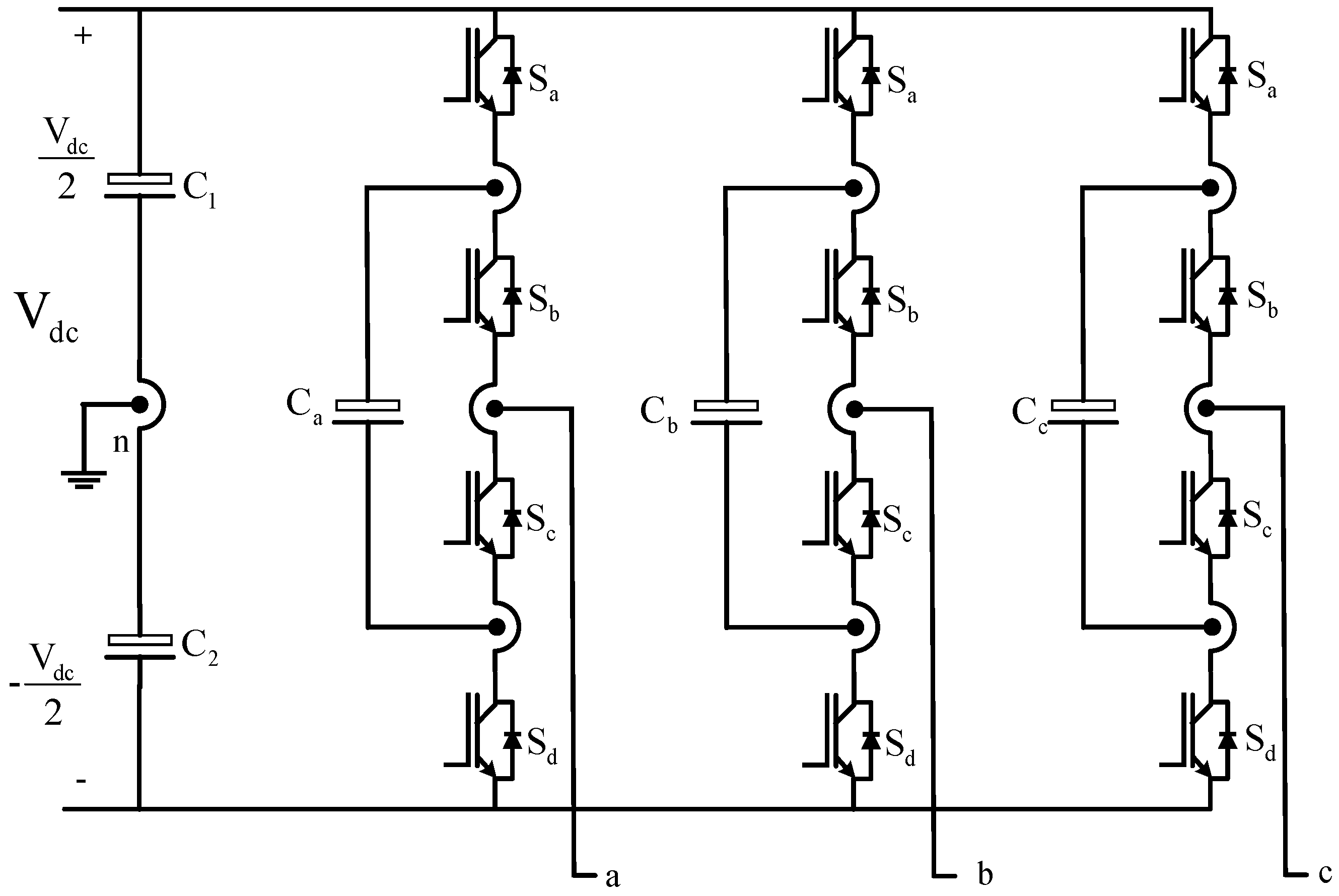
2.2. Multilevel Capacitor Clamped/Flying Capacitor Inverter
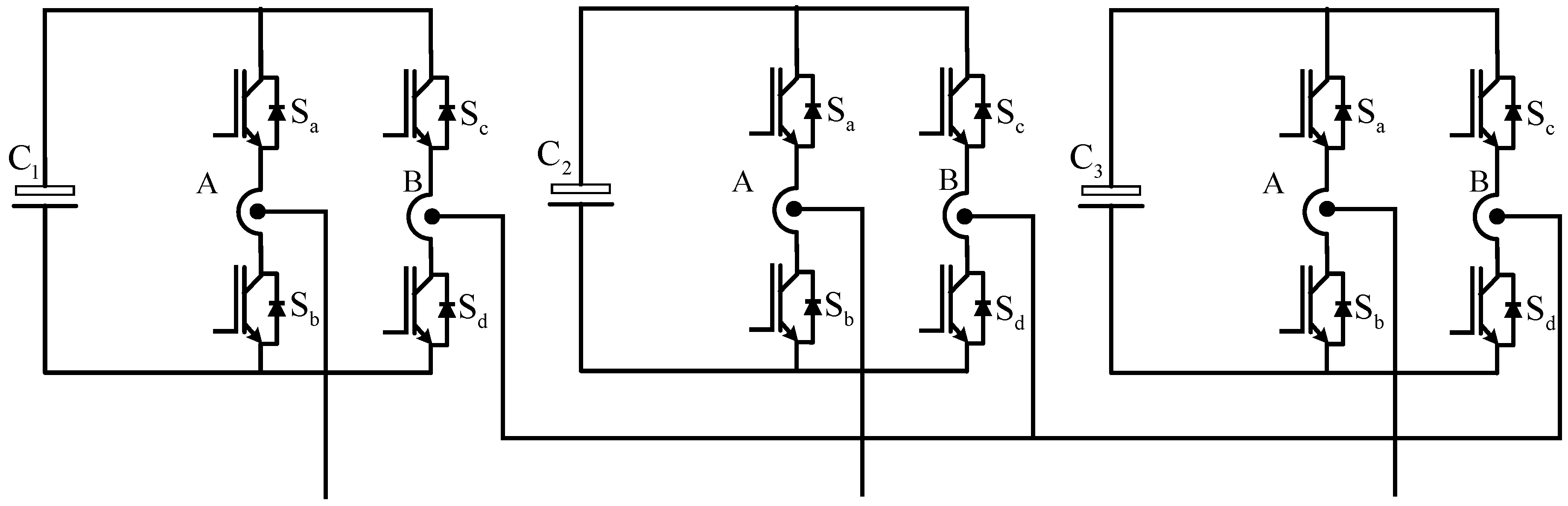
2.3. Cascaded H-Bridge Inverter
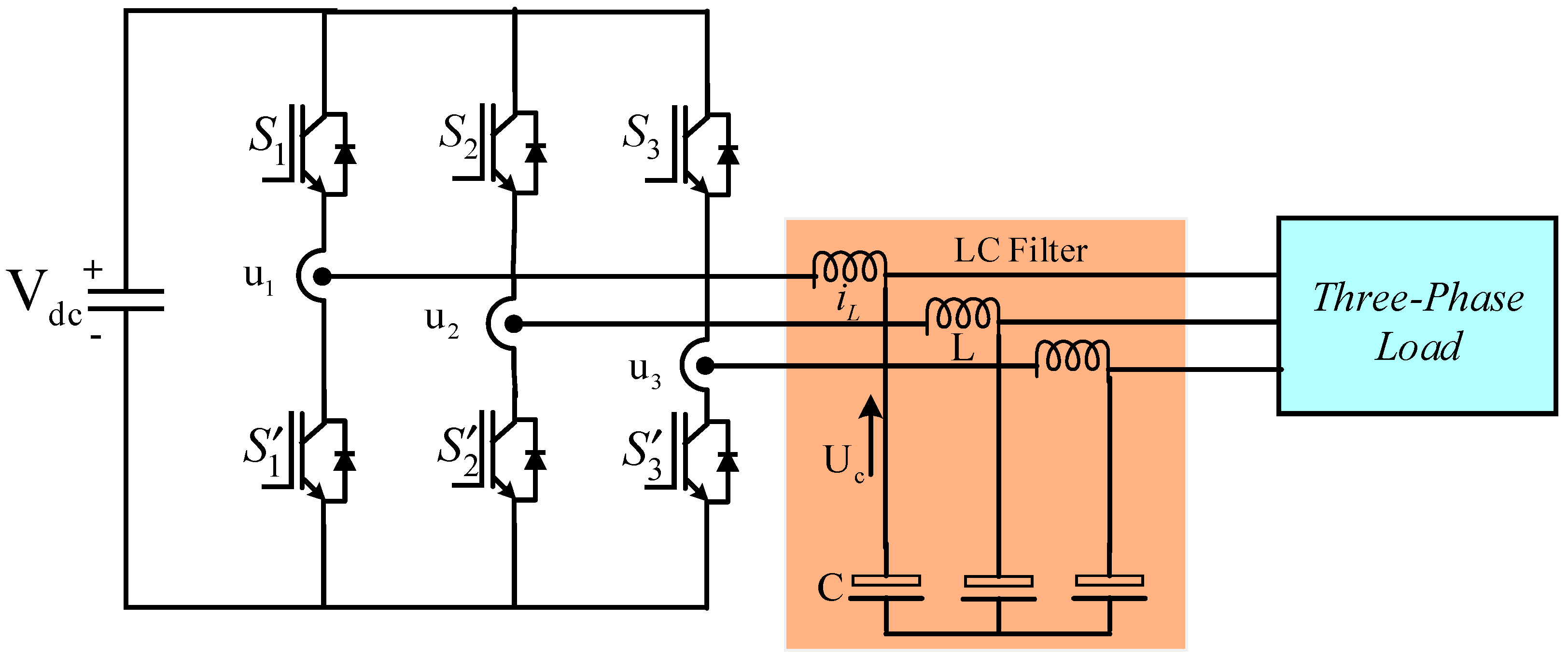
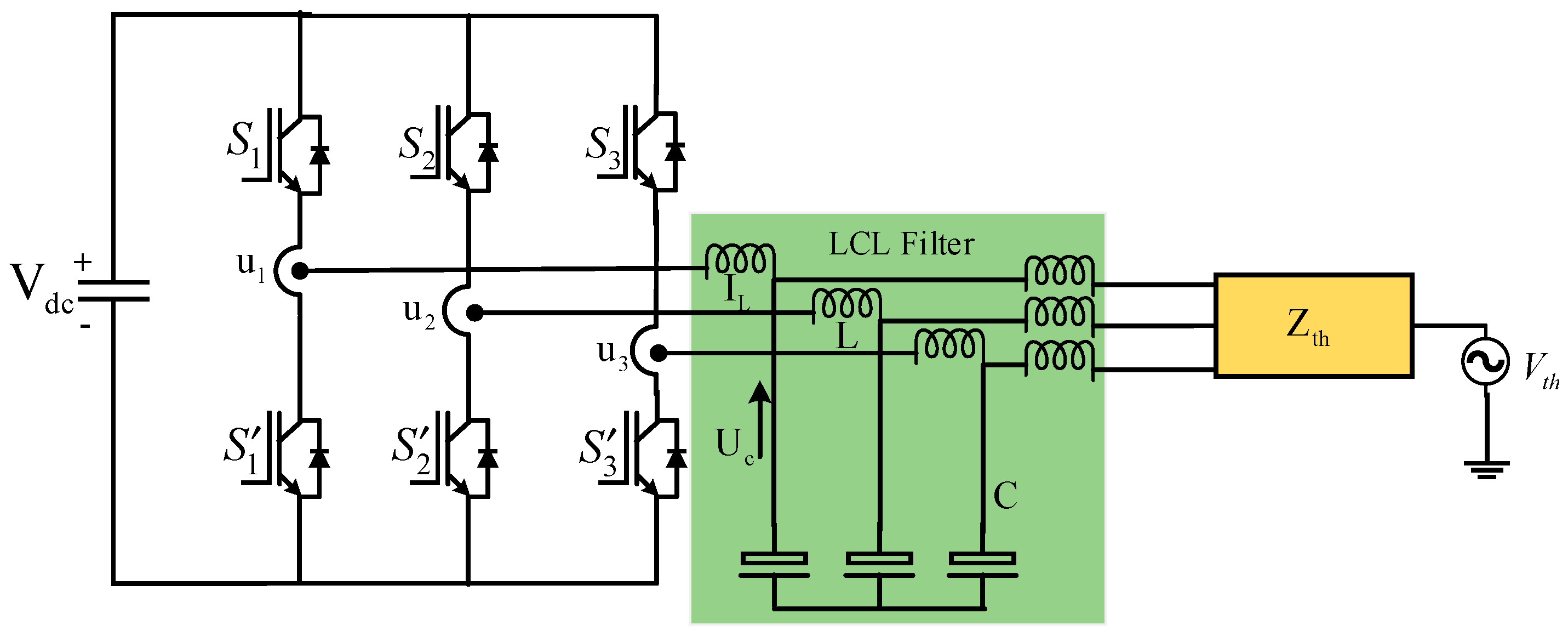
2.4. Two-Level Three Phase VSI with an Output Filter
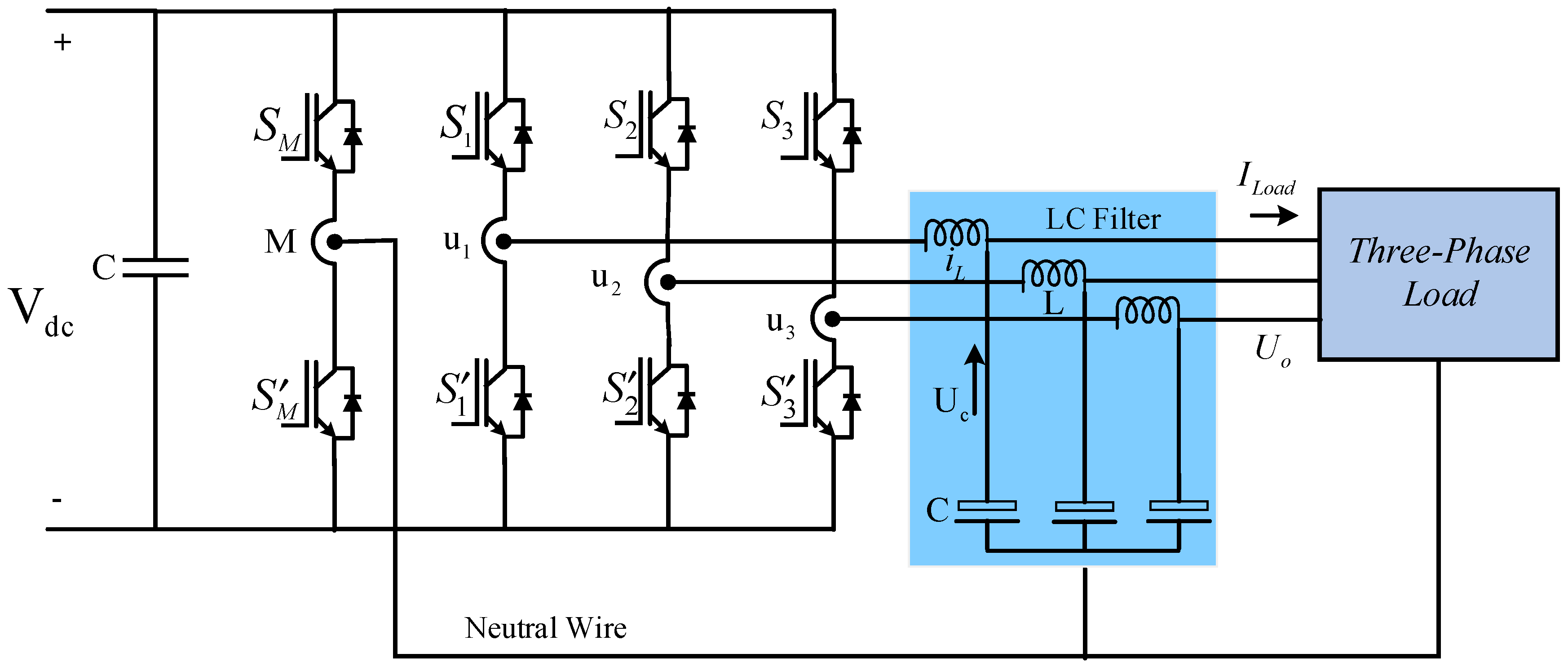
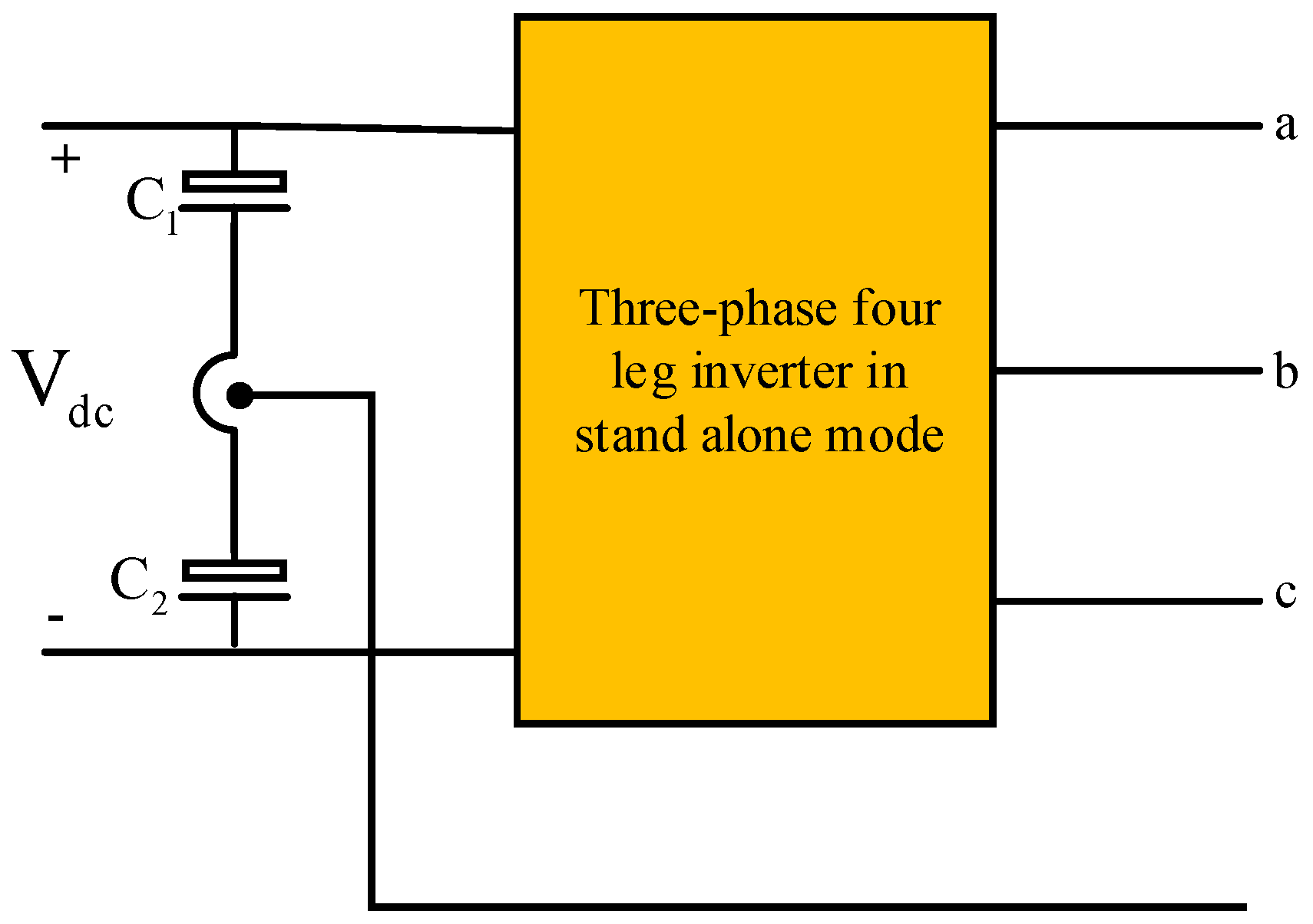
2.5. Three Phase Four-Leg VSI with an Output Filter
3. Characteristics of Control Systems
3.1. Analog Control System
3.2. Digital Control System
4. Reference Frames
4.1. abc Reference Frame
4.2. dq Reference Frame
4.3. αβ Reference Frame
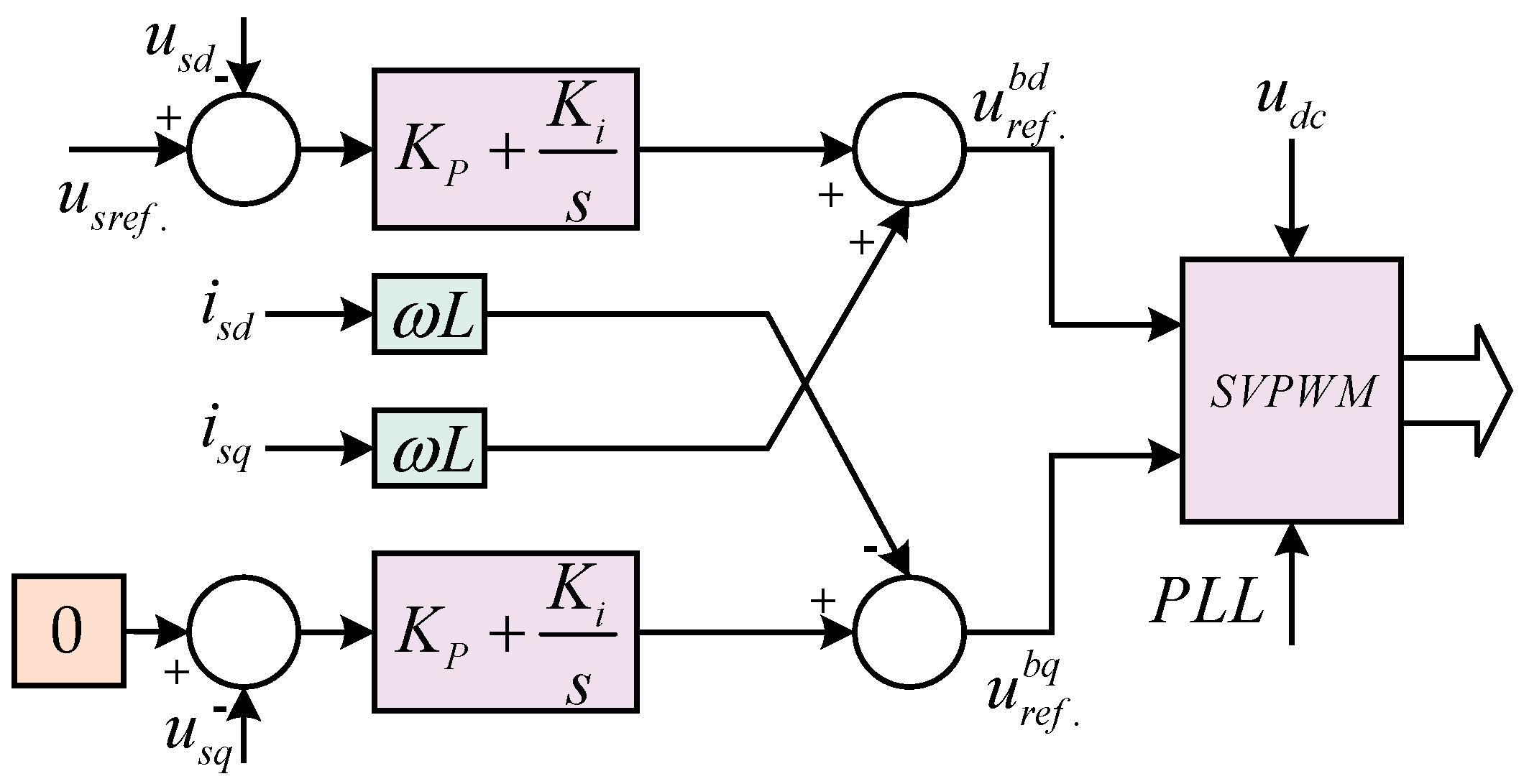
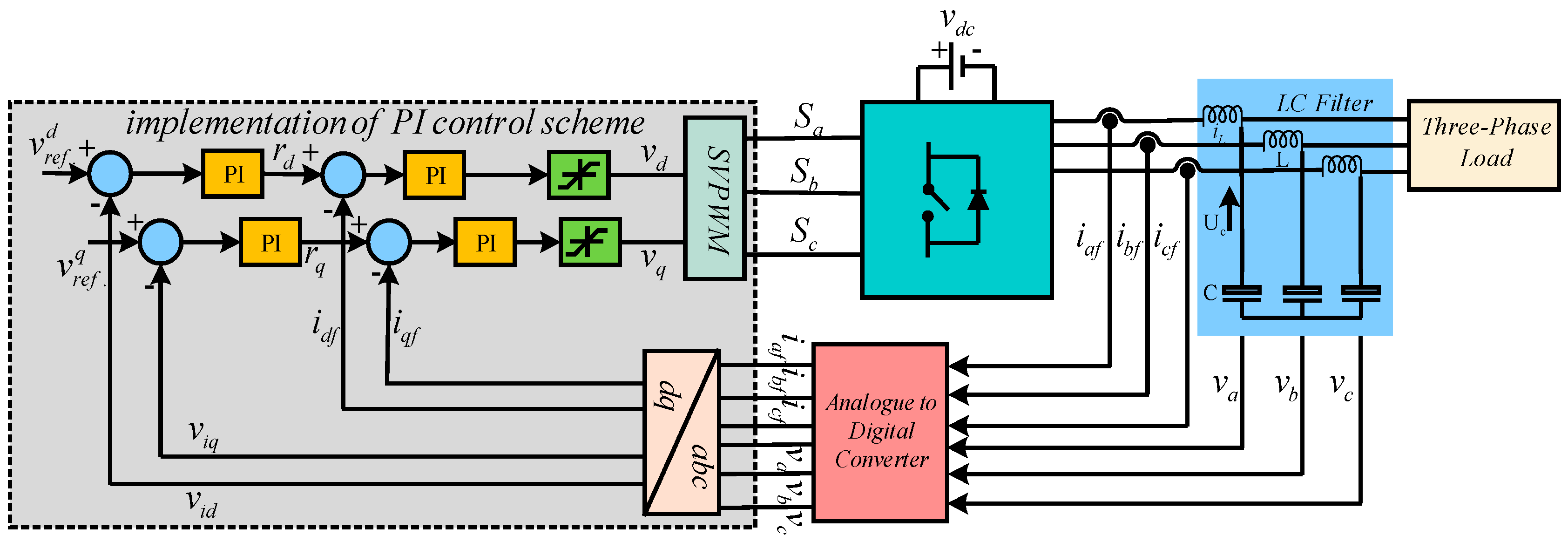
5. The Control Strategy in Decoupled dq Frame
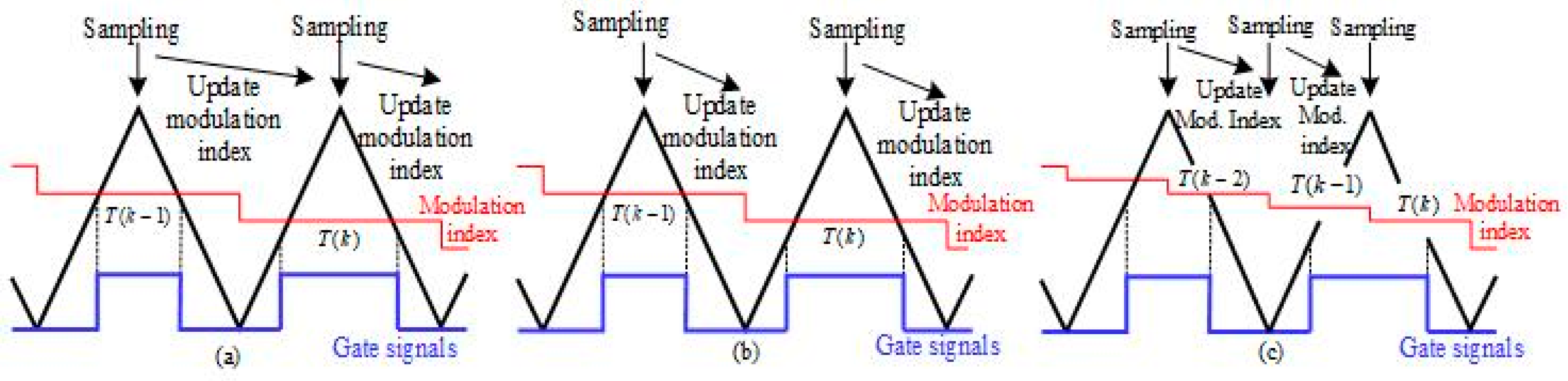
6. Time Delay Sampling Scheme for VSI
7. Output Filters for Inverters
7.1. L-Filter
7.2. LC-Filter
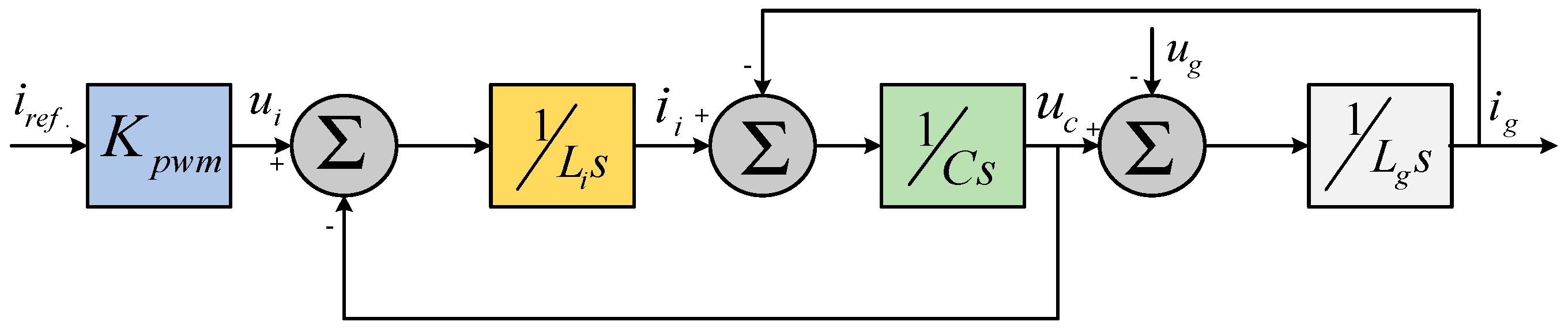
7.3. LCL-Filter
8. Damping Techniques for Grid-Connected VSIs
8.1. Passive Damping
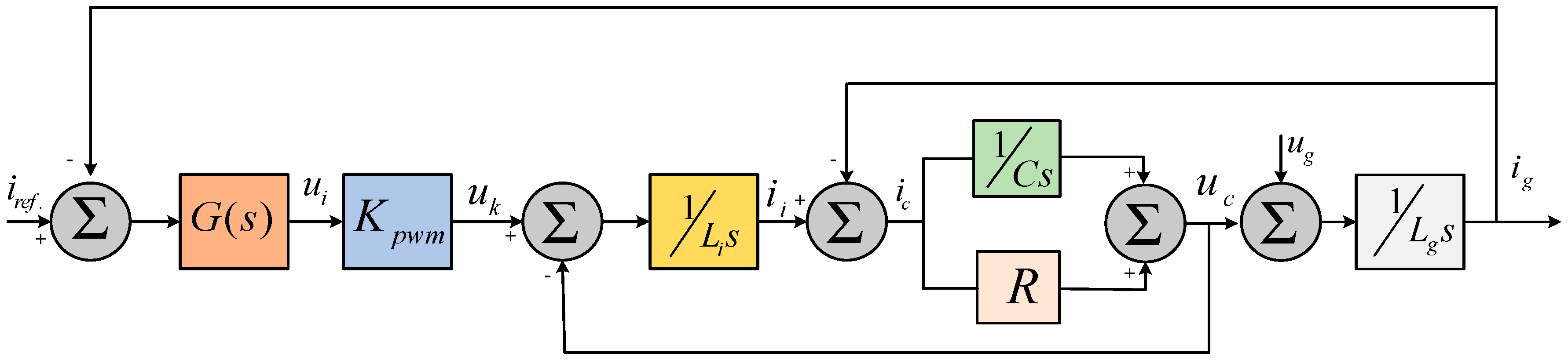
8.2. Active Damping
9. Grid Synchronization Techniques
9.1. Zero-Crossing Technique
9.2. Filtering of Grid Voltages
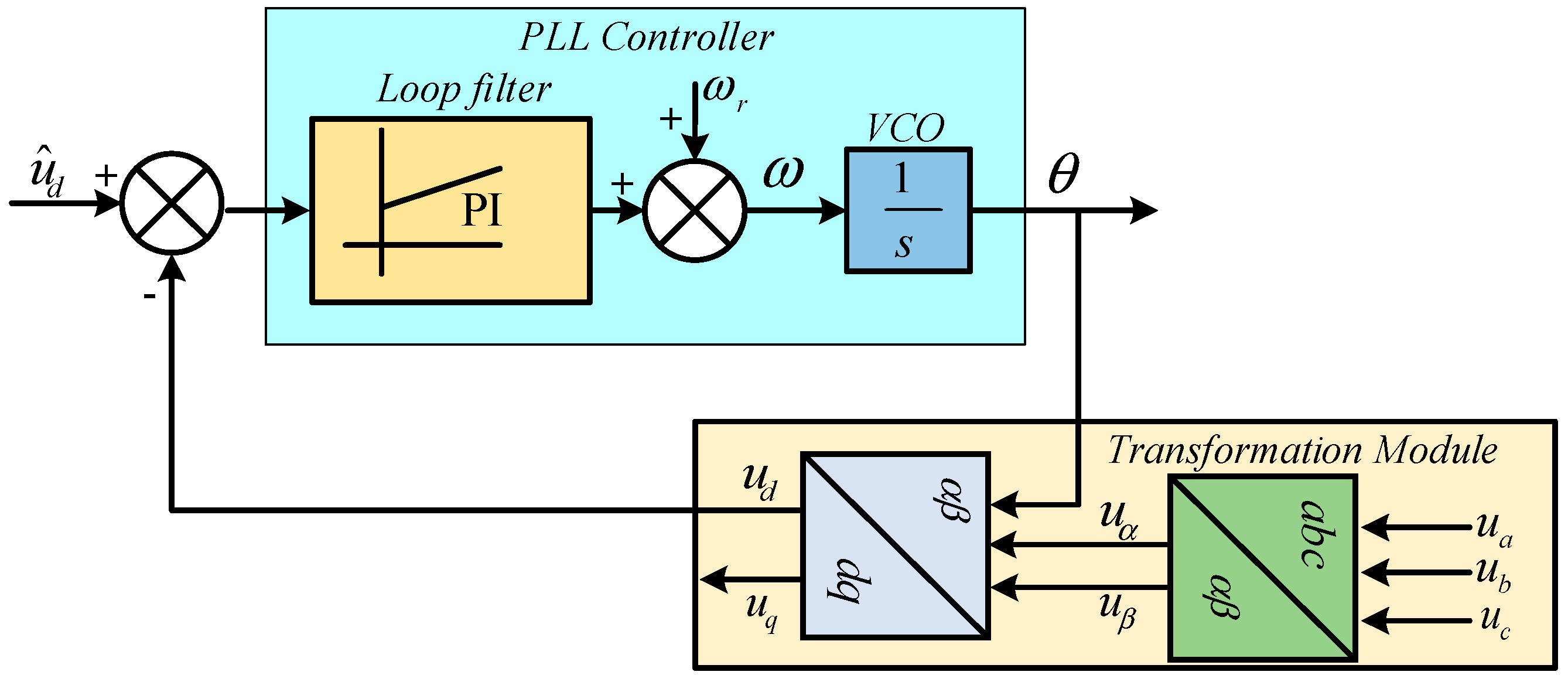
9.3. Phase Locked Loop Technique
10. Modulation Schemes
10.1. Triangular Comparison Based PWM
10.2. Space Vector Based PWM
10.3. Voltage Look-Up Table-Based PWM
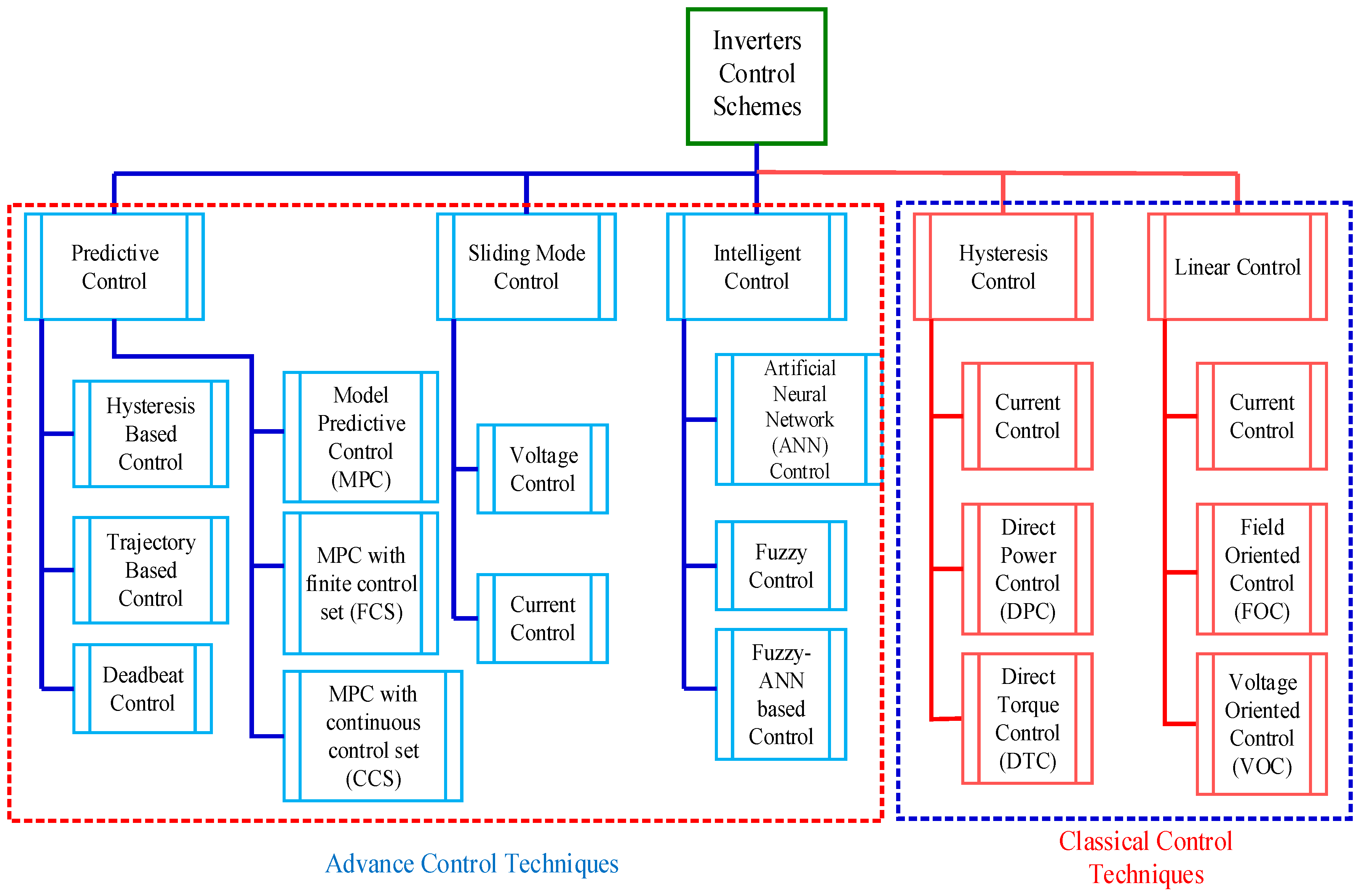
11. Control Techniques
11.1. Classical Control Techniques
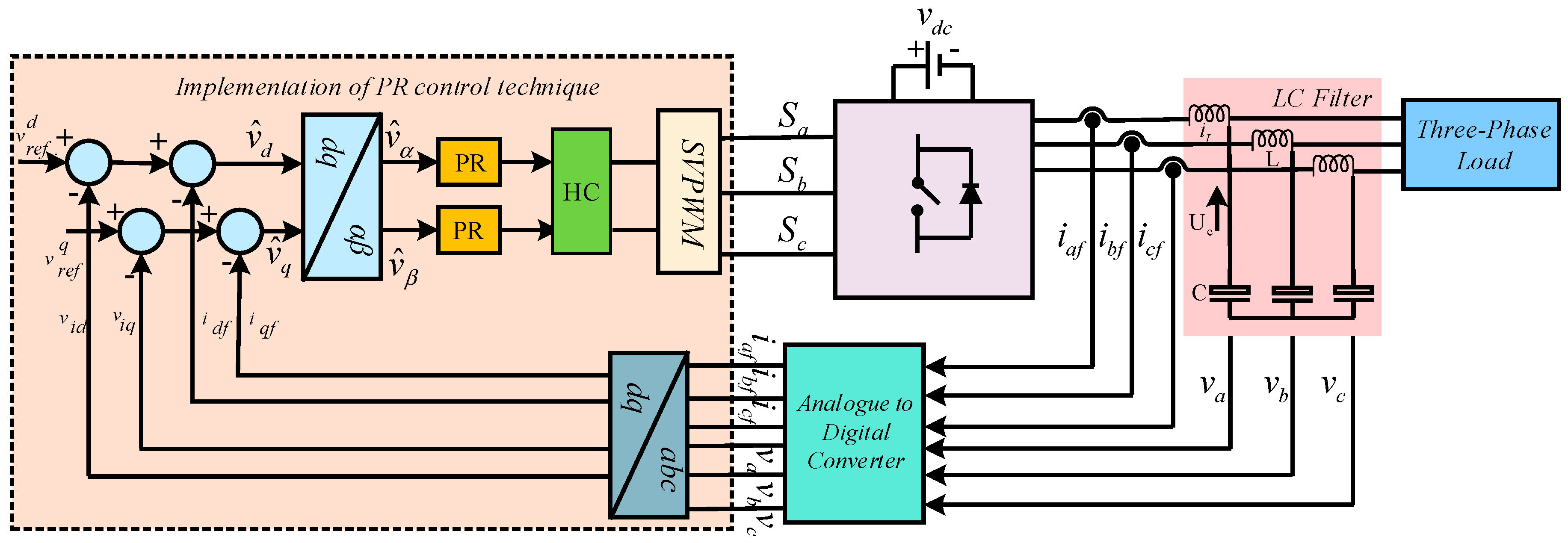
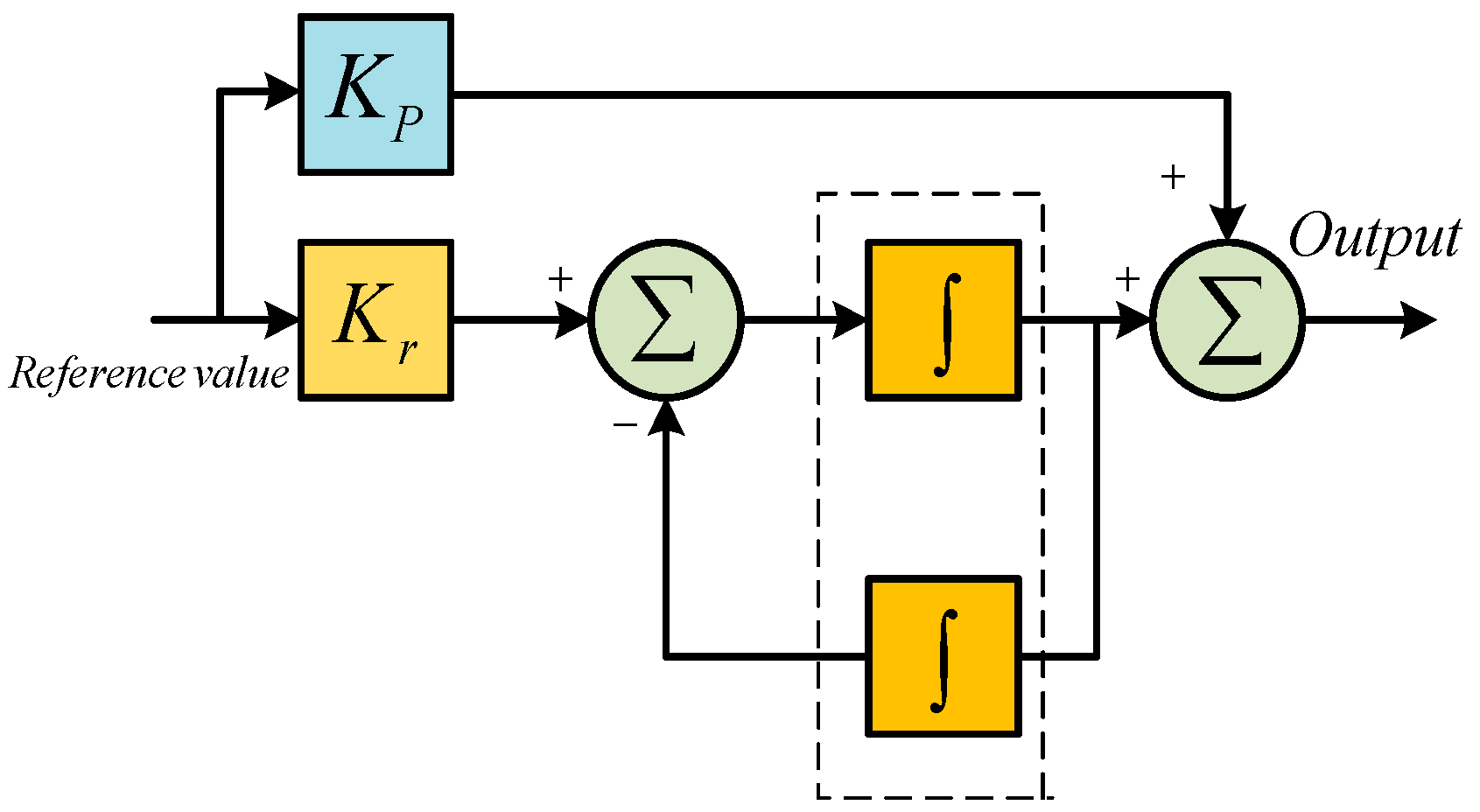
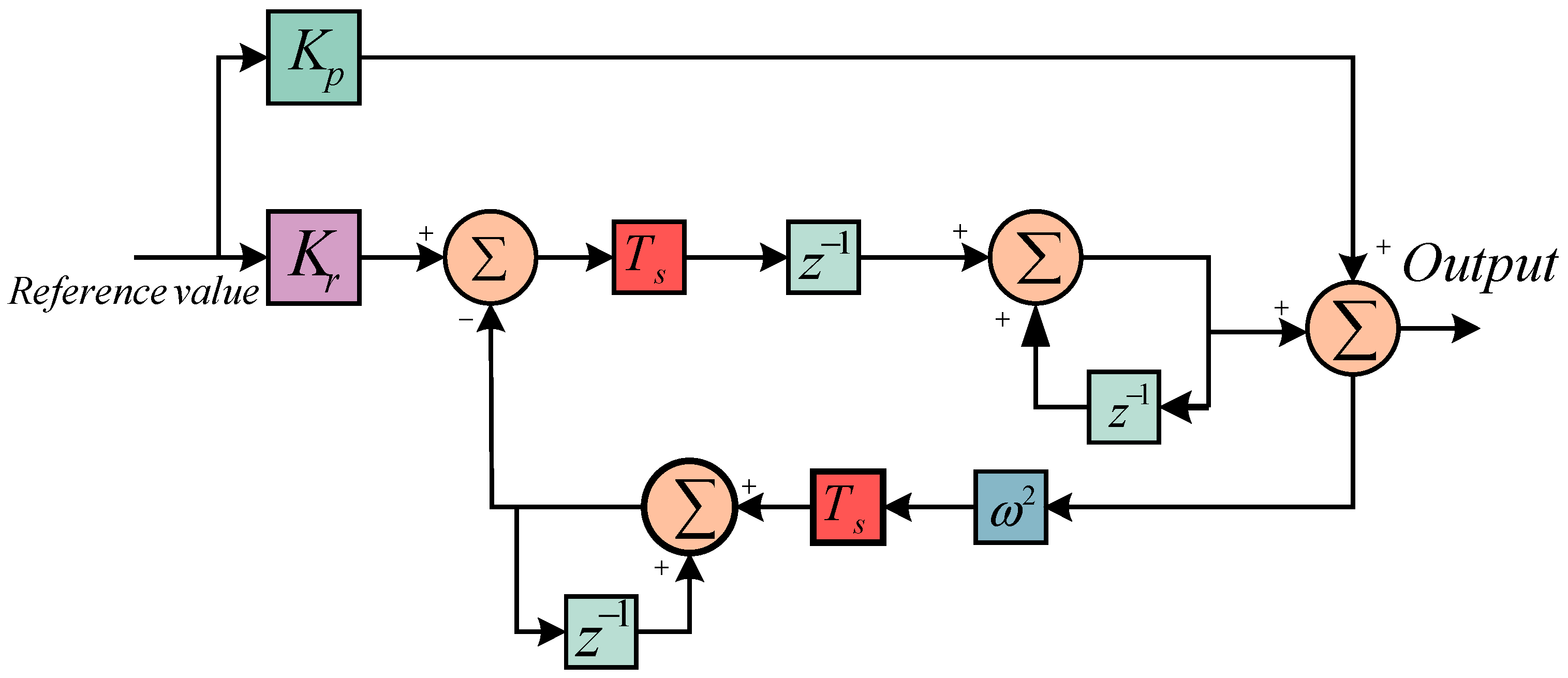
11.2. PR Controllers
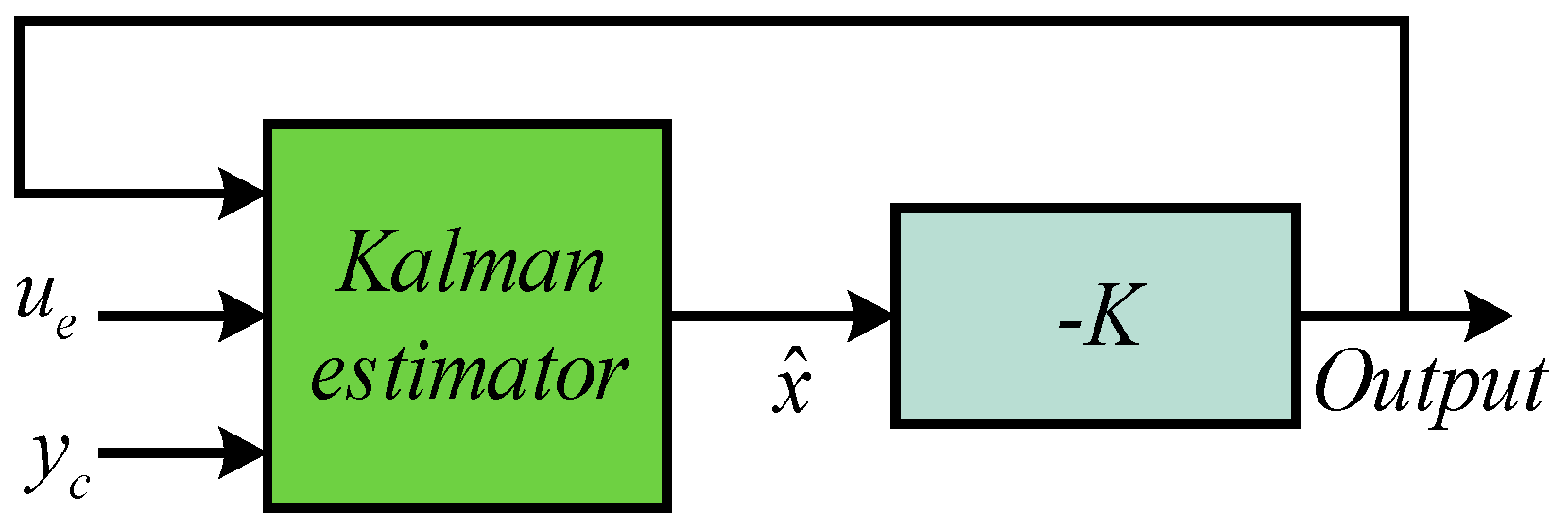
11.3. LQG Control Technique
11.3.1. Linear Quadratic Regulator
11.3.2. Linear Quadratic Integrator
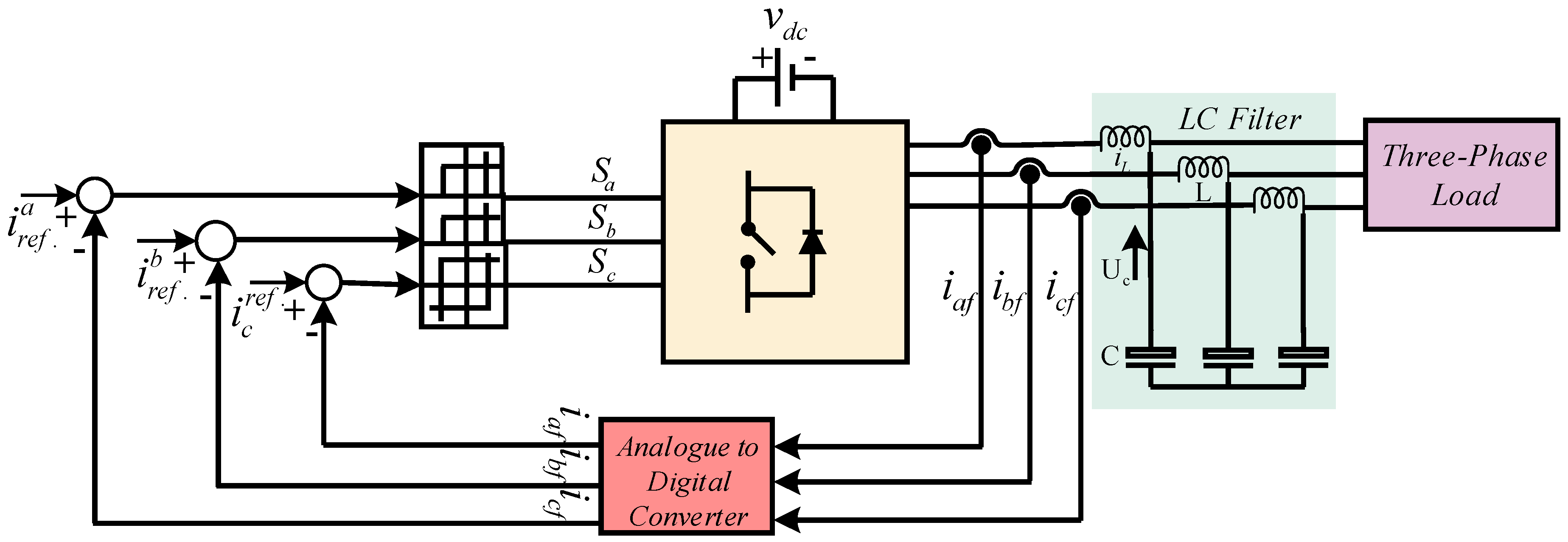
11.4. Hysteresis Control Technique
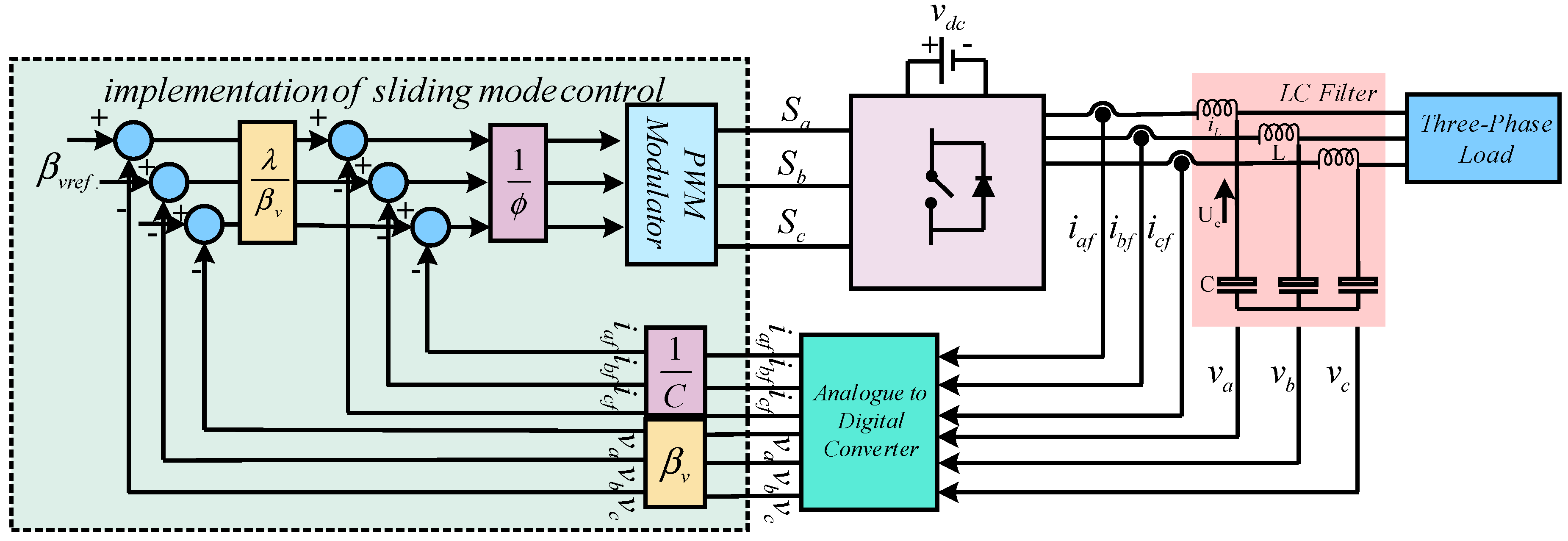
11.5. Sliding Mode Control
11.6. Partial Feedback Controllers
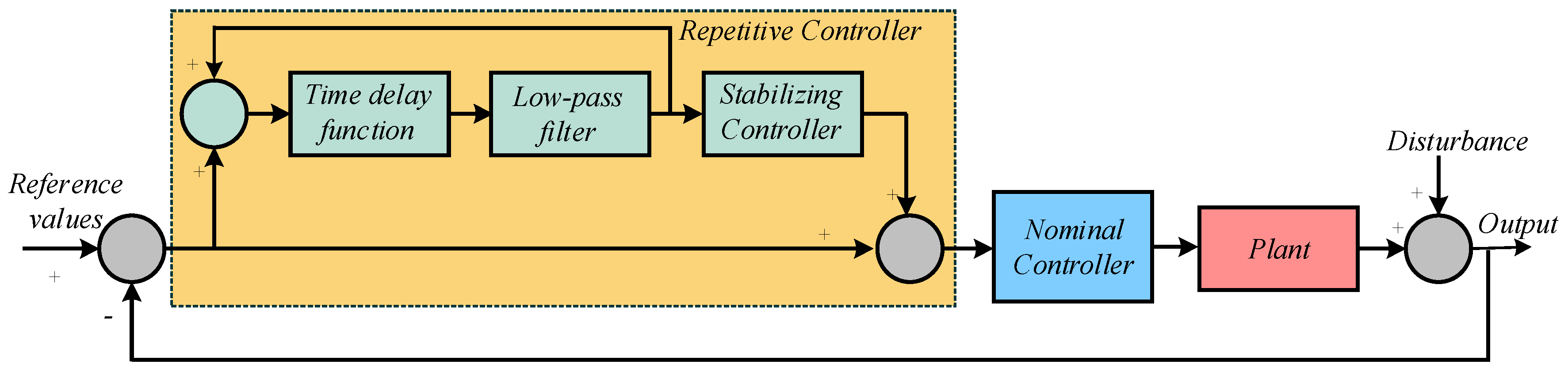
11.7. Repetitive Control
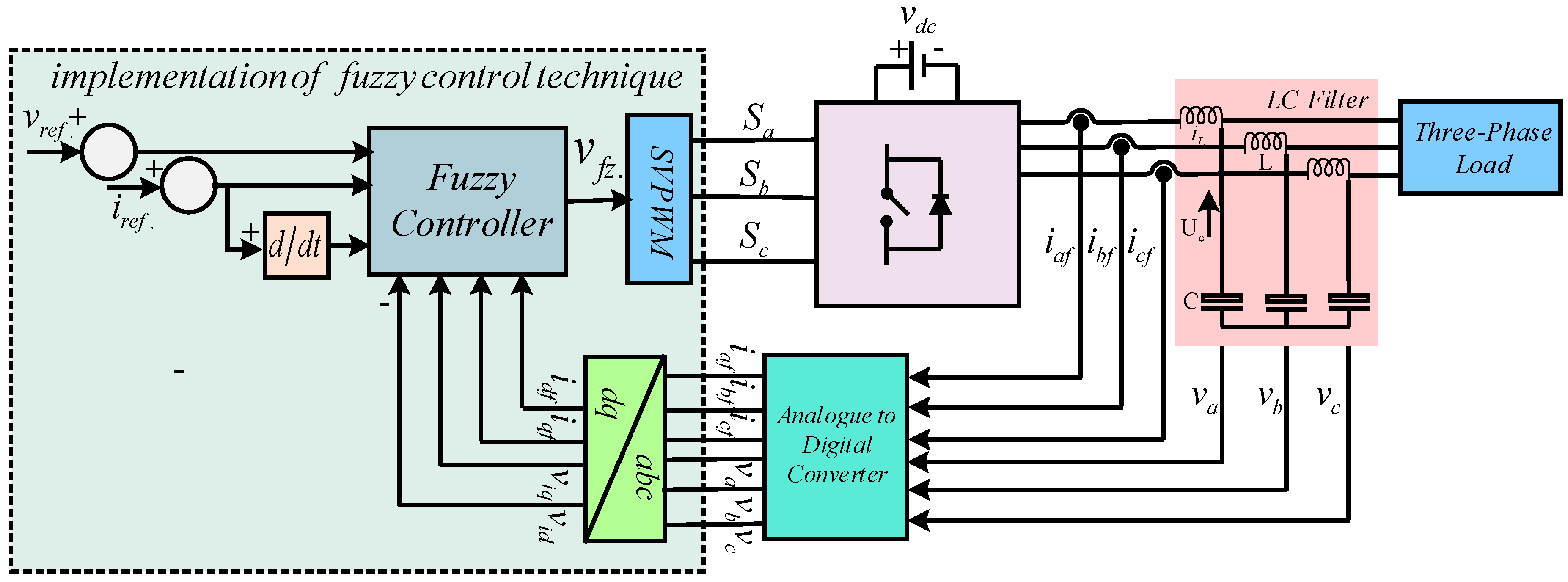
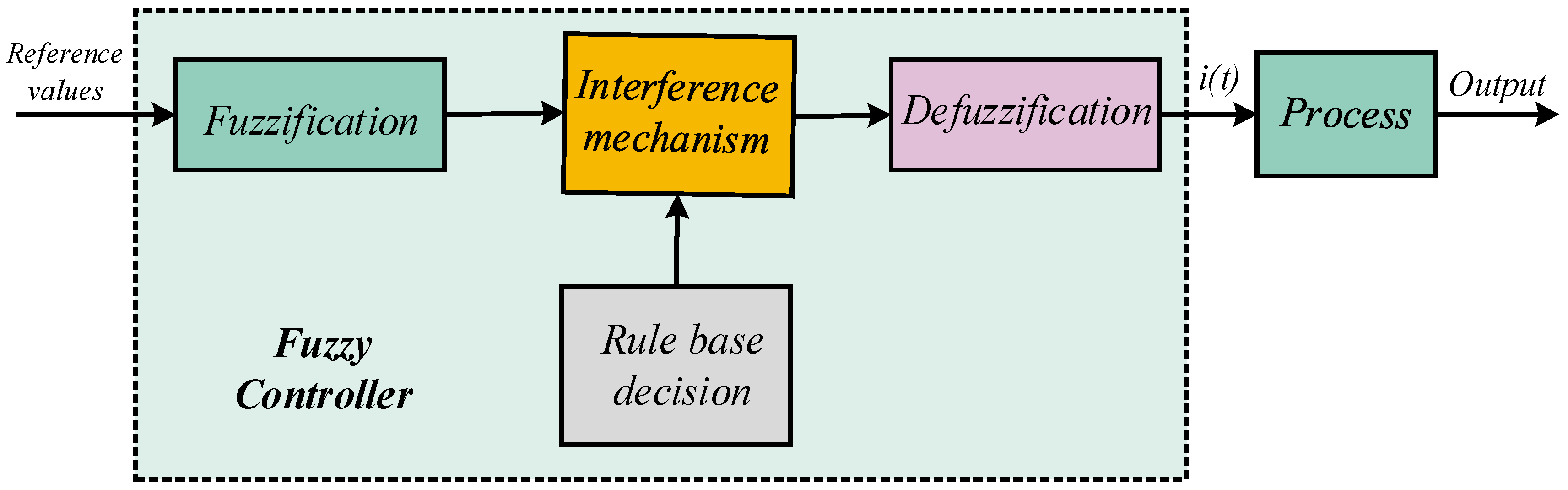
11.7.1. Fuzzy Control
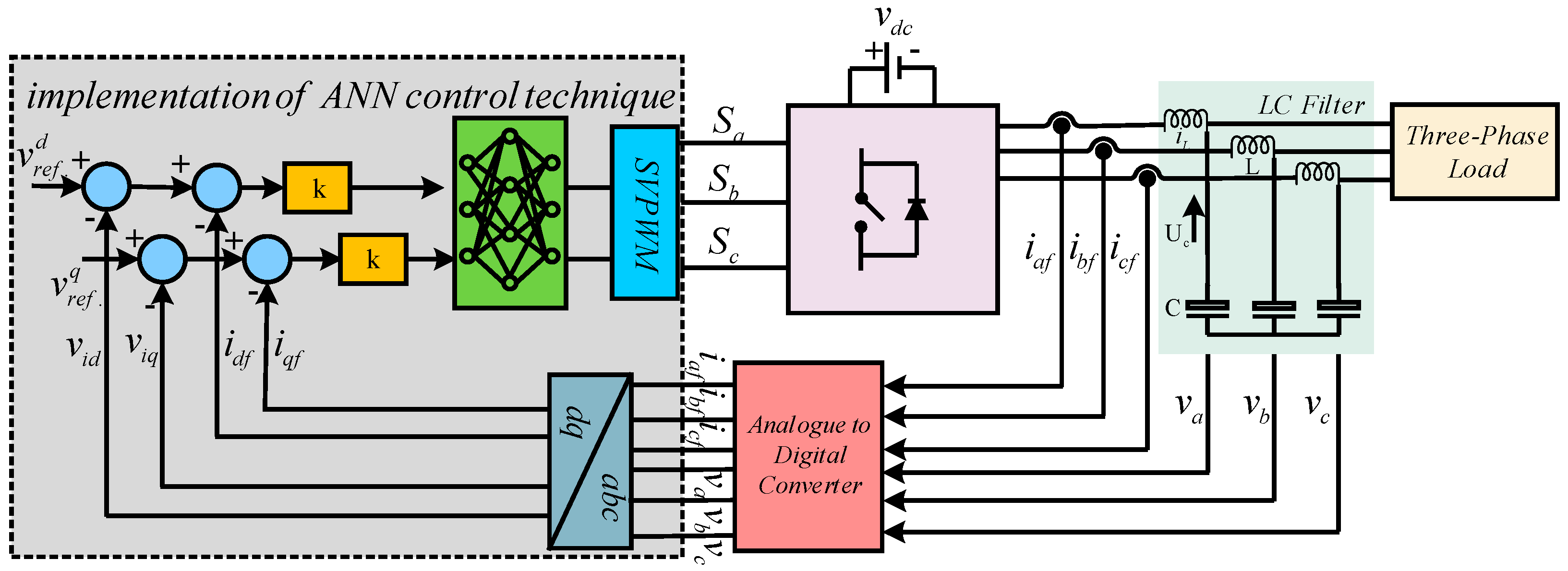
11.7.2. Artificial Neural Network Control
11.8. Robust Controllers
11.8.1. H-Infinity Controllers
11.8.2. μ-Synthesis Controllers
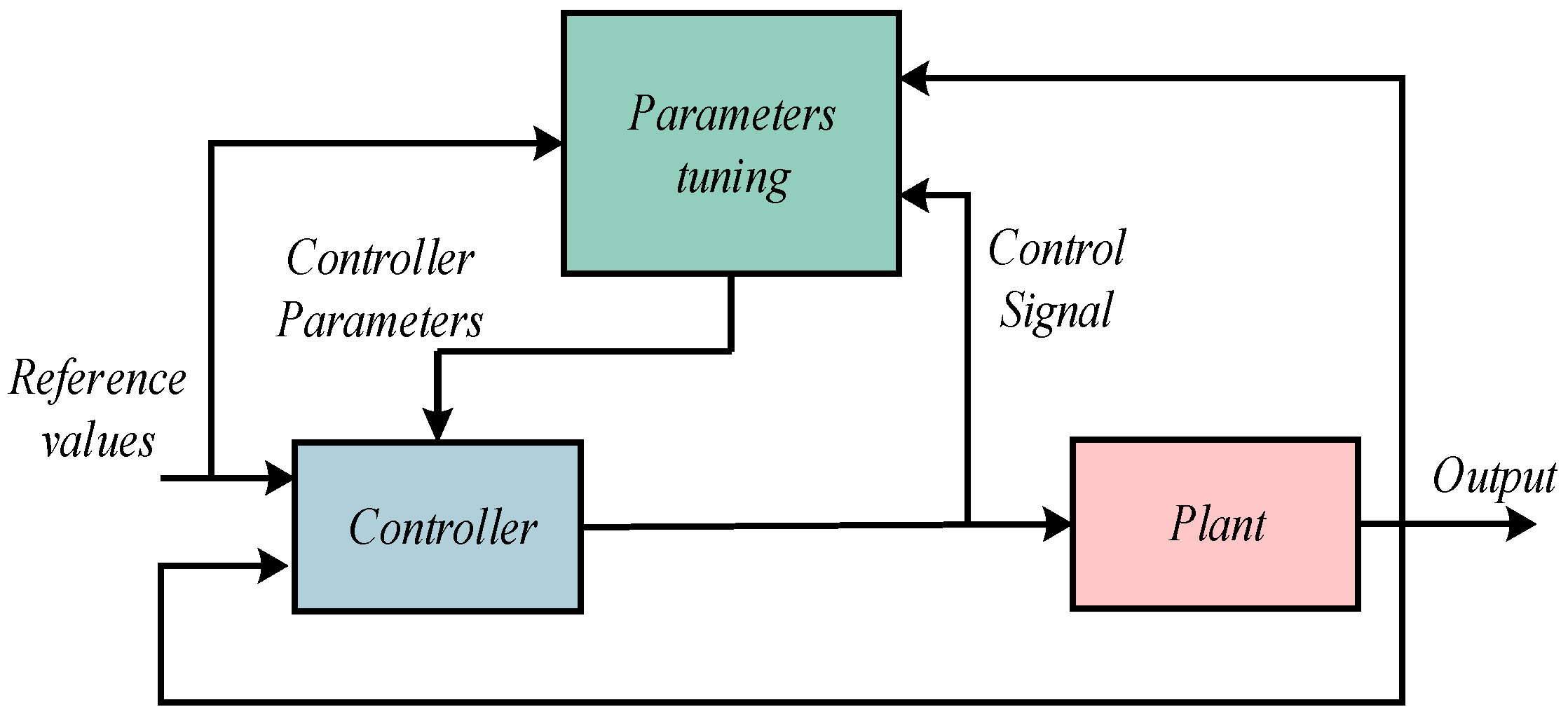
11.9. Adaptive Controllers
11.10. Predictive Controllers
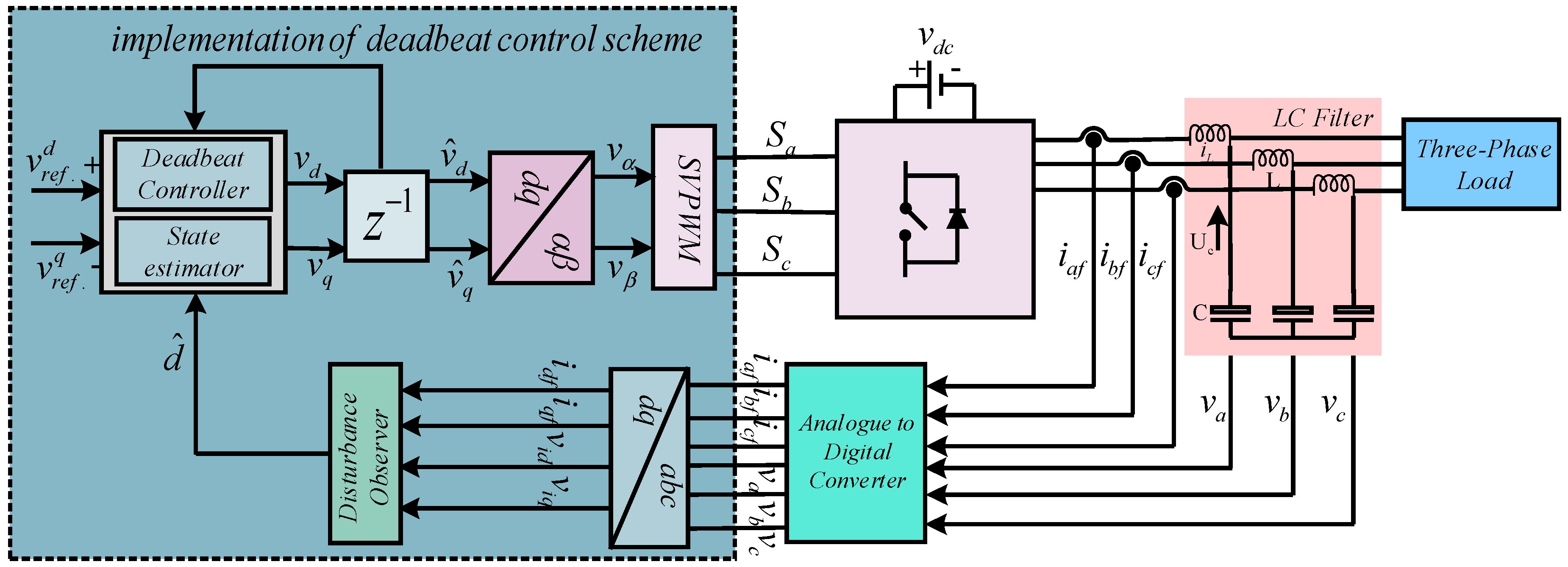
11.10.1. Deadbeat Control
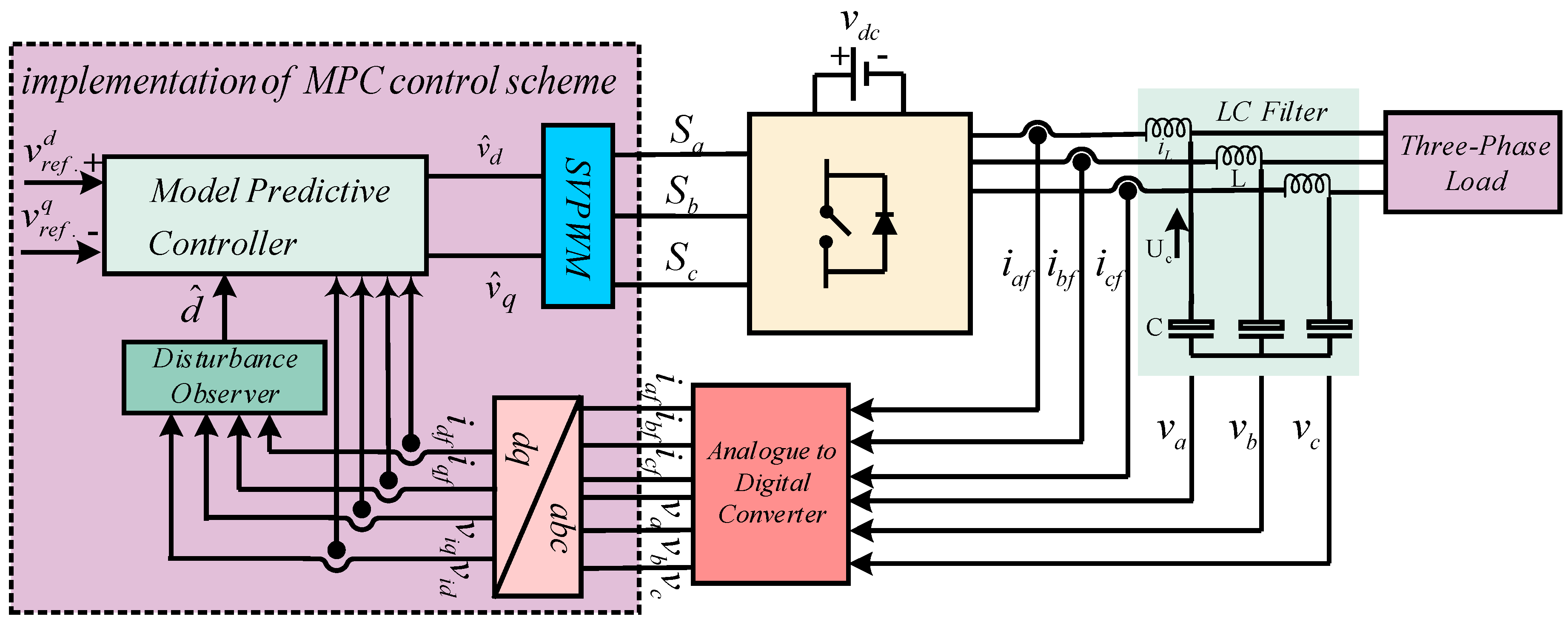
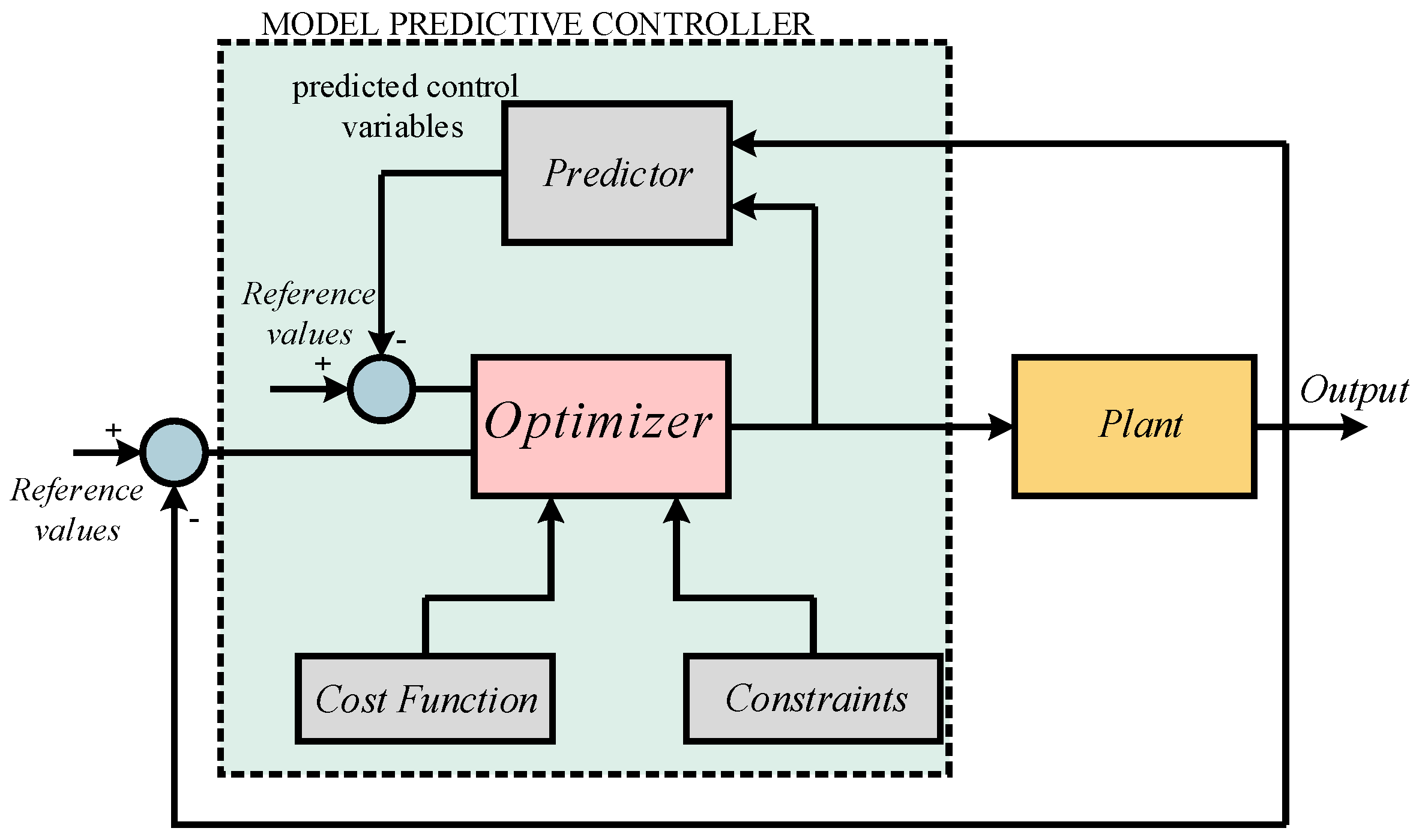
11.10.2. Model Predictive Control
11.11. Iterative Learning Scheme
12. Comparative Analysis and Future Research Goals
13. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- European Commission Directorate-General for Energy. DG ENER Work in the Paper—The Future Role and Challenges of Energy Storage; European Commission Directorate-General for Energy: Brussel, Belgium, 2013. [Google Scholar]
- Loh, P.C.; Newman, M.J.; Zmood, D.N.; Holmes, D.G. A comparative analysis of multiloop voltage regulation strategies for single and three-phase UPS systems. IEEE Trans. Power Electron. 2003, 18, 1176–1185. [Google Scholar]
- Kassakian, J.G.; Schlecht, M.F.; Verghese, G.C. Principles of Power Electronics; Addison-Wesley: Reading, PA, USA, 1991; Volume 1991. [Google Scholar]
- Mohan, N.; Undeland, T.M. Power Electronics: Converters, Applications, and Design; John Wiley & Sons: New Delhi, India, 2007. [Google Scholar]
- Abdel-Rahim, N.M.; Quaicoe, J.E. Analysis and design of a multiple feedback loop control strategy for single-phase voltage-source UPS inverters. IEEE Trans. Power Electron. 1996, 11, 532–541. [Google Scholar] [CrossRef]
- Lee, T.-S.; Chiang, S.-J.; Chang, J.-M. H/sub/spl infin//loop-shaping controller designs for the single-phase UPS inverters. IEEE Trans. Power Electron. 2001, 16, 473–481. [Google Scholar]
- Willmann, G.; Coutinho, D.F.; Pereira, L.F.A.; Libano, F.B. Multiple-loop H-infinity control design for uninterruptible power supplies. IEEE Trans. Ind. Electron. 2007, 54, 1591–1602. [Google Scholar] [CrossRef]
- Kawabata, T.; Miyashita, T.; Yamamoto, Y. Dead beat control of three phase PWM inverter. IEEE Trans. Power Electron. 1990, 5, 21–28. [Google Scholar] [CrossRef]
- Ito, Y.; Kawauchi, S. Microprocessor based robust digital control for UPS with three-phase PWM inverter. IEEE Trans. Power Electron. 1995, 10, 196–204. [Google Scholar] [CrossRef]
- Cho, J.-S.; Lee, S.-Y.; Mok, H.-S.; Choe, G.-H. Modified deadbeat digital controller for UPS with 3-phase PWM inverter. In Proceedings of the Thirty-Fourth IAS Annual Meeting, Conference Record of the 1999 IEEE Industry Applications Conference, Phoenix, AZ, USA, 3–7 October 1999; Volume 4. [Google Scholar]
- Lee, T.S.; Tzeng, K.S.; Chong, M.S. Robust controller design for a single-phase UPS inverter using μ-synthesis. IEE Proc. Electr. Power Appl. 2004, 151, 334–340. [Google Scholar] [CrossRef]
- Tahir, S.; Wang, J.; Kaloi, S.G.; Hussain, M. Robust digital deadbeat control design technique for 3 phase VSI with disturbance observer. IEICE Electron. Express 2017, 14, 20170351. [Google Scholar] [CrossRef]
- Jung, J.-W.; Vu, N.T.-T.; Dang, D.Q.; Do, T.D.; Choi, Y.S.; Choi, H.H. A three-phase inverter for a standalone distributed generation system: Adaptive voltage control design and stability analysis. IEEE Trans. Energy Convers. 2014, 29, 46–56. [Google Scholar] [CrossRef]
- Bogosyan, S. Recent advances in renewable energy employment. IEEE Ind. Electron. Mag. 2009, 3, 54–55. [Google Scholar] [CrossRef]
- Liserre, M.; Sauter, T.; Hung, J.H. Future energy systems: Integrating renewable energy sources into the smart power grid through industrial electronics. IEEE Ind. Electron. Mag. 2010, 4, 18–37. [Google Scholar] [CrossRef]
- Kim, M.-Y.; Song, Y.-U.; Kim, K.-H. The advanced voltage regulation method for ULTC in distribution systems with DG. J. Electr. Eng. Technol. 2013, 8, 737–743. [Google Scholar] [CrossRef]
- Mokhtarpour, A.; Shayanfar, H.; Bathaee, S.M.T.; Banaei, M.R. Control of a single phase unified power quality conditioner-distributed generation-based input output feedback linearization. J. Electr. Eng. Technol. 2013, 8, 1352–1364. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W. An enhanced microgrid load demand sharing strategy. IEEE Trans. Power Electron. 2012, 27, 3984–3995. [Google Scholar] [CrossRef]
- Marwali, M.N.; Jung, J.-W.; Keyhani, A. Stability analysis of load sharing control for distributed generation systems. IEEE Trans. Energy Convers. 2007, 22, 737–745. [Google Scholar] [CrossRef]
- Zhang, Y.; Yu, M.; Liu, F.; Kang, Y. Instantaneous current-sharing control strategy for parallel operation of UPS modules using virtual impedance. IEEE Trans. Power Electron. 2013, 28, 432–440. [Google Scholar] [CrossRef]
- Vechiu, I.; Curea, O.; Camblong, H. Transient operation of a four-leg inverter for autonomous applications with unbalanced load. IEEE Trans. Power Electron. 2010, 25, 399–407. [Google Scholar] [CrossRef]
- Kasal, G.K.; Singh, B. Voltage and frequency controllers for an asynchronous generator-based isolated wind energy conversion system. IEEE Trans. Energy Convers. 2011, 26, 402–416. [Google Scholar] [CrossRef]
- Nian, H.; Zeng, R. Improved control strategy for stand-alone distributed generation system under unbalanced and non-linear loads. IET Renew. Power Gener. 2011, 5, 323–331. [Google Scholar] [CrossRef]
- Karimi, H.; Nikkhajoei, H.; Iravani, R. Control of an electronically-coupled distributed resource unit subsequent to an islanding event. IEEE Trans. Power Deliv. 2008, 23, 493–501. [Google Scholar] [CrossRef]
- Karimi, H.; Yazdani, A.; Iravani, R. Robust control of an autonomous four-wire electronically-coupled distributed generation unit. IEEE Trans. Power Deliv. 2011, 26, 455–466. [Google Scholar] [CrossRef]
- Escobar, G.; Valdez, A.A.; Leyva-Ramos, J.; Mattavelli, P. Repetitive-based controller for a UPS inverter to compensate unbalance and harmonic distortion. IEEE Trans. Ind. Electron. 2007, 54, 504–510. [Google Scholar] [CrossRef]
- Yazdani, A. Control of an islanded distributed energy resource unit with load compensating feed-forward. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008. [Google Scholar]
- Dasgupta, S.; Sahoo, S.K.; Panda, S.K. Single-phase inverter control techniques for interfacing renewable energy sources with microgrid—Part I: Parallel-connected inverter topology with active and reactive power flow control along with grid current shaping. IEEE Trans. Power Electron. 2011, 26, 717–731. [Google Scholar] [CrossRef]
- Dai, M.; Marwali, M.N.; Jung, J.-W.; Keyhani, A. A three-phase four-wire inverter control technique for a single distributed generation unit in island mode. IEEE Trans. Power Electron. 2008, 23, 322–331. [Google Scholar] [CrossRef]
- Delghavi, M.B.; Yazdani, A.N. Islanded-mode control of electronically coupled distributed-resource units under unbalanced and nonlinear load conditions. IEEE Trans. Power Deliv. 2011, 26, 661–673. [Google Scholar] [CrossRef]
- Delghavi, M.B.; Yazdani, A.N. An adaptive feedforward compensation for stability enhancement in droop-controlled inverter-based microgrids. IEEE Trans. Power Deliv. 2011, 26, 1764–1773. [Google Scholar] [CrossRef]
- Prodanovic, M.; Timothy, C.; Green, T.C. Control and filter design of three-phase inverters for high power quality grid connection. IEEE Trans. Power Electron. 2003, 18, 373–380. [Google Scholar] [CrossRef]
- Mattavelli, P.; Escobar, G.; Stankovic, A.M. Dissipativity-based adaptive and robust control of UPS. IEEE Trans. Ind. Electron. 2001, 48, 334–343. [Google Scholar] [CrossRef]
- Valderrama, G.E.; Stankovic, A.M.; Mattavelli, P. Dissipativity-based adaptive and robust control of UPS in unbalanced operation. IEEE Trans. Power Electron. 2003, 18, 1056–1062. [Google Scholar] [CrossRef]
- Escobar, G.; Mattavelli, P.; Stankovic, A.M.; Valdez, A.A.; Leyva-Ramos, J. An adaptive control for UPS to compensate unbalance and harmonic distortion using a combined capacitor/load current sensing. IEEE Trans. Ind. Electron. 2007, 54, 839–847. [Google Scholar] [CrossRef]
- Do, T.D.; Leu, V.Q.; Choi, Y.-S.; Choi, H.H.; Jung, J.-W. An adaptive voltage control strategy of three-phase inverter for stand-alone distributed generation systems. IEEE Trans. Ind. Electron. 2013, 60, 5660–5672. [Google Scholar] [CrossRef]
- Rasheduzzaman, M.; Mueller, J.; Kimball, J.W. Small-signal modeling of a three-phase isolated inverter with both voltage and frequency droop control. In Proceedings of the 2014 Twenty-Ninth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 16–20 March 2014. [Google Scholar]
- Rodriguez, J.; Lai, J.-S.; Peng, F.Z. Multilevel inverters: A survey of topologies, controls, and applications. IEEE Trans. Ind. Electron. 2002, 49, 724–738. [Google Scholar] [CrossRef]
- Nabae, A.; Takahashi, I.; Akagi, H. A new neutral-point-clamped PWM inverter. IEEE Trans. Ind. Appl. 1981, 5, 518–523. [Google Scholar] [CrossRef]
- Franquelo, L.G.; Rodriguez, J.; Leon, J.I.; Kouro, S.; Portillo, R.; Prats, M.A.M. The age of multilevel converters arrives. IEEE Ind. Electron. Mag. 2008, 2, 28–39. [Google Scholar] [CrossRef]
- Lai, J.-S.; Peng, F.Z. Multilevel converters—A new breed of power converters. IEEE Trans. Ind. Appl. 1996, 32, 509–517. [Google Scholar]
- Patel, H.S.; Hoft, R.G. Generalized techniques of harmonic elimination and voltage control in thyristor inverters: Part I—Harmonic elimination. IEEE Trans. Ind. Appl. 1973, 3, 310–317. [Google Scholar] [CrossRef]
- Khomfoi, S.; Tolbert, L.M. Multilevel power converters. In Power Electronics Handbook; Elsevier/Academic Press: Burlington, VT, USA, 2007; pp. 451–482. [Google Scholar]
- Zhang, R.; Prasad, V.H.; Boroyevich, D.; Lee, F.C. Three-dimensional space vector modulation for four-leg voltage-source converters. IEEE Trans. Power Electron. 2002, 17, 314–326. [Google Scholar] [CrossRef]
- Lohia, P.; Mishra, M.K.; Karthikeyan, K.; Vasudevan, K. A minimally switched control algorithm forthree-phase four-leg VSI topology tocompensate unbalanced and nonlinear load. IEEE Trans. Power Electron. 2008, 23, 1935–1944. [Google Scholar] [CrossRef]
- Zhong, Q.-C.; Liang, J.; Weiss, G.; Feng, C.M.; Green, T.C. H∞ Control of the Neutral Point in Four-Wire Three-Phase DC–AC Converters. IEEE Trans. Ind. Electron. 2006, 53, 1594–1602. [Google Scholar] [CrossRef]
- Liang, J.; Green, T.C.; Feng, C.; Weiss, C. Increasing voltage utilization in split-link, four-wire inverters. IEEE Trans. Power Electron. 2009, 24, 1562–1569. [Google Scholar] [CrossRef]
- Miret, J.; Camacho, A.; Castilla, M.; de Vicuña, L.G.; Matas, J. Control scheme with voltage support capability for distributed generation inverters under voltage sags. IEEE Trans. Power Electron. 2013, 28, 5252–5262. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J.; Zhao, Y. A unified control strategy for three-phase inverter in distributed generation. IEEE Trans. Power Electron. 2014, 29, 1176–1191. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, S.; Cintron-Rivera, J.G.; Peng, F.Z. Modeling and control of quasi-Z-source inverter for distributed generation applications. IEEE Trans. Ind. Electron. 2013, 60, 1532–1541. [Google Scholar] [CrossRef]
- Ebadi, M.; Joorabian, M.; Moghani, J.S. Voltage look-up table method to control multilevel cascaded transformerless inverters with unequal DC rail voltages. IET Power Electron. 2014, 7, 2300–2309. [Google Scholar] [CrossRef]
- Eren, S.; Pahlevani, M.; Bakhshai, A.; Jain, P. An adaptive droop DC-bus voltage controller for a grid-connected voltage source inverter with LCL filter. IEEE Trans. Power Electron. 2015, 30, 547–560. [Google Scholar] [CrossRef]
- Abu-Rub, H.; Guzinski, J.; Krzeminski, Z.; Toliyat, H.A. Predictive current control of voltage-source inverters. IEEE Trans. Ind. Electron. 2004, 51, 585–593. [Google Scholar] [CrossRef]
- Espi, J.M.; Castello, J.; Garcia-Gil, R.; Garcera, G.; Figueres, E. An adaptive robust predictive current control for three-phase grid-connected inverters. IEEE Trans. Ind. Electron. 2011, 58, 3537–3546. [Google Scholar] [CrossRef]
- Moreno, J.C.; Espi Huerta, J.M.; Gil, R.G.; Gonzalez, S.A. A robust predictive current control for three-phase grid-connected inverters. IEEE Trans. Ind. Electron. 2009, 56, 1993–2004. [Google Scholar] [CrossRef]
- Ahmed, K.H.; Massoud, A.M.; Finney, S.J.; Williams, B.W. A modified stationary reference frame-based predictive current control with zero steady-state error for LCL coupled inverter-based distributed generation systems. IEEE Trans. Ind. Electron. 2011, 58, 1359–1370. [Google Scholar] [CrossRef]
- Miveh, M.R.; Rahmat, M.F.; Ghadimi, A.A.; Mustafa, M.W. Control techniques for three-phase four-leg voltage source inverters in autonomous microgrids: A review. Renew. Sustain. Energy Rev. 2016, 54, 1592–1610. [Google Scholar] [CrossRef]
- Chen, H. Research on the control strategy of VSC based HVDC system supplying passive network. In Proceedings of the 2009 PES’09 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009. [Google Scholar]
- Qian, C.; Tang, G.; Hu, M. Steady-state model and controller design of a VSC-HVDC converter based on dq0-axis. Autom. Electr. Power Syst. 2004, 16, 015. [Google Scholar]
- Hoffmann, N.; Fuchs, F.W.; Dannehl, J. Models and effects of different updating and sampling concepts to the control of grid-connected PWM converters—A study based on discrete time domain analysis. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications (EPE 2011), Birmingham, UK, 30 August–1 September 2011. [Google Scholar]
- Büyük, M.; Tan, A.; Tümay, M.; Bayındır, K.Ç. Topologies, generalized designs, passive and active damping methods of switching ripple filters for voltage source inverter: A comprehensive review. Renew. Sustain. Energy Rev. 2016, 62, 46–69. [Google Scholar] [CrossRef]
- Peña-Alzola, R.; Liserre, M.; Blaabjerg, F.; Ordonez, M.; Yang, Y. LCL-filter design for robust active damping in grid-connected converters. IEEE Trans. Ind. Inform. 2014, 10, 2192–2203. [Google Scholar] [CrossRef]
- Zhang, C.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Resonance damping techniques for grid-connected voltage source converters with LCL filters—A review. In Proceedings of the 2014 IEEE International Energy Conference (ENERGYCON), Cavtat, Croatia, 13–16 May 2014; pp. 169–176. [Google Scholar]
- Jia, Y.; Zhao, J.; Fu, X. Direct grid current control of LCL-filtered grid-connected inverter mitigating grid voltage disturbance. IEEE Trans. Power Electron. 2014, 29, 1532–1541. [Google Scholar]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley & Sons: Chichester, UK, 2011; Volume 29. [Google Scholar]
- Jalili, K.; Bernet, S. Design of LCL filters of active-front-end two-level voltage-source converters. IEEE Trans. Ind. Electron. 2009, 56, 1674–1689. [Google Scholar] [CrossRef]
- Kazmierkowski, M.P.; Malesani, L. Current control techniques for three-phase voltage-source PWM converters: A survey. IEEE Trans. Ind. Electron. 1998, 45, 691–703. [Google Scholar] [CrossRef]
- Kumar, K.V.; Michael, P.A.; John, J.P.; Kumar, S.S. Simulation and comparison of SPWM and SVPWM control for three phase inverter. ARPN J. Eng. Appl. Sci. 2010, 5, 61–74. [Google Scholar]
- Lim, J.S.; Park, C.; Han, J.; Lee, Y.I. Robust tracking control of a three-phase DC–AC inverter for UPS applications. IEEE Trans. Ind. Electron. 2014, 61, 4142–4151. [Google Scholar] [CrossRef]
- Huerta, J.M.E.; Castello, J.; Fischer, J.R.; García-Gil, R. A synchronous reference frame robust predictive current control for three-phase grid-connected inverters. IEEE Trans. Ind. Electron. 2010, 57, 954–962. [Google Scholar] [CrossRef]
- Samui, A.; Samantaray, S.R. New active islanding detection scheme for constant power and constant current controlled inverter-based distributed generation. IET Gener. Transm. Distrib. 2013, 7, 779–789. [Google Scholar] [CrossRef]
- Yuan, X.; Merk, W.; Stemmler, H.; Allmeling, J. Stationary-frame generalized integrators for current control of active power filters with zero steady-state error for current harmonics of concern under unbalanced and distorted operating conditions. IEEE Trans. Ind. Appl. 2002, 38, 523–532. [Google Scholar] [CrossRef]
- Miret, J.; Castilla, M.; Matas, J.; Guerrero, J.M.; Vasquez, J.C. Selective harmonic-compensation control for single-phase active power filter with high harmonic rejection. IEEE Trans. Ind. Electron. 2009, 56, 3117–3127. [Google Scholar] [CrossRef]
- Beza, M.; Bongiorno, M. Improved discrete current controller for grid-connected voltage source converters in distorted grids. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012. [Google Scholar]
- Kandil, M.S.; El-Saadawi, M.M.; Hassan, A.E.; Abo-Al-Ez, K.M. A proposed reactive power controller for DG grid connected systems. In Proceedings of the 2010 IEEE International Energy Conference and Exhibition, Manama, Bahrain, 18–22 December 2010; pp. 446–451. [Google Scholar]
- Radwan, A.A.A.; Abdel-Rady, I.M.Y. Power Synchronization Control for Grid-Connected Current-Source Inverter-Based Photovoltaic Systems. IEEE Trans. Energy Convers. 2016, 31, 1023–1036. [Google Scholar] [CrossRef]
- Chilipi, R.; Sayari, N.A.; Hosani, K.A.; Beig, A.R. Control scheme for grid-tied distributed generation inverter under unbalanced and distorted utility conditions with power quality ancillary services. IET Renew. Power Gener. 2016, 10, 140–149. [Google Scholar] [CrossRef]
- Busada, C.; Jorge, S.G.; Leon, A.E.; Solsona, J. Phase-locked loop-less current controller for grid-connected photovoltaic systems. IET Renew. Power Gener. 2012, 6, 400–407. [Google Scholar] [CrossRef]
- Athans, M. The role and use of the stochastic linear-quadratic-Gaussian problem in control system design. IEEE Trans. Autom. Control 1971, 16, 529–552. [Google Scholar] [CrossRef]
- Huerta, F.; Pizarro, D.; Cobreces, S.; Rodriguez, F.J.; Giron, C.; Rodriguez, A. LQG servo controller for the current control of LCL grid-connected voltage-source converters. IEEE Trans. Ind. Electron. 2012, 59, 4272–4284. [Google Scholar] [CrossRef]
- Hossain, M.A.; Azim, M.I.; Mahmud, M.A.; Pota, H.R. Primary voltage control of a single-phase inverter using linear quadratic regulator with integrator. In Proceedings of the 2015 Australasian Universities Power Engineering Conference (AUPEC), Wollongong, Australia, 27–30 September 2015; pp. 1–6. [Google Scholar]
- Ahmed, K.H.; Massoud, A.M.; Finney, S.J.; Williams, B.W. Optimum selection of state feedback variables PWM inverters control. In Proceedings of the IET Conference on Power Electronics, Machines and Drives, York, UK, 2–4 April 2008; pp. 125–129. [Google Scholar]
- Xue, M.; Zhang, Y.; Kang, Y.; Yi, Y.; Li, S.; Liu, F. Full feedforward of grid voltage for discrete state feedback controlled grid-connected inverter with LCL filter. IEEE Trans. Power Electron. 2012, 27, 4234–4247. [Google Scholar] [CrossRef]
- Lalili, D.; Mellit, A.; Lourci, N.; Medjahed, B.; Boubakir, C. State feedback control of a three-level grid-connected photovoltaic inverter. In Proceedings of the 2012 9th International Multi-Conference on Systems, Signals and Devices (SSD), Chemnitz, Germany, 20–23 March 2012; pp. 1–6. [Google Scholar]
- Jaen, C.; Pou, J.; Pindado, R.; Sala, V.; Zaragoza, J. A linear-quadratic regulator with integral action applied to PWM DC-DC converters. In Proceedings of the IECON 2006-32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006; pp. 2280–2285. [Google Scholar]
- Bose, B.K. Power Electronics and Motor Drives: Advances and Trends; Academic Press: Oxford, UK, 2010. [Google Scholar]
- Kaźmierkowski, M.P.; Krishnan, R.; Blaabjerg, F. (Eds.) Control in Power Electronics: Selected Problems; Academic Press: New York, NY, USA, 2002. [Google Scholar]
- Shukla, A.; Ghosh, A.; Joshi, A. Hysteresis modulation of multilevel inverters. IEEE Trans. Power Electron. 2011, 26, 1396–1409. [Google Scholar] [CrossRef]
- Prabhakar, N.; Mishra, M.K. Dynamic hysteresis current control to minimize switching for three-phase four-leg VSI topology to compensate nonlinear load. IEEE Trans. Power Electron. 2010, 25, 1935–1942. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, J.; Li, C. Three-phase four-leg inverter based on voltage hysteresis control. In Proceedings of the 2010 International Conference on Electrical and Control Engineering (ICECE), Wuhan, China, 25–27 June 2010. [Google Scholar]
- Verdelho, P.; Marques, G.D. Four-wire current-regulated PWM voltage converter. IEEE Trans. Ind. Electron. 1998, 45, 761–770. [Google Scholar] [CrossRef]
- Ali, S.M.; Kazmierkowski, M.P. Current regulation of four-leg PWM/VSI. In Proceedings of the 1998 IECON’98 24th Annual Conference of the IEEE Industrial Electronics Society, Aachen, Germany, 31 August–4 September 1998; Volume 3. [Google Scholar]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons: Chichester, UK, 2012; Volume 40. [Google Scholar]
- Wu, B.; Narimani, M. High-Power Converters and AC Drives; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Martins, C.A.; Roboam, X.; Meynard, T.A.; Carvalho, A.S. Switching frequency imposition and ripple reduction in DTC drives by using a multilevel converter. IEEE Trans. Power Electron. 2002, 17, 286–297. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, Z.Q. Investigation on switching patterns of direct power control strategies for grid-connected DC–AC converters based on power variation rates. IEEE Trans. Power Electron. 2011, 26, 3582–3598. [Google Scholar] [CrossRef]
- Bouafia, A.; Gaubert, J.-P.; Krim, F. Predictive direct power control of three-phase pulsewidth modulation (PWM) rectifier using space-vector modulation (SVM). IEEE Trans. Power Electron. 2010, 25, 228–236. [Google Scholar] [CrossRef]
- Kazmierkowski, M.P.; Jasinski, M.; Wrona, G. DSP-based control of grid-connected power converters operating under grid distortions. IEEE Trans. Ind. Inform. 2011, 7, 204–211. [Google Scholar] [CrossRef]
- Hung, J.Y.; Gao, W.; Hung, J.C. Variable structure control: A survey. IEEE Trans. Ind. Electron. 1993, 40, 2–22. [Google Scholar] [CrossRef]
- Tsang, K.M.; Chan, W.L. Adaptive control of power factor correction converter using nonlinear system identification. IEE Proc. Electr. Power Appl. 2005, 152, 627–633. [Google Scholar] [CrossRef]
- Massing, J.R.; Stefanello, M.; Grundling, H.A.; Pinheiro, H. Adaptive current control for grid-connected converters with LCL filter. IEEE Trans. Ind. Electron. 2012, 59, 4681–4693. [Google Scholar] [CrossRef]
- Herran, M.A.; Fischer, J.R.; Gonzalez, S.A.; Judewicz, M.G.; Carrica, D.O. Adaptive dead-time compensation for grid-connected PWM inverters of single-stage PV systems. IEEE Trans. Power Electron. 2013, 28, 2816–2825. [Google Scholar] [CrossRef]
- Mohamed, Y.A.-R.I. Mitigation of converter-grid resonance, grid-induced distortion, and parametric instabilities in converter-based distributed generation. IEEE Trans. Power Electron. 2011, 26, 983–996. [Google Scholar] [CrossRef]
- Athari, H.; Niroomand, M.; Ataei, M. Review and Classification of Control Systems in Grid-tied Inverters. Renew. Sustain. Energy Rev. 2017, 72, 1167–1176. [Google Scholar] [CrossRef]
- Niroomand, M.; Karshenas, H.R. Hybrid learning control strategy for three-phase uninterruptible power supply. IET Power Electron. 2011, 4, 799–807. [Google Scholar] [CrossRef]
- Mahmud, M.A.; Hossain, M.J.; Pota, H.R.; Roy, N.K. Robust nonlinear controller design for three-phase grid-connected photovoltaic systems under structured uncertainties. IEEE Trans. Power Deliv. 2014, 29, 1221–1230. [Google Scholar] [CrossRef]
- Baloch, M.H.; Wang, J.; Kaloi, G.S. Dynamic Modeling and Control of Wind Turbine Scheme Based on Cage Generator for Power System Stability Studies. Int. J. Renew. Energy Res. 2016, 6, 599–606. [Google Scholar]
- Baloch, M.H.; Wang, J.; Kaloi, G.S. Stability and nonlinear controller analysis of wind energy conversion system with random wind speed. Int. J. Electr. Power Energy Syst. 2016, 79, 75–83. [Google Scholar] [CrossRef]
- Baloch, M.H.; Wang, J.; Kaloi, G.S. A Review of the State of the Art Control Techniques for Wind Energy Conversion System. Int. J. Renew. Energy Res. 2016, 6, 1276–1295. [Google Scholar]
- Hornik, T.; Zhong, Q.-C. A Current-Control Strategy for Voltage-Source Inverters in Microgrids Based on H∞ and Repetitive Control. IEEE Trans. Power Electron. 2011, 26, 943–952. [Google Scholar] [CrossRef]
- Hornik, T.; Zhong, Q.-C. H∞ repetitive current controller for grid-connected inverters. In Proceedings of the 2009 IECON’09 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009. [Google Scholar]
- Guo, Q.; Wang, J.; Ma, H. Frequency adaptive repetitive controller for grid-connected inverter with an all-pass infinite impulse response (IIR) filter. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014. [Google Scholar]
- Bose, B.K. Modern Power Electronics and AC Drives; Bose, B.K., Ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Cirstea, M.; Dinu, A.; McCormick, M.; Khor, J.G. Neural and Fuzzy Logic Control of Drives and Power Systems; Elsevier: Oxford, UK, 2002. [Google Scholar]
- Vas, P. Artificial-Intelligence-Based Electrical Machines and Drives: Application of Fuzzy, Neural, Fuzzy-Neural, and Genetic-Algorithm-Based Techniques; Oxford University Press: New York, NY, USA, 1999; Volume 45. [Google Scholar]
- Damen, A.; Weiland, S. Robust Control; Measurement and Control Group Department of Electrical Engineering, Eindhoven University of Technology: Eindhoven, The Netherlands, 2002. [Google Scholar]
- Zames, G. Feedback and optimal sensitivity: Model reference transformations, multiplicative seminorms, and approximate inverses. IEEE Trans. Autom. Control 1981, 26, 301–320. [Google Scholar] [CrossRef]
- Yang, S.; Lei, Q.; Peng, F.Z.; Qian, Z. A robust control scheme for grid-connected voltage-source inverters. IEEE Trans. Ind. Electron. 2011, 58, 202–212. [Google Scholar] [CrossRef]
- Chhabra, M.; Barnes, F. Robust current controller design using mu-synthesis for grid-connected three phase inverter. In Proceedings of the 2014 IEEE 40th Photovoltaic Specialist Conference (PVSC), Denver, CO, USA, 8–13 June 2014. [Google Scholar]
- Chen, S.; Malik, O.P. Power system stabilizer design using/SPL MU/synthesis. IEEE Trans. Energy Convers. 1995, 10, 175–181. [Google Scholar] [CrossRef]
- Mascioli, M.; Pahlevani, M.; Jain, P.K. Frequency-adaptive current controller for grid-connected renewable energy systems. In Proceedings of the 2014 IEEE 36th International Telecommunications Energy Conference (INTELEC), Vancouver, BC, Canada, 28 September–2 October 2014. [Google Scholar]
- Jorge, S.G.; Busada, C.A.; Solsona, J.A. Frequency-adaptive current controller for three-phase grid-connected converters. IEEE Trans. Ind. Electron. 2013, 60, 4169–4177. [Google Scholar] [CrossRef]
- Timbus, A.V.; Ciobotaru, M.; Teodorescu, R.; Blaabjerg, F. Adaptive resonant controller for grid-connected converters in distributed power generation systems. In Proceedings of the 2006 APEC’06. Twenty-First Annual IEEE Applied Power Electronics Conference and Exposition, Dallas, TX, USA, 19–23 March 2006; p. 6. [Google Scholar]
- Zeng, Q.; Chang, L. Improved current controller based on SVPWM for three-phase grid-connected voltage source inverters. In Proceedings of the 2005 PESC’05 36th IEEE Power Electronics Specialists Conference, Recife, Brazil, 16 June 2005. [Google Scholar]
- Ouchen, S.; Betka, A.; Abdeddaim, S.; Menadi, A. Fuzzy-predictive direct power control implementation of a grid connected photovoltaic system, associated with an active power filter. Energy Convers. Manag. 2016, 122, 515–525. [Google Scholar] [CrossRef]
- Ouchen, S.; Abdeddaim, S.; Betka, A.; Menadi, A. Experimental validation of sliding mode-predictive direct power control of a grid connected photovoltaic system, feeding a nonlinear load. Sol. Energy 2016, 137, 328–336. [Google Scholar] [CrossRef]
- Mohamed, Y.A.-R.I.; El-Saadany, E.F. An improved deadbeat current control scheme with a novel adaptive self-tuning load model for a three-phase PWM voltage-source inverter. IEEE Trans. Ind. Electron. 2007, 54, 747–759. [Google Scholar] [CrossRef]
- Bode, G.H.; Loh, P.C.; Newman, M.J.; Holmes, D.G. An improved robust predictive current regulation algorithm. IEEE Trans. Ind. Appl. 2005, 41, 1720–1733. [Google Scholar] [CrossRef]
- Zeng, Q.; Chang, L. An advanced SVPWM-based predictive current controller for three-phase inverters in distributed generation systems. IEEE Trans. Ind. Electron. 2008, 55, 1235–1246. [Google Scholar] [CrossRef]
- Mattavelli, P. An improved deadbeat control for UPS using disturbance observers. IEEE Trans. Ind. Electron. 2005, 52, 206–212. [Google Scholar] [CrossRef]
- Kim, J.; Hong, J.; Kim, H. Improved Direct Deadbeat Voltage Control with an Actively Damped Inductor-Capacitor Plant Model in an Islanded AC Microgrid. Energies 2016, 9, 978. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, W.; Chen, J.; Xu, D. Deadbeat control strategy of circulating currents in parallel connection system of three-phase PWM converter. IEEE Trans. Energy Convers. 2014, 29, 406–417. [Google Scholar]
- Timbus, A.; Liserre, M.; Teodorescu, R.; Rodriguez, P.; Blaabjerg, F. Evaluation of current controllers for distributed power generation systems. IEEE Trans. Power Electron. 2009, 24, 654–664. [Google Scholar] [CrossRef]
- Song, W.; Ma, J.; Zhou, L.; Feng, X. Deadbeat predictive power control of single-phase three-level neutral-point-clamped converters using space-vector modulation for electric railway traction. IEEE Trans. Power Electron. 2016, 31, 721–732. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, J.; Dorrell, D.G. Model predictive control of grid-connected inverters for PV systems with flexible power regulation and switching frequency reduction. IEEE Trans. Ind. Appl. 2015, 51, 587–594. [Google Scholar] [CrossRef]
- Cortés, P.; Kazmierkowski, M.P.; Kennel, R.M.; Quevedo, D.E.; Rodríguez, J. Predictive control in power electronics and drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Mariéthoz, S.; Morari, M. Explicit model-predictive control of a PWM inverter with an LCL filter. IEEE Trans. Ind. Electron. 2009, 56, 389–399. [Google Scholar] [CrossRef]
- Sosa, J.M.; Martinez-Rodriguez, P.R.; Vazquez, G.; Serrano, J.P.; Escobar, G.; Valdez-Fernandez, A.A. Model based controller for an LCL coupling filter for transformerless grid connected inverters in PV applications. In Proceedings of the IECON 2013 39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 1723–1728. [Google Scholar]
- Tan, K.T.; So, P.L.; Chu, Y.C.; Chen, M.Z.Q. Coordinated control and energy management of distributed generation inverters in a microgrid. IEEE Trans. Power Deliv. 2013, 28, 704–713. [Google Scholar] [CrossRef]
- Rodriguez, J.; Pontt, J.; Silva, C.A.; Correa, P.; Lezana, P.; Cortés, P.; Ammann, U. Predictive current control of a voltage source inverter. IEEE Trans. Ind. Electron. 2007, 54, 495–503. [Google Scholar] [CrossRef]
- Tan, K.T.; Peng, X.Y.; So, P.L.; Chu, Y.C.; Chen, M.Z.Q. Centralized control for parallel operation of distributed generation inverters in microgrids. IEEE Trans. Smart Grid 2012, 3, 1977–1987. [Google Scholar] [CrossRef]
- Ayad, A.F.; Kennel, R.M. Model predictive controller for grid-connected photovoltaic based on quasi-Z-source inverter. In Proceedings of the 2013 IEEE International Symposium on Sensorless Control for Electrical Drives and Predictive Control of Electrical Drives and Power Electronics (SLED/PRECEDE), München, Germany, 17–19 October 2013. [Google Scholar]
- Trabelsi, M.; Ghazi, K.A.; Al-Emadi, N.; Ben-Brahim, L. An original controller design for a grid connected PV system. In Proceedings of the IECON 2012 38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 Octorber 2012; pp. 924–929. [Google Scholar]
- Lee, K.-J.; Park, B.-C.; Kim, R.-Y.; Hyun, D.-S. Robust predictive current controller based on a disturbance estimator in a three-phase grid-connected inverter. IEEE Trans. Power Electron. 2012, 27, 276–283. [Google Scholar] [CrossRef]
- Krishna, R.; Kottayil, S.K.; Leijon, M. Predictive current controller for a grid connected three level inverter with reactive power control. In Proceedings of the 2010 IEEE 12th Workshop on Control and Modeling for Power Electronics (COMPEL), Boulder, CO, USA, 28–30 June 2010. [Google Scholar]
- Sathiyanarayanan, T.; Mishra, S. Synchronous reference frame theory based model predictive control for grid connected photovoltaic systems. IFAC-PapersOnLine 2016, 49, 766–771. [Google Scholar] [CrossRef]
- Zeng, Z.; Yang, H.; Zhao, R.; Cheng, C. Topologies and control strategies of multi-functional grid-connected inverters for power quality enhancement: A comprehensive review. Renew. Sustain. Energy Rev. 2013, 24, 223–270. [Google Scholar] [CrossRef]
- Patel, D.C.; Sawant, R.R.; Chandorkar, M.C. Three-dimensional flux vector modulation of four-leg sine-wave output inverters. IEEE Trans. Ind. Electron. 2010, 57, 1261–1269. [Google Scholar] [CrossRef]
- Andishgar, M.H.; Gholipour, E.; Hooshmand, R.-A. An overview of control approaches of inverter-based microgrids in islanding mode of operation. Renew. Sustain. Energy Rev. 2017, 80, 1043–1060. [Google Scholar] [CrossRef]
- Debnath, S.; Qin, J.; Bahrani, B.; Saeedifard, M.; Barbosa, P. Operation, control, and applications of the modular multilevel converter: A review. IEEE Trans. Power Electron. 2015, 30, 37–53. [Google Scholar] [CrossRef]
- Mahmud, M.A.; Pota, H.R.; Hossain, M.J. Nonlinear controller design for single-phase grid-connected photovoltaic systems using partial feedback linearization. In Proceedings of the 2012 2nd Australian Control Conference (AUCC), Sydney, Australia, 15–16 November 2012. [Google Scholar]
- Vas, P.; Stronach, A.F.; Neuroth, M. DSP-controlled intelligent high-performance ac drives present and future. In Proceedings of the IEE Colloquium on Vector Control and Direct Torque Control of Induction Motors, London, UK, 27 October 1995. [Google Scholar]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Cascaded H-Bridge VSI | NP-Diode Clamped VSI | Flying Capacitor VSI | 2L-VSI |
|---|---|---|---|---|
| Design & implementation complexity | High | Low | Medium | Low |
| Specific Requirements | Separate DC sources | Clamping diodes | Additional capacitors | IGBTs/MOSFETs |
| Control Concerns | Power Sharing | Voltage balancing | Voltage Setup | Voltage/current regulation |
| Modularity | High | Low | High | Low |
| Fault tolerance ability | Easy | Difficult | Easy | Easy |
| Reliability | Medium | Medium | Medium-High | High |
| Converter Complexity | Medium | Medium | Low-Medium | High |
| Controller Complexity | Medium-High | Medium-High | Medium-High | Medium |
| Power Quality | Good | Good | Good | Medium |
| Operational Power (MW) | 3–6 | 3–7 | 3–6 | 3 |
| Switching devices | MV-IGBT, IGCT | MV-IGBT, IGCT | MV-IGBT, IGCT | LV-IGBT |
| Predictive Control | Deadbeat Control
|
Trajectory Based control
| |
Hysteresis Based predictive control
| |
Model Predictive Control
|
| Application | Controller | Filter | Ref. Frame | Feedback | Modulation | Ctrl. Parameter | Ref. |
|---|---|---|---|---|---|---|---|
| General | adaptive | LCL | Single Phase | Multi-loop | SPWM | V, I | [51] |
| General | Classic, PR | LCL | Single Phase | Multi-loop | PWM | I | [152] |
| General | Adp., Rpt. | L | Single Phase | Single-loop | SPWM | I | [105] |
| UPS | DB | LC | Single Phase | Multi-loop | PWM | V, I | [153] |
| General | Rpt. | LC | Single-Phase | Single-loop | PWM | V | [101] |
| General | Rpt C | LCL | Single Phase | Single-loop | PWM | I | [104] |
| DG | Classic | LCL | abc, αβ | Single-loop | PWM | V, P | [47] |
| DG | Classic | LC | abc, αβ | Multi-loop | SVPWM | V, I | [48] |
| DG | Classic | LC | abc, αβ | Multi-loop | SPWM | V, I | [49] |
| DG | Classic | L | abc, αβ | Single-loop | VLUT | V | [50] |
| General | DB | L | abc, αβ | Single-loop | PWM | I | [52] |
| APF | Adp., Rpt. | LC | abc, dq | Multi-loop | SVPWM | I | [53] |
| General | DB | LCL | abc, dq | Multi-loop | PWM | I | [54] |
| DG | Adp., MPC | LCL | abc, αβ | Multi-loop | SVPWM | I | [55] |
| General | LQG | LCL | abc, dq | Single-loop | PWM | I | [66] |
| PV | PR, LQG | L | abc, αβ | Single-loop | SVPWM | I | [64] |
| General | Adp. | L | abc, αβ | Multi-loop | PWM | I | [107] |
| UPS | Pred. | LC | abc, dq | Single-loop | SVPWM | V | [109] |
| PV, APF | Pred., Fuzzy | L | abc, αβ | Multi-loop | PWM | P | [108] |
| PV, APF | SMC, Pred. | L | abc, αβ | Multi-loop | PWM | P | [111] |
| General | DB | L | abc, dq | Single-loop | SVPWM | I | [113] |
| General | Adp., DB | L | abc, dq | Single-loop | PWM | I | [112] |
| DG | DB | L | abc, dq | Single-loop | SVPWM | I | [116] |
| UPS | DB, Rpt. | LC | abc, αβ | Single-loop | PWM | V | [115] |
| General | MPC | LCL | abc, abc | Single-loop | PWM | V, I | [122] |
| General | MPC | L | abc, αβ | Single-loop | PWM | I | [125] |
| General | MPC | L | abc, dq | Single-loop | SVPWM | I | [128] |
| PV | MPC | L | abc, dq | Single-loop | SVPWM | I | [130] |
| PV | Classic, Rpt. | L | abc, dq | Single-loop | SVPWM | I | [97] |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tahir, S.; Wang, J.; Baloch, M.H.; Kaloi, G.S. Digital Control Techniques Based on Voltage Source Inverters in Renewable Energy Applications: A Review. Electronics 2018, 7, 18. https://doi.org/10.3390/electronics7020018
Tahir S, Wang J, Baloch MH, Kaloi GS. Digital Control Techniques Based on Voltage Source Inverters in Renewable Energy Applications: A Review. Electronics. 2018; 7(2):18. https://doi.org/10.3390/electronics7020018
Chicago/Turabian StyleTahir, Sohaib, Jie Wang, Mazhar Hussain Baloch, and Ghulam Sarwar Kaloi. 2018. "Digital Control Techniques Based on Voltage Source Inverters in Renewable Energy Applications: A Review" Electronics 7, no. 2: 18. https://doi.org/10.3390/electronics7020018
APA StyleTahir, S., Wang, J., Baloch, M. H., & Kaloi, G. S. (2018). Digital Control Techniques Based on Voltage Source Inverters in Renewable Energy Applications: A Review. Electronics, 7(2), 18. https://doi.org/10.3390/electronics7020018