Virtual Machine Placement via Bin Packing in Cloud Data Centers

 , ,
, ,  ,
,
Abstract
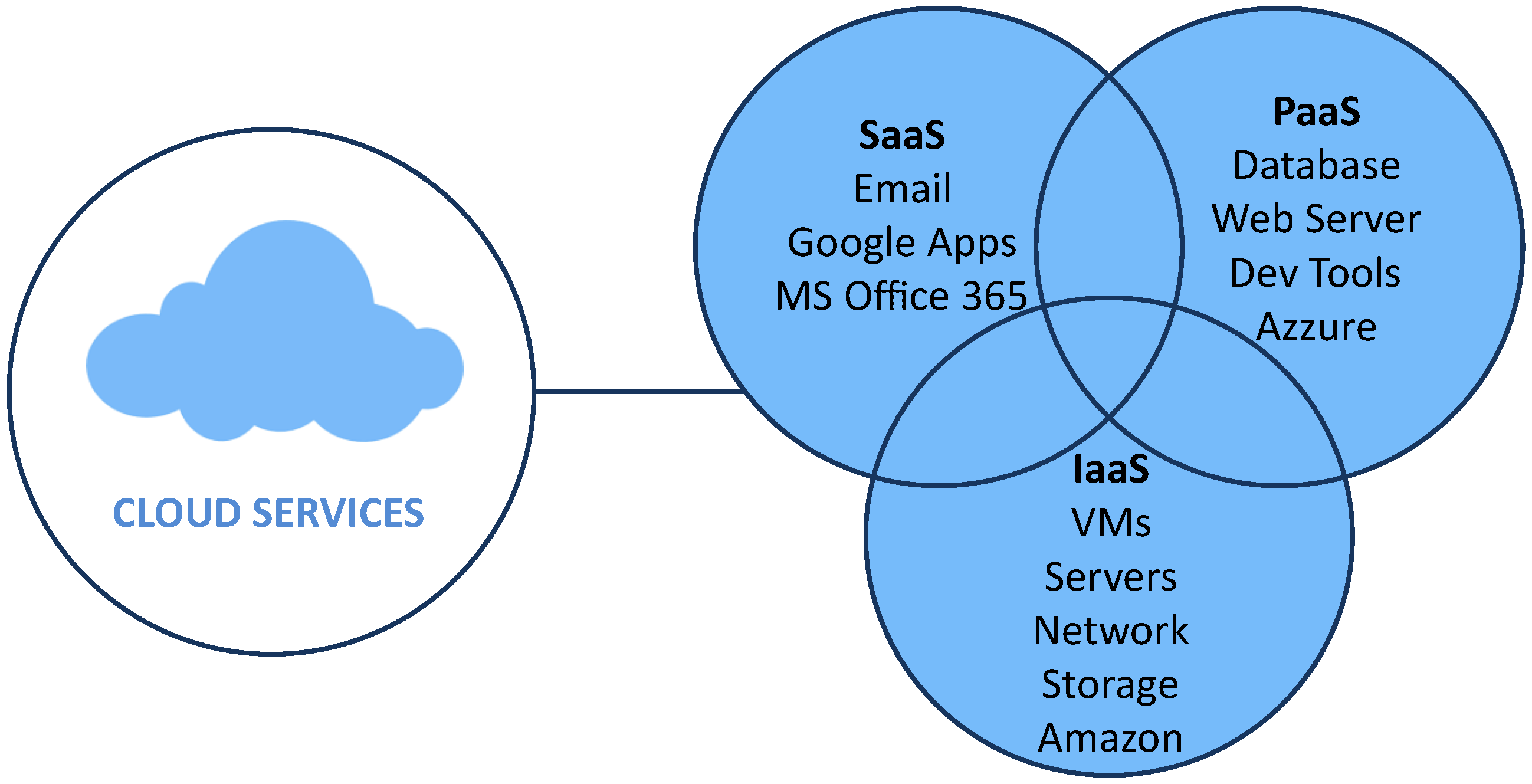
1. Introduction
1.1. Limitations of Research and Contributions
- An improved levy-based PSO algorithm is proposed to solve the VM-placement problem
- Variable-sized bin packing is used to minimize the utilization rate of the running PMs
- The best-fit strategy is used to achieve an optimal solution without wasting any space of a running PM
- Efficient use of cloud data center resources, i.e., packing a PM to its capacity without wasting any resource
1.2. Implementation Practice Guidelines
- Random distribution of population
- Evaluation of all particle fitness value
- Finding the personal best and global best values
2. Related Work
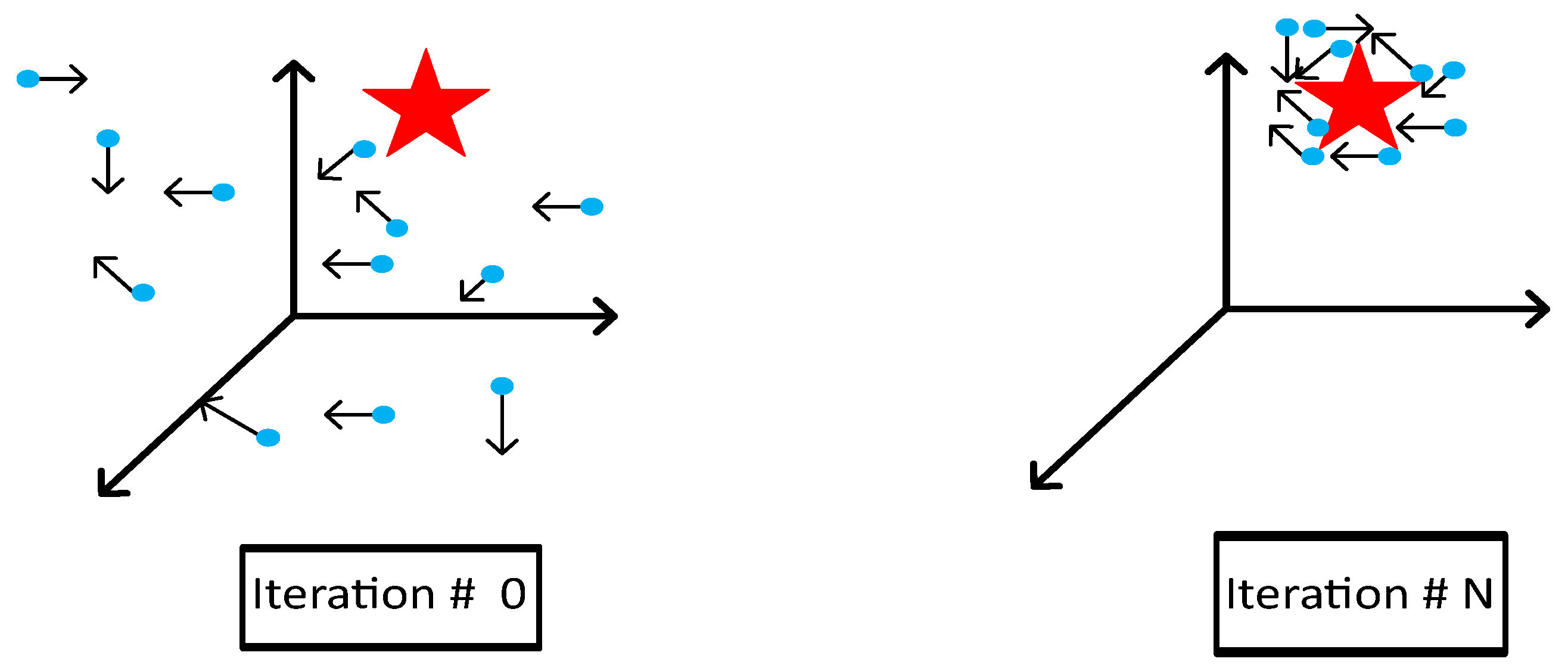
3. Particle Swarm Optimization Algorithm
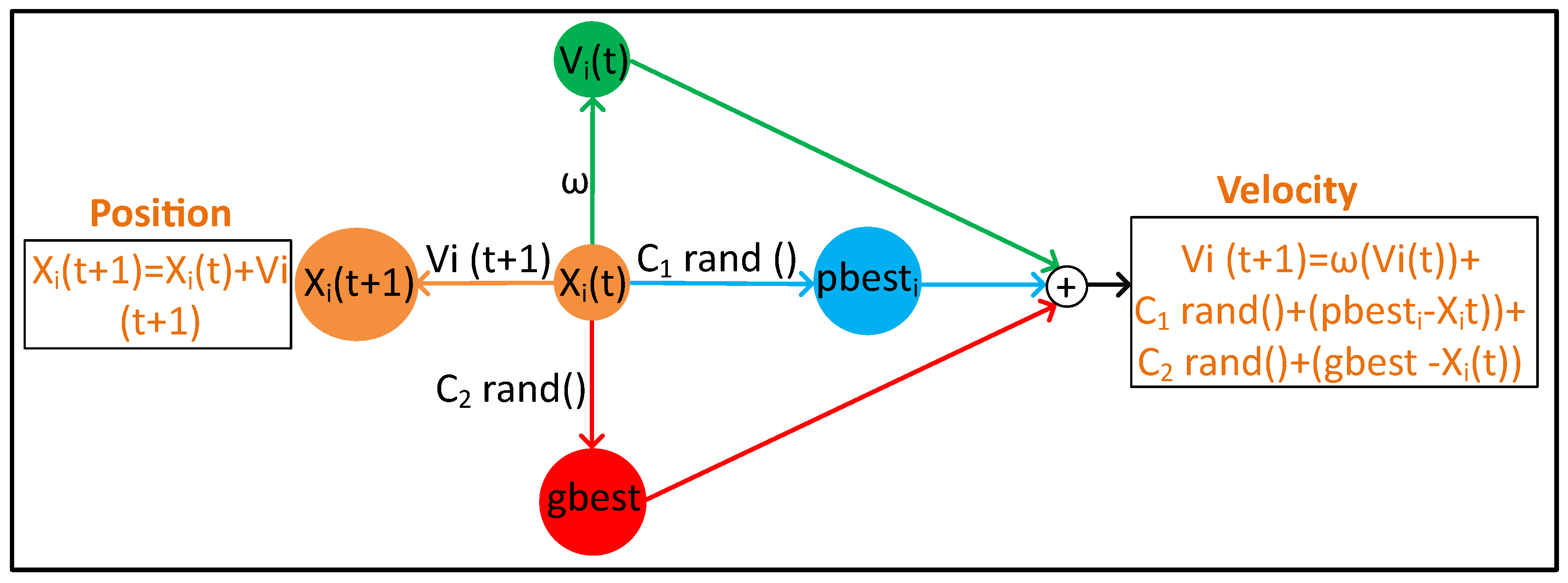
3.1. Update Position
3.2. Update Velocity
- Previous velocity
- A velocity component that drives a particle towards the location in search space where it previously found the best solution
- A velocity through which the best solution found by neighbor particles in search space
4. Levy Flight Algorithm
- The selection of random direction
- The production of new steps
4.1. Simple Levy Distribution
4.2. Fourier Transform
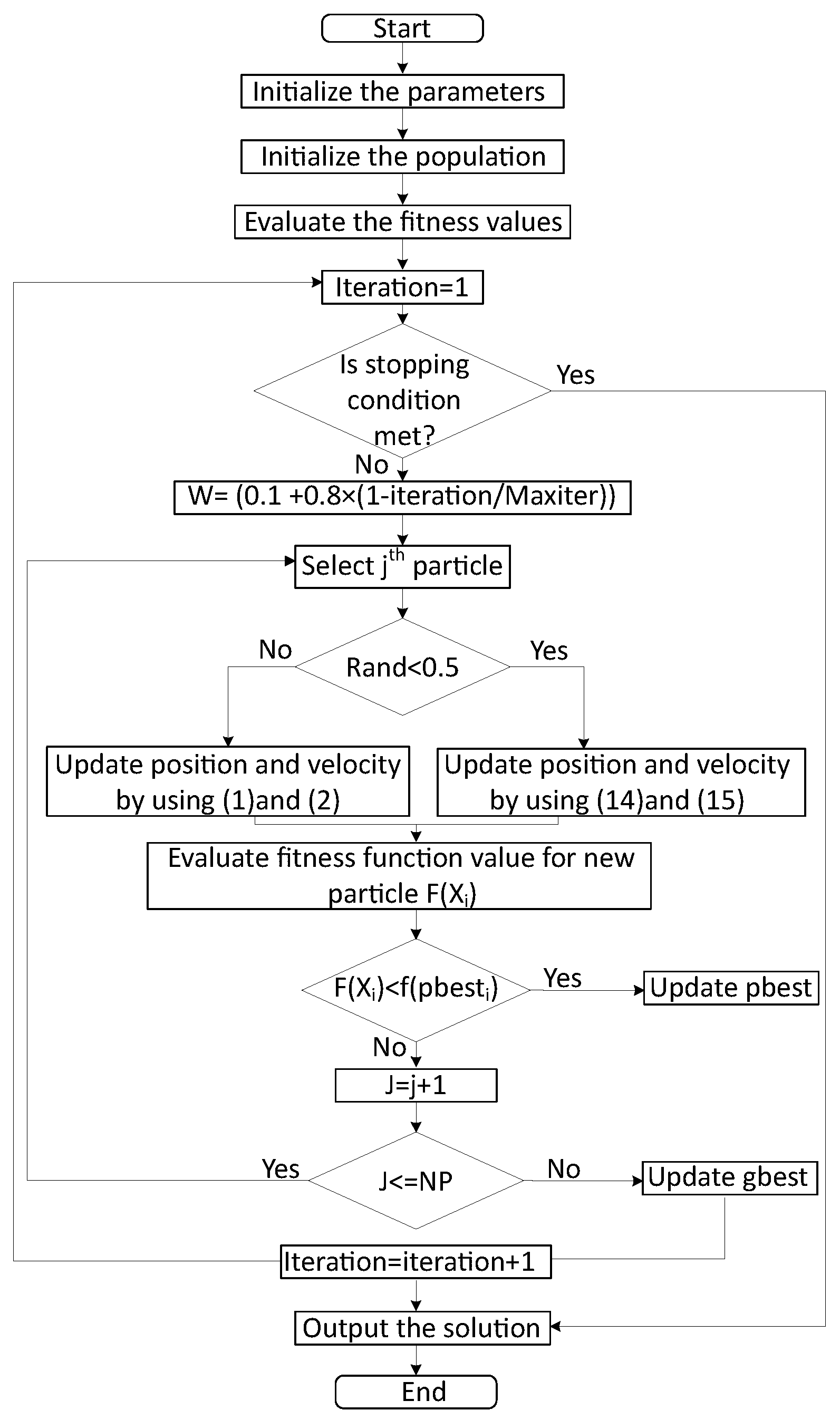
5. Proposed Levy Flight Particle Swarm Optimization with Variable Sized Bin Packing
| Algorithm 1 Pseudocode of the PSOLF |
 |
6. Problem Formulation
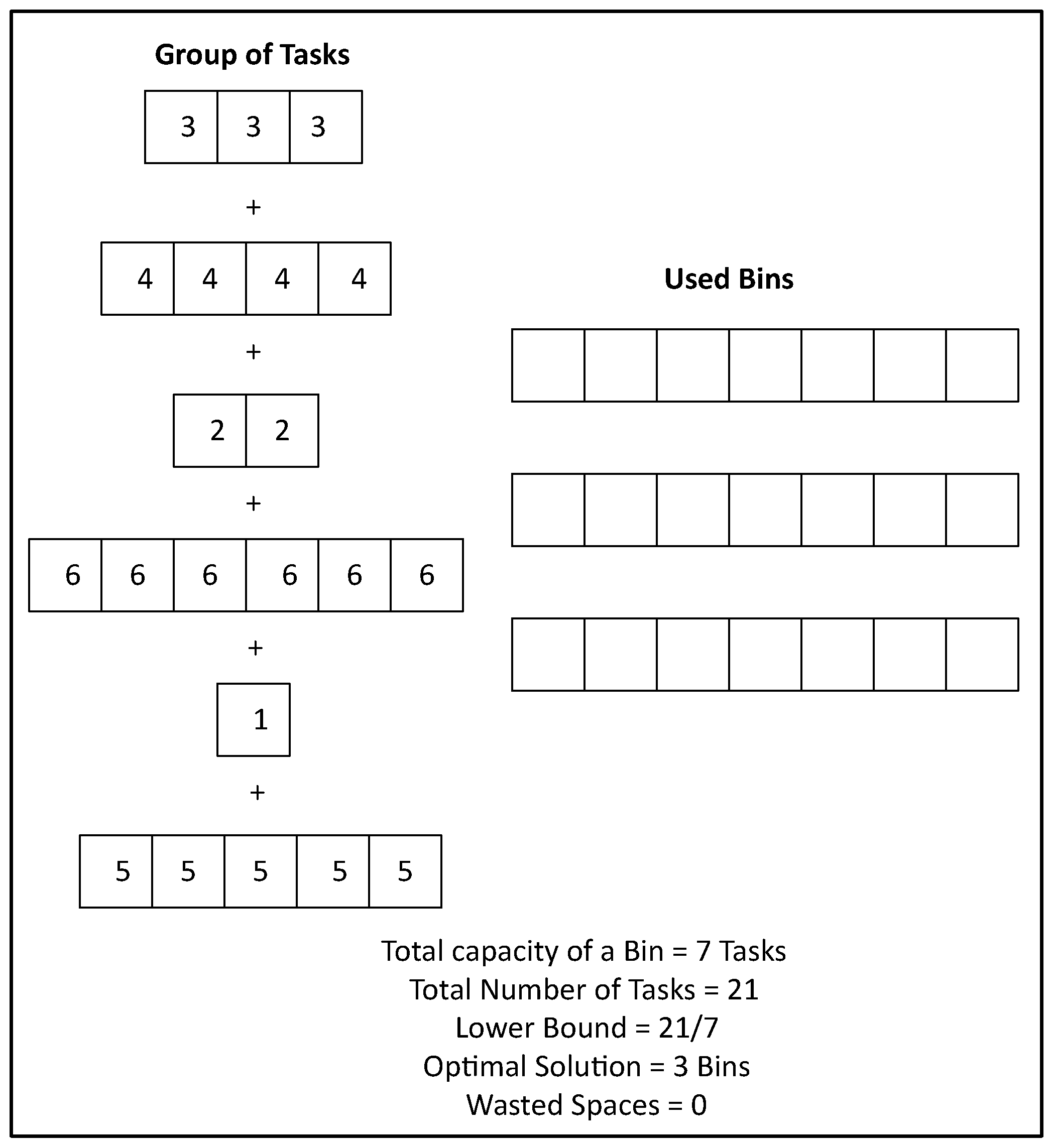
7. Bin Packing Problem
7.1. Lower Bound for the Problem
- Add all items
- Then divide them with total capacity of a bin
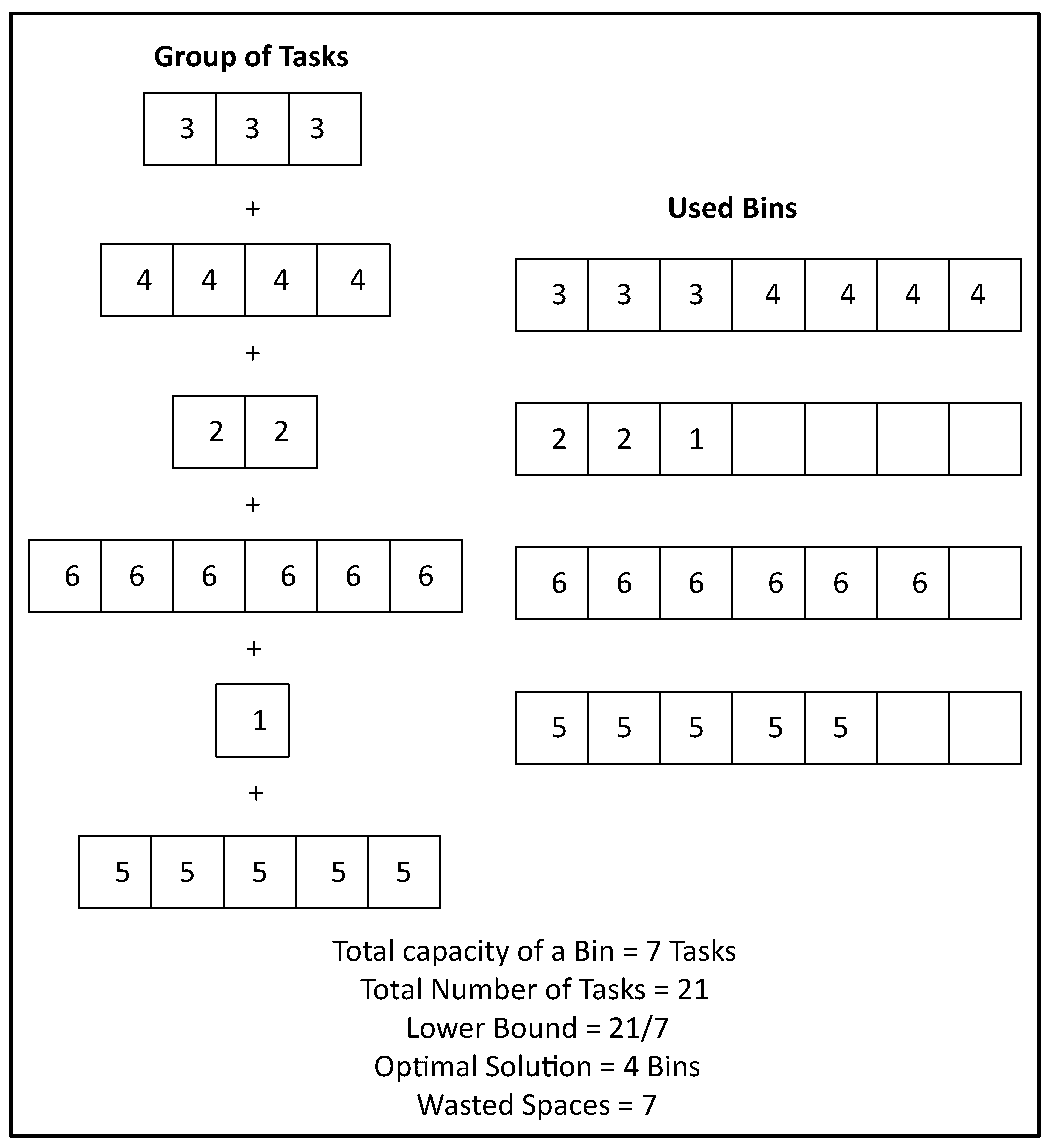
7.2. First Fit Algorithm
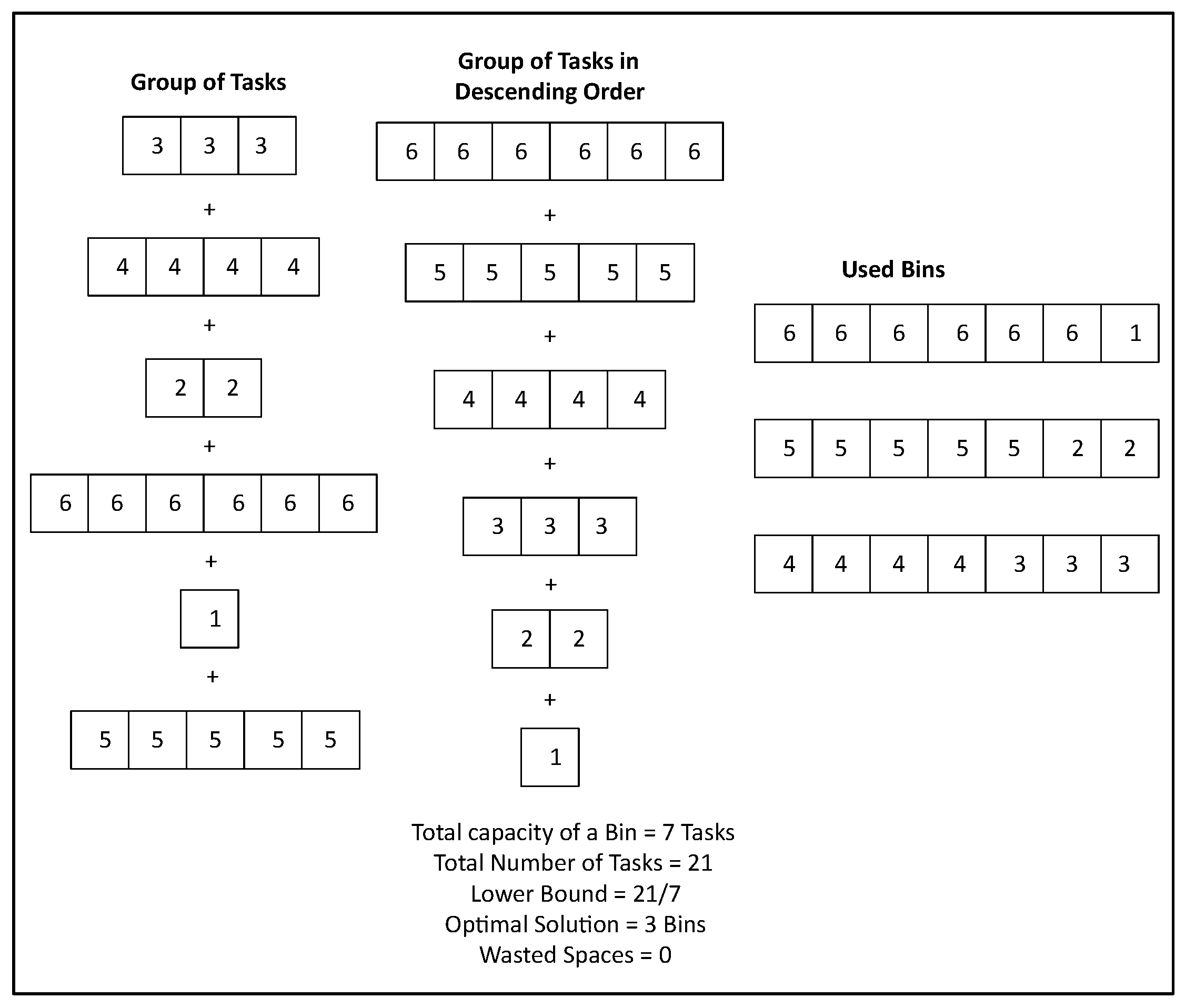
7.3. Best Fit Algorithm
8. Simulation Results
8.1. Benchmark Functions
8.2. Comparison of Algorithms
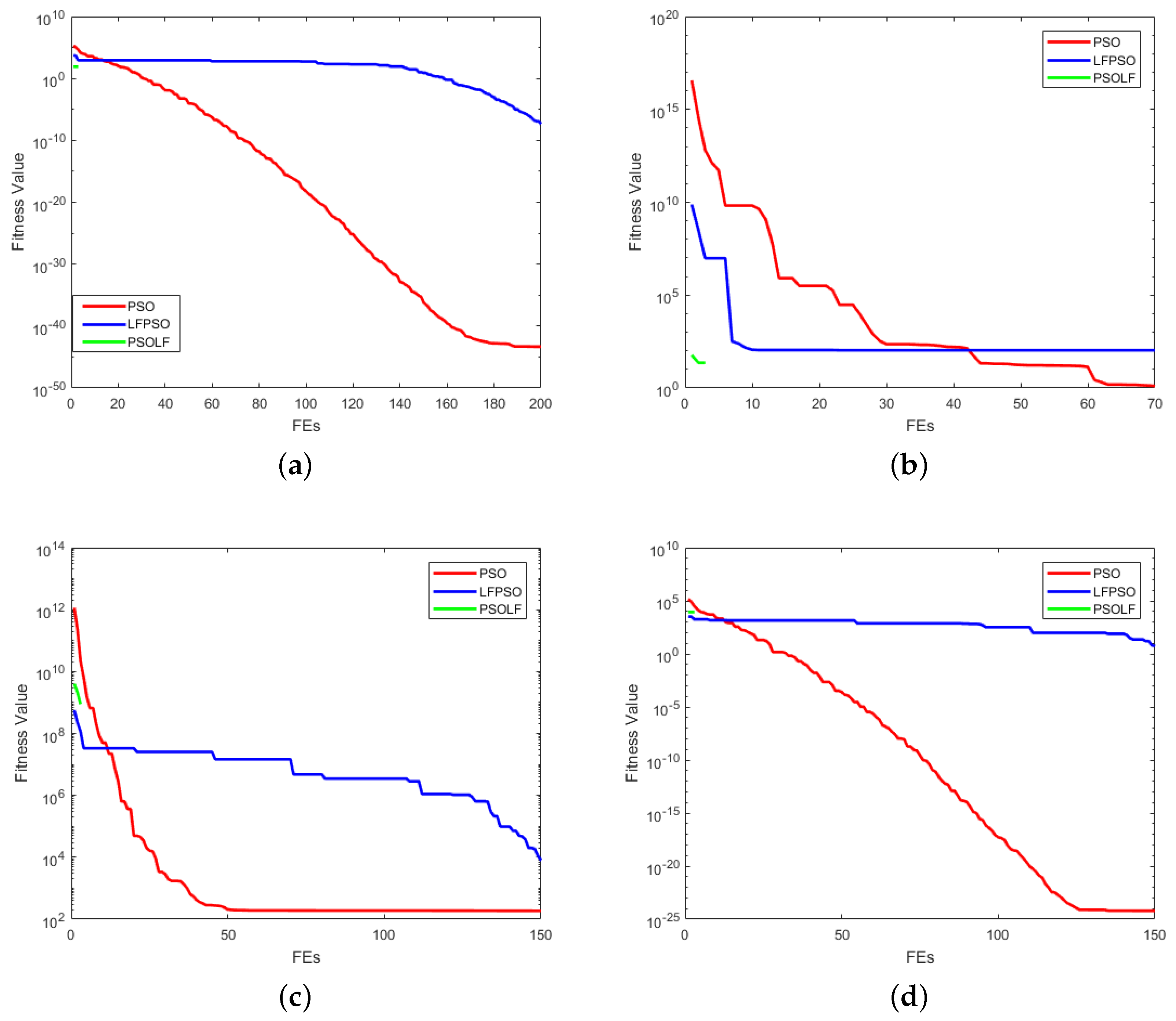
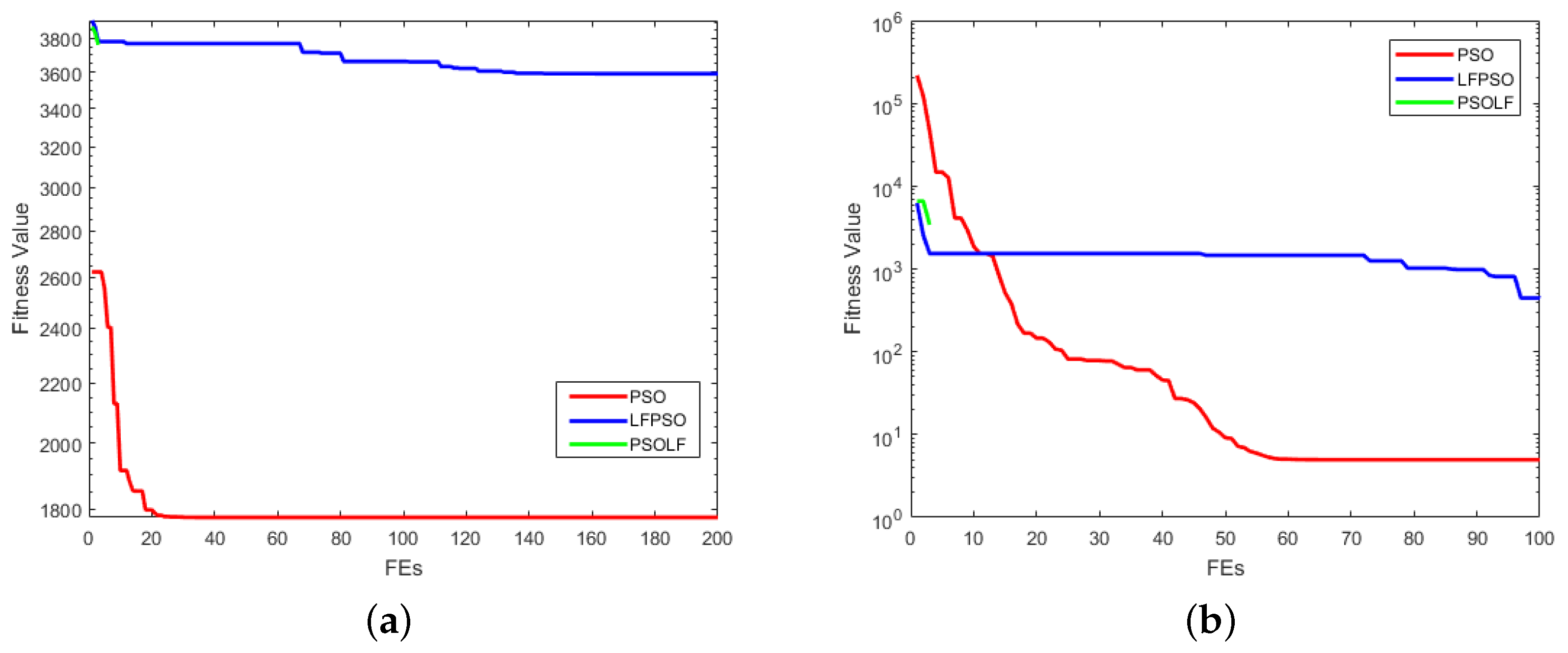
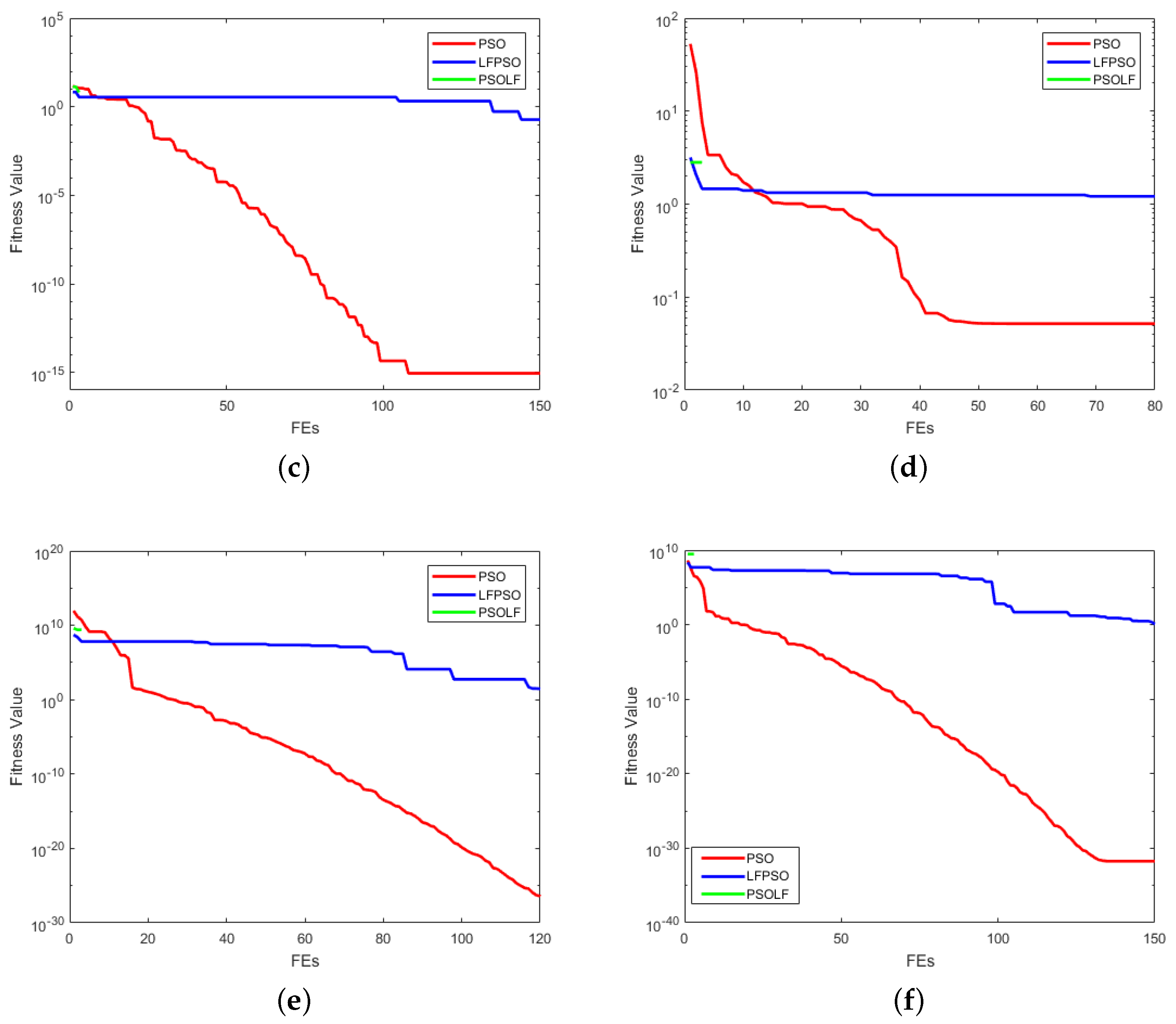
8.2.1. Discussion of Convergence Progress
8.2.2. Unimodal Functions
8.2.3. Multimodal Functions
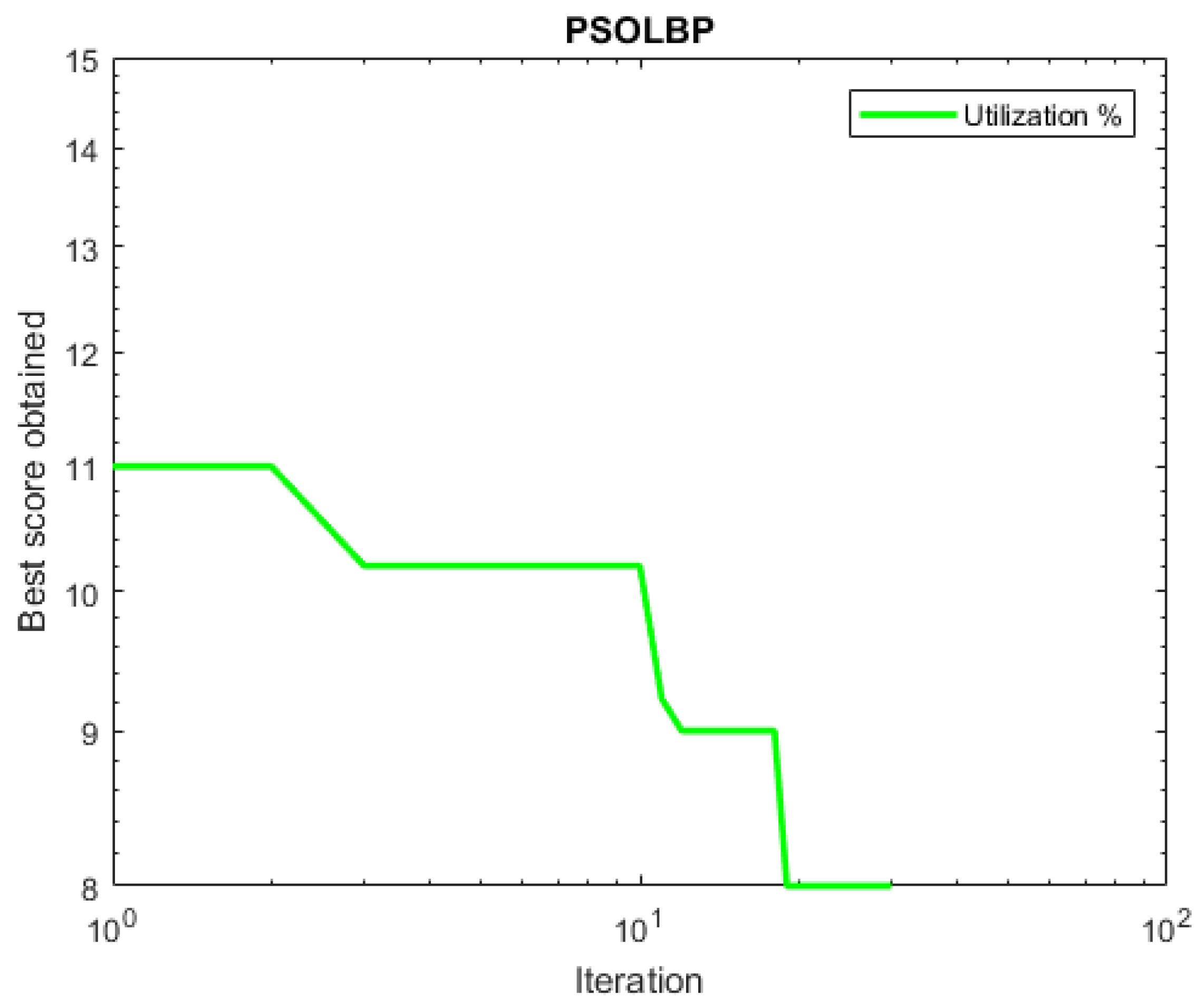
8.3. PSOLBP
9. Conclusions
Future Studies
Author Contributions
Funding
Conflicts of Interest
References
- Kong, Y.; Zhang, M.; Ye, D. A belief propagation-based method for task allocation in open and dynamic cloud environments. Knowl.-Based Syst. 2017, 115, 123–132. [Google Scholar] [CrossRef]
- Guo, Y.; Stolyar, A.; Walid, A. Online VM Auto-Scaling Algorithms for Application Hosting in a Cloud. IEEE Trans. Cloud Comput. 2018. [Google Scholar] [CrossRef]
- Fu, X.; Chen, J.; Deng, S.; Wang, J.; Zhang, L. Layered virtual machine migration algorithm for network resource balancing in cloud computing. Front. Comput. Sci. 2018, 12, 75–85. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Abdle-Fatah, L.; Sangaiah, A.K. An improved Levy based whale optimization algorithm for bandwidth-efficient virtual machine placement in cloud computing environment. Clust. Comput. 2018, 1–16. [Google Scholar] [CrossRef]
- Aisha Fatima, N.J.; Sultana, T.; Butt, A.A.; Shabbir, S. An Efficient Virtual Machine Placement via Bin Packing in Cloud Data Centers. In Proceedings of the 33rd International Conference on Advanced Information Networking and Applications (AINA), Matsue, Japan, 27–29 March 2019. [Google Scholar]
- Jensi, R.; Wiselin, G. An enhanced particle swarm optimization with levy flight for global optimization. Appl. Soft Comput. 2016, 43, 248–261. [Google Scholar] [CrossRef]
- Mirjalili, S.; Saremi, S.; Mirjalili, S.M.; Coelho, L.d.S. Multi-objective grey wolf optimizer: A novel algorithm for multi-criterion optimization. Expert Syst. Appl. 2016, 47, 106–119. [Google Scholar] [CrossRef]
- Khosravi, A.; Andrew, L.L.H.; Buyya, R. Dynamic vm placement method for minimizing energy and carbon cost in geographically distributed cloud data centers. IEEE Trans. Sustain. Comput. 2017, 2, 183–196. [Google Scholar] [CrossRef]
- Chekired, D.A.; Khoukhi, L. Smart grid solution for charging and discharging services based on cloud computing scheduling. IEEE Trans. Ind. Inform. 2017, 13, 3312–3321. [Google Scholar] [CrossRef]
- Cao, Z.; Lin, J.; Wan, C.; Song, Y.; Zhang, Y.; Wang, X. Optimal cloud computing resource allocation for demand side management in smart grid. IEEE Trans. Smart Grid 2017, 8, 1943–1955. [Google Scholar]
- Wang, H.; Tianfield, H. Energy-Aware Dynamic Virtual Machine Consolidation for Cloud Datacenters. IEEE Access 2018, 6, 15259–15273. [Google Scholar] [CrossRef]
- Javaid, N.; Javaid, S.; Abdul, W.; Ahmed, I.; Almogren, A.; Alamri, A.; Niaz, I.A. A hybrid genetic wind driven heuristic optimization algorithm for demand side management in smart grid. Energies 2017, 10, 319. [Google Scholar] [CrossRef]
- Zhou, A.; Wang, S.; Cheng, B.; Zheng, Z.; Yang, F.; Chang, R.N.; Lyu, M.R.; Buyya, R. Cloud service reliability enhancement via virtual machine placement optimization. IEEE Trans. Serv. Comput. 2017, 10, 902–913. [Google Scholar] [CrossRef]
- Moreno-Vozmediano, R.; Montero, R.S.; Huedo, E.; Llorente, I.M. Orchestrating the Deployment of High Availability Services on Multi-zone and Multi-cloud Scenarios. J. Grid Comput. 2018, 16, 39–53. [Google Scholar] [CrossRef]
- Vakilinia, S. Energy efficient temporal load aware resource allocation in cloud computing datacenters. J. Cloud Comput. 2018, 7, 2. [Google Scholar] [CrossRef]
- Zahoor, S.; Javaid, S.; Javaid, N.; Ashraf, M.; Ishmanov, F.; Afzal, M. Cloud Fog Based Smart Grid Model for Efficient Resource Management. Sustainability 2018, 10, 2079. [Google Scholar] [CrossRef]
- Naz, M.; Iqbal, Z.; Javaid, N.; Khan, Z.A.; Abdul, W.; Almogren, A.; Alamri, A. Efficient Power Scheduling in Smart Homes Using Hybrid Grey Wolf Differential Evolution Optimization Technique with Real Time and Critical Peak Pricing Schemes. Energies 2018, 11, 384. [Google Scholar] [CrossRef]
- Rahim, M.; Khalid, A.; Javaid, N.; Ashraf, M.; Aurangzeb, K.; Altamrah, A. Exploiting Game Theoretic Based Coordination Among Appliances in Smart Homes for Efficient Energy Utilization. Energies 2018, 11, 1426. [Google Scholar] [CrossRef]
- Duong-Ba, T.H.; Nguyen, T.; Bose, B.; Tran, T.T. A Dynamic virtual machine placement and migration scheme for data centers. IEEE Trans. Serv. Comput. 2018. [Google Scholar] [CrossRef]
- Khalid, A.; Javaid, N.; Guizani, M.; Alhussein, M.; Aurangzeb, K.; Ilahi, M. Towards dynamic coordination among home appliances using multi-objective energy optimization for demand side management in smart buildings. IEEE Access 2018, 6, 19509–19529. [Google Scholar] [CrossRef]
- Khan, A.; Javaid, N.; Khan, M.I. Time and device based priority induced comfort management in smart home within the consumer budget limitation. Sustain. Cities Soc. 2018, 41, 538–555. [Google Scholar] [CrossRef]
- Mohiuddin, I.; Almogren, A.; al Qurishi, M.; Hassan, M.M.; al Rassan, I.; Fortino, G. Secure distributed adaptive bin packing algorithm for cloud storage. Future Gener. Comput. Syst. 2019, 90, 307–316. [Google Scholar] [CrossRef]
- Alam, M.G.R.; Hassan, M.M.; Uddin, M.Z.I.; Almogren, A.; Fortino, G. Autonomic computation offloading in mobile edge for IoT applications. Future Gener. Comput. Syst. 2019, 90, 149–157. [Google Scholar] [CrossRef]
- Habibi, M.; Fazli, M.; Movaghar, A. Efficient distribution of requests in federated cloud computing environments utilizing statistical multiplexing. Future Gener. Comput. Syst. 2019, 90, 451–460. [Google Scholar] [CrossRef]
- Mao, B.; Yang, Y.; Wu, S.; Jiang, H.; Li, K.-C. IOFollow: Improving the performance of VM live storage migration with IO following in the cloud. Future Gener. Comput. Syst. 2019, 91, 167–176. [Google Scholar] [CrossRef]
- Ziafat, H.; Babamir, S.M. A hierarchical structure for optimal resource allocation in geographically distributed clouds. Future Gener. Comput. Syst. 2019, 90, 539–568. [Google Scholar] [CrossRef]
- Liu, X.-F.; Zhan, Z.-H.; Deng, J.D.; Li, Y.; Gu, T.; Zhang, J. An energy efficient ant colony system for virtual machine placement in cloud computing. IEEE Trans. Evol. Comput. 2018, 22, 113–128. [Google Scholar] [CrossRef]
- Riahi, M.; Krichen, S. A multi-objective decision support framework for virtual machine placement in cloud data centers: A real case study. J. Supercomput. 2018, 74, 2984–3015. [Google Scholar] [CrossRef]
- Rayati, M.; Ranjbar, A.M. Resilient transactive control for systems with high wind penetration based on cloud computing. IEEE Trans. Ind. Inform. 2018, 14, 1286–1296. [Google Scholar] [CrossRef]
- Lopez, J.; Rubio, J.E.; Alcaraz, C. A Resilient Architecture for the Smart Grid. IEEE Trans. Ind. Inform. 2018, 14, 3745–3753. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, N.; Kang, C.; Kirschen, D.S.; Xia, Q. Decision-Making Models for the Participants in Cloud Energy Storage. IEEE Trans. Smart Grid 2018, 9, 5512–5521. [Google Scholar] [CrossRef]
- Yang, T.; Lee, Y.; Zomaya, A. Collective energy-efficiency approach to data center networks planning. IEEE Trans. Cloud Comput. 2018, 6, 656–666. [Google Scholar] [CrossRef]
- Munshi, A.A.; Mohamed, Y.A.-R.I. Data Lake Lambda Architecture for Smart Grids Big Data Analytics. IEEE Access 2018, 6, 40463–40471. [Google Scholar] [CrossRef]
- Wu, L.; Zhang, Y.; Choo, K.-K.R.; He, D. Efficient Identity-Based Encryption Scheme with Equality Test in Smart City. IEEE Trans. Sustain. Comput. 2018, 3, 44–55. [Google Scholar] [CrossRef]
- Wu, Q.; Ishikawa, F.; Zhu, Q.; Xia, Y. Energy and migration cost-aware dynamic virtual machine consolidation in heterogeneous cloud datacenters. IEEE Trans. Serv. Comput. 2016. [Google Scholar] [CrossRef]
- Ferdaus, M.H.; Murshed, M.; Calheiros, R.N.; Buyya, R. Virtual machine consolidation in cloud data centers using ACO metaheuristic. In Proceedings of the European Conference on Parallel Processing, Porto, Portugal, 25–29 August 2014; Springer: Cham, Switzerland, 2014; pp. 306–317. [Google Scholar]
- Challita, S.; Paraiso, F.; Merle, P. A Study of Virtual Machine Placement Optimization in Data Centers. In Proceedings of the 7th International Conference on Cloud Computing and Services Science, CLOSER 2017, Porto, Portugal, 24–26 April 2017; pp. 343–350. [Google Scholar]
- Comi, A.; Fotia, L.; Messina, F.; Pappalardo, G.; Rosaci, D.; Sarné, G.M.L. A reputation-based approach to improve qos in cloud service composition. In Proceedings of the 2015 IEEE 24th International Conference on Enabling Technologies: Infrastructure for Collaborative Enterprises (WETICE), Larnaca, Cyprus, 15–17 June 2015; pp. 108–113. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Techniques | Objectives | Achievements | Limitations |
|---|---|---|---|
| Decentralized belief propagation based method (PD-LBP) [1] | Performance of task allocation | Best allocation of big tasks and efficient performance in dynamic cloud | An agent can execute only one subtask |
| Shadow routing based approach [2] | VM auto-scaling and VM-to-PM packing | Save energies and minimize operational cost | Chance of congestion in cloud data center |
| Layered VM-migration algorithm [3] | Migration of VMs | Efficiently balanced the network resources | Migration of one task at a time may increase delay |
| Improved levy-based whale optimization algorithm [4] | VM-placement | Efficiently balanced the load of a network | Initial placement of VMs is not an efficient way to balance the load of a whole network |
| Particle swarm optimization with levy flight (PSOLF) [6] | Increase convergence efficiency | Enhanced global search | Only proposed for linear problems |
| Multi-objective grey wolf optimization algorithm [7] | Multi-objective problem solving | Fixed size archive is integrated along with leader selection method | The proposed algorithm cannot handle uncertainties |
| VM-placement approach [8] | Cost minimization | Reduced energy consumption | There is no guarantee of renewable energy availability |
| Priority assignment algorithm [9] | Charging and discharging of electric vehicle | Stabled grid during on-peak hours | Disposal of batteries results in global warming |
| Cost-oriented model [10] | On-peak hours grid stability | Efficient tariff policies for users | User has to give upfront payment for reserved instance |
| Energy aware VM-consolidation and space aware best decreasing algorithm [11] | Save energy | Saved energy and assured SLA | Migration cost is great when VMs migrate too many times |
| Hybrid genetic wind-driven (GWD) algorithm [12] | Load flattening in grid area network | Scheduled the load of a single home as well as multiple homes | Chance of delay whenever the request rate is high |
| Network-topology-aware redundant VM-placement optimization algorithm [13] | Minimize the network resources consumption | Optimal VM-placement | Does not work for complex cloud |
| VM-placement algorithm [14] | Global load balancing of a cloud | Efficient cloud scheduling | Cost is increased |
| Secure distributed adaptive bin packing algorithm [22] | Efficient usage of resources and minimize number of active servers | Improved energy efficiency and minimized number of running servers | Initial placement cannot balance the load of a network |
| Deep Q-learning based code offloading method [23] | Reduce network delay | Efficient energy consumption | Cost is increased |
| Hierarchical state space model [29] | Manage fluctuation of wind | Provides robustness, optimality and flexibility | Energy cost is increased |
| Novel architecture for cloud computing platform [30] | Distribute the load of cloud using time series forecasting | Efficiently balanced the load of a cloud | A mechanism is needed to ensure the continuity of the network |
| Cloud energy storage pool [31] | Provide energy storage resources to consumers at cheap cost | Minimized the storage cost | Extra power loss to implement energy storage pool |
| S. No. | Function Name | Formula | Dimension | Search Range |
|---|---|---|---|---|
| 1 | 30 | [,100] | ||
| 2 | 30 | [−100,100] | ||
| 3 | 30 | [−100,100] | ||
| 4 | 30 | [−100,100] | ||
| 5 | 30 | [−100,100] | ||
| 6 | 30 | [−100,100] | ||
| 7 | 30 | [−100,100] | ||
| 8 | 30 | [−100,100] | ||
| 9 | 30 | [−100,100] | ||
| 10 | 30 | [−100,100] |
| Parameters | PSO | LFPSO | PSOLBP |
|---|---|---|---|
| Population size (NP) | 20 | 20 | 20 |
| Maximum Fes | 200,000 | 200,000 | 200,000 |
| c1, c2 | 1.1931 | 1.1931 | 1.1931 |
| Inertia weight | 0.7213 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fatima, A.; Javaid, N.; Sultana, T.; Hussain, W.; Bilal, M.; Shabbir, S.; Asim, Y.; Akbar, M.; Ilahi, M. Virtual Machine Placement via Bin Packing in Cloud Data Centers. Electronics 2018, 7, 389. https://doi.org/10.3390/electronics7120389
Fatima A, Javaid N, Sultana T, Hussain W, Bilal M, Shabbir S, Asim Y, Akbar M, Ilahi M. Virtual Machine Placement via Bin Packing in Cloud Data Centers. Electronics. 2018; 7(12):389. https://doi.org/10.3390/electronics7120389
Chicago/Turabian StyleFatima, Aisha, Nadeem Javaid, Tanzeela Sultana, Waqar Hussain, Muhammad Bilal, Shaista Shabbir, Yousra Asim, Mariam Akbar, and Manzoor Ilahi. 2018. "Virtual Machine Placement via Bin Packing in Cloud Data Centers" Electronics 7, no. 12: 389. https://doi.org/10.3390/electronics7120389
APA StyleFatima, A., Javaid, N., Sultana, T., Hussain, W., Bilal, M., Shabbir, S., Asim, Y., Akbar, M., & Ilahi, M. (2018). Virtual Machine Placement via Bin Packing in Cloud Data Centers. Electronics, 7(12), 389. https://doi.org/10.3390/electronics7120389