Experimental Evaluation of Multipath Mitigation in TDOA-Based Indoor Passive Localization System Using A Beam Steering Broadband Circular Polarization Antenna


Abstract
1. Introduction
2. Localization Principle and Multipath Analysis
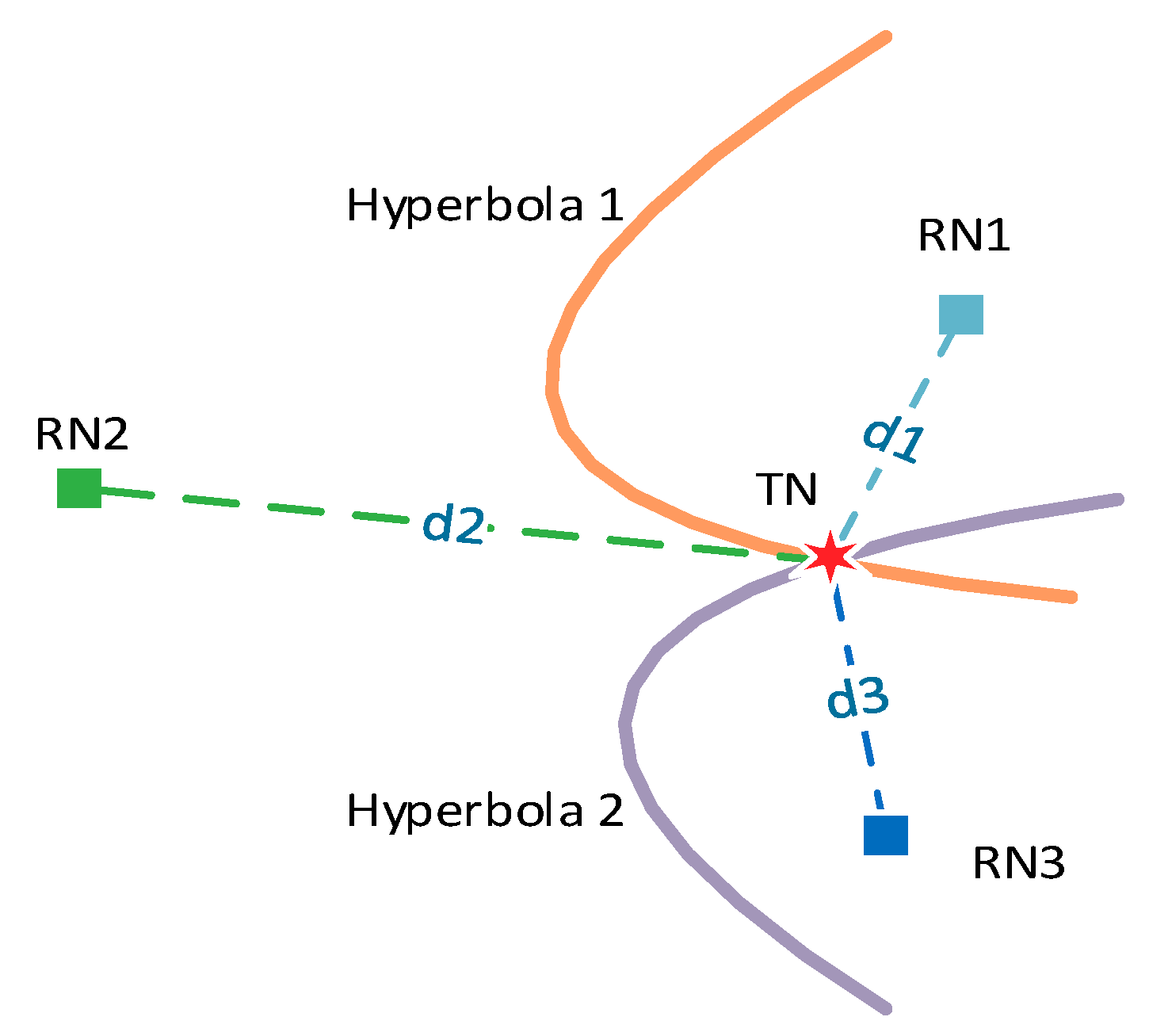
2.1. Principle of TDOA-Based Localization
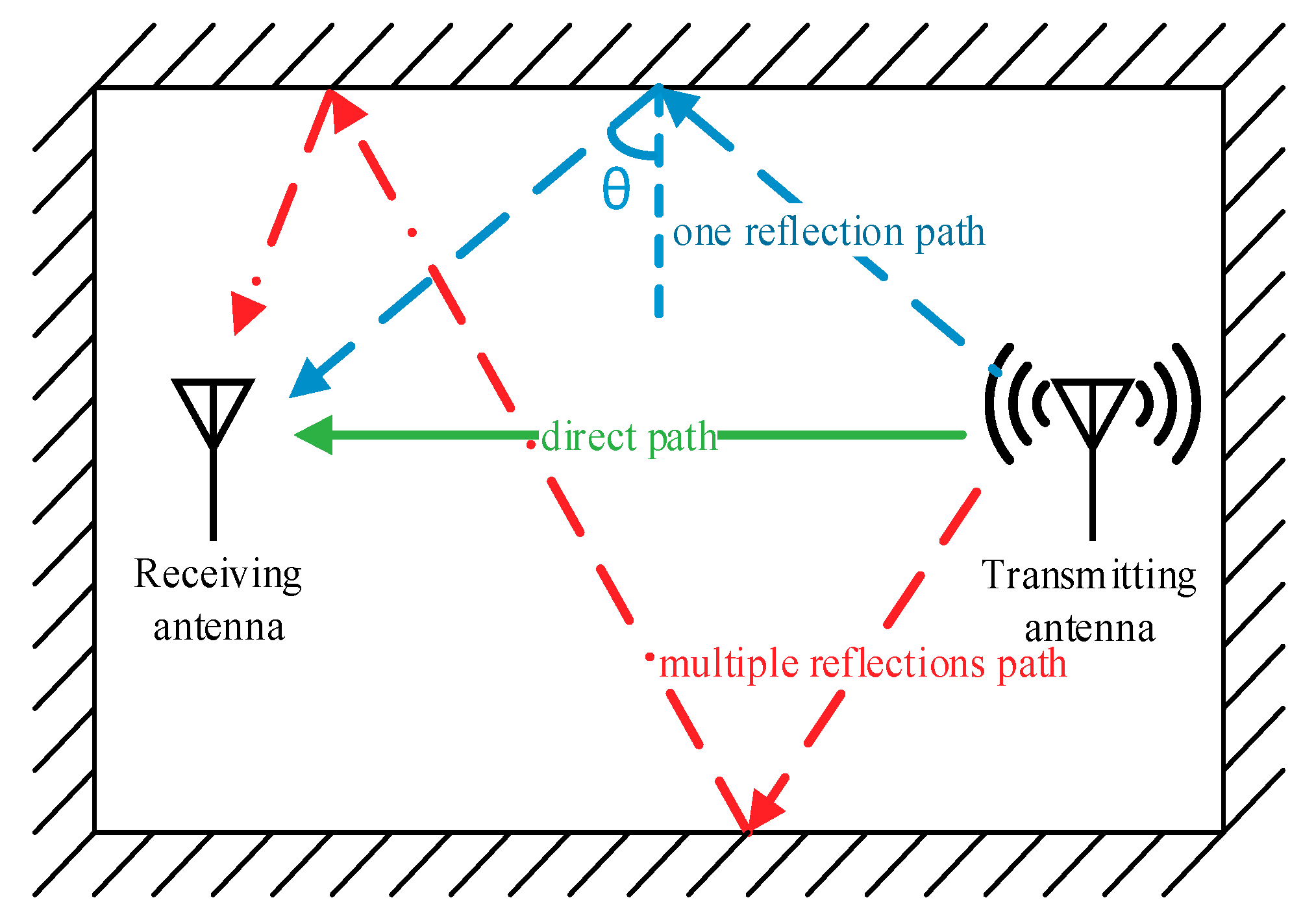
2.2. Indoor Multipath Analysis Based on Antenna Characteristics
3. Localization System Implementation
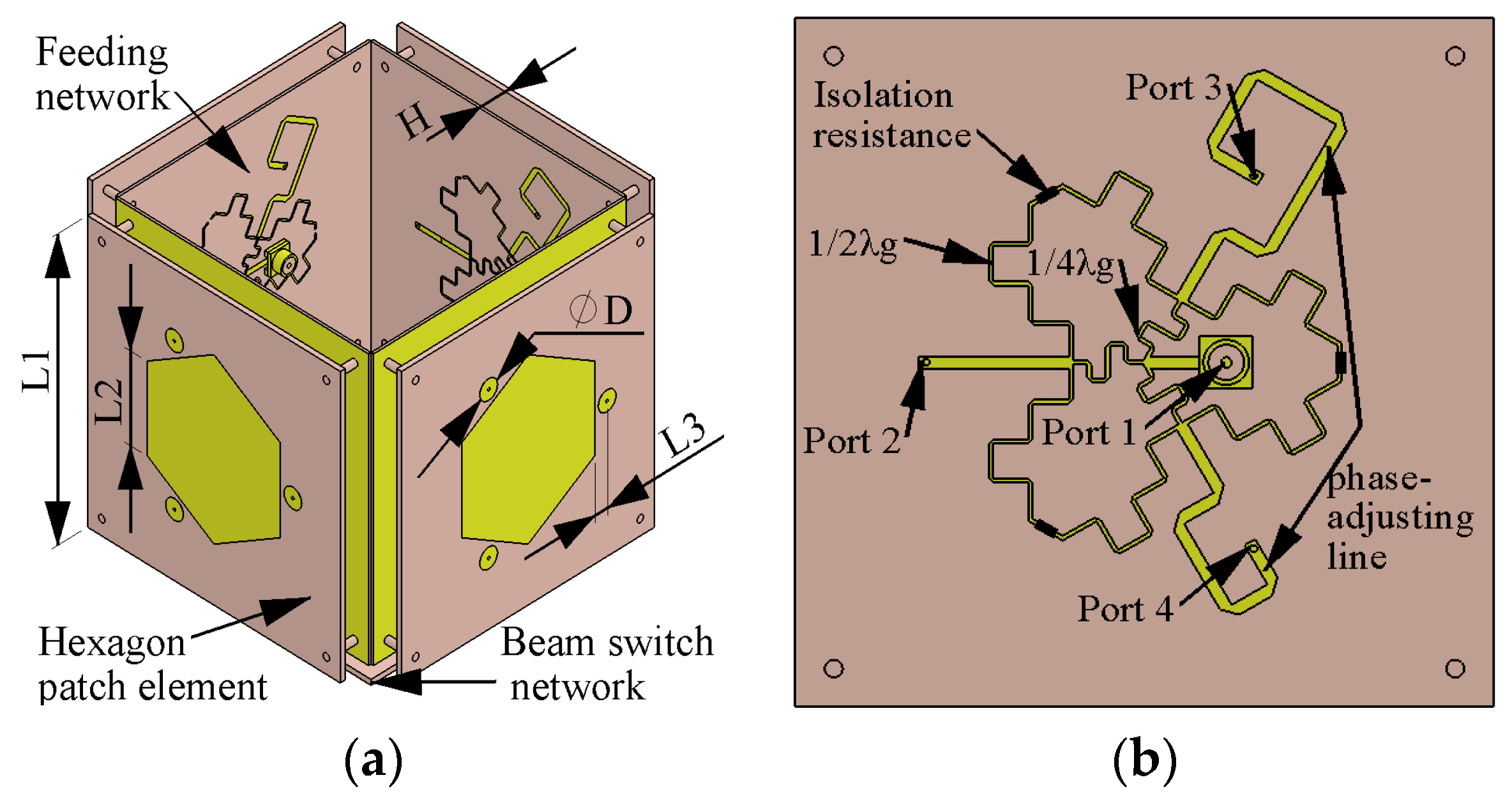
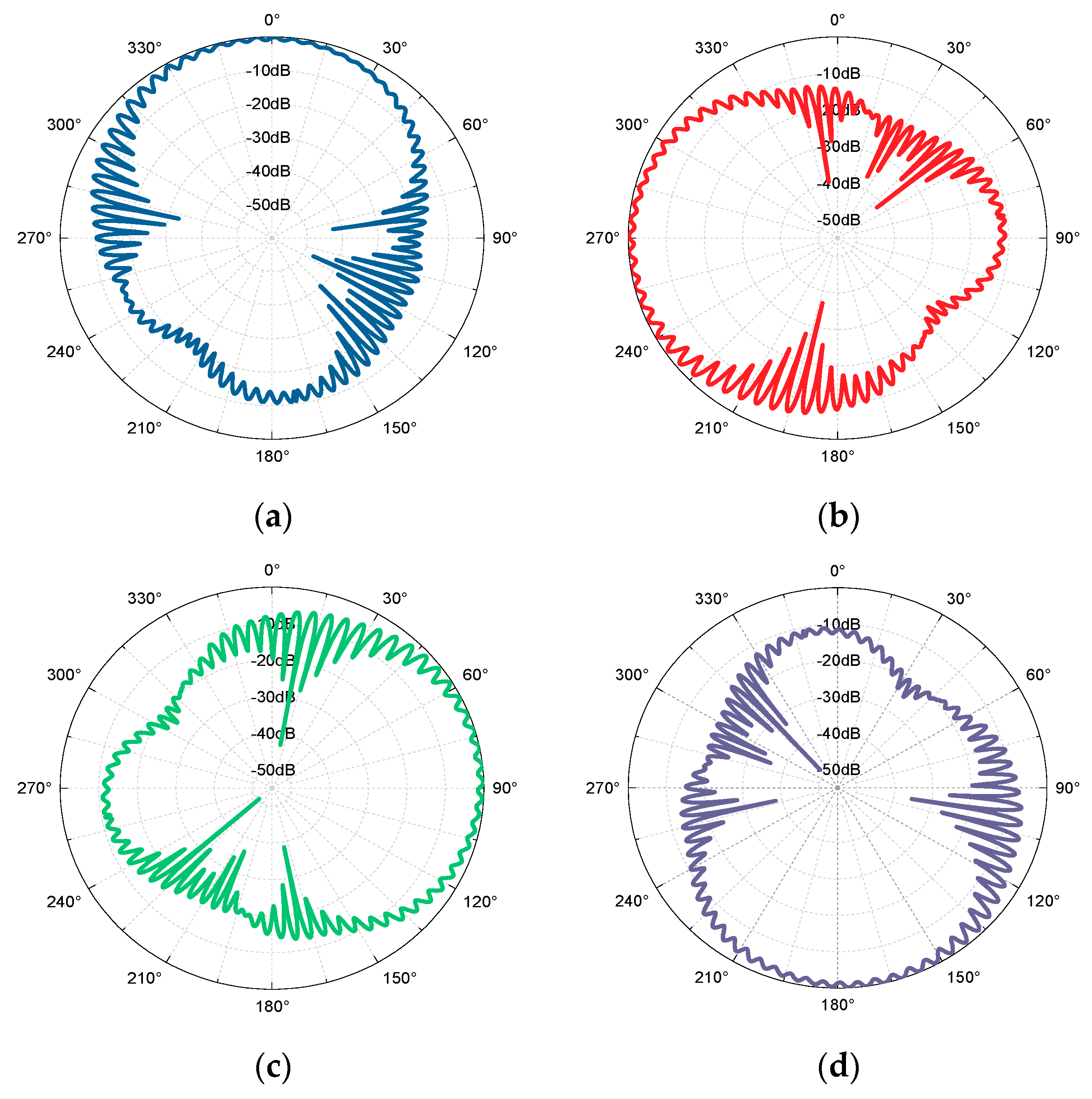
3.1. Antenna Design
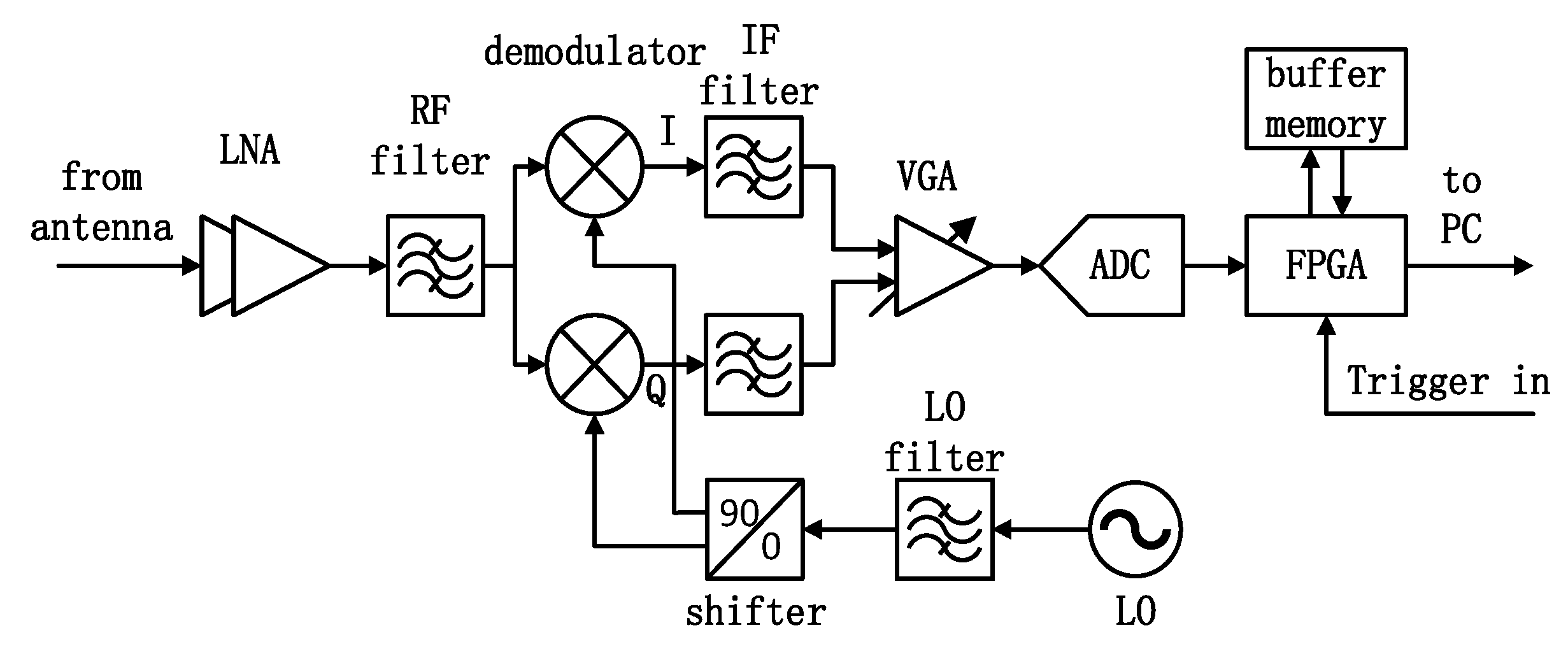
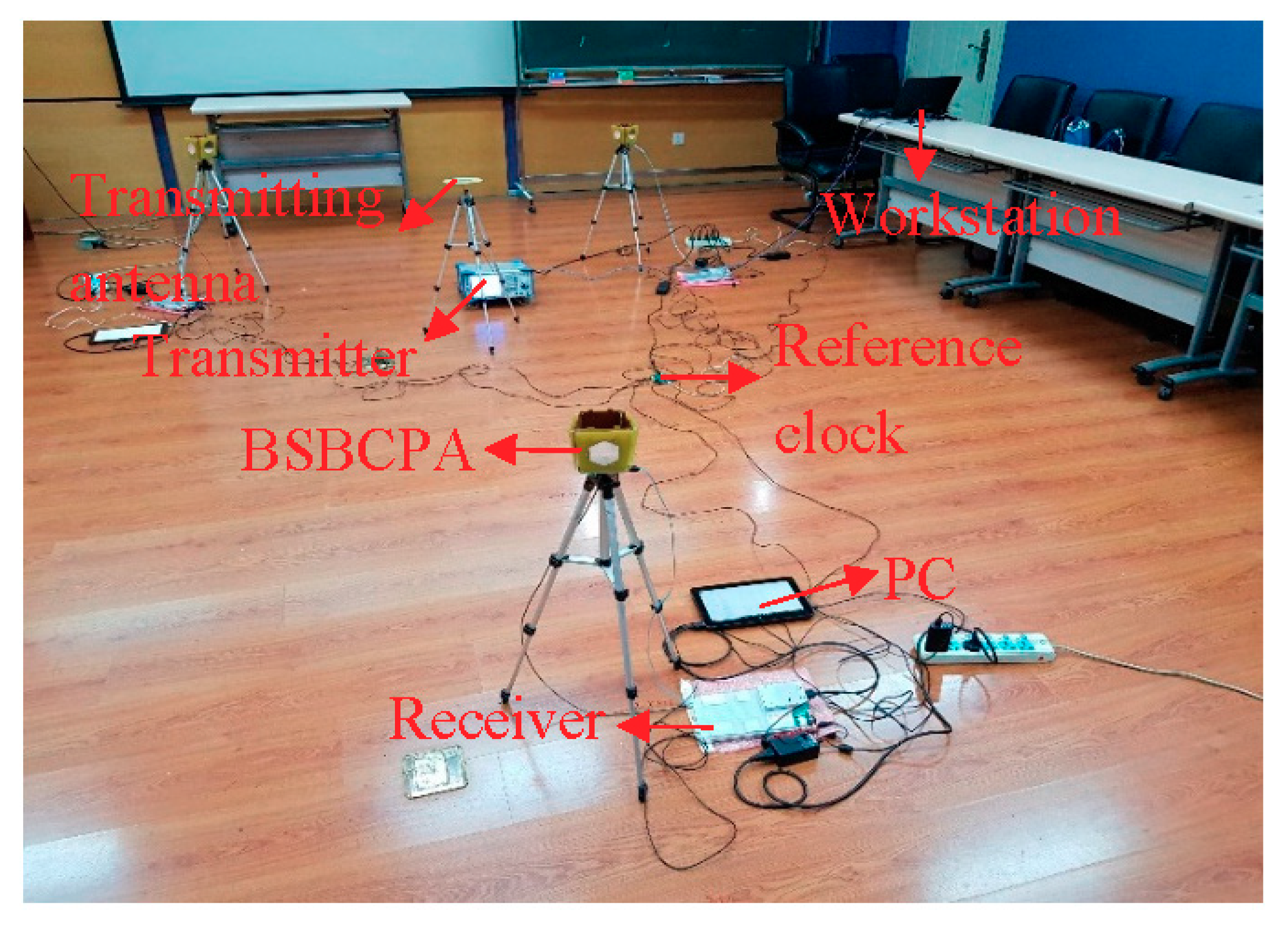
3.2. Localization System Architecture
3.3. Algorithm Implementation
4. Result and Discussion
4.1. System Evaluation Using RF Cables
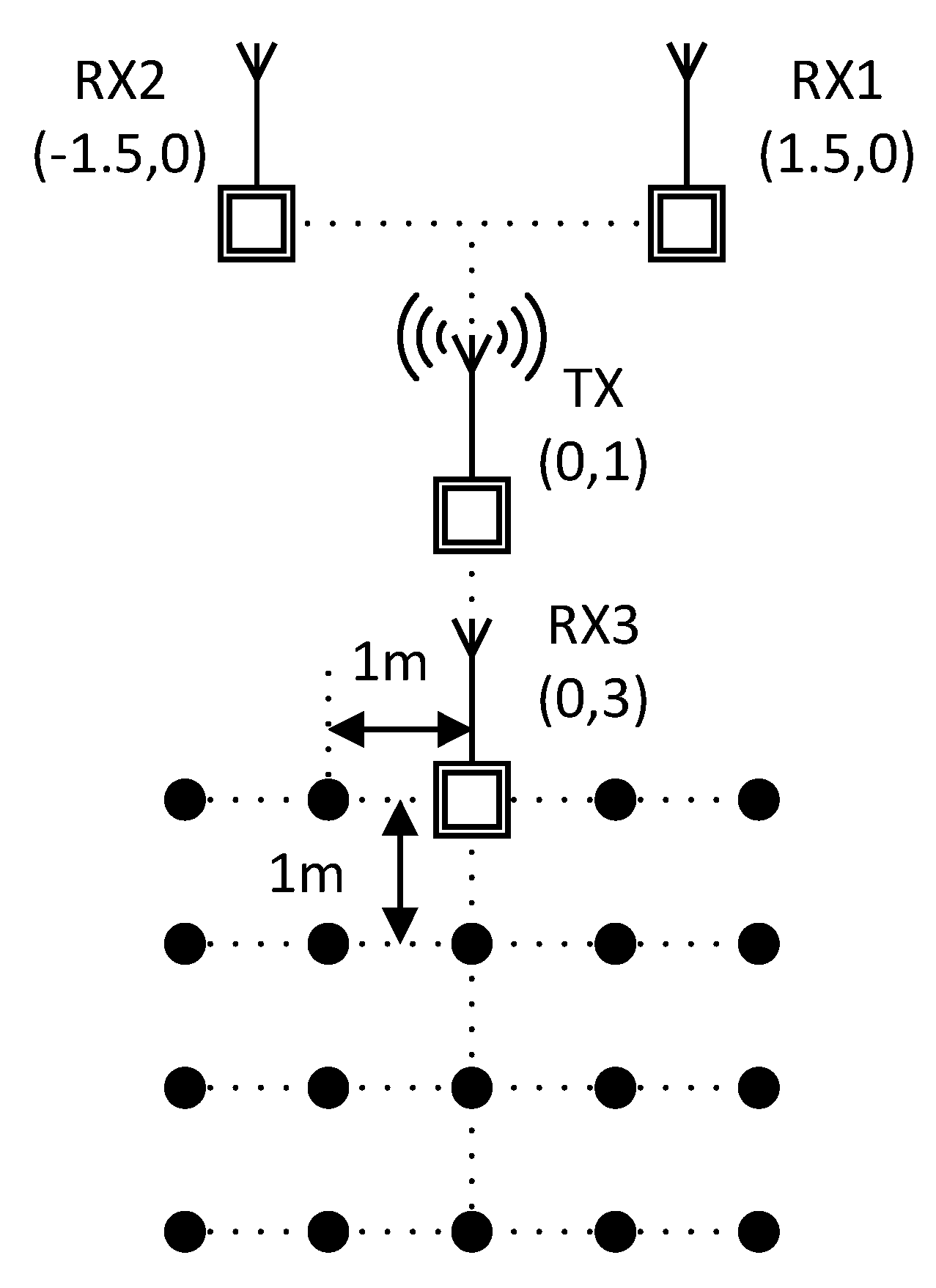
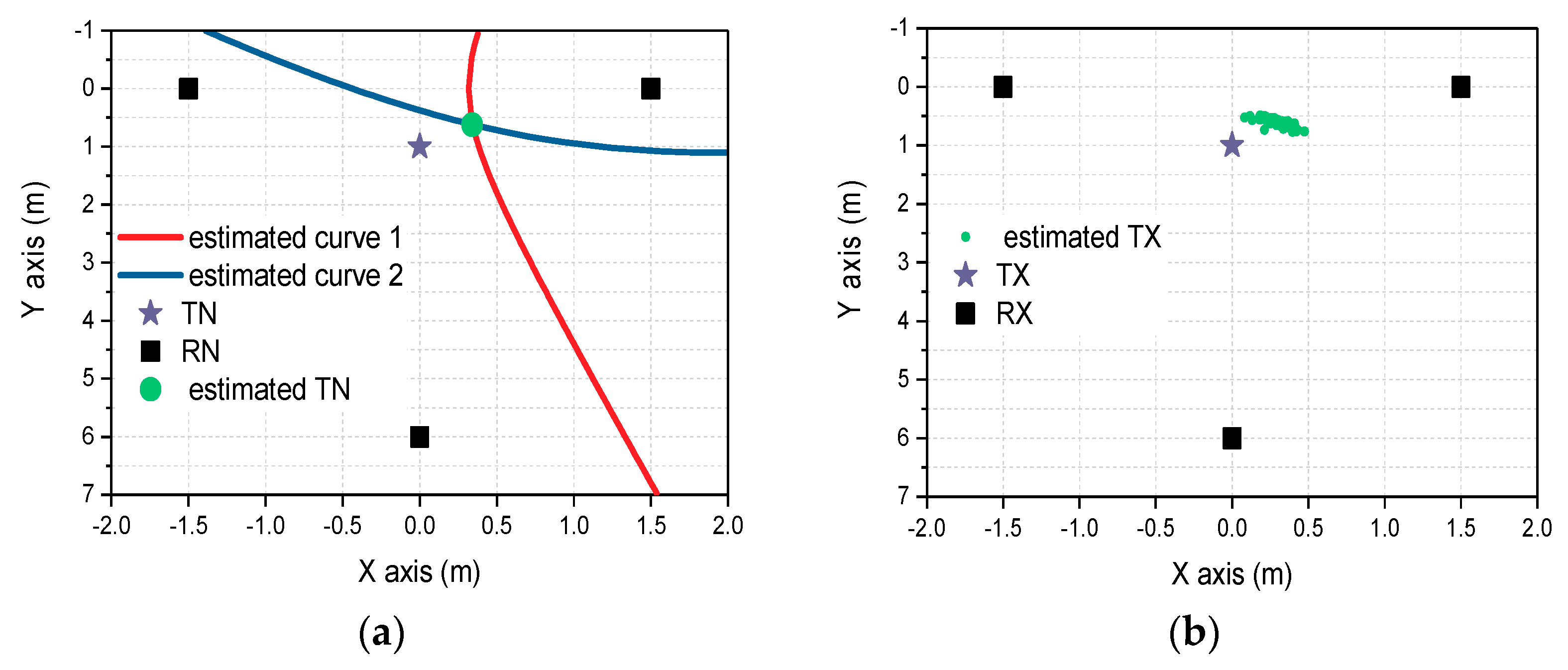
4.2. 2D Indoor Location Estimation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ramlall, R.; Chen, J.; Swindlehurst, A.L. Non-line-of-sight mobile station positioning algorithm using TOA, AOA, and Doppler-shift. In Proceedings of the 2014 Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), Corpus Christi, TX, USA, 20–21 November 2014; pp. 180–184. [Google Scholar]
- Xu, C.; He, J.; Zhang, X.; Tseng, P.-H.; Duan, S. Toward Near-Ground Localization: Modeling and Applications for TOA Ranging Error. IEEE Trans. Antennas Propag. 2017, 65, 5658–5662. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef]
- He, S.; Dong, X. High-Accuracy Localization Platform Using Asynchronous Time Difference of Arrival Technology. IEEE Trans. Instrum. Meas. 2017, 66, 1728–1742. [Google Scholar] [CrossRef]
- Wei, J.; Yu, C. Improvement of software defined radio based TDOA source localization. In Proceedings of the IECON 2014—40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 5307–5313. [Google Scholar]
- Pallas, M.A.; Jourdain, G. Active high resolution time delay estimation for large BT signals. IEEE Trans. Signal Process. 1991, 39, 781–788. [Google Scholar] [CrossRef]
- Li, X.; Pahlavan, K. Super-Resolution TOA Estimation with Diversity for Indoor Geolocation. IEEE Trans. Wirel. Commun. 2004, 3, 224–234. [Google Scholar] [CrossRef]
- Saarnisaari, H. TLS-ESPRIT in a time delay estimation. In Proceedings of the 1997 IEEE 47th Vehicular Technology Conference, Technology in Motion, Phoenix, AZ, USA, 4–7 May 1997; Volume 3, pp. 1619–1623. [Google Scholar]
- Zhao, F.; Yao, W.; Logothetis, C.C.; Song, Y. Comparison of Super-Resolution Algorithms for TOA Estimation in Indoor IEEE 802.11 Wireless LANs. In Proceedings of the 2006 International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 22–24 September 2006; pp. 1–5. [Google Scholar]
- Exel, R.; Mad, J.; Gaderer, G.; Loschmidt, P. A novel, high-precision timestamping platform for wireless networks. In Proceedings of the 2009 IEEE Conference on Emerging Technologies & Factory Automation, Mallorca, Spain, 22–25 September 2009; pp. 1–8. [Google Scholar]
- Schwalowsky, S.; Trsek, H.; Exel, R.; Kerö, N. System integration of an IEEE 802.11 based TDoA localization system. In Proceedings of the 2010 IEEE International Symposium on Precision Clock Synchronization for Measurement, Control and Communication, Portsmouth, NH, USA, 27 September–1 October 2010; pp. 55–60. [Google Scholar]
- Makki, A.; Siddig, A.; Bleakley, C.J. Robust High Resolution Time of Arrival Estimation for Indoor WLAN Ranging. IEEE Trans. Instrum. Meas. 2017, 66, 2703–2710. [Google Scholar] [CrossRef]
- Nepa, P.; Cavallo, F.; Bonaccorsi, M.; Aquilano, M.; Carrozza, M.C.; Dario, P. Experimental Analysis of RSSI-Based Indoor Location Systems with WLAN Circularly Polarized Antennas. In Wireless Mobile Communication and Healthcare; Springer: Berlin/Heidelberg, Germany, 2011; pp. 176–183. [Google Scholar]
- Gemayel, N.E.; Jäkel, H.; Jondral, F.K. Error analysis of a low cost TDoA sensor network. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 1040–1045. [Google Scholar]
- Lin, C.; Zhang, F.S.; Jiao, Y.C.; Zhang, F.; Xue, X. A Three-Fed Microstrip Antenna for Wideband Circular Polarization. IEEE Antennas Wirel. Propag. Lett. 2010, 9, 359–362. [Google Scholar] [CrossRef]
- Toh, B.Y.; Cahill, R.; Fusco, V.F. Understanding and measuring circular polarization. IEEE Trans. Educ. 2003, 46, 313–318. [Google Scholar]
- Chen, X.; Zhang, W.; Han, L.; Chen, X.; Ma, R.; Han, G. Wideband Circularly Polarized Antenna Realizing Omnidirectional Radiation in the Wider Azimuth Planes. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 2461–2464. [Google Scholar] [CrossRef]
- Wei, J.; Yu, C. Performance Evaluation of Practical Passive Source Localization Using Two Software Defined Radios. IEEE Commun. Lett. 2016, 20, 1880–1883. [Google Scholar] [CrossRef]
- Gemayel, N.E.; Koslowski, S.; Jondral, F.K.; Tschan, J. A low cost TDOA localization system: Setup, challenges and results. In Proceedings of the 2013 10th Workshop on Positioning, Navigation and Communication (WPNC), Dresden, Germany, 20–21 March 2013; pp. 1–4. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value (mm) | Parameters | Value (mm) |
|---|---|---|---|
| L1 | 85.5 | D | 5.6 |
| L2 | 28 | H | 8 |
| L3 | 3.8 | λg | 72 |
| Length Difference between Cables (m) | Mean Error (cm) | Standard Variance |
|---|---|---|
| 1 | 6 | 0.01 |
| 2 | 4 | 0.02 |
| 3 | 7 | 0.02 |
| Position of RX3 | Conference Room | Laboratory | ||||||
|---|---|---|---|---|---|---|---|---|
| BSBCPA | OLPA | BSBCPA | OLPA | |||||
| Mean Error (m) | Standard Variance | Mean Error (m) | Standard Variance | Mean Error (m) | Standard Variance | Mean Error (m) | Standard Variance | |
| (0, 3) | 0.54 | 0.07 | 1.69 | 0.16 | 0.25 | 0.09 | 1.55 | 0.21 |
| (1, 3) | 0.81 | 0.07 | 1.33 | 0.10 | 0.67 | 0.07 | 0.80 | 0.09 |
| (2, 3) | 0.58 | 0.12 | 1.43 | 0.07 | 0.45 | 0.06 | 0.97 | 0.07 |
| (−1, 3) | 0.73 | 0.10 | 1.76 | 0.20 | 1.08 | 0.14 | 2.90 | 0.62 |
| (−2, 3) | 1.65 | 0.25 | 1.82 | 0.18 | 1.16 | 0.20 | 2.12 | 0.48 |
| (0, 4) | 0.37 | 0.06 | 1.77 | 0.16 | 1.03 | 0.26 | 2.09 | 0.15 |
| (1, 4) | 0.75 | 0.10 | 0.84 | 0.08 | 0.58 | 0.12 | 0.99 | 0.11 |
| (2, 4) | 0.57 | 0.10 | 1.11 | 0.07 | 1.16 | 0.10 | 1.00 | 0.09 |
| (−1, 4) | 0.36 | 0.06 | 0.90 | 0.06 | 0.59 | 0.08 | 1.05 | 0.05 |
| (−2, 4) | 1.52 | 0.16 | 3.73 | 0.33 | 1.23 | 0.18 | 3.10 | 0.25 |
| (0, 5) | 0.63 | 0.03 | 1.08 | 0.07 | 0.82 | 0.12 | 1.13 | 0.09 |
| (1, 5) | 0.40 | 0.23 | 1.20 | 0.09 | 0.74 | 0.21 | 1.53 | 0.06 |
| (2, 5) | 0.73 | 0.05 | 2.59 | 0.13 | 0.59 | 0.05 | 3.21 | 0.11 |
| (−1, 5) | 1.17 | 0.23 | 1.34 | 0.13 | 0.92 | 0.17 | 1.10 | 0.10 |
| (−2, 5) | 0.72 | 0.12 | 1.47 | 0.18 | 0.95 | 0.13 | 3.28 | 0.33 |
| (0, 6) | 0.49 | 0.03 | 0.18 | 0.07 | 0.59 | 0.05 | 0.65 | 0.06 |
| (1, 6) | 0.34 | 0.06 | 2.75 | 0.10 | 1.34 | 0.05 | 1.64 | 0.09 |
| (2, 6) | 0.46 | 0.06 | 1.02 | 0.10 | 0.23 | 0.04 | 0.74 | 0.06 |
| (−1, 6) | 0.30 | 0.05 | 1.98 | 0.52 | 0.59 | 0.05 | 3.13 | 1.34 |
| (−2, 6) | 0.98 | 0.13 | 0.70 | 0.08 | 1.43 | 0.12 | 1.15 | 0.13 |
| Mean | 0.70 | - | 1.53 | - | 0.82 | - | 1.70 | - |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, C.; Liu, Y.; Liu, L.; Yang, M.; Zhao, H.; Yin, X. Experimental Evaluation of Multipath Mitigation in TDOA-Based Indoor Passive Localization System Using A Beam Steering Broadband Circular Polarization Antenna. Electronics 2018, 7, 362. https://doi.org/10.3390/electronics7120362
Su C, Liu Y, Liu L, Yang M, Zhao H, Yin X. Experimental Evaluation of Multipath Mitigation in TDOA-Based Indoor Passive Localization System Using A Beam Steering Broadband Circular Polarization Antenna. Electronics. 2018; 7(12):362. https://doi.org/10.3390/electronics7120362
Chicago/Turabian StyleSu, Changjiang, Yanqun Liu, Leilei Liu, Mei Yang, Hongxin Zhao, and Xiaoxing Yin. 2018. "Experimental Evaluation of Multipath Mitigation in TDOA-Based Indoor Passive Localization System Using A Beam Steering Broadband Circular Polarization Antenna" Electronics 7, no. 12: 362. https://doi.org/10.3390/electronics7120362
APA StyleSu, C., Liu, Y., Liu, L., Yang, M., Zhao, H., & Yin, X. (2018). Experimental Evaluation of Multipath Mitigation in TDOA-Based Indoor Passive Localization System Using A Beam Steering Broadband Circular Polarization Antenna. Electronics, 7(12), 362. https://doi.org/10.3390/electronics7120362