In this section, we describe the most relevant aspects of the configuration in our simulations. We include a short description of the operation workflow of the channel and physical layers in a network simulator. Additionally, we describe the traffic application scenario in which we test the different building attenuation models and the simulation settings of the scenarios. This section ends up with an analysis of the results that we obtained from simulations using two different urban areas.
4.1. Operation of Channel and Physical Modules in a Network Simulator
A network simulator follows the logic of the protocol stack. This is, a set of modules defines the behavior of a node during the simulation. For a wireless node, the first two modules represent the wireless communication channel and the physical layer, which are the most relevant for the objective of our study.
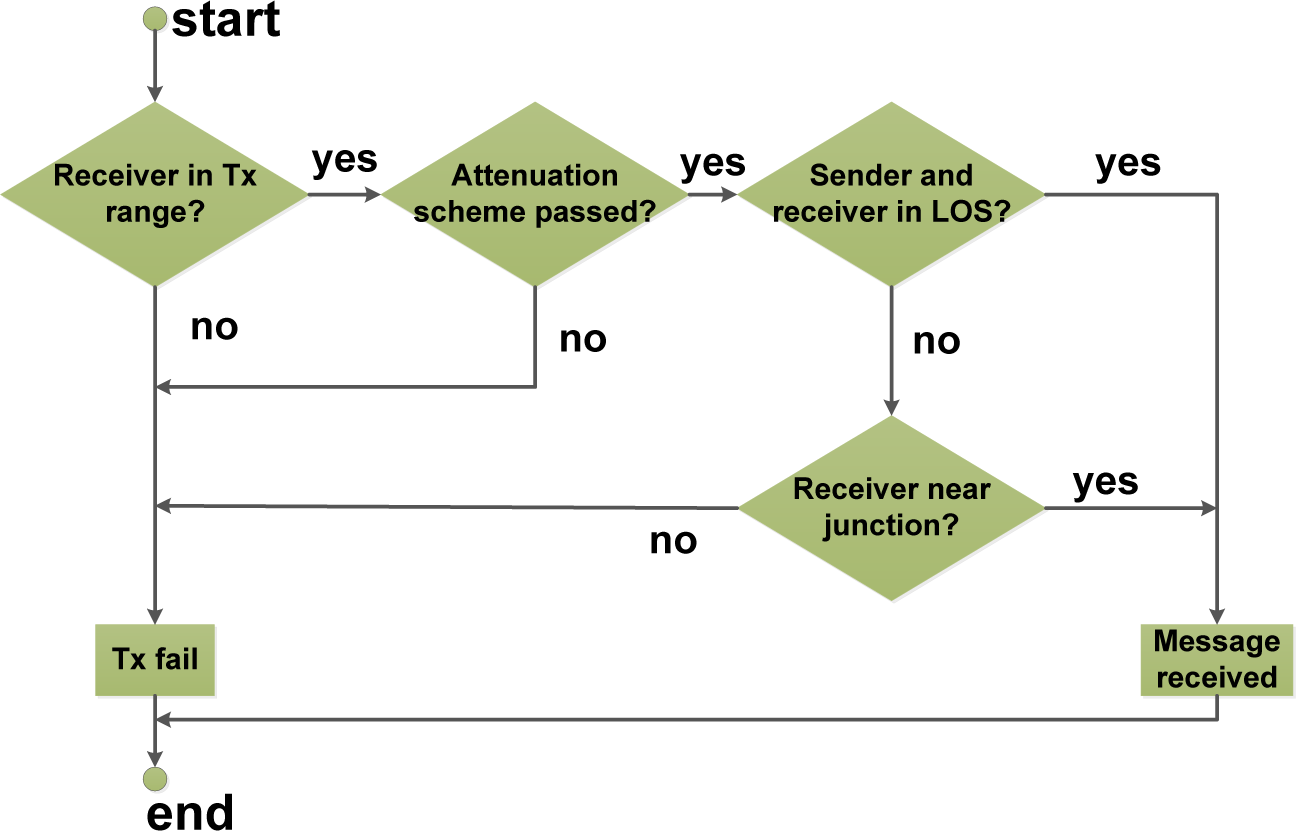
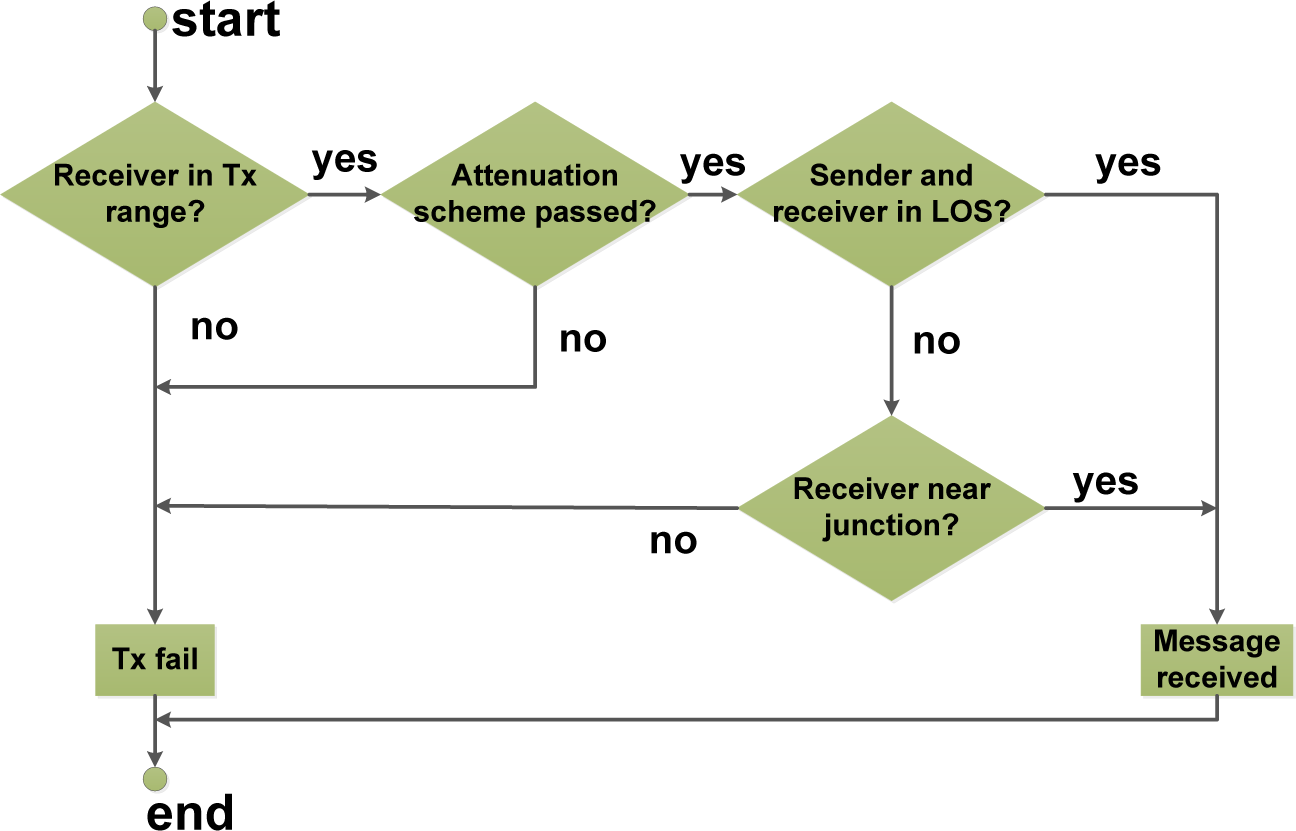
Channel module: This is in charge of computing the packet signal attenuation caused by the distance. This attenuation is typically called path loss or large-scale fading. It considers the attenuation caused by the presence of buildings. Then, the module introduces a variability effect in the computed power, which is called small-scale fading or just fading. Fading simulates effects, like reflectionand scattering.
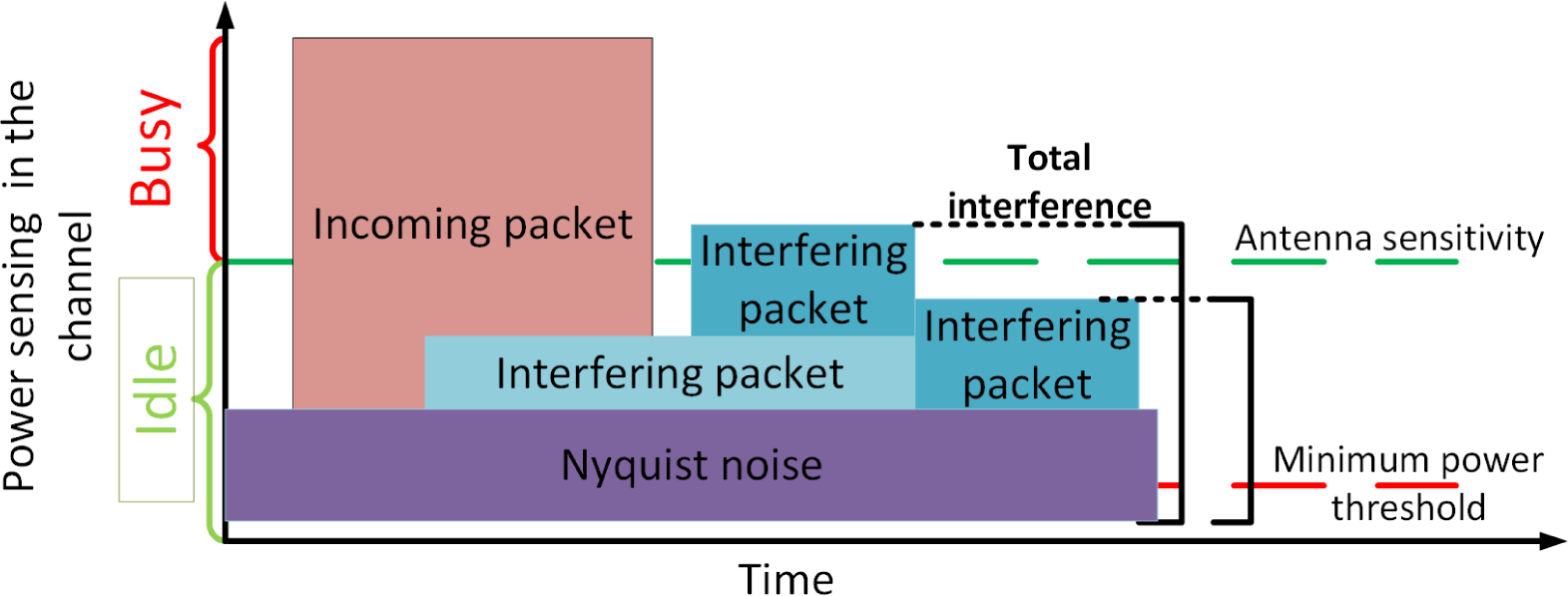
If the power computed in the reception of a packet is lower than a minimum threshold, then the packet is discarded and it is not processed by the physical simulator’s module. This threshold is typically obtained as a small fraction of the Nyquist noise associated with the channel (see
Figure 6).
Physical layer module: When a packet is received by this module, it is checked against the antenna sensitivity. If the power of the incoming packet is lower than the antenna sensitivity, then it is considered interference for other packets received during their duration. Otherwise, the packet is received, and its error probability is evaluated to determine if it was correctly demodulated. Multiple incoming packets with low power are grouped to get the total interference of the channel, as shown in
Figure 6. In this work, we employ the analytical packet error model proposed in [
14], which considers signal to interference and noise ratio (SINR), channel capacity and packet length to decide if a packet is erroneous. An additional task of the physical module is setting the state of the channel as busy or idle according to the sensed power compared to the antenna sensitivity level.
4.3. Description of Simulation Scenarios
The simulation scenario consists of a multi-hop VANET, where we analyzed the performance of the channel modeling techniques described in Section 3. We used the Multi-Metric Map aware (MMMR)routing protocol [
11], which is based on Greedy Perimeter Stateless Routing (GPSR) [
16]. MMMR is a delay-tolerant protocol that improves the next forwarding node decision by employing four metrics; the distance to the destination, the vehicle density, the vehicle trajectory and the available bandwidth. This multi-metric parameter is obtained by each node, and it is used to find the neighboring node that is the candidate for being the next forwarding node. The scheme is self-configuring and able to adapt to the changing vehicle density in real time.
We carried out several simulations using the Estinet Network Simulator and Emulator [
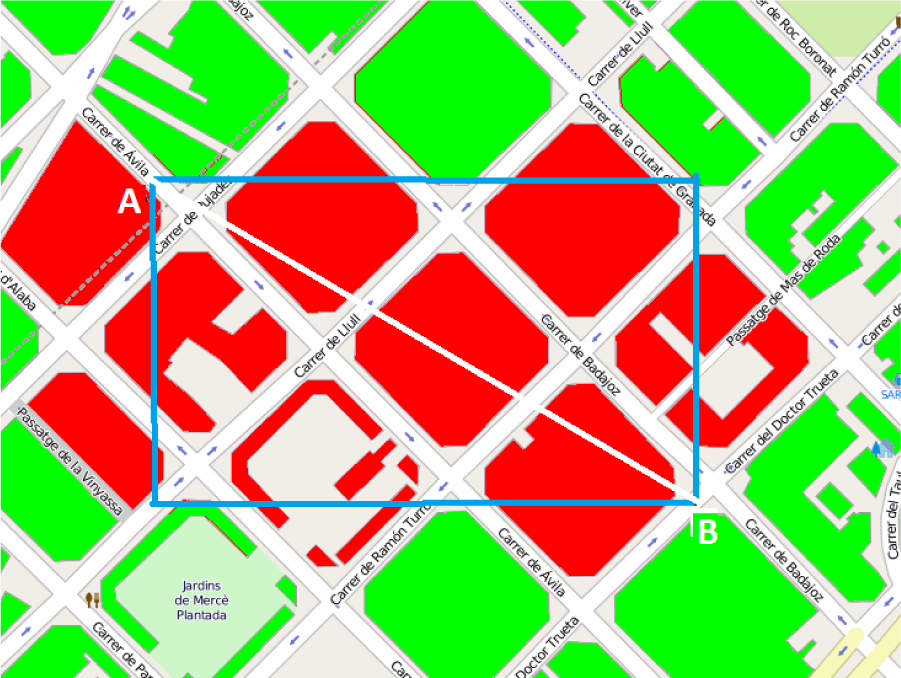
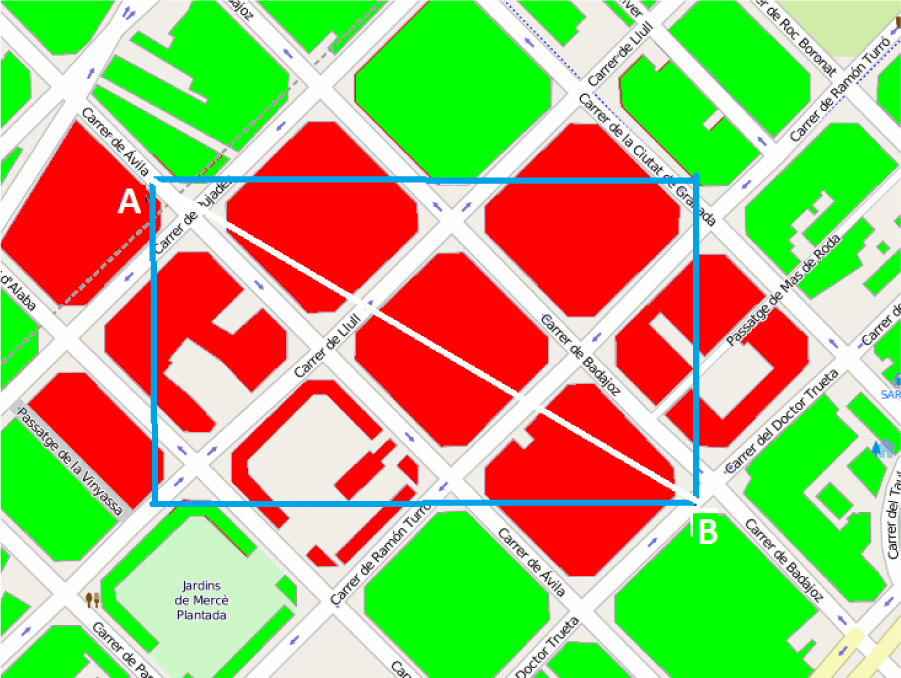
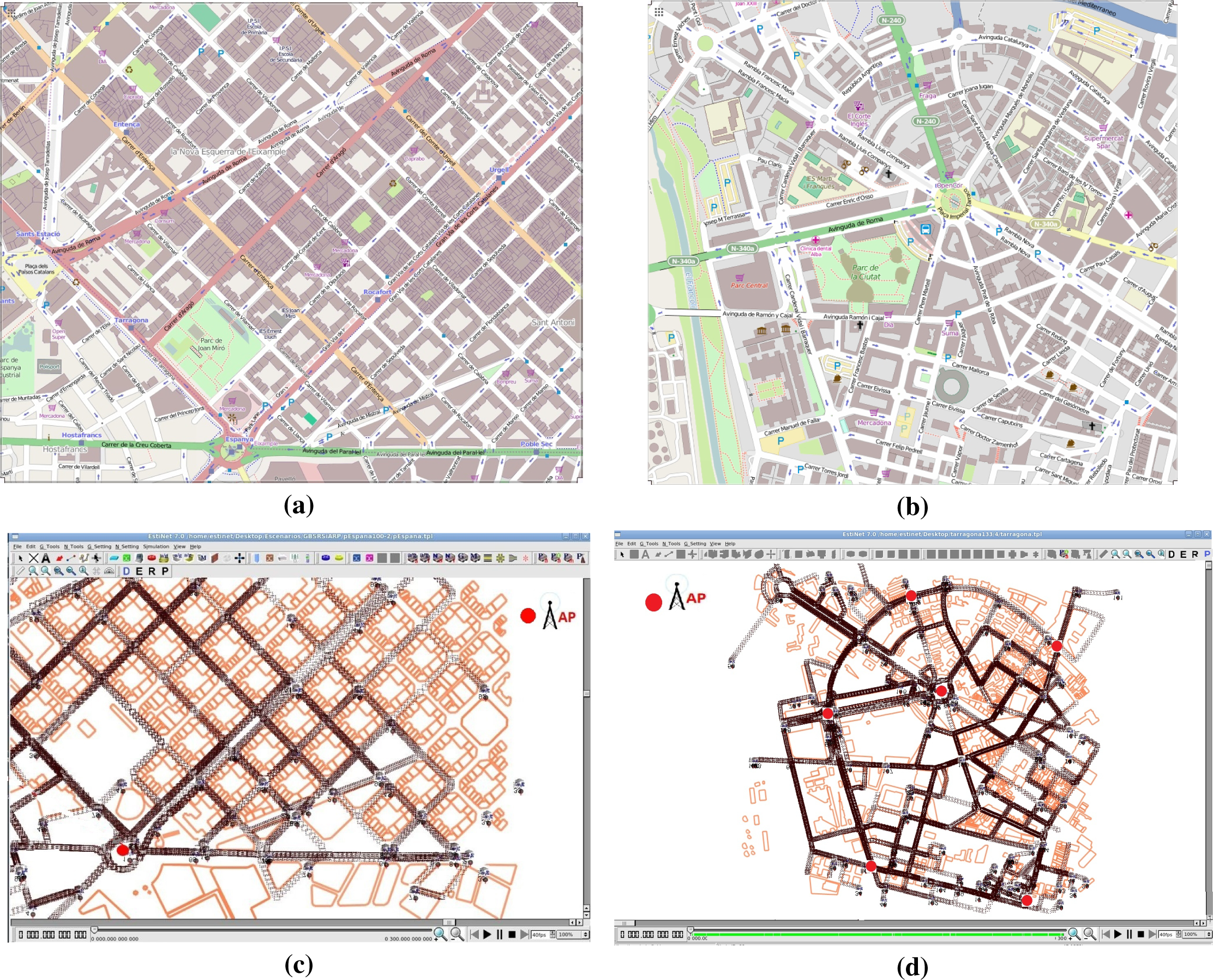
17]. Estinet includes the standard IEEE 802.11p and a simple and accurate way of designing VANET realistic scenarios. We used two real city areas of 1.5 and 2 km
2, obtained from the example district of Barcelona and the downtown district of Tarragona (see
Figure 7), to evaluate two urban areas formed by streets with different densities of crossroads and buildings. In our scenarios, the Barcelona area has almost 1.3-times per square kilometer more streets and junctions than the Tarragona area. Furthermore, The example district of Barcelona has a high density of buildings compared to downtown Tarragona, specifically around four-times higher for the selected areas. Seeking to simulate a realistic scenario, the mobility model was obtained from CityMob for Roadmaps (C4R) [
19], which is a mobility generator that uses the Simulation of Urban MObility (SUMO)engine [
20]. C4R is able to import maps directly from OpenStreetMap [
6] and to generate Network Simulator 2 (NS-2) compatible traces. C4R considers random origins and destinations for each vehicle. These points are located with higher probability in areas specified by the user. The path for a specific start and end point is computed through Dijkstra’s algorithm in a directed graph (as a GPS-based navigation system computes a route). SUMO provides a realistic driver behavior in the route followed by a car during a movement simulation. We exported the NS-2 traces to Estinet, including the building information (orange lines, see
Figure 7) using our own translating software, available at
www.lfurquiza.com/research/estinet [
18].
The scenarios also consist of fixed nodes, which are henceforth called access points or APs. The AP enables the connection, directly or by using multiple hops, to the services in the network. The Barcelona scenario only includes one AP (see
Figure 7c), while the Tarragona area has six access points (see
Figure 7d). We considered four vehicle densities of 67, 100, 133 and 167 cars per km
2. Each of these densities could represent different situations of a day; for instance, early morning, night, morning/afternoon and rush hour. The objective of using four arbitrary different densities is to test if the difference among the results coming from the models depends on the density of the scenario. A high vehicle density helps to avoid discarding packets, since a suitable next forwarding hop would surely be always available; however, data transmissions would be more prone to interference.
Each node during the simulations sends 1000-byte packets to the destination APs, during 300 s. In the case of Barcelona, the inter-packet time follows a uniform distribution between 2 and 6 s that has a mean of 4 s. On the other side, in the Tarragona scenario, we consider that this time is exponentially distributed with a mean of 4 s, but truncated between 1 and 10 s.
All of the results are presented with confidence intervals (CI) of 95%, obtained from ten simulations per each density value and attenuation model using ten different movement traces. This means that we generated ten different movement traces per density and scenario. We use each of them to evaluate the three attenuation models.
Table 1 summarizes the main simulation settings.
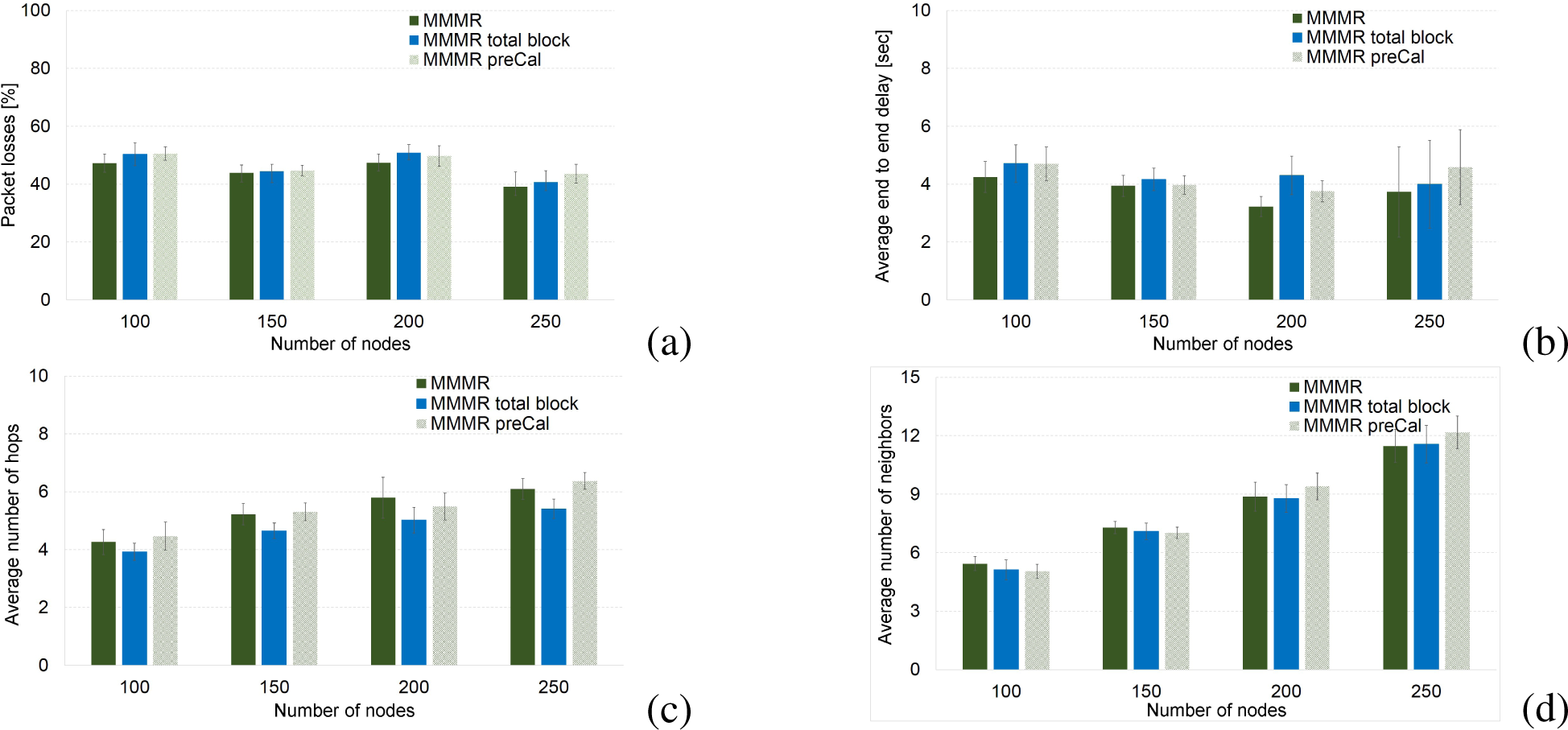
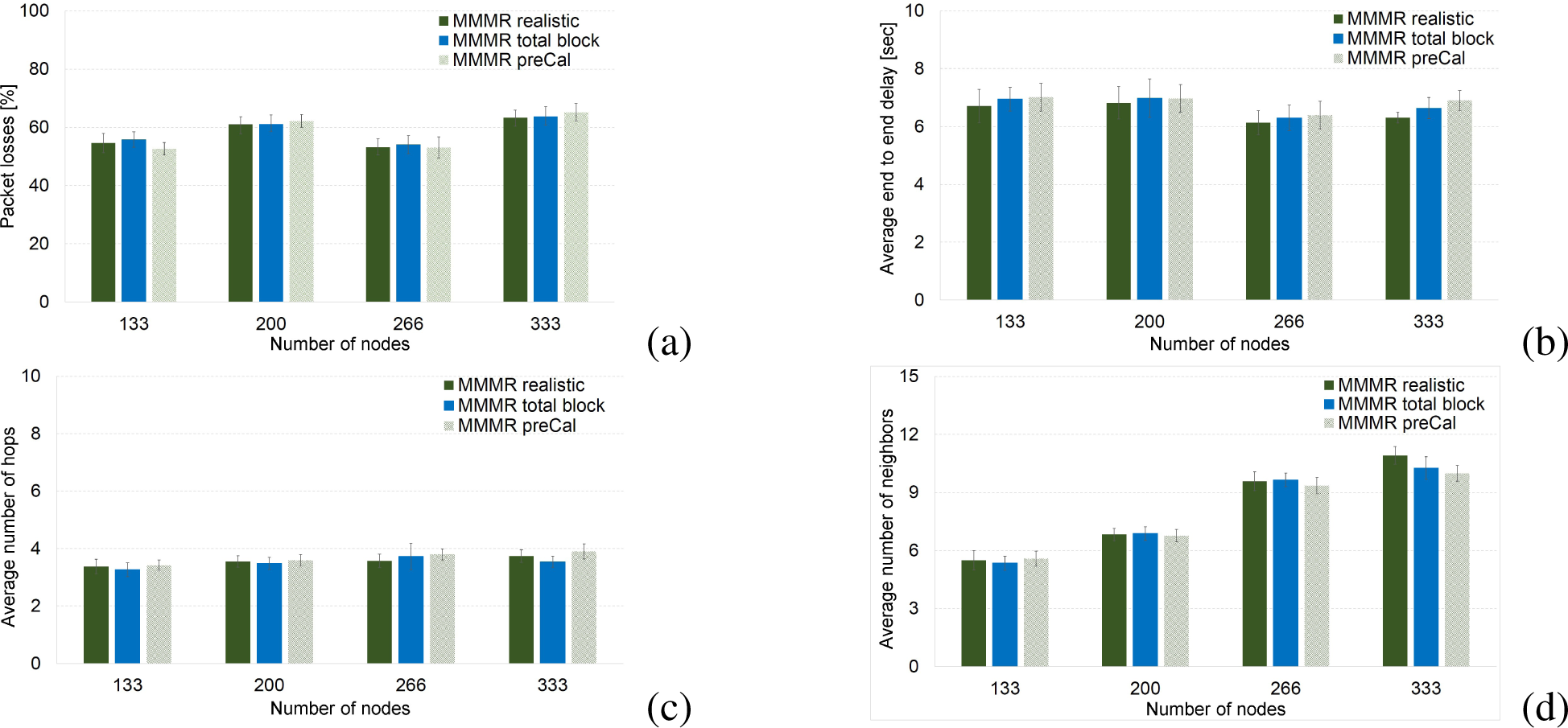
4.4. Simulation Results
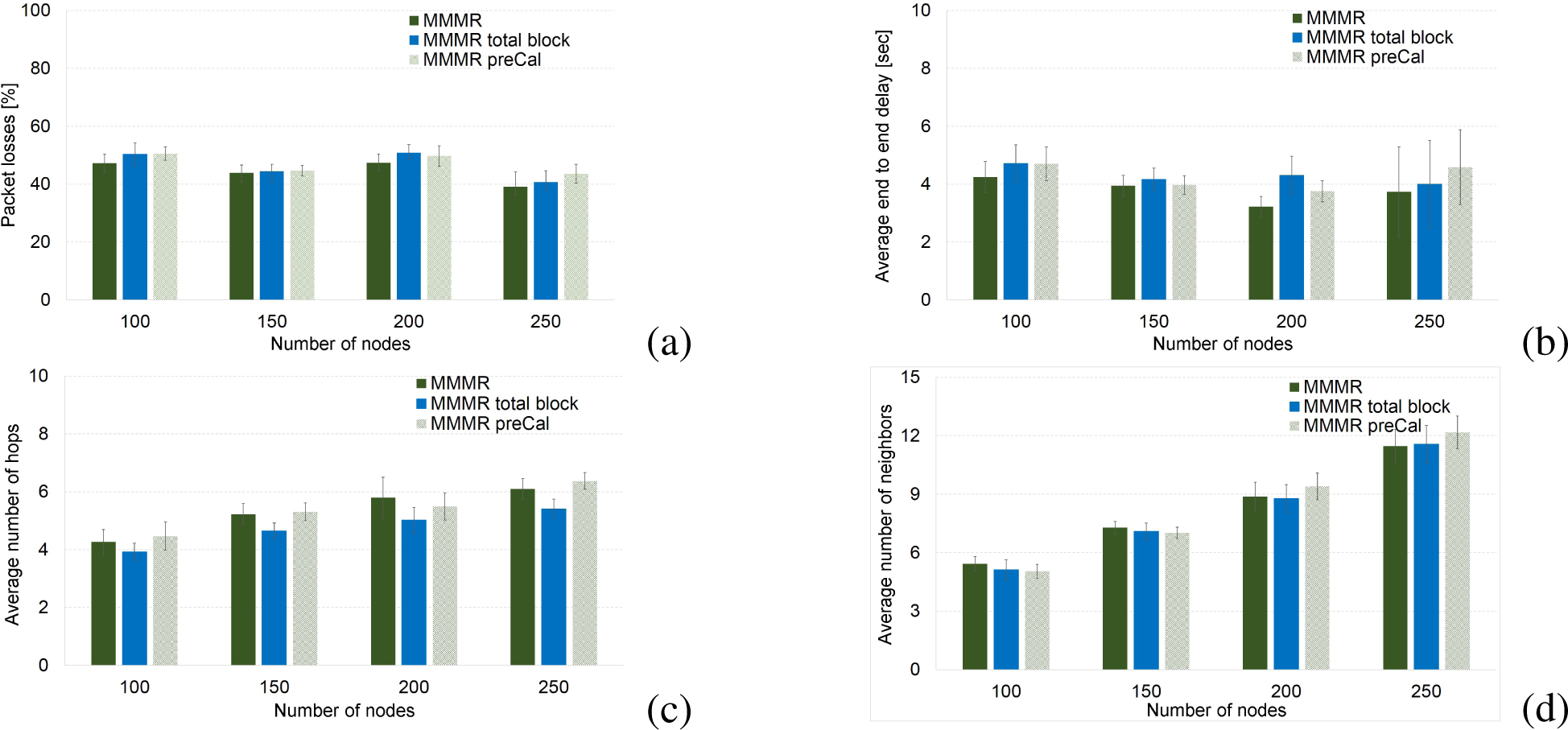
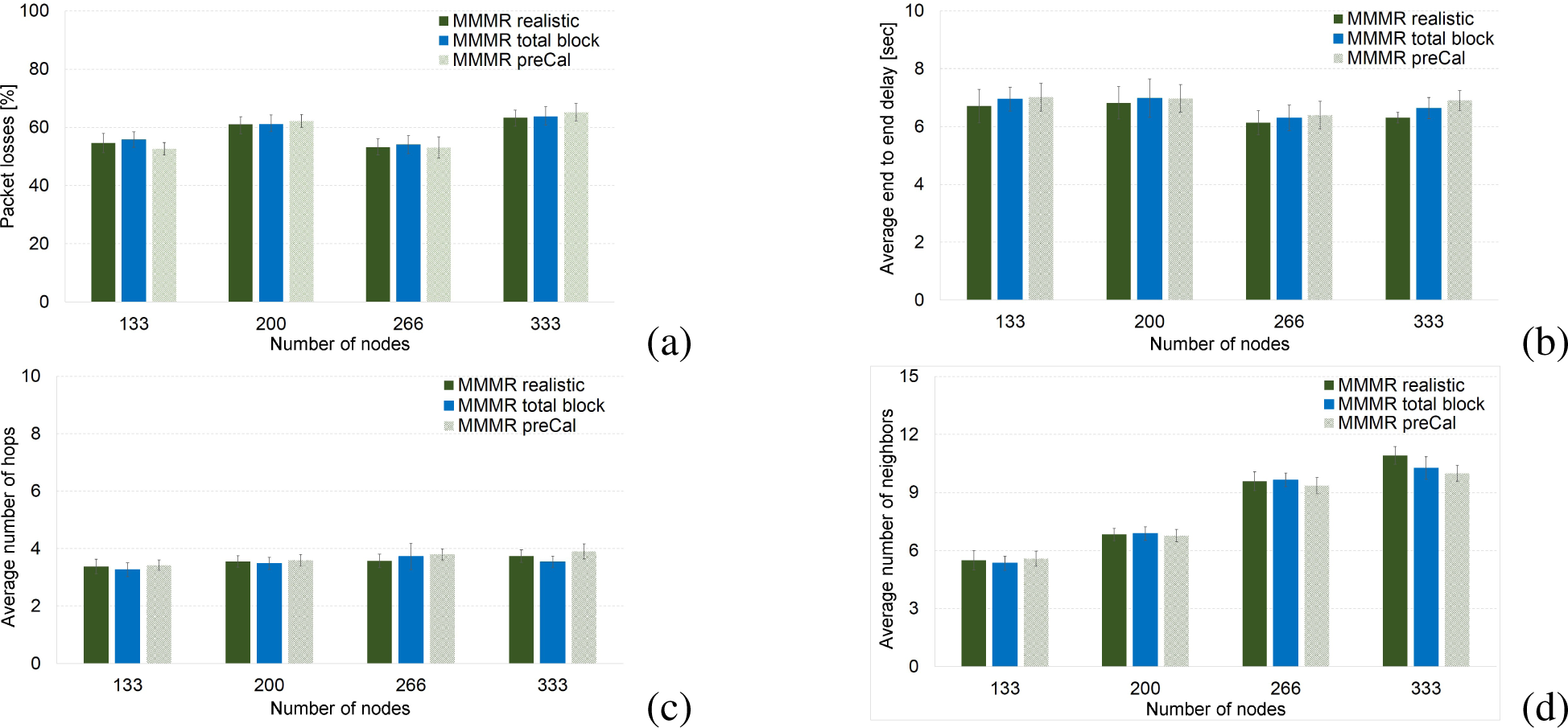
In this section, we present some results from comparing the simulations of the three aforementioned attenuation models: realistic, total blockage of signal and pre-computed attenuation. The evaluation is focused on four widely-used metrics applied to the performance analysis of VANET routing protocols. These metrics are the percentage of packet losses, average delay, average number of hops and average number of neighbors.
Figures 8 and
9 illustrate these results for the four node densities in the two scenarios.
The mixed ANOVA statistical test [
21] was employed to check if the performance metrics differences among attenuation models depends on the vehicle density in the evaluated area. There might be a relationship since a great number of nodes may generate more collisions and higher levels of interference. We use mixed ANOVA, because for each vehicle density, the same ten vehicle movements were used to test the attenuation models. For mixed ANOVA, our data are organized into twelve groups that are obtained by combining the three building attenuation models with the four vehicle densities in the simulation. All groups have the same number of elements, which allows one to have a balanced test. The outcome of the statistical test is a probability called the
p-value, which is compared with a threshold named the significance level. If the
p-value is lower than the significance level, then the performance results of the system are related to both the attenuation model and the vehicle density.
The
p-values, which we obtained from checking the dependency between the attenuation model and the vehicle density, are depicted in
Table 2, where the F-ratio is the result of the F-test statistical test [
22], df represents the degrees of freedom used to obtain the
p-value and partial
η2 is a measure of the effect size. According to the results of the Mixed-ANOVA, we can conclude that there is no significant interaction between the attenuation models and the vehicle density, since the
p-value is lower than 0.05 in none of the performance metrics for both scenarios, except for the average number of neighbors. Mixed ANOVA assumes that the data come from normally-distributed populations with a homogeneous variance and similar covariance and sphericity (differences between all possible pairs of groups are equal). Some of the twelve data groups of our performance results violate some of these assumptions, especially normal distribution and homogeneous variance. However, our test results can be considered reliable, because ANOVA is robust to these assumptions [
23], especially under the balance number of elements in each group [
24].
When there is not a significant dependency between the factors in the mixed ANOVA, as happens in our study between attenuation models and vehicle density for the percentage of packet losses, average end-to-end delay and average number of hops, the
post hoc tests,
i.e., repeated measures ANOVA [
21], to study the attenuation model effects do not need to differentiate between the vehicle densities. On the other hand, the
post hoc tests for the average number of neighbors metric have to be done for each vehicle density independently. According to mixed ANOVA results, the differences among these metrics depend on the vehicle density used in the simulation.
Due to the
post hoc test (ANOVA with repeated measures), it is required to meet the same assumptions of mixed ANOVA, and even when this test is robust to violations of these assumptions, we decided to apply the equivalent non-parametric tests to assess the difference among the attenuation models, because our data conform to their requirements. For our data, both kinds of tests, parametric and non-parametric, agree with the same decision in all of the
post hoc tests performed in this work. There is not a well-accepted non-parametric statistical test equivalent to mixed ANOVA.
Table 3 shows the
p-values obtained from the Friedman test [
22], which is the non-parametric version of ANOVA for repeated measures. It is used to know if there are statistically significant differences among the building attenuation models.
As the reader can notice, none of the
p-values of
Table 3a (Barcelona scenario) are higher than the significance threshold of 0.05, except the average number of neighbors for a vehicle density of 100 cars/km
2. Hence, this means that there is a statistically significant difference among the distribution of the results obtained when the simulation uses different building attenuation models, excluding the average number of neighbors for a vehicle density of 100 cars/km
2. All of these differences,
i.e., the percentage of packet losses, average end-to-end delay and average number of neighbors, are not detected in the performance results of the Tarragona scenario. It can be seen in
Table 3b that the
p-values show significant differences in average delay and average number of hops. We would like to point out that even when the
p-value of mixed ANOVA (to test the interaction between the attenuation models and the vehicle density in the Tarragona scenario; see
Table 2b) is significant, the Friedman tests performed per vehicle density do not detect any difference in any of the cases. One reason that explains this result is that the effect size of the interaction is lower in the Barcelona scenario.
We used a pairwise comparison to determine the models among which there exists a difference in terms of the performance results.
Table 4 shows the
p-values for this comparison by using the Wilcoxon statistical test [
22]. We employed the Bonferroni correction in these pairwise comparison. That is, the new significance threshold is 0.017, obtained by dividing 0.05 by the number of options compared (
i.e., 0.05/3).
From
Table 4a for the Barcelona scenario, we can see that the results of the performance metrics are significantly different (see Rows 1,4 and 7 and 16) if we model the effects of building presence as the total absence of communication, compared with the results obtained with a realistic channel model, specifically designed for VANETs. Comparison between these two models in the Tarragona scenario shows significant differences in the average number of hops (see the fourth row in
Table 4b). Moreover, the total signal blocking always shows the most conservative behavior. This can be noticed in the values of the column of the median of the differences in both
Table 4a and
4b). This behavior makes total sense, since this model involves nodes sensing fewer neighbors (vehicles cannot detect nodes behind obstacles in any case under the total-blockage attenuation model). Additionally, the absence of communications avoids the construction of paths that in a realistic approach may be feasible. Consequently, packets need to be stored in nodes for longer periods until finding a forwarding node, so the percentage of packet losses increases due to the timeouts. Notice that in the Barcelona scenario, the differences in the average number of neighbors are only detected in the high density case.
This behavior is explained by the communications between obstructed nodes not being the rule, and most of them entail high error probabilities. As a consequence, the differences in the performance metrics are small in our simulations scenarios, as is shown in the column of the reported medians.
Regarding the comparison between the realistic channel model and the pre-computed attenuation approach, it can be noticed (see Rows 8, 14 and 17 in
Table 4a) that there is no statistically significant difference in the average number of hops or neighbors. Nevertheless, there are discrepancies in the percentage of packet losses and in the average end-to-end delay (see Rows 2, 5 of
Table 4a). Notice that there is a difference in the average number of neighbors for a density of 67 vehicles/km
2. Similar results are obtained from Tarragona scenario (See
Table 4b), but in this case, there are only significant differences in the average end-to-end delay and the average number of hops.
For both scenarios, the median of the pre-computed attenuation performance results are not so far from the medians in the realistic scenario. The presence of differences between the aforementioned models is a consequence of the discretization process done in the pre-computed attenuation approach.
Lastly, total blockage and pre-computed building attenuation models are compared in order to get an idea of the existing differences between these approaches and the realistic channel model. The reader can observe from
Table 4a in the case of the Barcelona scenario and
Table 4b for Tarragona that there are statistical differences in the average number of hops of a packet when traveling to reach the access point. Furthermore, differences in the average number of nodes between these two models appear only for the two highest densities applied in this work (133 and 166 nodes/km
2) in the Barcelona scenario. Hence, the results obtained with these two models could be similar, at least in the percentage, to the packet losses and delay.
To conclude this section, we summarize the major features and results drawn from our evaluation:
We have simulated three building attenuation models used in the literature for VANETs (i.e., realistic, total blocking of the signal and the precomputed attenuation model) under two realistic urban scenarios that have different vehicle densities, junctions and buildings. The study considered four different vehicle densities with ten different mobility traces per density. Moreover, different probability distributions for traffic generation were used in each urban scenario.
The results of statistical tests carried out with four performance metrics (percentage of packet losses, end-to-end delay, average number of hops and neighbors) show differences when employing different attenuation models.
A complete attenuation of the signal due to the presence of buildings, and pre-computed attenuation models in our simulations can be considered for both scenarios as pessimistic bounds for all performance metrics.
We did not find that the differences in the performance metrics are affected by the vehicle density employed during the simulation, except in the case of the average number of neighbors. This metric does not differ from the realistic one with intermediate vehicle density scenarios.
These are promissory results, because they lead to the idea of using the total signal attenuation model or pre-computed attenuation files when a realistic attenuation model is difficult to use; for instance, for map areas where building information is not available and a complete blockage outside the street has to be assumed. Pre-computed attenuation files would be a good alternative when scenarios involve a medium or high data traffic load, especially in preliminary studies. Such scenarios require that algorithms to calculate the level of attenuation caused by buildings are executed too many times. This can cause important time consumption due to the number of operations, even when such algorithms are efficient.


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}