1. Introduction
Active suspension systems, represented by air suspension and hydraulic suspension, have gained increasing popularity among automotive manufacturers and consumers due to their wide adjustment range, fast response speed, and high ride comfort. However, these systems also have drawbacks, such as high sealing requirements and energy consumption, particularly exhibiting slow response during vehicle lift and lower control. In recent years, linear motors have emerged as a promising actuator technology, offering advantages such as rapid response speed, high adjustment accuracy, and stable force output [
1,
2,
3]. This has gradually attracted the attention of researchers and automotive manufacturers. Currently, linear motors are widely used to improve the ride smoothness of vehicles. However, due to fluctuations in the thrust of linear motors and limitations of control algorithms, it is rare to see the research of linear motors applied to vehicle height control.
To address the improvement in electromagnetic thrust fluctuations and enhance the performance of electromagnetic thrust [
4,
5], some experts and scholars have approached the issue through structural design. Li Jing et al. [
6] proposed a modular permanent magnet linear synchronous motor structure with 16 poles and 18 slots, introducing a new end tooth design that enhances the average thrust. Lan, Zhiyong [
7] proposed a V-shaped tooth–slot structure to suppress and reduce electromagnetic thrust fluctuations in PMLSMs; the coil structure is also changed from rectangular to V-shaped coils meeting the same angle as the V-shaped tooth–slot. Meanwhile, the specific slot design is implemented using the infinitesimal method. Fu, Dongshan et al. [
8] proposed a structurally simple novel flux-switching transverse flux linear motor. The results indicated that this method effectively reduced cogging force and improved thrust. Seal, Monojit et al. [
9] improved a four-stage tubular linear induction motor by enhancing the armature core structure. Preliminary testing yielded promising results, demonstrating improved performance. Mahdy, Araby et al. [
10] optimized a multi-objective framework by integrating various multi-objective optimization strategies to minimize deflection and manufacturing costs to the greatest extent possible. From previous research, it is evident that complex modifications have been made to the structure of linear motors. In contrast, this paper proposes a simpler armature slot design, that is, a rectangular groove with a flat mouth, which achieves favorable electromagnetic thrust performance while avoiding magnetic saturation phenomena.
In the field of control for permanent magnet synchronous linear motors, numerous scholars have conducted various studies. Finite-set model predictive control (FSMPC) [
11,
12], due to its strong constraint processing capability, optimization performance, and real-time capabilities, has become an important strategy in many modern control systems. This approach enables efficient handling of complex system dynamics and enhances the overall effectiveness of control solutions across various applications [
13,
14]. In order to realize body lifting, Yao JL et al. [
15] first designed a semi-active suspension with adjustable damping by using hybrid model predictive control, which was proved feasible by simulation, and then Yao JL [
16] proposed applying finite-set model predictive control to a linear motor to realize active body lifting, and the research results showed that good results were achieved in the subsequent body lifting control. However, mismatches in the parameters of the predictive model can lead to prediction errors, which in turn can significantly degrade the performance of the finite-set model predictive control. Therefore, He, Guofeng et al. [
17] proposed an Extended State Observer to accurately estimate disturbances in the system. The estimated disturbance values were incorporated into the finite-set model predictive control (FSMPC) controller, achieving parameter robustness. This approach enhances the controller’s ability to adapt to varying conditions and improves overall system performance by effectively compensating for unmodeled dynamics and external disturbances. In order to further improve the tracking accuracy of linear motor motion position and simplify the control structure, Li, Zheng et al. [
18] proposed a permanent magnet synchronous linear motor (PMSLM) position controller based on a model prediction algorithm, thus optimizing the control ability. Zhang, Yanqing et al. [
19] proposed a method called Model Predictive Control with Adaptive Sliding Mode Control, which enhances the robustness of finite-control-set model predictive control. Liu, Xing et al. [
20,
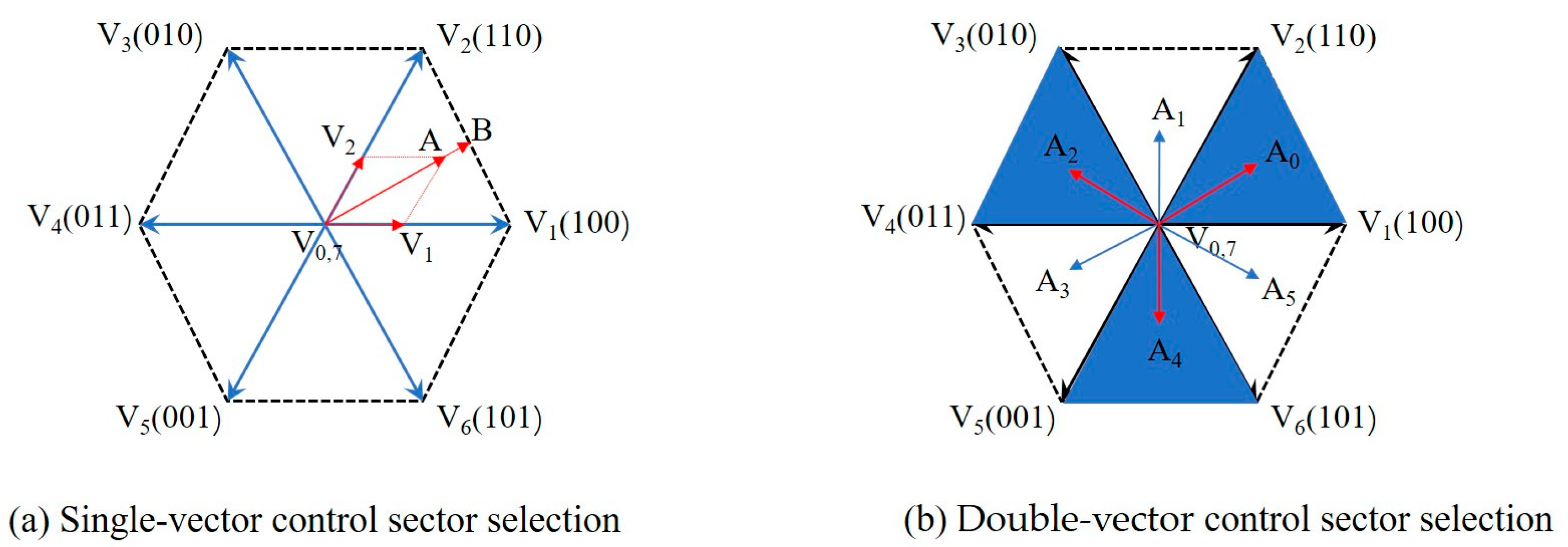
21] improved the event-triggered predictive control architecture for power converters by incorporating adaptive dynamic programming techniques and an event-triggering mechanism influenced by system uncertainties. Building on previous research, where control algorithms are often complex, this paper presents a double-vector control strategy that modifies the voltage selection method in the existing finite-control-set model predictive control (MPC). This strategy involves selecting voltage vectors twice within a single control cycle, with the second selection allowing for any direction. Consequently, this approach enhances the accuracy of voltage vector selection. Moreover, the method is straightforward and effectively reduces current fluctuations, thereby providing a solid foundation for precise motor control.
Building on the analysis and considerations outlined above, we first propose a flat rectangular slot structure suitable for permanent magnet synchronous linear motors. Second, we modify the finite-set model predictive control (FSMPC) by incorporating double-vector control, thereby altering the voltage selection process in traditional FSMPC. Finally, we implement this modified control strategy in an active suspension system to regulate the car body’s elevation to the target height. This approach not only reduces energy consumption but also enhances the car body’s responsiveness and ability to maintain the target height. Our method offers novel insights for improving vehicle stability and energy efficiency.
The subsequent sections are organized as follows:
Section 2 shows the design of the main structural parameters of the linear motor;
Section 3 shows the design of the permanent magnet synchronous linear motor double-vector control strategy;
Section 4 details the body height controller design;
Section 5 is the simulation result analysis; and
Section 6 offers the conclusion and discussion.
4. Body Height Controller Design
In order to illustrate the above elevating control, the model of a one-quarter vehicle damping adjustable vibration system is first established. According to Newton’s law of acceleration, the following differential equation is obtained:
where
is the unsprung mass,
is the sprung mass,
is the unsprung mass displacement,
is the sprung mass displacement,
is the unsprung mass velocity,
is the sprung mass velocity,
is the unsprung mass body acceleration,
is the sprung mass body acceleration,
is tire stiffness,
is spring stiffness,
is the damping coefficient, and
is the control force that generates the lifting of the car body. In order to facilitate calculation and modeling, the controlling force direction is stipulated to be consistent with the lifting direction of the vehicle body. The mathematical model of filtering white noise is as follows:
, where
is the empirical value obtained from experiments on different pavements,
= 0.1303 for Class B pavements and
= 0.12 for Class C pavements, and
is white noise.
The overall structure of the height control system is designed using a hierarchical approach, with the principle block diagram shown in
Figure 5. When the vehicle encounters rugged or special terrain that requires adjustment of body posture, the body controller detects the target height.
First Level: Based on the road excitation signal q collected in real time and the thrust state of the linear motor, the vehicle dynamics model dynamically determines the actual height z2. Through the proportional integral (PI) controller, the error adjustment is made between the calculated height z2 of the model and the set target height z2* (including the tuning of proportional and integral parameters), and the optimal Q-axis current reference value iq* is generated. This provides the current leading component for double-vector control.
Second Level: By the PI controller, the D-axis current is stabilized at 0 A to achieve magnetic field orientation, and the Q-axis current is input into the cost function as the main control to optimize current control and output three-phase voltage. After that, the three-phase voltage is input into the inverter, and the pulse width modulation current in the A-B-C coordinate system is output. After the conversion between the d-q coordinate system of the current (direct axis and alternate axis) and the a-b-c coordinate system (phase current), the input is entered into the prediction model. Based on the current prediction model, the predicted current value of the next control period is obtained by performing a double-voltage-vector transformation. Finally, the deviation between the predicted current and the reference instruction is re-injected into the value function to realize dynamic rolling optimization and ensure the optimality of the switching signal.
Third Level: The high-precision inverter currents drive the permanent magnet synchronous linear motor (PMSLM) to generate adjustable electromagnetic thrust, which is converted into body displacement through the vehicle dynamic model. Force–displacement closed-loop control enables autonomous height adaptation under complex road conditions.
5. Simulation Result Analysis
To validate that the proposed double-vector control strategy has a significant effect on the elevation of the vehicle body, reduces fluctuations, and improves response speed, simulations were conducted using Matlab/Simulink. The target vehicle height was set to 0.1 m, and the simulation time was set to 30 s.
The parameters of the vehicle model are as follows in
Table 4.
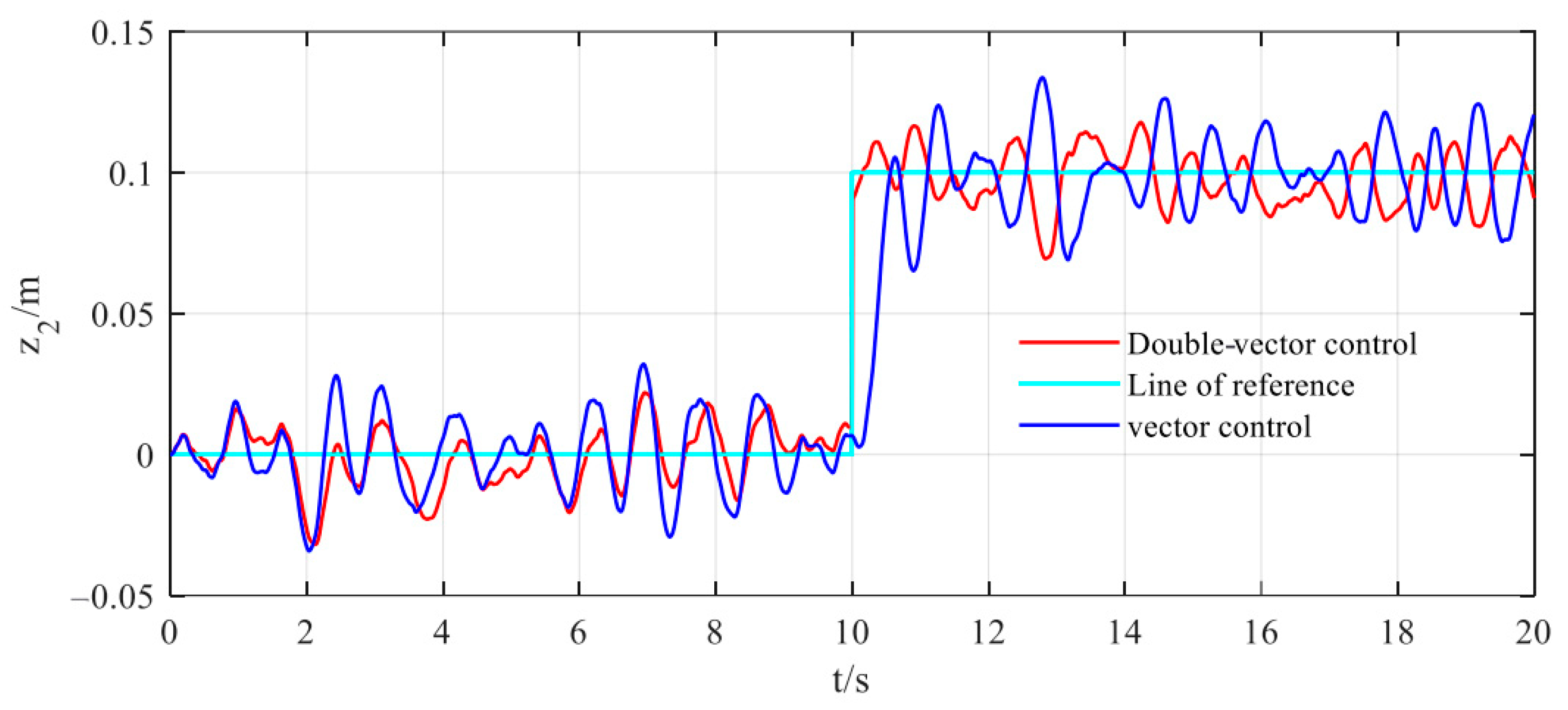
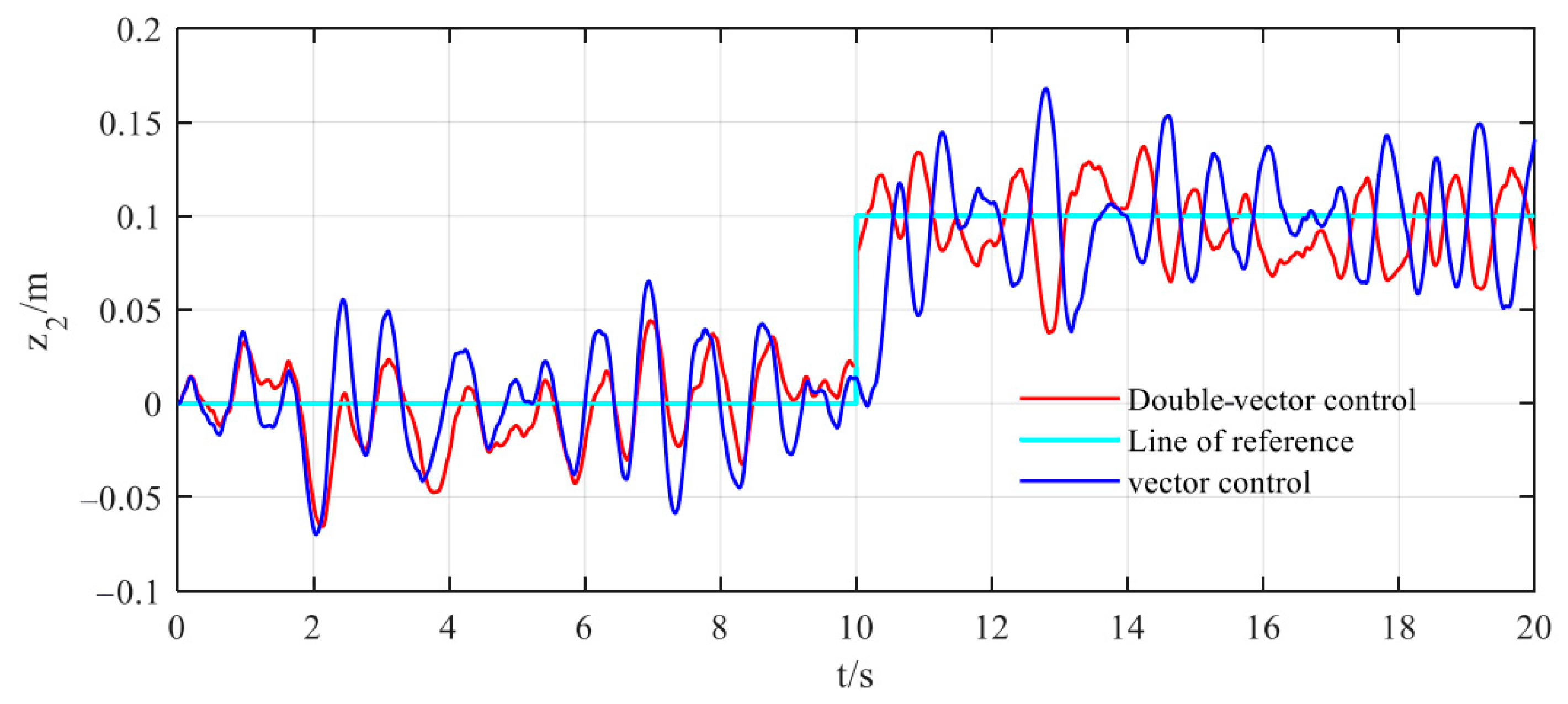
Simulation Condition 1: Control of the vehicle’s ascending motion. The target height of the vehicle is set at 0.1 m, with a speed of 20 m/s. The input excitation is set to Class B road conditions, and the simulation time is set for 20 s. At the 10 s mark, ascending control is implemented to drive the vehicle upward, and it ends at the 20 s mark. The simulation results are shown in
Figure 6.
It can be seen from
Figure 6’s sprung mass displacement that, within the first 10 s, the vehicle height fluctuates around the equilibrium position. At the 10 s mark, when adjusting the vehicle height, firstly, the fluctuation range of the vector control is approximately 0.065 m to 0.134 m, while the fluctuation range of the double-vector control is between 0.069 m and 0.118 m; the fluctuation amplitude has been reduced by about 70%. Secondly, the double-vector control reaches the target height within 0.15 s, whereas the vector control takes 0.56 s to reach the target height; the response speed has increased by about 23%. This indicates that the double-vector control has a significant effect on the smoothness of vehicle control. Furthermore, as evidenced in
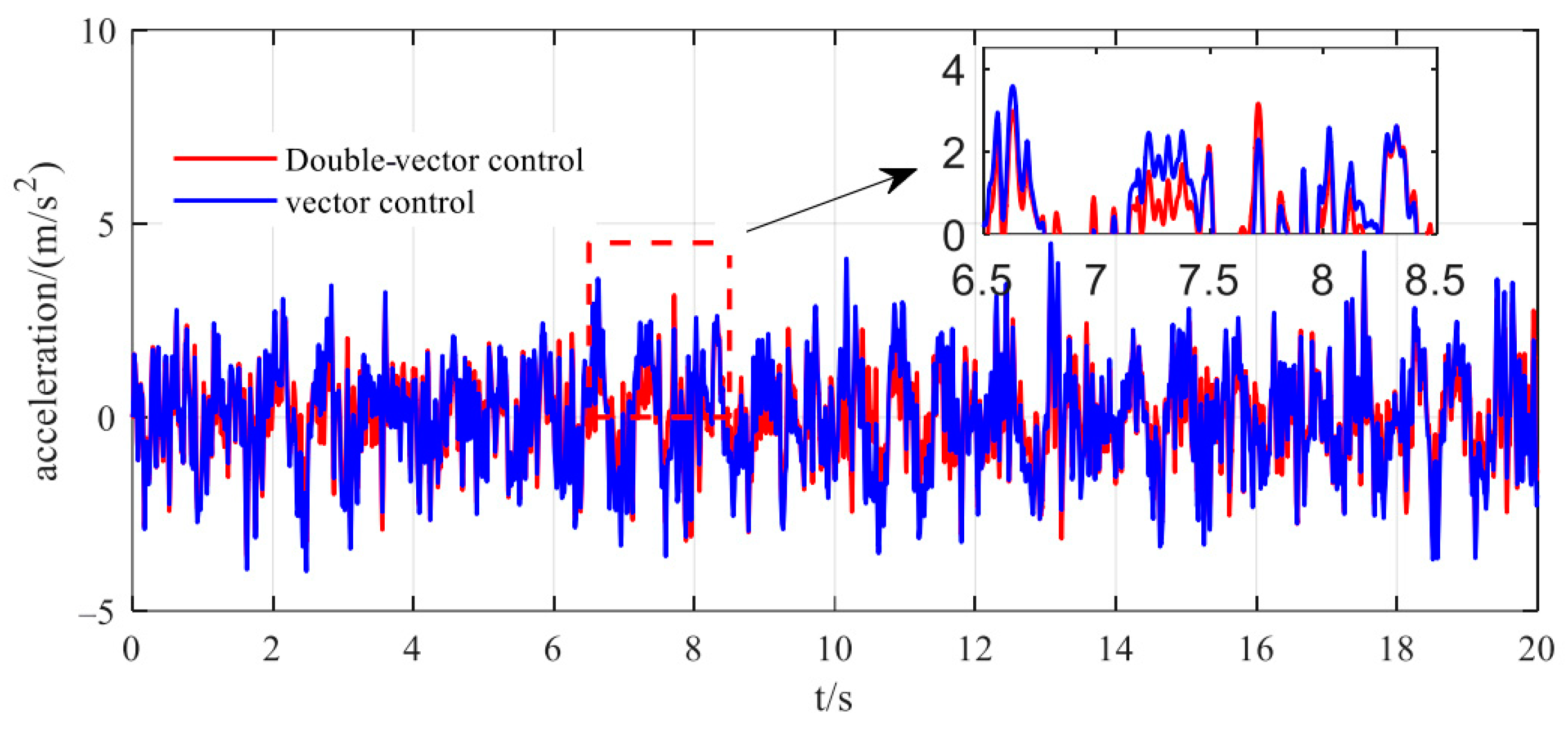
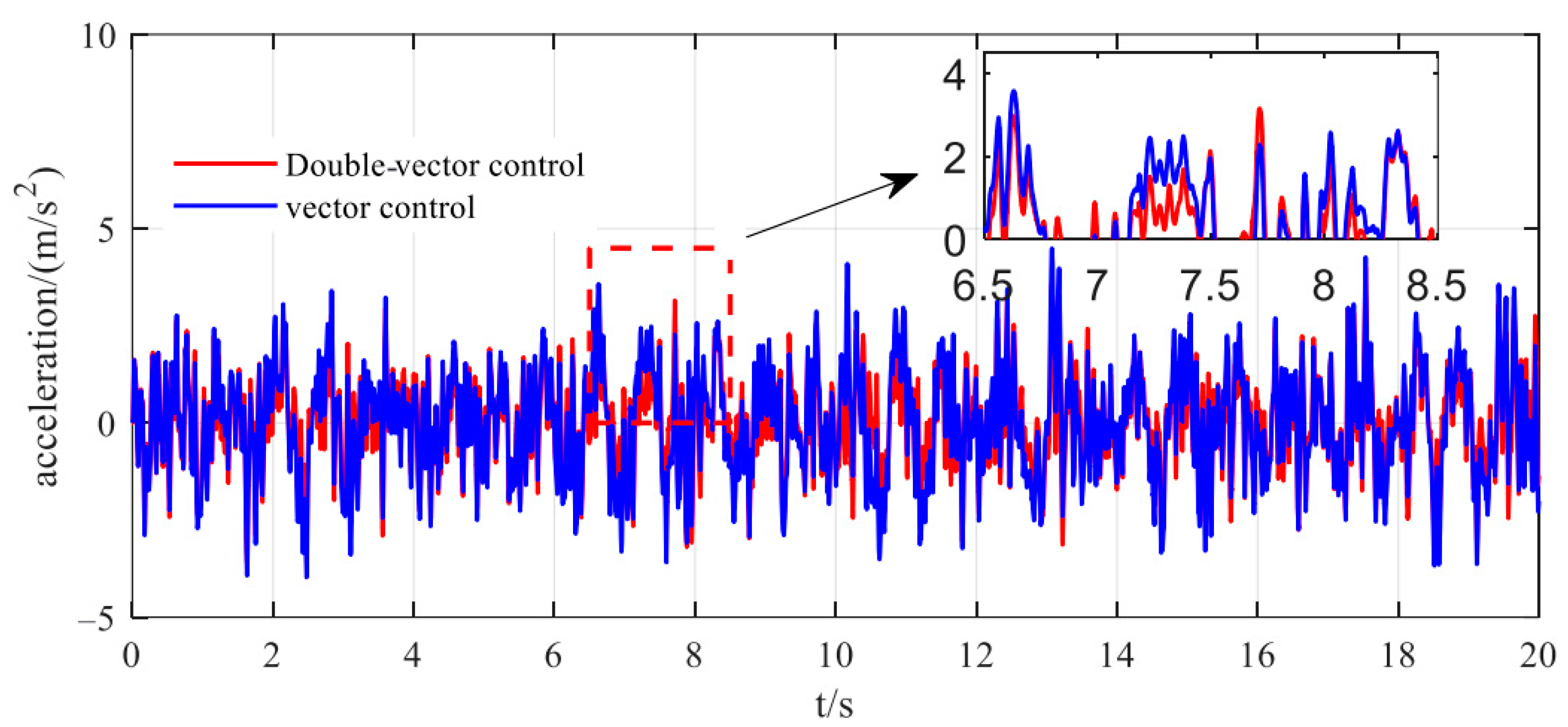
Figure 7, the double-vector control strategy demonstrates superior performance over conventional vector control, reducing peak vertical body acceleration by 21.3% (from 3.8 m/s
2 to 3.2 m/s
2) and improving vehicle ride comfort through a 17.6% decrease in Root Mean Square (RMS) values. The dynamic response characteristics in
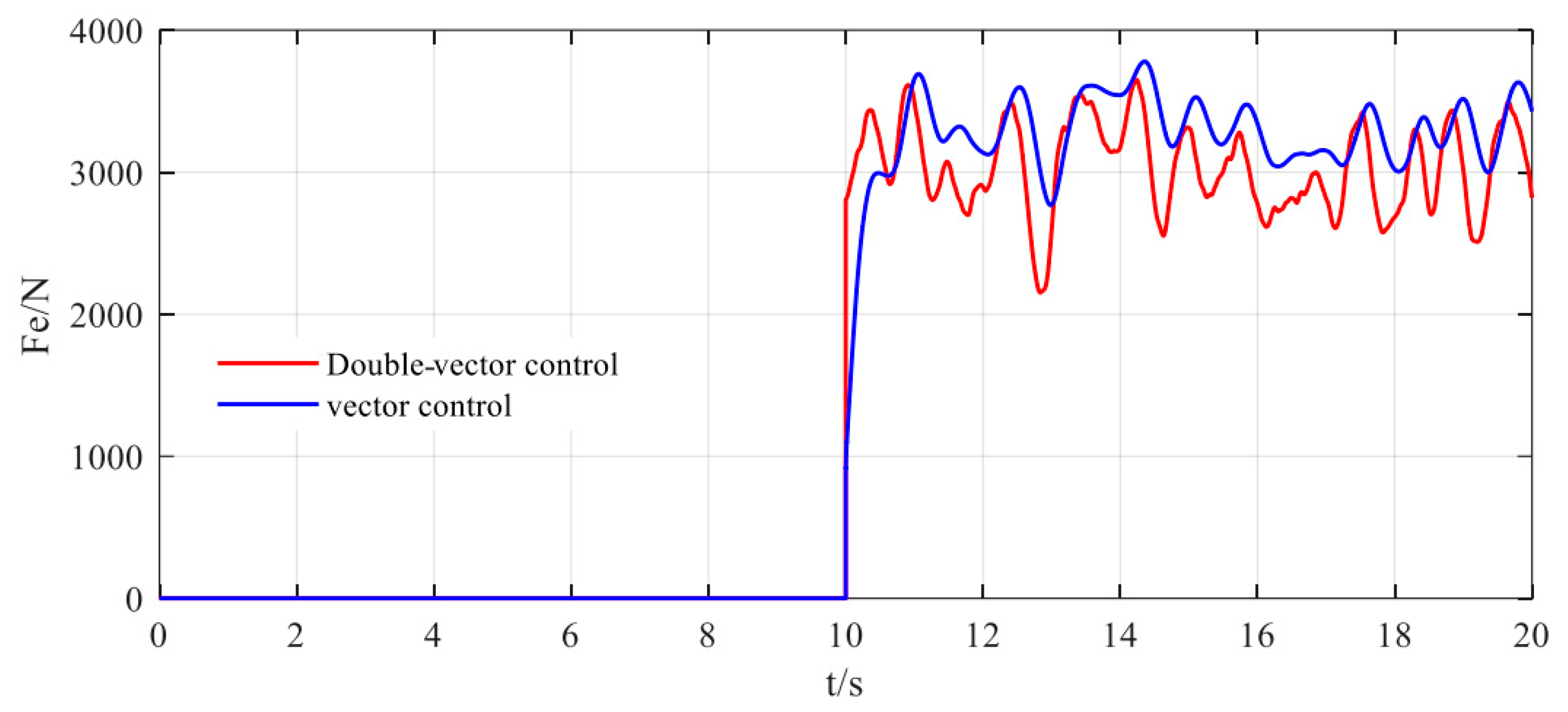
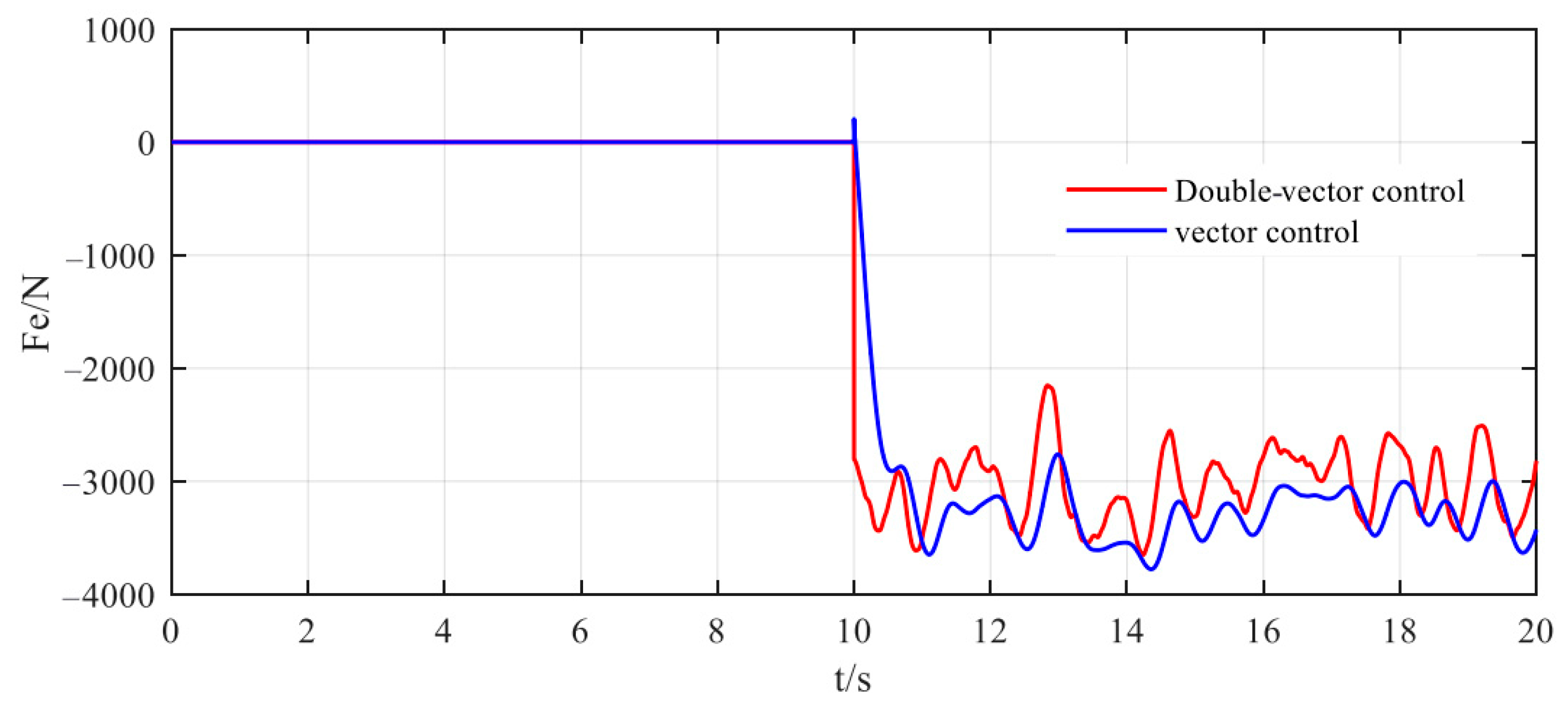
Figure 8 reveal that the double-vector system achieves a stabilized electromagnetic thrust output within 150 ms (mean: 3300 ± 35 N), representing a 5.7% reduction in required thrust compared to conventional vector control (mean: 3500 ± 42 N), confirming the strategy’s energy-saving efficacy. In order to facilitate understanding, an optimization performance comparison of vector control and double-vector control is made in
Table 5.
Simulation Condition 2: Control of the vehicle’s descending motion. The target height of the vehicle is set at −0.1 m, with the driving speed and road excitation conditions consistent with those of Simulation Condition 1. The simulation time is still set for 20 s. The difference is that descending control is implemented at the 10 s mark; it ends at the 20 s mark. The simulation results are shown in
Figure 9,
Figure 10 and
Figure 11.
First,
Figure 9 shows the displacement of the sprung mass. It can be observed that the effect of reducing the fluctuation amplitude is most significant;
Figure 10 and
Figure 11 illustrate the response curves of electromagnetic thrust and vehicle acceleration, which are generally consistent with Simulation Condition 1. Therefore, when we convert the vehicle’s ascending control into descending control, the double-vector control strategy maintains regulation performance in both electromagnetic thrust and vertical acceleration. In order to facilitate understanding, an optimization performance comparison of vector control and double-vector control is made in
Table 6.
Simulation Condition 3: Control of the vehicle’s ascending motion. The target height of the vehicle, road excitation, simulation time, and lift/drop timing are all the same as in Simulation Condition 1. However, the driving speed is increased to 30 m/s. The simulation results are shown in
Figure 12,
Figure 13 and
Figure 14.
Figure 12 shows the displacement of the sprung mass; it can be observed that during the vehicle’s ascent, the fluctuation in vector control ranges from approximately 0.063 m to 0.137 m, while the fluctuation in double-vector control ranges from 0.067 m to 0.118 m, and so the fluctuation amplitude has been reduced by about 70%. Additionally, double-vector control reaches the target height within 0.15 s, whereas vector control takes 0.56 s to reach the target height, leading to an improvement in response speed of approximately 23%.
Combining this with Simulation Condition 1, it can be concluded that this control algorithm maintains a good fluctuation reduction capability and response speed even at different vehicle speeds. Furthermore, as the speed increases, the fluctuations in vector control also increase, resulting in larger amplitude variations, while double-vector control exhibits minimal changes. From
Figure 13 and
Figure 14, the response curves for vehicle acceleration and electromagnetic thrust remain consistent with those in Simulation Condition 1. Therefore, even when the vehicle speed is increased, the desired vehicle height can still be achieved. In order to facilitate understanding, an optimization performance comparison of vector control and double-vector control is made in
Table 7.
Simulation Condition 4: Control of the vehicle’s ascending motion. The target height of the vehicle, simulation time, and lift/drop actions are all the same as in Simulation Condition 1, while the road excitation is changed to Class C. The simulation results are shown in
Figure 15,
Figure 16 and
Figure 17.
From
Figure 15, it can be concluded that during the vehicle’s ascent, the fluctuation in vector control ranges from approximately 0.038 m to 0.168 m, while the fluctuation in double-vector control ranges from 0.039 m to 0.137 m, resulting in a reduction of about 75% in fluctuation amplitude. Therefore, as the vehicle speed increases, the effectiveness of double-vector control in suppressing the displacement of sprung mass becomes increasingly evident. Additionally, double-vector control reaches the target height within 0.37 s, whereas vector control takes 0.92 s to achieve the same height, yielding an improvement in response speed of approximately 23%.
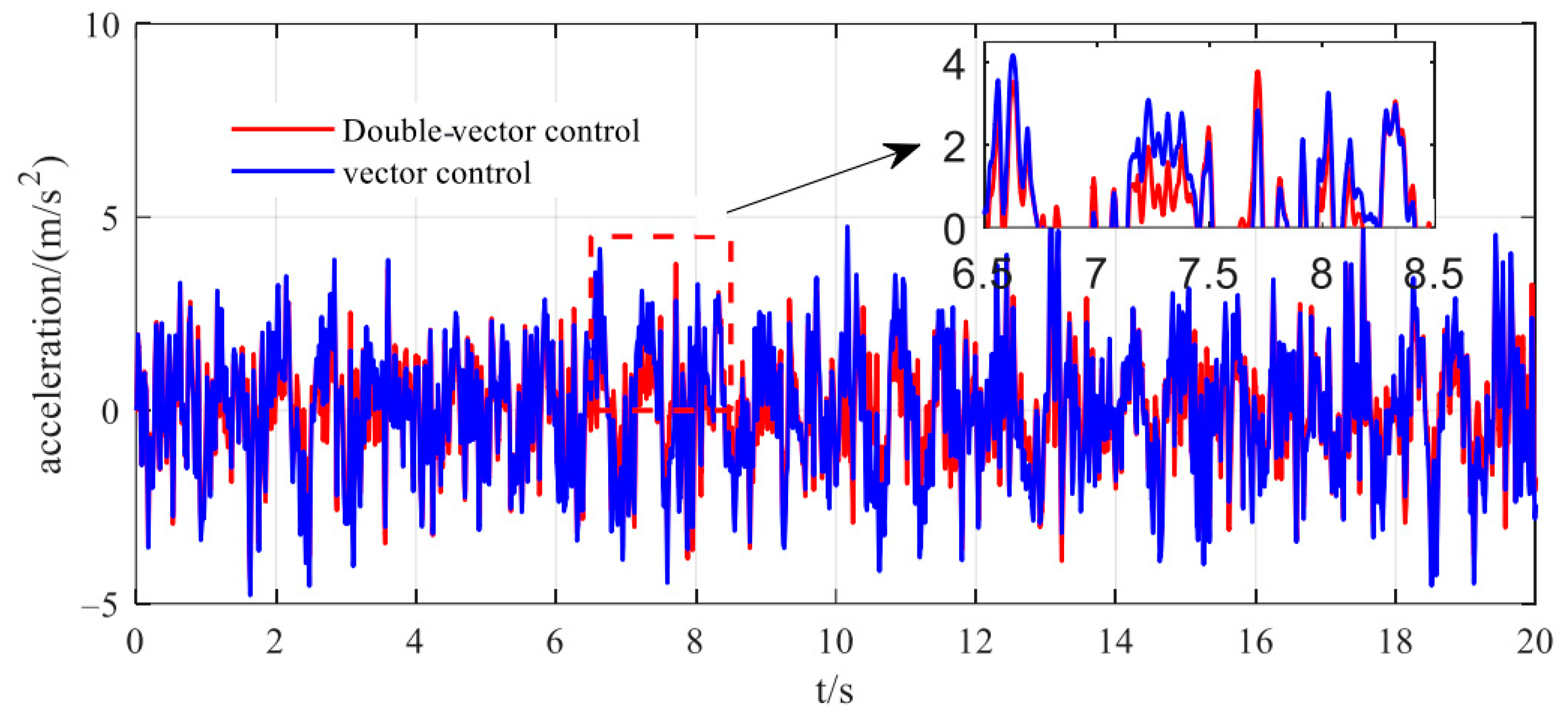
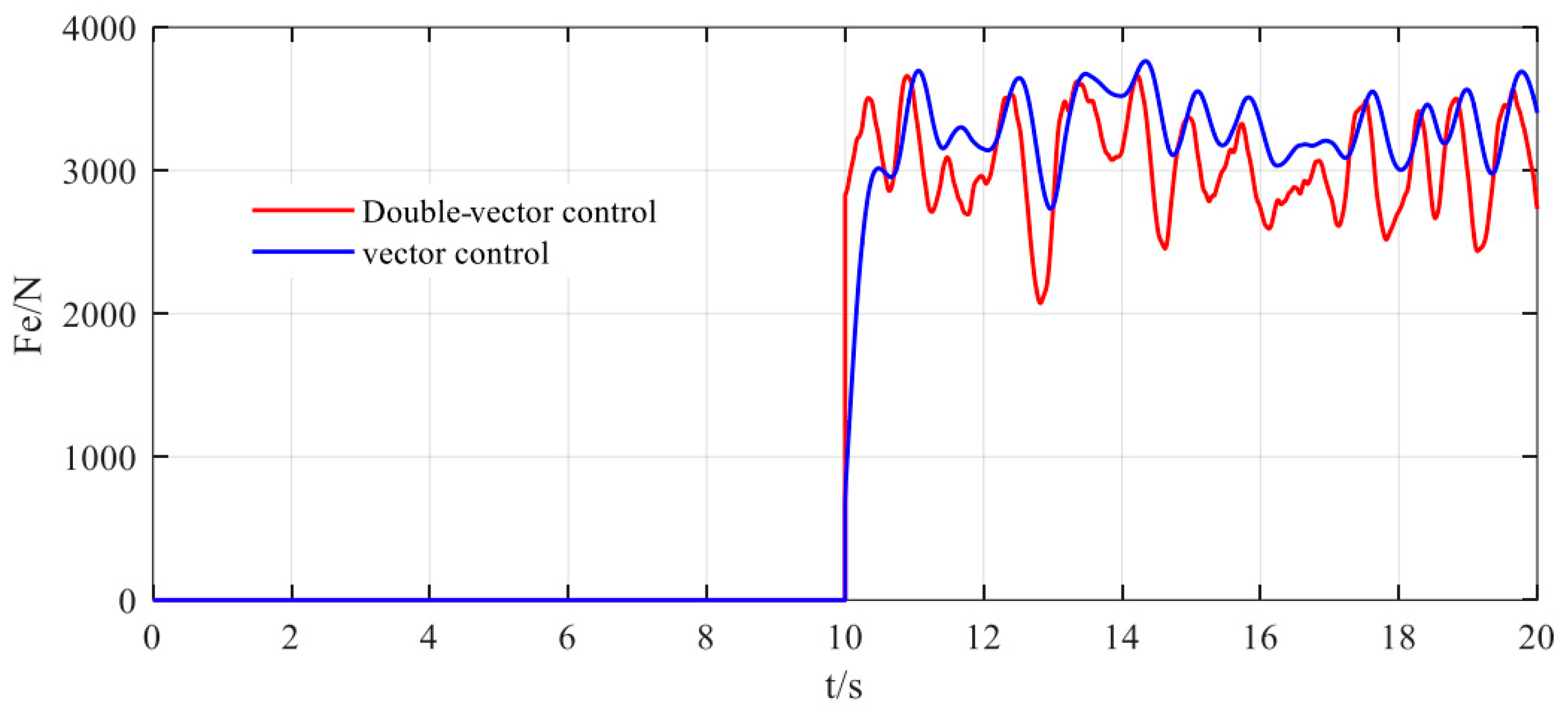
As can be seen from
Figure 16 and
Figure 17, the vehicle acceleration and the amplitude of the electromagnetic thrust response curves are still somewhat reduced. Therefore, even if the level of the road increases and the road becomes more rugged, the double-vector control can still achieve a better control effect. In order to facilitate understanding, an optimization performance comparison of vector control and double-vector control is made in
Table 8.
Combined with Simulation Conditions 1, 2, and 3, it can be seen that under different road excitation conditions and vehicle speeds, the control algorithm still has a good fluctuation reduction ability and response speed.
6. Conclusions and Discussion
A new control strategy for permanent magnet synchronous linear motor is proposed. The structural components of the motor are designed as a flat rectangular slot structure. For the motor control part, finite-set model predictive control (MPC) is used and corrected by double-vector control. On this basis, a multi-layer layered vehicle height controller is designed to optimize vehicle performance under complex road conditions. The simulation results show that the control strategy can effectively reduce the vibration amplitude of the vehicle, improve the response speed, reduce the thrust required to reach the target height, and achieve an energy saving effect. These findings have important contributions to future vehicle design and optimization, especially in terms of improving vehicle stability at different speeds and road conditions, as well as providing a theoretical basis for energy saving.
As shown in
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13,
Figure 14,
Figure 15,
Figure 16 and
Figure 17, the dual-vector control strategy significantly reduces sprung mass displacement fluctuations and improves dynamic response compared to conventional methods. This enhancement minimizes vertical vibration transmission, enhancing ride comfort on uneven road surfaces. Furthermore, effective suppression of peak body acceleration helps prevent unintended activations of electronic stability control (ESC) during emergency maneuvers, thereby improving handling safety. However, the dual-vector approach requires dual-voltage-vector optimizations per control cycle, resulting in substantially higher computational complexity than single-vector strategies. To achieve real-time control in high-dynamic scenarios, high-performance processors or dedicated hardware acceleration is necessary, imposing greater demands on onboard computational resources.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}