
Rectifier Fault Diagnosis Using LTSA Optimization High-Dimensional Energy Entropy Feature


Abstract
1. Introduction
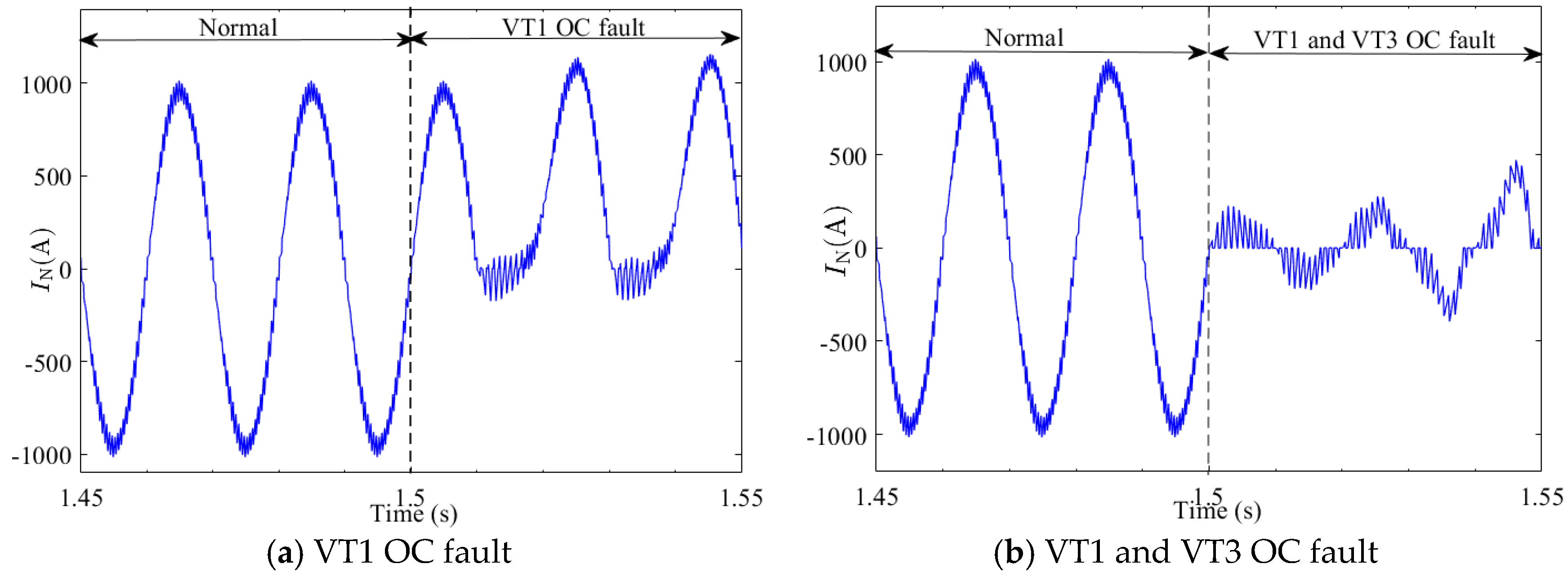
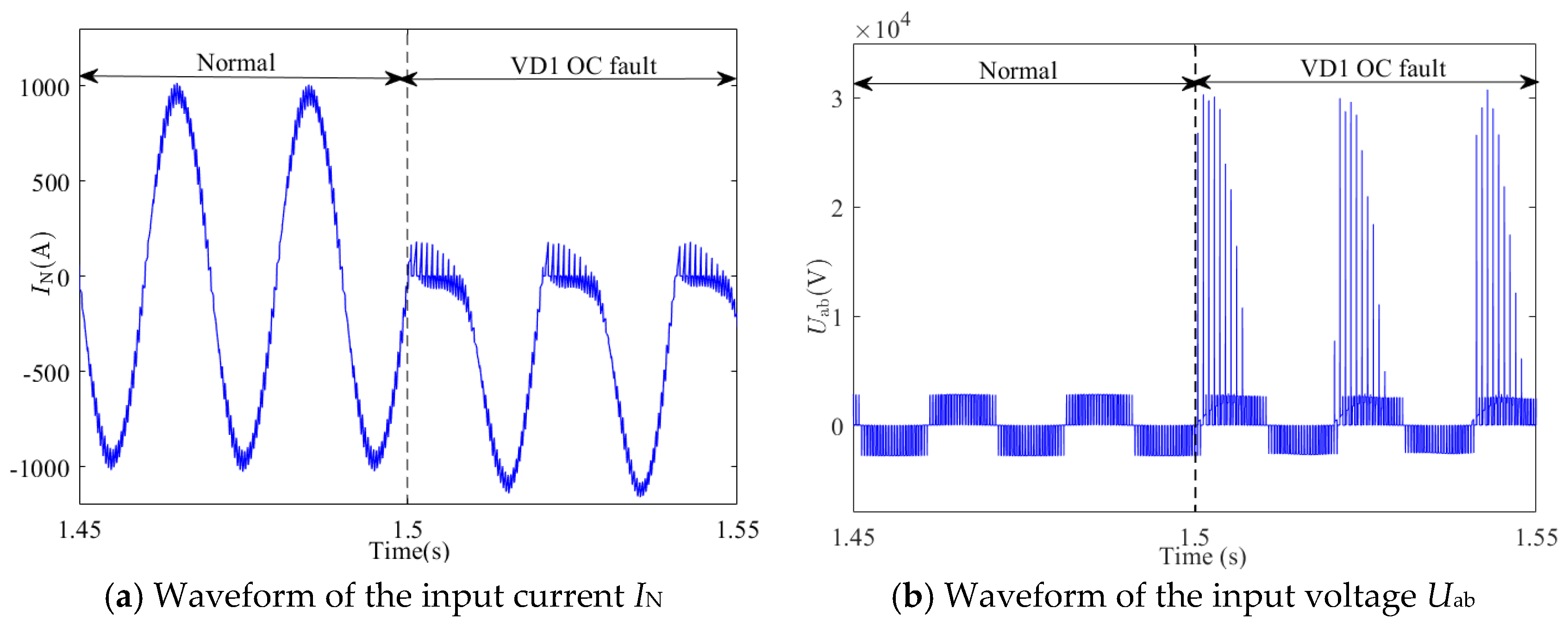
2. System Description and Fault Analysis
3. High-Dimensional Feature Extraction and Dimensionality Reduction Optimization
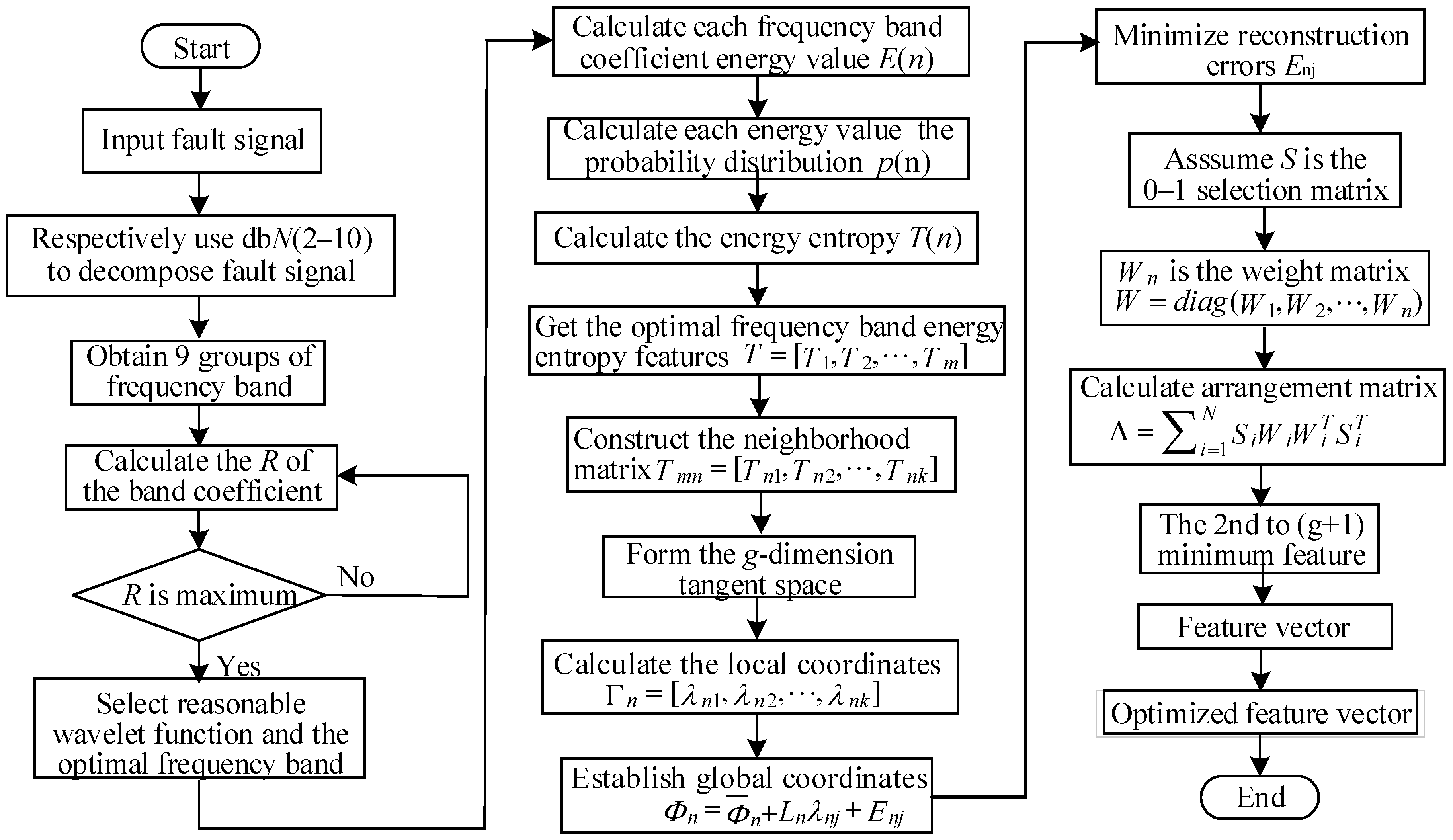
3.1. Feature Extraction Based on LTSA and Energy Entropy Algorithm
3.2. Optimal Low-Dimensional Feature Selection Based on DB Index
3.3. Fault Diagnosis Method
4. Fault Diagnosis Results and Analysis
4.1. Optimal Wavelet Function Selection
4.2. Extraction and Data Analysis of High-Dimensional Energy Entropy Feature
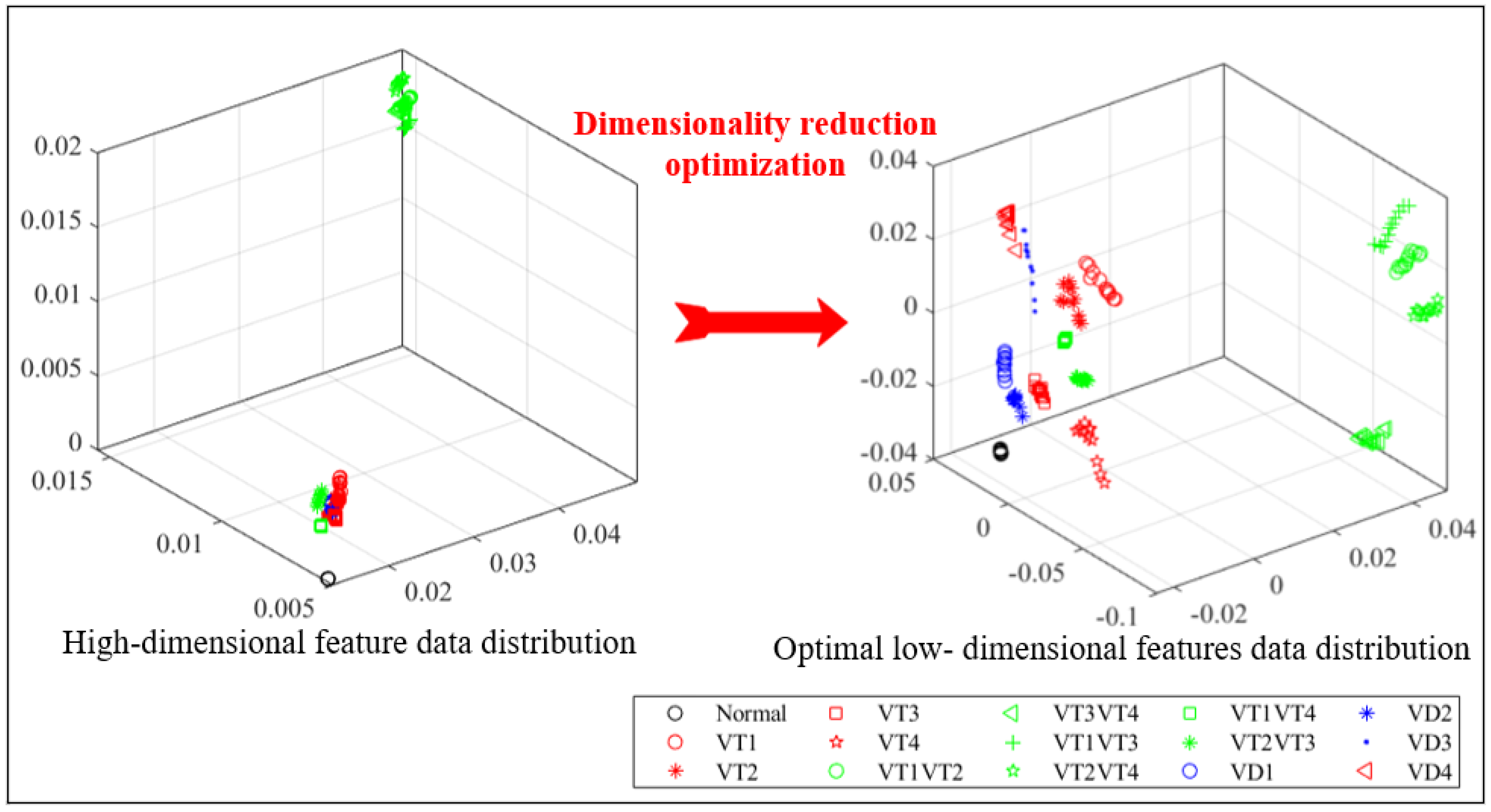
4.3. Dimensionality Reduction Optimization and Effect Analysis of High-Dimensional Feature
4.4. Analysis of Diagnostic Results
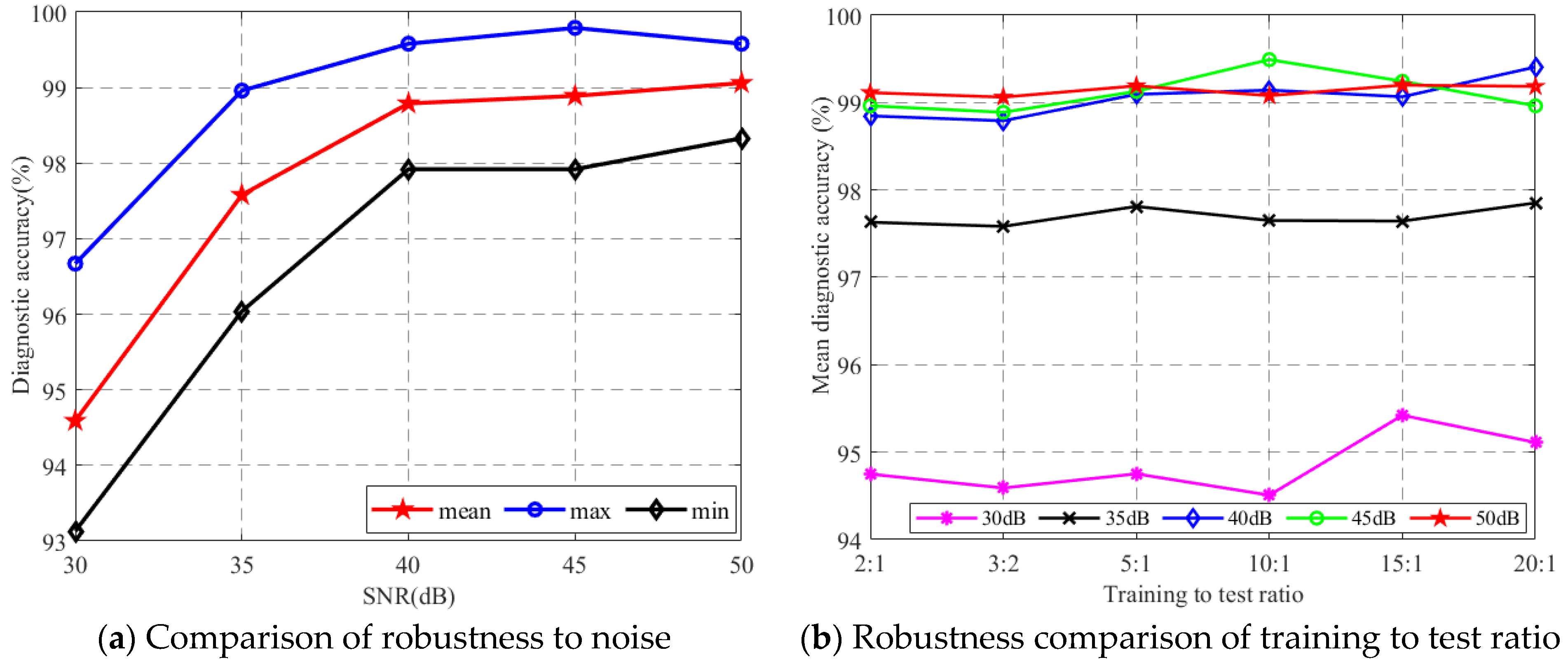
4.5. Robustness Verification and Analysis
4.6. Decomposition Levels Analysis
4.7. Algorithm Complexity Comparison
4.8. Comparison with Advanced Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, X.; Xu, J.; Chen, Z.; Xu, S.; Liu, K. Real-time fault diagnosis of pulse rectifier in traction system based on structural model. IEEE Trans. Intell. Transp. Syst. 2020, 23, 2130–2143. [Google Scholar] [CrossRef]
- Liang, J.; Mao, X. Rectifier Fault Diagnosis Based on Euclidean Norm Fusion Multi-Frequency Bands and Multi-Scale Permutation Entropy. Electronics 2025, 14, 612. [Google Scholar] [CrossRef]
- Xie, D.; Ge, X. A state estimator-based approach for open-circuit fault diagnosis in single-phase cascaded H-bridge rectifiers. IEEE Trans. Ind. Appl. 2018, 55, 1608–1618. [Google Scholar] [CrossRef]
- Hu, K.; Liu, Z.; Iannuzzo, F.; Blaabjerg, F. Simple and effective open switch fault diagnosis of single-phase PWM rectifier. Microelectron. Reliab. 2018, 88, 423–427. [Google Scholar]
- Mahtani, K.; Guerrero, J.M.; Beites, L.F.; Platero, C.A. Application of a Model-Based Method to the Online Detection of Rotating Rectifier Faults in Brushless Synchronous Machines. Machines 2023, 11, 223. [Google Scholar] [CrossRef]
- Arehpanahi, M.; Entekhabi, A.M. A New Technique for Online Open Switch Fault Detection and Location in Single-phase Pulse Width Modulation Rectifier. Int. J. Eng. 2022, 35, 1759–1764. [Google Scholar] [CrossRef]
- Chen, M.; He, Y. Open-circuit fault diagnosis in NPC rectifiers using reference voltage deviation and incorporating fault-tolerant control. IEEE Trans. Power Electron. 2023, 39, 1514–1526. [Google Scholar]
- Xia, X.; Ning, P. Fault Diagnosis of Frequency Control System Based on FFT. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar]
- Yuan, Z.; He, Y.; Yuan, L.; Chen, P.; Cheng, Z. An efficient feature extraction approach based on manifold learning for analogue circuits fault diagnosis. Analog. Integr. Circuits Signal Process. 2020, 102, 237–252. [Google Scholar]
- Sun, X.; Song, C.; Zhang, Y.; Sha, X.; Diao, N. An open-circuit fault diagnosis algorithm based on signal normalization preprocessing for motor drive inverter. IEEE Trans. Instrum. Meas. 2023, 72, 3513712. [Google Scholar]
- Kouadri, A.; Hajji, M.; Harkat, M.F.; Abodayeh, K.; Mansouri, M.; Nounou, H.; Nounou, M. Hidden Markov model based principal component analysis for intelligent fault diagnosis of wind energy converter systems. Renew. Energy 2020, 150, 598–606. [Google Scholar]
- Fezai, R.; Dhibi, K.; Mansouri, M.; Trabelsi, M.; Hajji, M.; Bouzrara, K.; Nounou, H.; Nounou, M. Effective random forest-based fault detection and diagnosis for wind energy conversion systems. IEEE Sens. J. 2020, 21, 6914–6921. [Google Scholar]
- Yahyaoui, Z.; Hajji, M.; Mansouri, M.; Abodayeh, K.; Bouzrara, K.; Nounou, H. Effective Fault Detection and Diagnosis for Power Converters in Wind Turbine Systems Using KPCA-Based BiLSTM. Energies 2022, 15, 6127. [Google Scholar] [CrossRef]
- Li, X.; Jia, R.; Zhang, R.; Yang, S.; Chen, G. A KPCA-BRANN based data-driven approach to model corrosion degradation of subsea oil pipelines. Reliab. Eng. Syst. Saf. 2022, 219, 108231. [Google Scholar]
- Zhang, N.; Xu, Y.; Zhu, Q.X.; He, Y.L. Improved multi-distance ARMF integrated with LTSA based pattern matching method and its application in fault diagnosis. IEEE Trans. Autom. Sci. Eng. 2023, 21, 3461–3471. [Google Scholar]
- Mao, X.; Dong, H. Feature Fusion Based on Locally Linear Embedding in Fault Diagnosis of A Single-Phase PWM Rectifier. In Proceedings of the 2023 7th International Conference on Smart Grid and Smart Cities (ICSGSC), Lanzhou, China, 22–24 September 2023; pp. 94–100. [Google Scholar]
- Gonzalez-Jimenez, D.; Del-Olmo, J.; Poza, J.; Garramiola, F.; Madina, P. Data-driven fault diagnosis for electric drives: A review. Sensors 2021, 21, 4024. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, K.; Al-Durra, A.; Zhou, D. A novel fault diagnostic method in power converters for wind power generation system. Appl. Energy 2020, 266, 114851. [Google Scholar]
- Liang, J.; Zhang, K.; Al-Durra, A.; Zhou, D. A multi-information fusion algorithm to fault diagnosis of power converter in wind power generation systems. IEEE Trans. Ind. Inform. 2023, 20, 1167–1179. [Google Scholar] [CrossRef]
- Liang, Y.; Zhang, J.; Shi, Z.; Zhao, H.; Wang, Y.; Xing, Y.; Zhang, X.; Wang, Y.; Zhu, H. A Fault Identification Method of Hybrid HVDC System Based on Wavelet Packet Energy Spectrum and CNN. Electronics 2024, 13, 2788. [Google Scholar] [CrossRef]
- Lu, N.; Zhang, G.; Xiao, Z.; Malik, O.P. Feature extraction based on adaptive multiwavelets and LTSA for rotating machinery fault diagnosis. Shock Vib. 2019, 2019, 1201084. [Google Scholar]
- Ros, F.; Riad, R.; Guillaume, S. PDBI: A partitioning Davies-Bouldin index for clustering evaluation. Neurocomputing 2023, 528, 178–199. [Google Scholar]
- Zhong, X.; Shih, F.Y. Automatic Image Pixel Clustering based on Mussels Wandering Optimization. Int. J. Pattern Recognit. Artif. Intell. 2021, 35, 2154005. [Google Scholar]
- Kuai, Z.; Huang, G. Fault diagnosis of diesel engine valve clearance based on wavelet packet decomposition and neural networks. Electronics 2023, 12, 353. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, K. A robust fault diagnosis scheme for converter in wind turbine systems. Electronics 2023, 12, 1597. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, K. A new hybrid fault diagnosis method for wind energy converters. Electronics 2023, 12, 1263. [Google Scholar] [CrossRef]
- Du, B.; He, Y.; Zhang, Y. Open-circuit fault diagnosis of three-phase PWM rectifier using beetle antennae search algorithm optimized deep belief network. Electronics 2020, 9, 1570. [Google Scholar] [CrossRef]
- Kou, L.; Liu, C.; Cai, G.W.; Zhou, J.N.; Yuan, Q.D. Data-driven design of fault diagnosis for three-phase PWM rectifier using random forests technique with transient synthetic features. IET Power Electron. 2020, 13, 3571–3579. [Google Scholar]
- Liu, J.; Wang, J.; Yu, W.; Wang, Z.; Zhong, G.A. Open-circuit fault diagnosis of traction inverter based on improved convolutional neural network. Journal of Physics: Conference Series. IOP Publ. 2020, 1633, 012099. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Mode | Label | Type | Mode | Label |
|---|---|---|---|---|---|
| Normal | Normal | 1 | Two IGBTs on the same half bridge | VT1VT3 | 8 |
| Single IGBT | VT1 | 2 | VT2VT4 | 9 | |
| VT2 | 3 | Two IGBTs on different half bridges | VT1VT4 | 10 | |
| VT3 | 4 | VT2VT3 | 11 | ||
| VT4 | 5 | Single-power diode | VD1 | 12 | |
| Two IGBTs on the same bridge arm | VT1VT2 | 6 | VD2 | 13 | |
| VT3VT4 | 7 | VD3 | 14 | ||
| --- | --- | --- | VD4 | 15 |
| Parameter | Name | Value | Unit |
|---|---|---|---|
| UN | Traction transformer secondary voltage | 1450 | V |
| LN | Traction transformer leakage inductance | 2.3 | mH |
| Udc | Traction rectifier output voltage | 2800 | V |
| Cd | Middle supporting capacitor | 8 | mF |
| Fault Mode | dbN | Fault Mode | dbN | Fault Mode | dbN |
|---|---|---|---|---|---|
| Normal | db5 | VT1VT2 | db6 | VT2VT3 | db3 |
| VT1 | db9 | VT3VT4 | db10 | VD1 | db2 |
| VT2 | db6 | VT1VT3 | db10 | VD2 | db2 |
| VT3 | db6 | VT2VT4 | db6 | VD3 | db2 |
| VT4 | db9 | VT1VT4 | db2 | VD4 | db2 |
| Fault Mode | Average Accuracy | Fault Mode | Average Accuracy | Fault Mode | Average Accuracy |
|---|---|---|---|---|---|
| Normal | 100% | VT1VT2 | 100% | VT2VT3 | 100% |
| VT1 | 100% | VT3VT4 | 100% | VD1 | 96.25% |
| VT2 | 99.7917% | VT1VT3 | 100% | VD2 | 98.026% |
| VT3 | 100% | VT2VT4 | 100% | VD3 | 95.1% |
| VT4 | 100% | VT1VT4 | 100% | VD4 | 96.77% |
| Decomposition Layers | SNR (dB) | Mean (%) | Max (%) | Min (%) |
|---|---|---|---|---|
| 4-layer | 40 | 95.7778 | 97.5 | 94.375 |
| 45 | 95.6875 | 97.5 | 93.9583 | |
| 50 | 95.944 | 97.5 | 94.583 | |
| 5-layer | 40 | 98.7917 | 99.5833 | 97.9167 |
| 45 | 98.8889 | 99.7917 | 97.9167 | |
| 50 | 99.0625 | 99.5833 | 98.3333 | |
| 6-layer | 40 | 98.9167 | 99.3750 | 97.7083 |
| 45 | 98.7708 | 99.5833 | 97.50 | |
| 50 | 98.9584 | 99.7917 | 98.125 |
| Algorithm | Dimensionality Reduction Time (s) | Training Time (s)/ Diagnosis Time (s) | Computation Burden (Parameter) | Accuracy (%) |
|---|---|---|---|---|
| Energy entropy feature | --- | 83.6324/0.0209 | --- | 55.3681 |
| PCA | 0.0165 | 53.8707/0.034 | Target dimensionality | 57.5000 |
| KPCA | 0.6511 | 53.9517/0.0152 | Target dimension, kernel function | 52.7083 |
| ISOMAP | 126.7947 | 54.2798/0.0148 | Target dimension, neighborhood points | 53.1250 |
| LTSA | 124.4325 | 55.0171/0.0066 | Target dimension, neighborhood points | 99.0625 |
| Methods | Condition Change | Reliability | Training-Sample-to-Test-Sample Ratio | Noise Level | Accuracy |
|---|---|---|---|---|---|
| WPD-LTSA-SVM | Output current | Average run of 30 times | 3:2 | 30 dB | 94.5903% |
| PCA-HMM [11] | Not mentioned | Not mentioned | 1:1 | Data with noise | 93.61% |
| MEMD-FE-AFSA-SVM [26] | Wind speed | Average run of 30 times | 3:2 | 30 dB | 95.5758% |
| Optimized-DBN [27] | Output current | Average run of 200 times | 4:1 | No noise | 98.43% |
| RF [28] | Input current | Not mentioned | 2:1 | No noise | 98.32% |
| WDD-CNN [29] | Load torque | Not mentioned | 4:1 | No noise | 99.47% |
| Data with noise | 96.65% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, X.; Dong, H.; Liang, J. Rectifier Fault Diagnosis Using LTSA Optimization High-Dimensional Energy Entropy Feature. Electronics 2025, 14, 1405. https://doi.org/10.3390/electronics14071405
Mao X, Dong H, Liang J. Rectifier Fault Diagnosis Using LTSA Optimization High-Dimensional Energy Entropy Feature. Electronics. 2025; 14(7):1405. https://doi.org/10.3390/electronics14071405
Chicago/Turabian StyleMao, Xiangde, Haiying Dong, and Jinping Liang. 2025. "Rectifier Fault Diagnosis Using LTSA Optimization High-Dimensional Energy Entropy Feature" Electronics 14, no. 7: 1405. https://doi.org/10.3390/electronics14071405
APA StyleMao, X., Dong, H., & Liang, J. (2025). Rectifier Fault Diagnosis Using LTSA Optimization High-Dimensional Energy Entropy Feature. Electronics, 14(7), 1405. https://doi.org/10.3390/electronics14071405