1. Introduction
As the “dual high” characteristics of power systems become more prominent, the insufficient support inertia from traditional units affects the stable operation of the grid. Due to the uneven distribution of renewable resources and economic development, the grid in China exhibits an imbalance between power sources and load distribution. In load centers, the integration of DC and renewable energy sources has resulted in a reduction in conventional power generation units, which in turn causes insufficient dynamic reactive power, resulting in voltage stability issues [
1]. In August 2022, Sichuan experienced rare high temperatures and low precipitation, causing its hydropower units to produce much less power than in previous years. At the same time, the high temperatures led to a surge in the use of household appliances such as air conditioners, which greatly increased the demand for electricity. This put considerable strain on the load center, directly leading to planned power outages in some areas to ensure grid stability and significantly affecting residents’ daily lives. To address the issues of inadequate reactive power support and the risks of voltage instability, common solutions include increasing conventional power plants or installing reactive power compensation devices. However, building new power plants involves high costs, long construction periods, and environmental concerns. Therefore, adding reactive power compensation devices is a more flexible and economical solution. Reference [
2] discusses the transient voltage stability issues in the load center of the Hunan grid, where reactive power compensation devices were configured in specific areas based on engineering experience. The transient voltage stabilization effects of these devices were verified through simulations.
At present, apart from synchronous generators, reactive power compensation devices used to enhance system transient stability include static var compensators (SVCs), static var generators (SVGs), static synchronous compensators (STATCOMs), and synchronous condensers, among others. Compared to other devices, an SC, as rotating equipment, not only provides inertia support and short-circuit capacity for the system but also enables rapid reactive power adjustment. Its adjustment capability is minimally influenced by voltage, and it offers strong instantaneous reactive power support and short-term overload capacity, providing over twice its rated capacity during the transient process. Thus, an SC has advantages in instantaneous reactive power compensation and transient voltage support [
3,
4]. The distribution of conventional power sources and loads is uneven; while power sources supply reactive power support to the system, loads consume it. Therefore, strategically selecting SC locations can optimize the reactive power balance and enhance transient voltage stability. However, due to the high investment, construction, and maintenance costs of an SC, along with the challenges of relocation once installed, an effective SC configuration becomes crucial [
3,
5].
The traditional SC configuration method mainly relies on steady-state power flow analysis to assess system strength by using indicators such as the short-circuit ratio as guidance. Reference [
6] explores configuring SCs under the constraint of the short-circuit ratio to increase the output limits of renewable energy stations, thus enhancing renewable energy absorption capacity. However, it does not account for economic factors or their effects on transient voltage stability improvement. Reference [
7] established a short-circuit ratio index for scenarios involving multiple renewable energy stations. Based on this index, the configuration of distributed and centralized SC is optimized. In addition to the short-circuit ratio index, some studies also establish a node inertia index to assess system frequency stability. In areas with weak node inertia, SCs are deployed until the inertia at all nodes meets the requirements [
8]. Furthermore, several studies have developed composite indices to optimize the configuration of SCs. Reference [
5] proposes a weighted percentage index that considers both wind farm capacity and electrical distance. SCs are then placed at nodes with low index values until voltage requirements are satisfied. Reference [
9] focuses on economic optimization, considering static voltage security constraints, DC voltage, and reactive power constraints to improve system safety. However, it has not been validated in real-grid applications. Reference [
10] optimizes the configuration by maximizing the net present value (NPV) of a wind farm’s output, with the short-circuit ratio at the integration point as a constraint, balancing technical and economic factors.
The large-scale integration of power electronic devices and new energy stations into the grid has significantly increased the complexity of the system’s transient and sub-transient characteristics. However, traditional steady-state power flow configuration methods do not fully account for the transient characteristics. Therefore, the placement of SCs should take both voltage stability and dynamic reactive power compensation needs into account to ensure effective transient support. Reference [
2] introduces a method based on engineering experience, configuring distributed and centralized synchronous condensers in key areas, respectively. Time-domain simulations are then conducted to observe voltage post-installation trajectories. By comparing voltage characteristics under both schemes, the optimal configuration for local grids is determined. However, this approach is constrained by its reliance on local engineering practices, limiting its broader applicability. The general approach to configuring SCs considering transient processes begins with defining indicators to preliminarily select the siting of the condensers. Next, an optimization model is established with objectives such as minimizing costs while ensuring the transient voltage meets the constraints. Finally, time-domain simulation results are used to solve the optimization model and validate the configuration [
11,
12]. Reference [
13] introduces a node-phase sensitivity index to evaluate phase changes at potential installation nodes under fault conditions. By calculating the critical sensitivity based on the system’s power angle characteristics, the range for potential siting locations is determined. However, this approach does not provide a strategy for determining the required capacity of the SC.
Existing research on SC configurations primarily focus on minimizing configuration and operational costs. Apart from this, some studies incorporate factors, such as emergency control costs after faults [
3], transient voltage violation indicators [
14], the suppression of commutation failure effects [
15], multi-infeed factor indicators [
16], and transmission line power [
12], into the objective function. Researchers commonly combine time-domain simulations with dynamic indicator assessments to solve the optimization model. This approach configures SCs at weak nodes in a hierarchical manner and employs iterative simulations until the required stability criteria are met [
16].
To improve solution efficiency, research has increasingly focused on heuristic and intelligent optimization algorithms. These algorithms are capable of efficiently exploring large-scale search spaces to approximate optimal solutions. Heuristic algorithms such as the genetic algorithm (GA) [
10], particle swarm optimization (PSO) [
11], and the bat algorithm (BA) [
14] conduct global searches by simulating physical or biological processes in nature. For instance, ref. [
11] uses PSO to solve an SC configuration model based on the IEEE39 system, and the configuration balances cost and transient voltage constraints; however, it has not been validated in large-scale grids. Additionally, other studies have employed algorithms such as the stag beetle algorithm [
12], improved gravitational search algorithm [
15], and mixed-integer convex optimization method [
17] to solve optimization models.
Table 1 summarizes the efficiency, computation time, and practicality of various algorithms. The data indicate that the methods above can solve models containing multiple objectives and complex constraints; however, they involve numerous time-domain simulations. Due to massive simulation times and high computational resources required when applied in practical large-scale grid applications, these methods face challenges in engineering practices. Reference [
18] adopts a control vector parameterization method for solving dynamic reactive power siting and sizing, improving the solution efficiency through trajectory sensitivity analysis, singular value decomposition (SVD), and linear programming techniques.
Although previous research has employed time-domain simulations for SC configuration, the algorithms used often introduce excessive simulation iterations. These excessive iterations strain computational resources, thereby making the methods unsuitable for real-grid applications. To address these challenges, this study introduces a reactive power–voltage sensitivity parameter, which not only serves as a basis for SC siting but also drives the optimization process driven by EMT simulation results. This method exhibits good convergence, satisfies transient voltage stability constraints, ensures cost-effectiveness, and significantly reduces the number of iterations, making it suitable for practical engineering applications.
The structure of this paper is as follows:
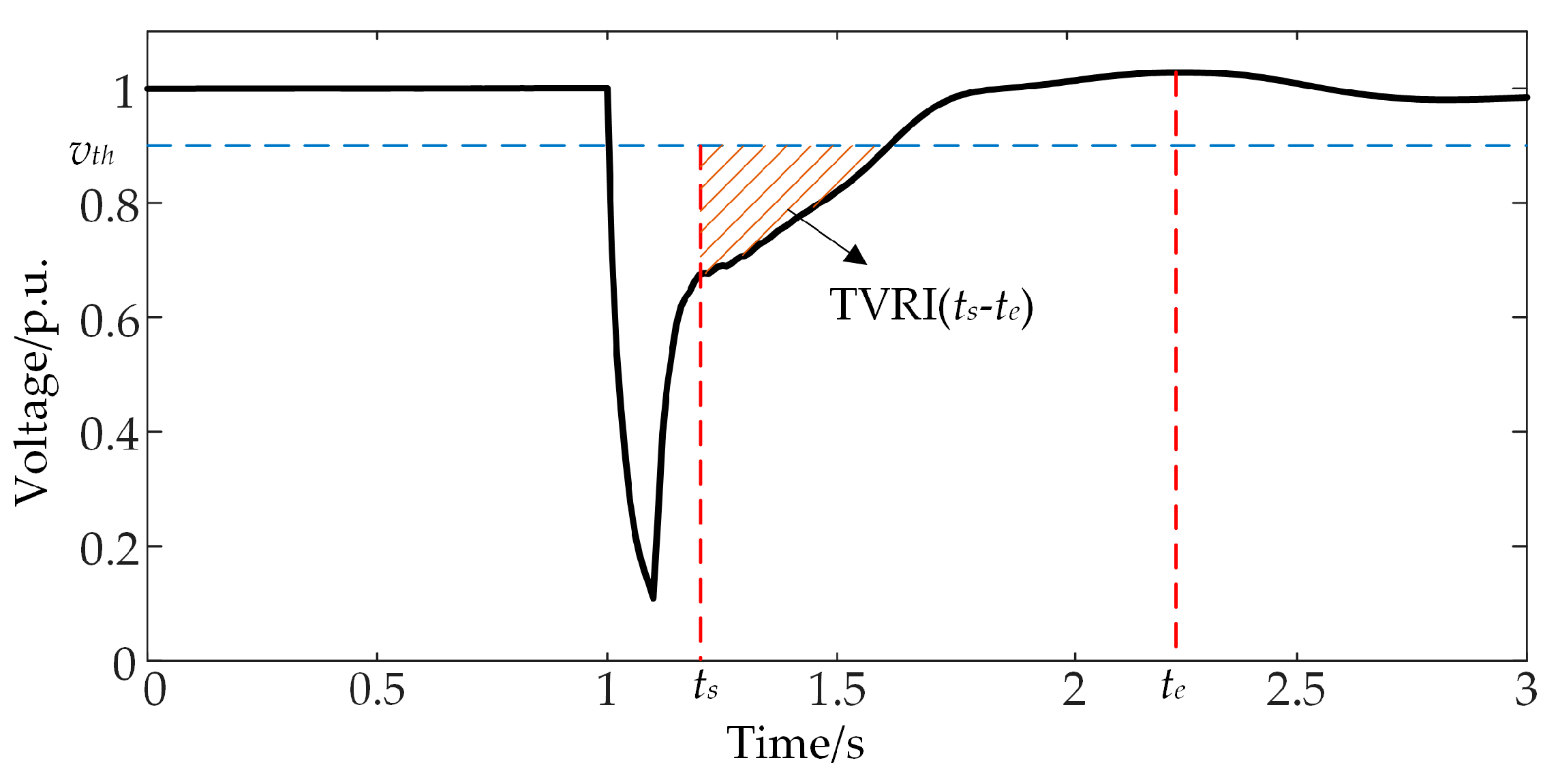
Section 2 introduces relevant indexes for evaluating transient voltage stability.
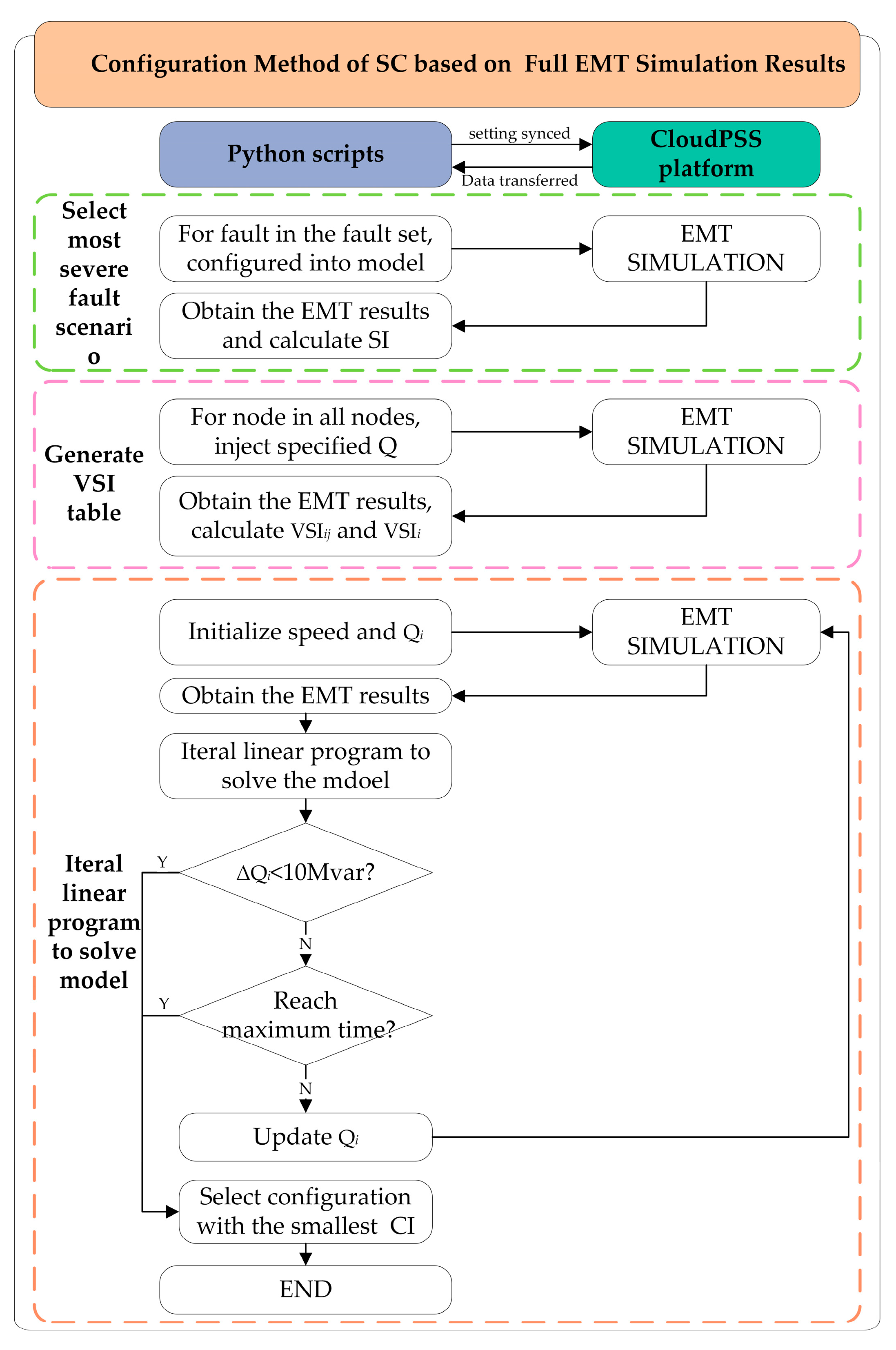
Section 3 presents the optimization model for the SC configuration and solution.
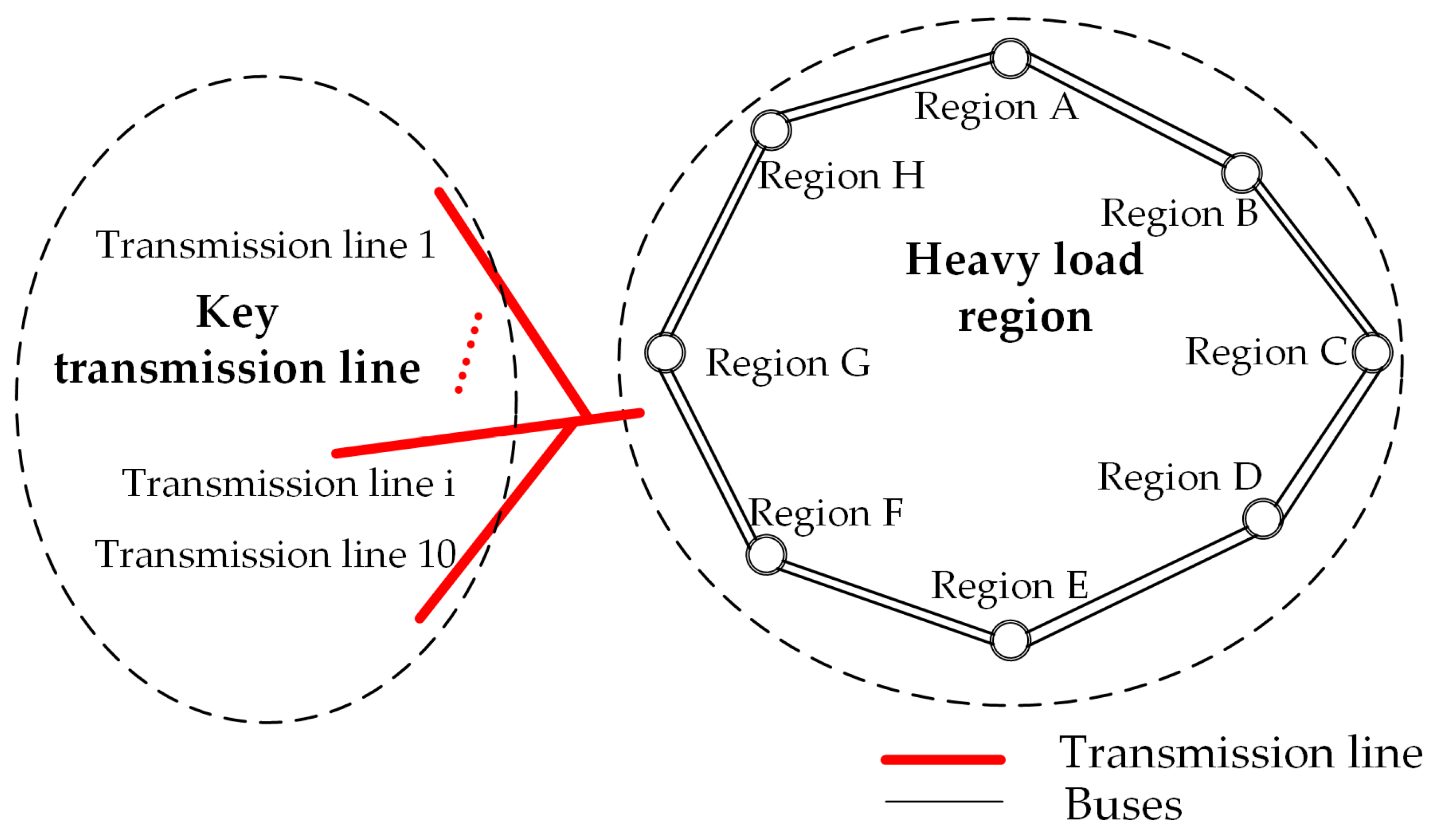
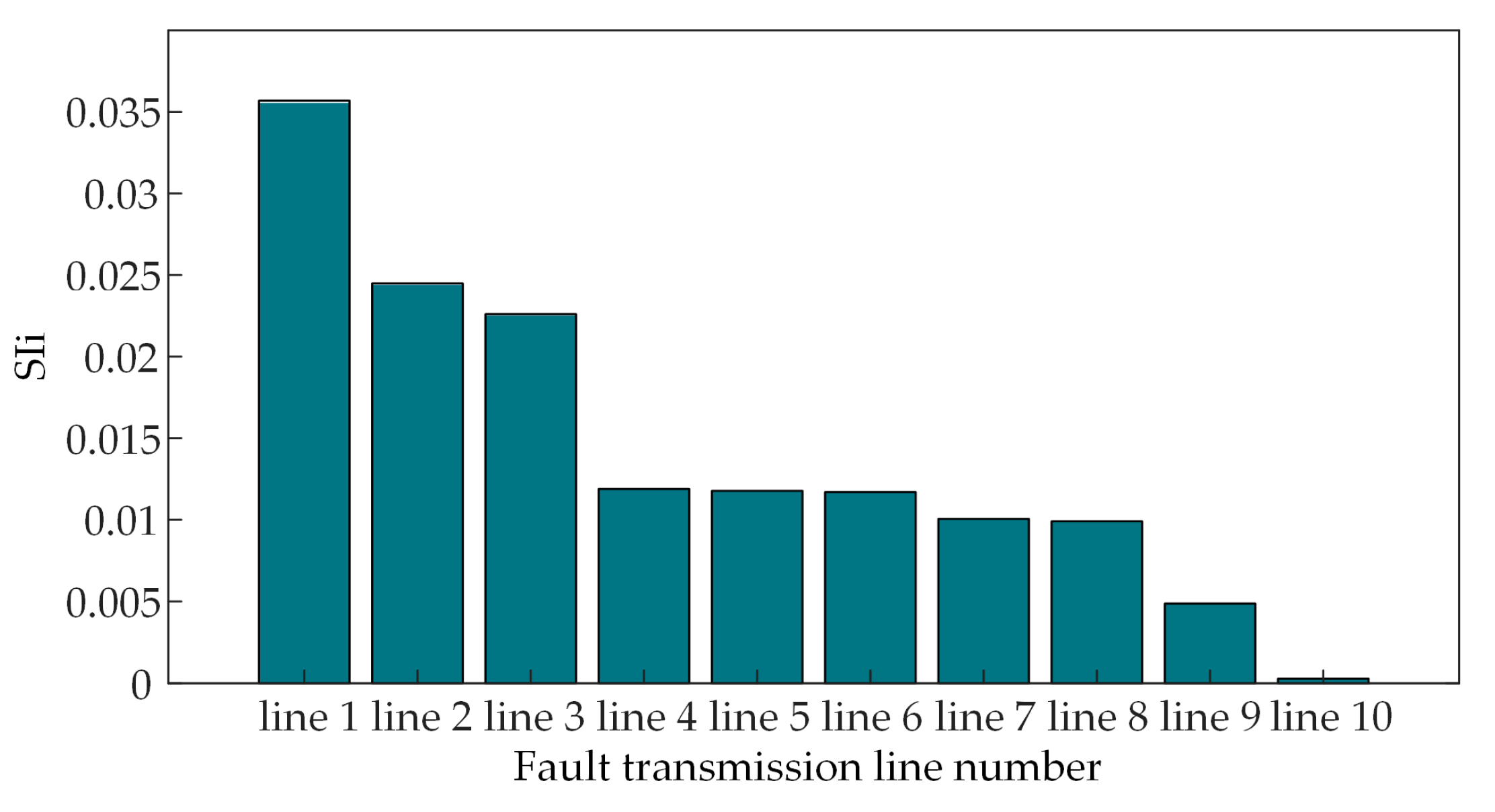
Section 4 describes the case study, and
Section 5 concludes this paper.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}