
An Effective Path Planning Method Based on VDWF-MOIA for Multi-Robot Patrolling in Expo Parks


Abstract
1. Introduction
- A multi-objective multi-robot patrolling problem for the expo park is proposed. This problem combines the multiple traveling salesman problem (MTSP) and obstacle avoidance, simultaneously optimizing multi-robot task allocation and path planning. The objectives include minimizing the total patrol path length and achieving balanced task distribution among robots.
- A path cost matrix method based on vector rotation-angle obstacle avoidance (PCM-VRAOA) is introduced. Before path optimization, this method calculates all feasible paths between patrol points and stores the path length and detour information. By establishing a global path cost matrix in the early stage of path planning, this method provides more reasonable obstacle avoidance paths and ensures better integration between path planning and task allocation, improving patrol path quality.
- A new multi-objective immune optimization algorithm, VDWF-MOIA, is proposed. This algorithm is designed to enhance global search ability and path optimization in complex multi-robot patrolling problems. It adopts a dual-antibody encoding scheme to represent patrol paths and introduces a crossover operator inspired by the Van der Waals force mechanism. This operator improves solution diversity and convergence speed, effectively establishing a collaborative optimization mechanism between task allocation and path planning.
2. Related Work
2.1. Multi-Robot Path Planning Problem
2.2. Multi-Objective Optimization Algorithm
3. Multi-Robot Patrolling Problem
3.1. Problem Statement
3.2. Mathematical Model
3.3. Problem Complexity
4. Multi-Objective Immune Algorithm with Van Der Waals Force Mechanism
4.1. Antibody Encoding
4.2. Affinity Calculation and Pareto-Optimal Solutions
4.3. Path Cost Matrix Based on Vector Rotation-Angle-Based Obstacle Avoidance
- (1)
- Vector Polar Angle Calculation: For each obstacle vertex , the algorithm calculates the rotation angle relative to the robot’s current position , using Formula (10):This formula computes the angle between the horizontal axis and the line connecting the robot to the vertex. These angles form an ordered sequence to identify critical detour nodes.
- (2)
- Bidirectional Search Strategy: The algorithm simultaneously explores two paths—one following maximum-angle vertices (clockwise) and another tracking minimum-angle vertices (counter-clockwise). This dual-path approach ensures comprehensive obstacle boundary coverage, as illustrated in Figure 5.
- (3)
- Path Cost Evaluation: The total length L of each candidate path is computed as shown in Formula (11):Here, is the distance from the robot’s start position to the first detour node , represents the distance between consecutive detour nodes, and is the distance from the last detour node to the goal .
- (4)
- Dynamic Path Selection: The shortest valid path is chosen based on Formula (12):where and are the lengths of the maximum-angle and minimum-angle paths, respectively. This ensures efficient navigation through complex environments.
4.4. Van Der Waals Force Mechanism
4.4.1. The Definition of Van Der Waals Force
4.4.2. Theoretical Basis and Formal Proof
- Similarity Measure: Cosine similarity measures the directional consistency between gene fragments. A value closer to 1 indicates higher similarity, while a value closer to −1 indicates lower similarity.
- Distance Measure: The inverse-square relationship of Euclidean distance ensures strong attraction for closely located fragments while avoiding excessive influence from distant fragments.
- Convergence Analysis: Using a Markov chain model, we prove that the Van der Waals force mechanism ensures the algorithm converges to the global optimal solution within a finite number of iterations. Specifically, the optimization process can be modeled as a Markov chain, where each state represents the current solution, and state transitions are driven by the crossover operations of the Van der Waals force mechanism. The transition probability is proportional to , i.e.,. The monotonicity of transition probabilities ensures that the algorithm gradually approaches better solutions while maintaining solution diversity through intelligent matching of similar fragments, avoiding local optima.
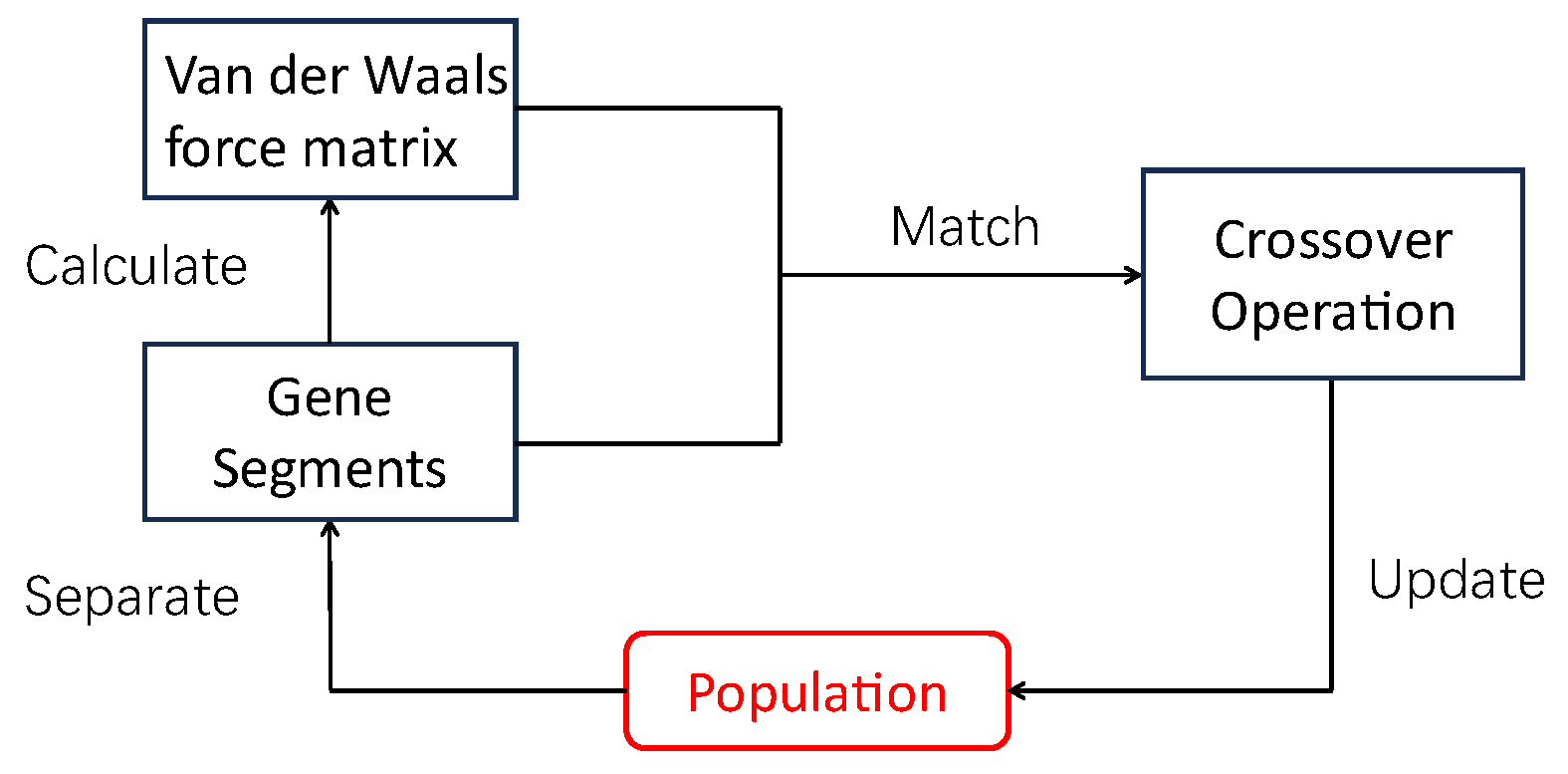
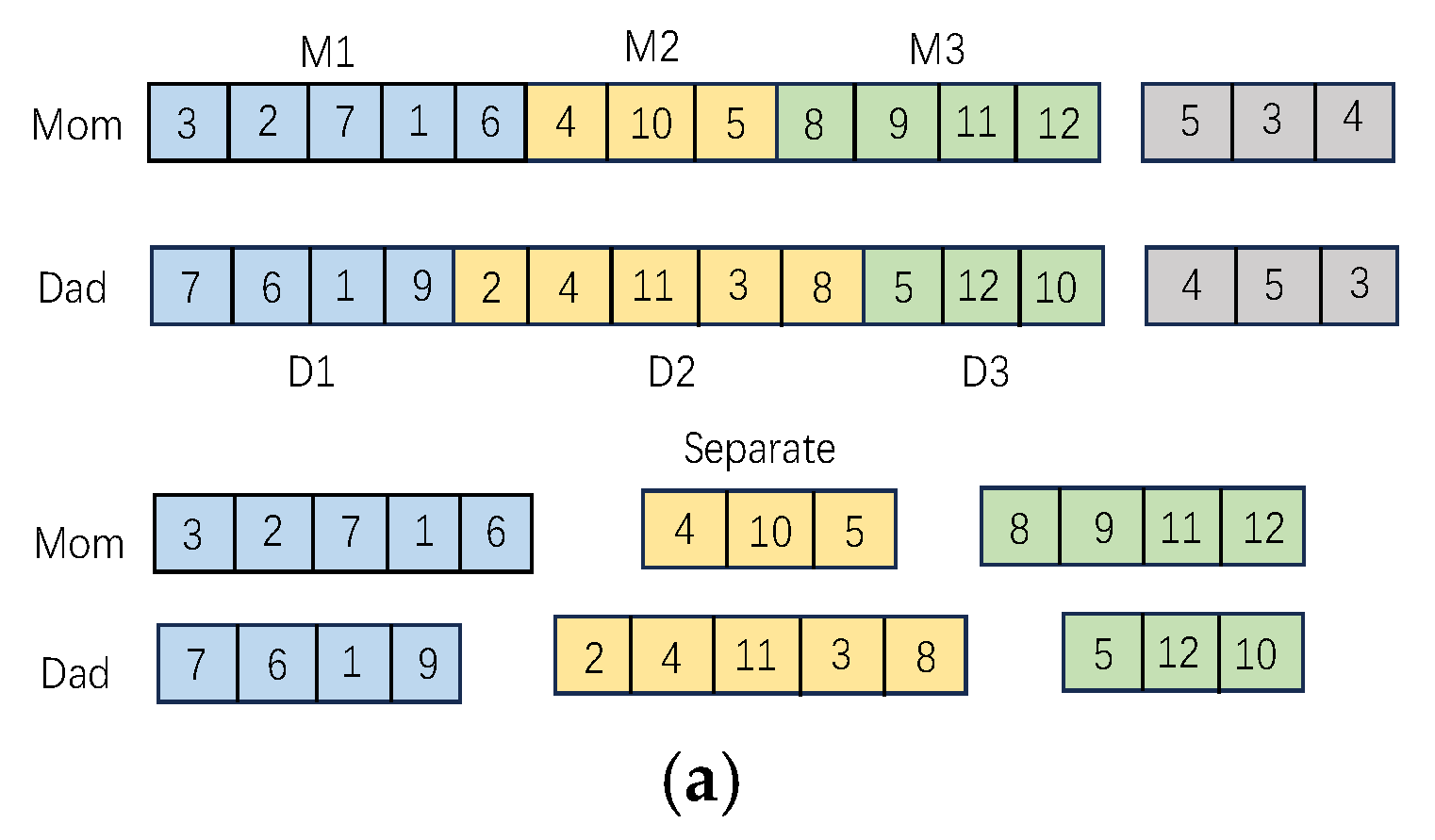
4.4.3. Gene Fragments Separating and Matching Process
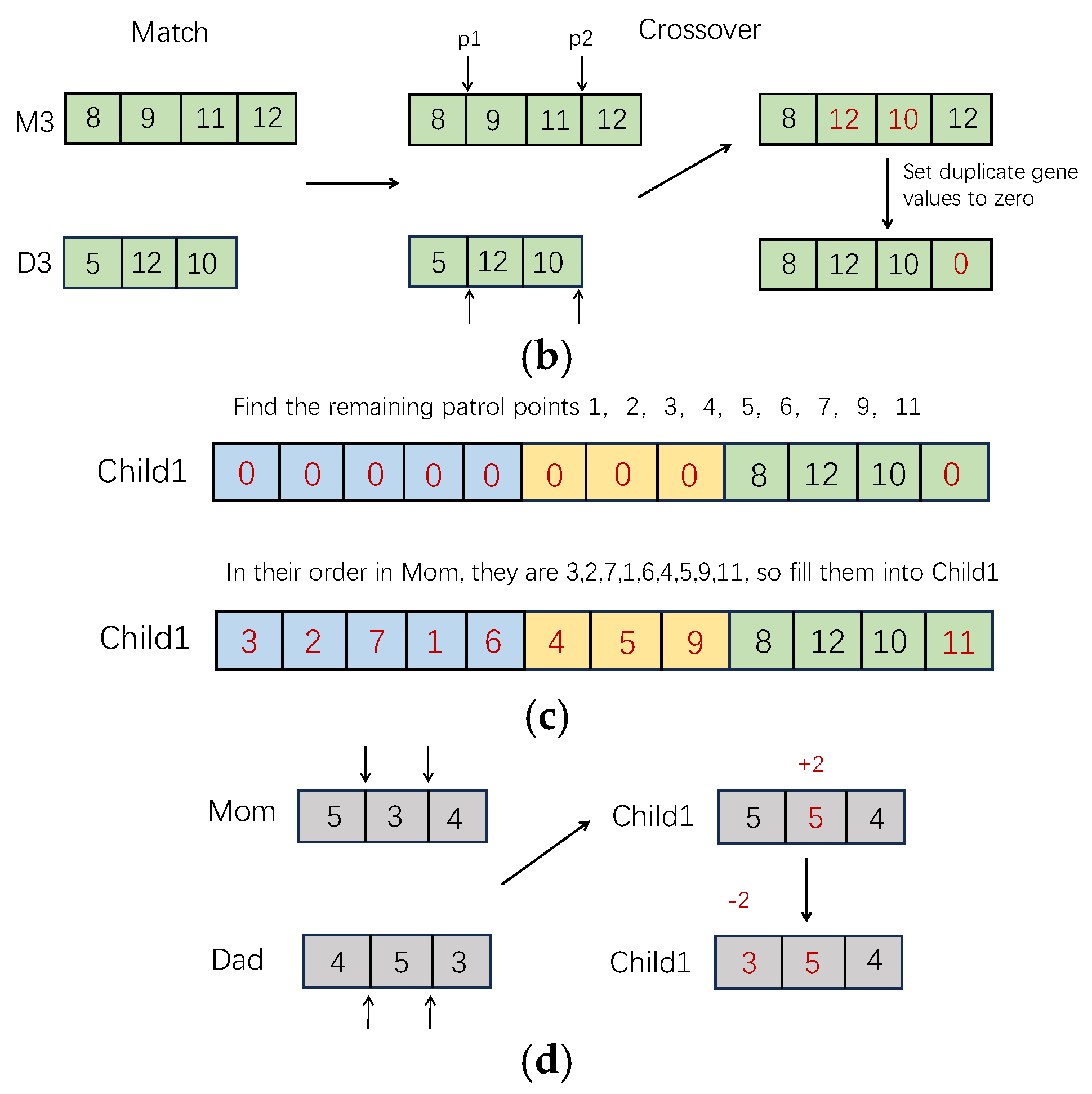
4.4.4. Gene Fragments Crossing Process
5. Experiments
5.1. Experimental Settings
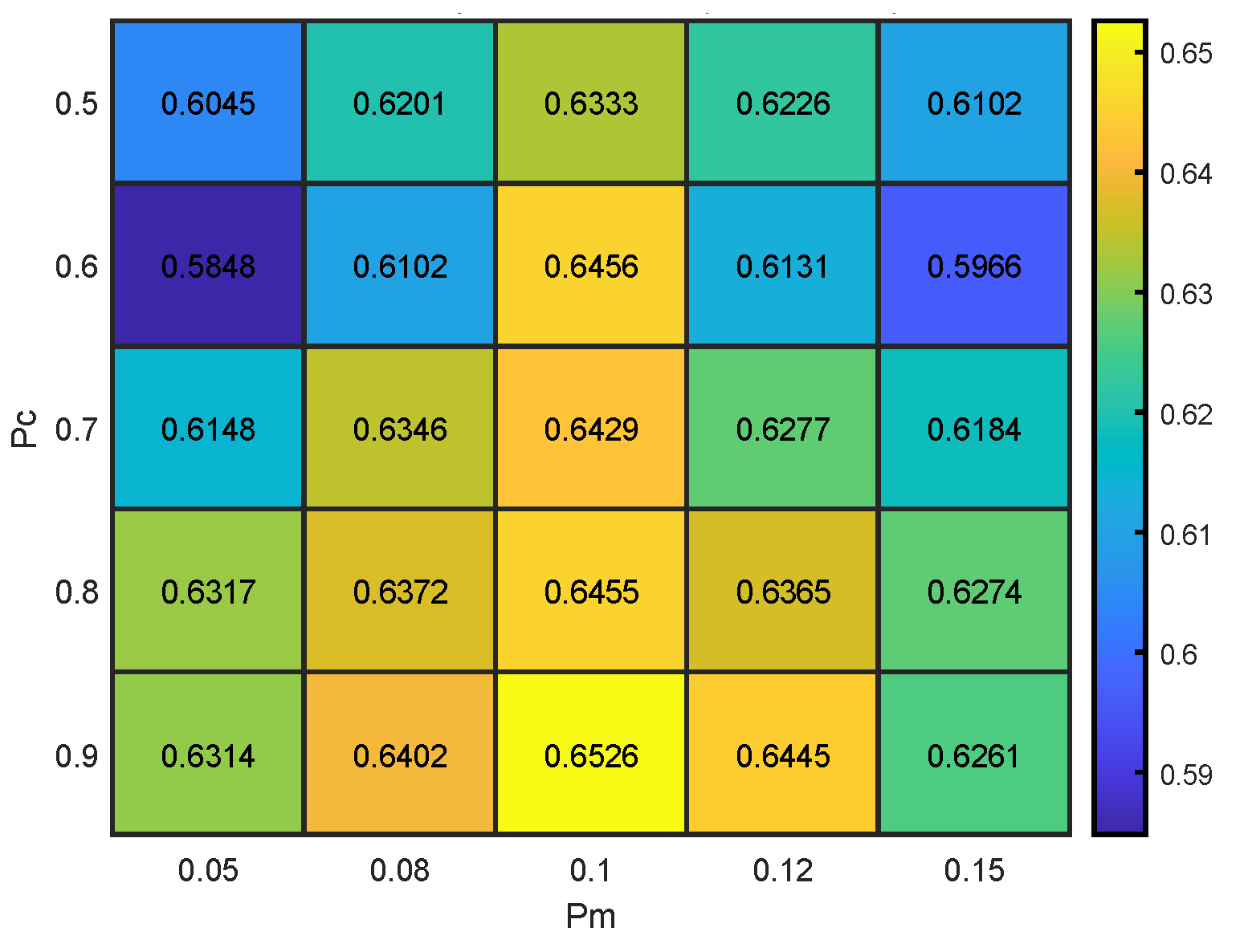
5.2. Parameter Sensitivity Analysis
5.3. Validation Experiment for the PCM-VRAOA
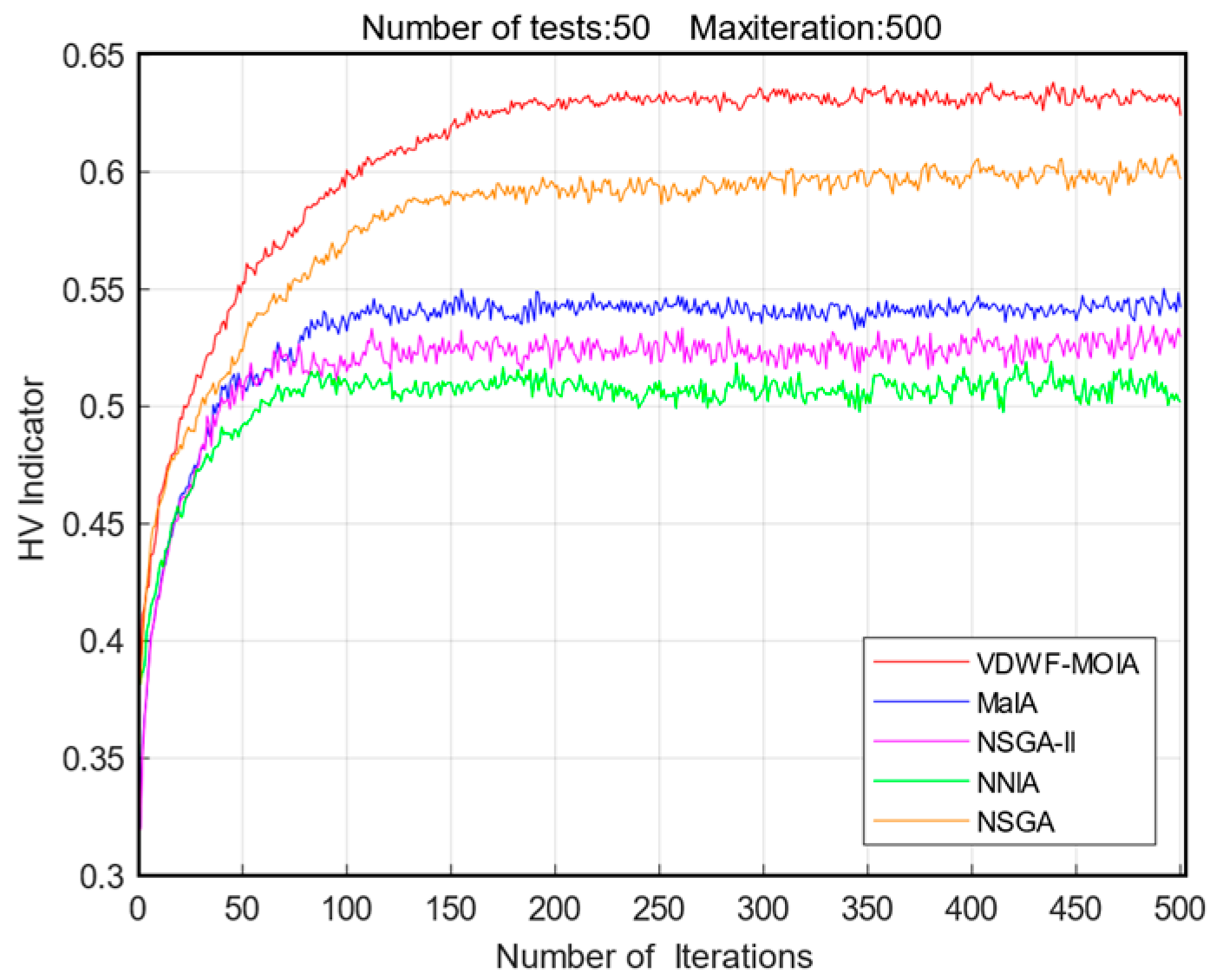
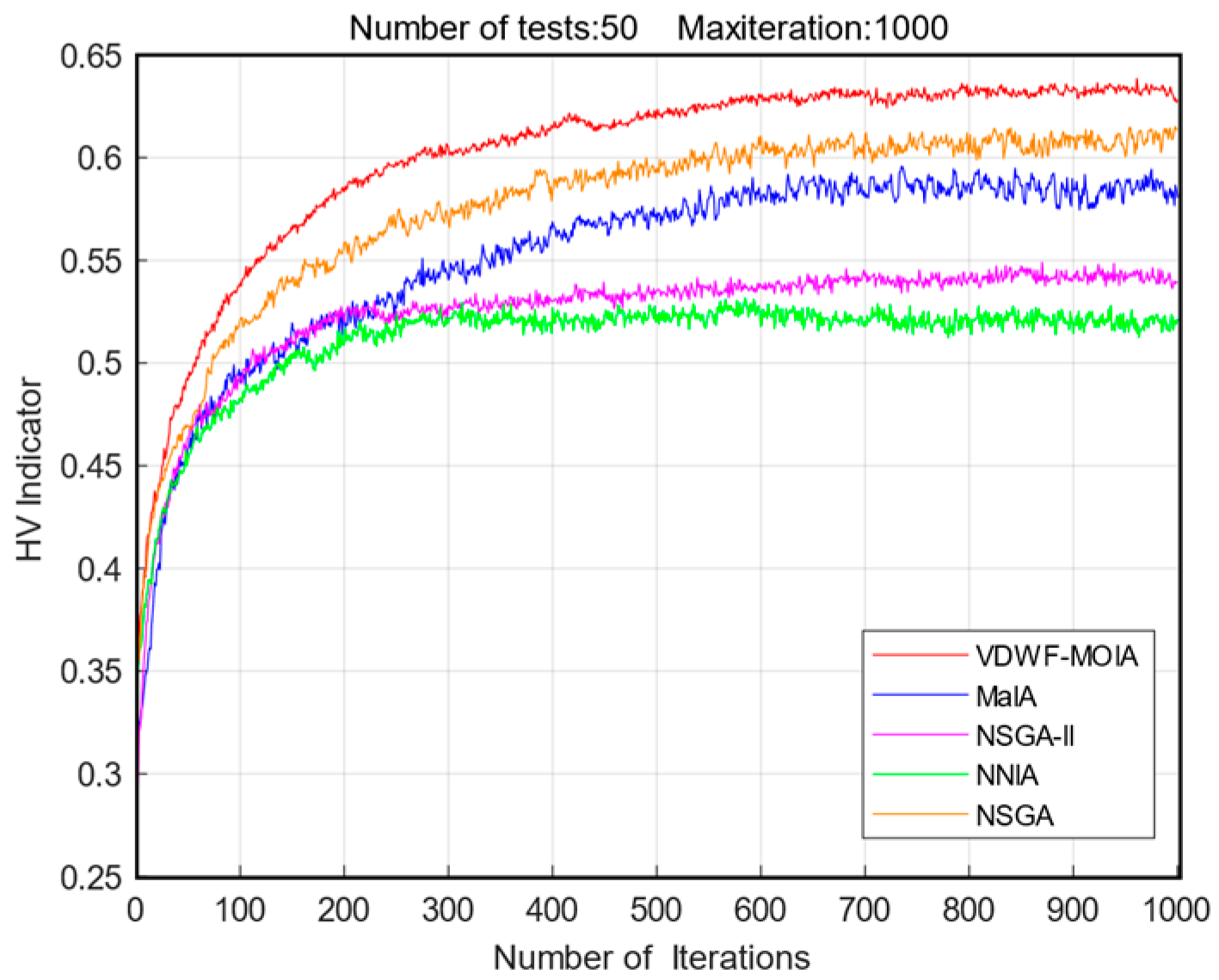
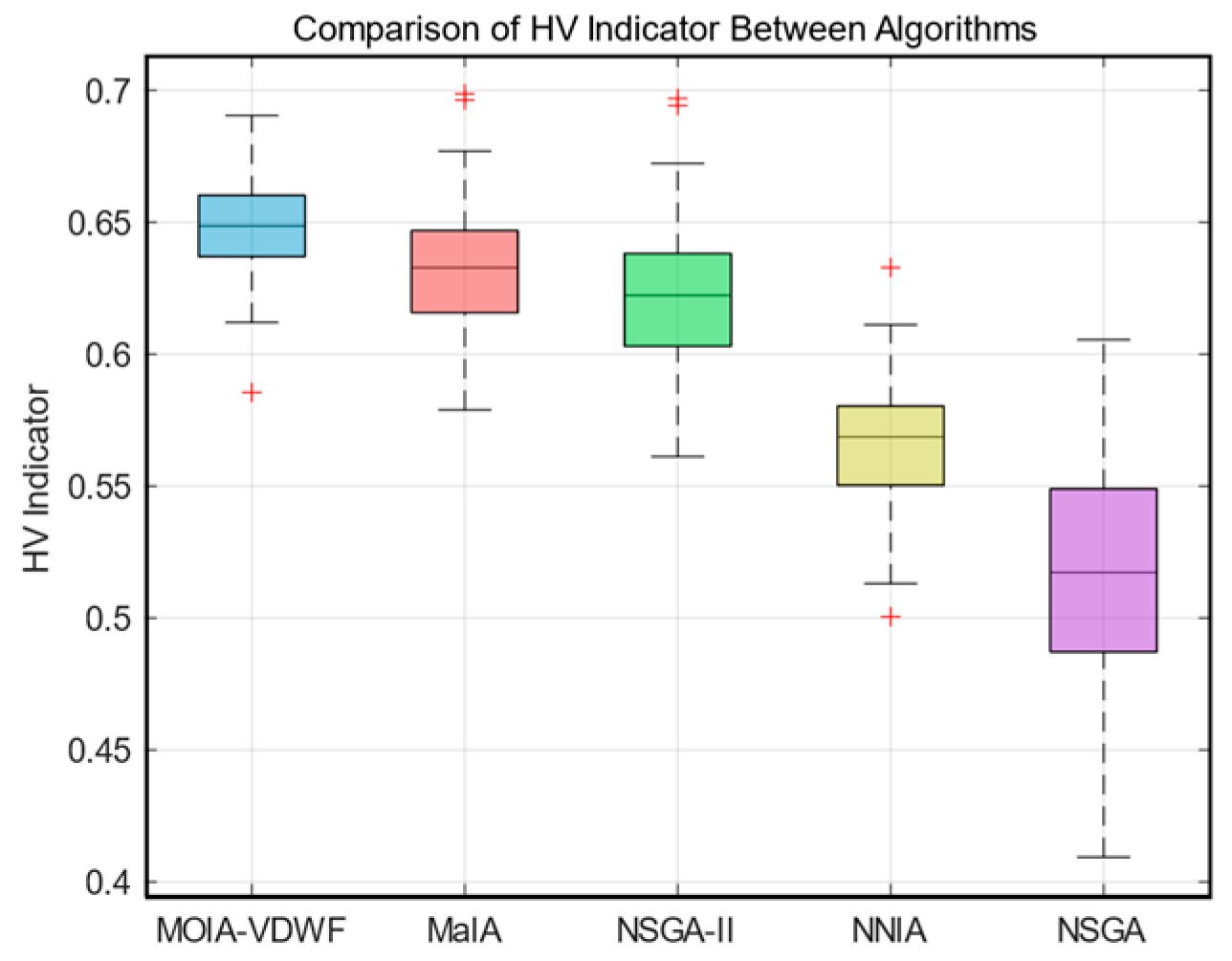
5.4. Comparison with Other Heuristic Algorithms
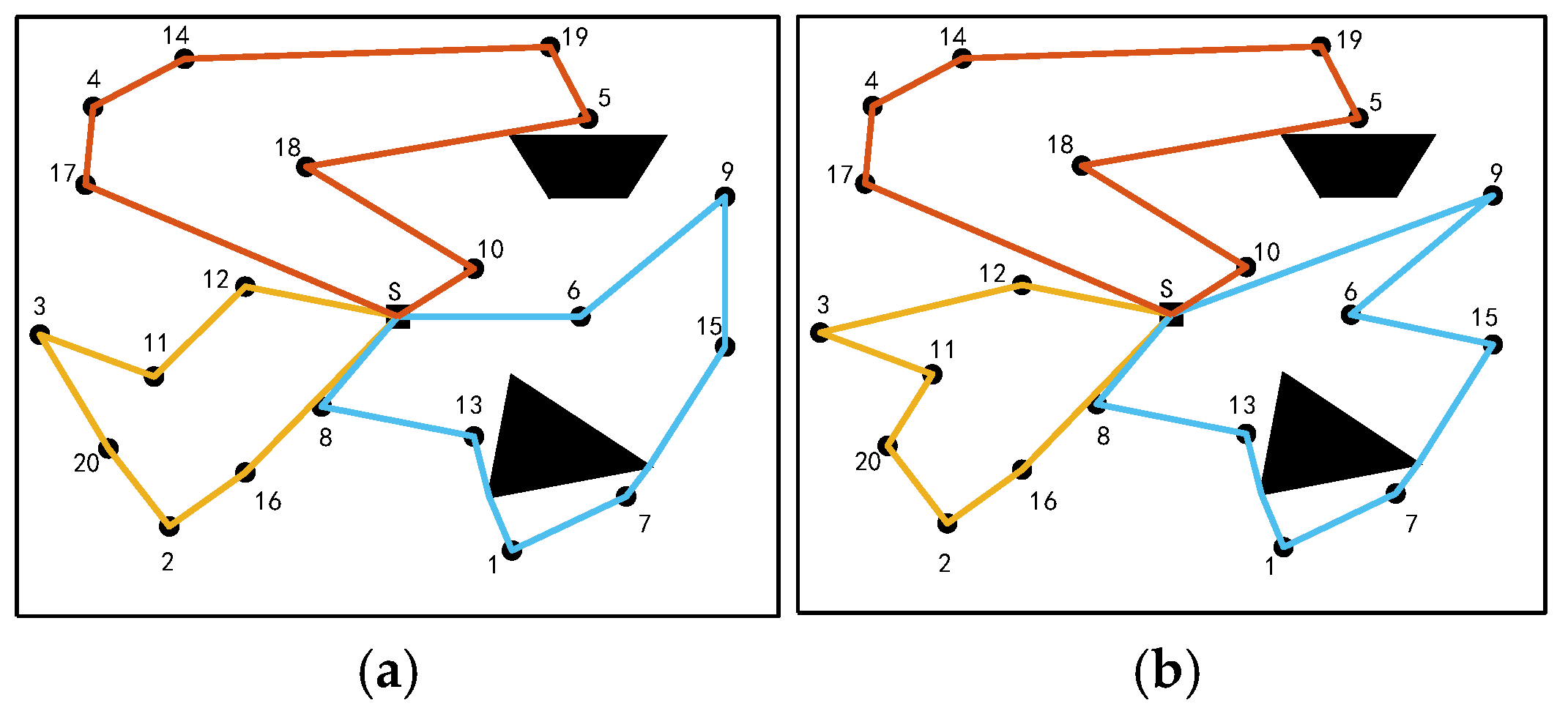
5.5. Simulation Patrol Scheme Diagram
6. Conclusions and Future Work
- This paper proposes a dual-antibody encoding scheme with virtual patrol points. Antibody 1 represents the robot task sequence. Antibody 2 represents the allocation of patrol points. Virtual patrol points expand the representation of the solution space. Traditional immune algorithms usually use a single encoding method. They struggle to represent both task allocation and path planning. This limits diversity and search ability. The proposed scheme makes antibody expressions more diverse. It optimizes task allocation and path planning at the same time, and provides a foundation for future collaborative optimization.
- This paper proposes the PCM-VRAOA method. The method precomputes path costs and obstacle avoidance nodes to ensure both feasibility and optimality. In multi-robot patrolling scenarios, the obstacle environment is complex. Traditional path planning methods struggle to balance obstacle avoidance and global optimization. The proposed method improves the coordination of multi-robot task allocation and path planning. It effectively enhances collaborative optimization, providing reliable support for multi-robot cooperative patrols.
- This paper proposes a crossover operator based on the Van der Waals mechanism. The operator intelligently matches gene segments to improve crossover efficiency and fully utilize the solution space structure. Traditional multi-objective immune optimization algorithms struggle to balance global search and convergence. They easily fall into local optima. Moreover, traditional crossover operators cannot effectively use the structural information of the solution space. In contrast, the proposed operator not only generates better Pareto solutions and significantly accelerates convergence, but also enhances search diversity, thus improving overall optimization performance.
- High Computational Cost: VDWF-MOIA requires significant computing resources due to the complexity of its fitness calculation and the Van der Waals force mechanism. In each iteration, the algorithm evaluates the fitness of all individuals, which relies on PCM-VRAOA to generate obstacle avoidance paths. Additionally, the Van der Waals force mechanism calculates the similarity and distance between all gene fragments, generating a Van der Waals force matrix. This process has a time complexity of , where is the number of gene fragments. As the number of patrol points and robots increases, the computational cost rises significantly. To reduce computational costs, future work will integrate deep learning and reinforcement learning (RL). A deep neural network (DNN) will replace traditional fitness calculations by learning path cost–task assignment mappings offline, significantly reducing online computation time. RL will dynamically adjust VDWF-MOIA parameters (e.g., crossover and mutation rates) to improve convergence speed and resource efficiency. Additionally, parallel computing and approximation techniques will be explored to optimize the Van der Waals force mechanism, further reducing computational overhead.
- Dynamic Environment Adaptability: While VDWF-MOIA excels in static environments, its functionality can be extended to handle dynamic obstacles and real-time patrol changes. To achieve this, a data-driven module will be introduced. This module will use real-time sensor data to detect dynamic obstacles and update the environment model. A data-driven task allocation mechanism will dynamically adjust patrol priorities based on risk levels, ensuring efficient responses to changing environments. Additionally, future work will address hardware and communication challenges by developing lightweight algorithms for resource-constrained robots and designing robust communication protocols to minimize delays and data loss, enhancing multi-robot coordination in dynamic scenarios.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chung, L.-Y. Remote Teleoperated and Autonomous Mobile Security Robot Development in Ship Environment. Math. Probl. Eng. 2013, 2013, 902013. [Google Scholar] [CrossRef]
- Peng, Z.; Chen, B.; Zhang, L.; Qiu, X. Emergency-management-697 oriented model design and realization in artificial society. Manage. Rev. 2016, 28, 133. [Google Scholar]
- Qiu, S.; Chen, B.; Wang, R.; Zhu, Z.; Wang, Y.; Qiu, X. Atmospheric 700 dispersion prediction and source estimation of hazardous gas using 701 artificial neural network, particle swarm optimization and expectation 702 maximization. Atmos. Environ. 2018, 178, 158–163. [Google Scholar] [CrossRef]
- Ishida, H.; Nakayama, G.; Nakamoto, T.; Moriizumi, T. Controlling a gas/odor plume-tracking robot based on transient responses of gas sensors. IEEE Sens. J. 2005, 5, 537–545. [Google Scholar] [CrossRef]
- Xing, Y.; Vincent, T.A.; Fan, H.; Schaffernicht, E.; Bennetts, V.H.; Lilienthal, A.J.; Cole, M.; Gardner, J.W. FireNose on Mobile Robot in Harsh Environments. IEEE Sens. J. 2019, 19, 12418–12431. [Google Scholar] [CrossRef]
- Liang, J.; Wu, J.; Huang, H.; Xu, W.; Li, B.; Xi, F. Soft Sensitive Skin for Safety Control of a Nursing Robot Using Proximity and Tactile Sensors. IEEE Sens. J. 2020, 20, 3822–3830. [Google Scholar] [CrossRef]
- Tolmidis, A.T.; Petrou, L. Multi-objective optimization for dynamic task allocation in a multi-robot system. Eng. Appl. Artif. Intell. 2013, 26, 1458–1468. [Google Scholar] [CrossRef]
- Wu, J.; Wang, H.; Li, N.; Yao, P.; Huang, Y.; Yang, H. Path planning for solar-powered UAV in urban environment. Neurocomputing 2018, 275, 2055–2065. [Google Scholar] [CrossRef]
- Zhuang, Y.; Huang, H.; Sharma, S.; Xu, D.; Zhang, Q. Cooperative path planning of multiple autonomous underwater vehicles operating in dynamic ocean environment. ISA Trans. 2019, 94, 174–186. [Google Scholar] [CrossRef]
- Bai, C.; Kusi-Sarpong, S.; Sarkis, J. An implementation path for green information technology systems in the Ghanaian mining industry. J. Clean. Prod. 2017, 164, 1105–1123. [Google Scholar] [CrossRef]
- Li, R.-G.; Wu, H.-N. Multi-Robot Source Location of Scalar Fields by a Novel Swarm Search Mechanism with Collision/Obstacle Avoidance. IEEE Trans. Intell. Transport. Syst. 2022, 23, 249–264. [Google Scholar]
- Yan, X.; Zuo, H.; Hu, C.; Gong, W.; Sheng, V.S. Load Optimization Scheduling of Chip Mounter Based on Hybrid Adaptive Optimization Algorithm. Complex Syst. Model. Simul. 2023, 3, 1–11. [Google Scholar]
- Yi, X.; Zhu, A.; Li, C.; Yang, S.X. A novel bio-inspired approach with multi-resolution mapping for the path planning of multi-robot system in complex environments. J. Comput. Des. Eng. 2022, 9, 2343–2354. [Google Scholar]
- Deng, X.; Li, R.; Zhao, L.; Wang, K.; Gui, X. Multi-obstacle path planning and optimization for mobile robot. Expert Syst. Appl. 2021, 183, 115445. [Google Scholar]
- Nasrollahy, A.Z.; Javadi, H.H.S. Using Particle Swarm Optimization for Robot Path Planning in Dynamic Environments with Moving Obstacles and Target. In Proceedings of the 2009 Third UKSim European Symposium on Computer Modeling and Simulation, Athens, Greece, 25–27 November 2009; IEEE: New York, NY, USA, 2009; pp. 60–65. [Google Scholar]
- Li, Y.; Yue, T.; Ali, S.; Zhang, L. A multi-objective and cost-aware optimization of requirements assignment for review. In Proceedings of the 2017 IEEE Congress on Evolutionary Computation (CEC), Donostia, Spain, 5–8 June 2017; IEEE: New York, NY, USA, 2017; pp. 89–96. [Google Scholar]
- Almasri, M.M.; Alajlan, A.M.; Elleithy, K.M. Trajectory planning and collision avoidance algorithm for mobile robotics system. IEEE Sens. J. 2016, 16, 5021–5028. [Google Scholar] [CrossRef]
- Bryndin, E. Increased Sensitivity and Safety of Cognitive Robot by Developing Professional and Behavioral Skills. SJET 2020, 5, 187–196. [Google Scholar]
- Dudek, G.; Jenkin, M. Computational Principles of Mobile Robotics, 2nd ed.; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Orozco-Rosas, U.; Montiel, O.; Sepúlveda, R. Mobile robot path planning using membrane evolutionary artificial potential field. Appl. Soft Comput. 2019, 77, 236–251. [Google Scholar]
- Alitappeh, R.J.; Jeddisaravi, K. Multi-robot exploration in task allocation problem. Appl. Intell. 2022, 52, 2189–2211. [Google Scholar] [CrossRef]
- Lemaire, T.; Alami, R.; Lacroix, S. A distributed tasks allocation scheme in multi-UAV context. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April 2004–1 May 2004; IEEE: New York, NY, USA, 2004; pp. 3622–3627. [Google Scholar]
- Zhao, S.; Chen, B.M.; Lee, T.H. Optimal sensor placement for target localisation and tracking in 2D and 3D. Int. J. Control. 2013, 86, 1687–1704. [Google Scholar]
- Trigui, S.; Cheikhrouhou, O.; Koubaa, A.; Baroudi, U.; Youssef, H. FL-MTSP: A fuzzy logic approach to solve the multi-objective multiple traveling salesman problem for multi-robot systems. Soft Comput. 2017, 21, 7351–7362. [Google Scholar]
- Hussein, A.; Adel, M.; Bakr, M.; Shehata, O.M.; Khamis, A. Multi-robot Task Allocation for Search and Rescue Missions. J. Phys. Conf. Ser. 2014, 570, 052006. [Google Scholar]
- Khani, M.; Ahmadi, A.; Hajary, H. Distributed task allocation in multi-agent environments using cellular learning automata. Soft Comput. 2019, 23, 1199–1218. [Google Scholar]
- Wang, B.; Li, S.; Guo, J.; Chen, Q. Car-like mobile robot path planning in rough terrain using multi-objective particle swarm optimization algorithm. Neurocomputing 2018, 282, 42–51. [Google Scholar]
- Ataei, M.; Yousefi-Koma, A. Three-dimensional optimal path planning for waypoint guidance of an autonomous underwater vehicle. Robot. Auton. Syst. 2015, 67, 23–32. [Google Scholar]
- Wang, Z.; Cai, J. The path-planning in radioactive environment of nuclear facilities using an improved particle swarm optimization algorithm. Nucl. Eng. Des. 2018, 326, 79–86. [Google Scholar]
- Milford, M.; Wyeth, G. Hybrid robot control and SLAM for persistent navigation and mapping. Robot. Auton. Syst. 2010, 58, 1096–1104. [Google Scholar]
- Olcay, E.; Lohmann, B. Extension of the Cucker-Dong Flocking with a Virtual Leader and a Reactive Control Law. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; IEEE: New York, NY, USA, 2019; pp. 101–106. [Google Scholar]
- Guerra, M.; Efimov, D.; Zheng, G.; Perruquetti, W. Avoiding local minima in the potential field method using input-to-state stability. Control. Eng. Pract. 2016, 55, 174–184. [Google Scholar]
- Okamoto, M.; Akella, M.R. Novel potential-function-based control scheme for non-holonomic multi-agent systems to prevent the local minimum problem. Int. J. Syst. Sci. 2015, 46, 2150–2164. [Google Scholar]
- Lee, J.; Nam, Y.; Hong, S.; Cho, W. New Potential Functions with Random Force Algorithms Using Potential Field Method. J. Intell. Robot. Syst. 2012, 66, 303–319. [Google Scholar]
- Leonard, N.E.; Fiorelli, E. Virtual leaders, artificial potentials and coordinated control of groups. In Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No.01CH37228), Orlando, FL, USA, 4–7 December 2001; IEEE: New York, NY, USA, 2001; pp. 2968–2973. [Google Scholar]
- Fax, J.A.; Murray, R.M. Information Flow and Cooperative Control of Vehicle Formations. IEEE Trans. Automat. Contr. 2004, 49, 1465–1476. [Google Scholar]
- Olcay, E.; Lohmann, B.; Akella, M.R. An information-driven algorithm in flocking systems for an improved obstacle avoidance. In Proceedings of the 45th Annual Conference of the IEEE Industrial Electronics Society, IECON, Lisbon, Portugal, 14–17 October 2019; IEEE: New York, NY, USA, 2019; Volume 1, pp. 298–304. [Google Scholar]
- Lee, W.; Choi, G.-H.; Kim, T. Visibility graph-based path-planning algorithm with quadtree representation. Appl. Ocean. Res. 2021, 117, 102887. [Google Scholar]
- Wu, Z.; Huang, M.; Zhao, A.; Lan, Z. Urban Traffic Planning and Traffic Flow Prediction based on ulchis gravity model and Dijkstra algorithm. J. Phys. Conf. Ser. 2021, 1972, 012080. [Google Scholar]
- Shah, B.C.; Gupta, S.K. Long-Distance Path Planning for Unmanned Surface Vehicles in Complex Marine Environment. IEEE J. Ocean. Eng. 2020, 45, 813–830. [Google Scholar]
- Chen, X. Dynamic Path Planning of the UAV Avoiding Static and Moving Obstacles. J. Intell. Robot. Syst. 2020, 99, 909–931. [Google Scholar]
- Koenig, S.; Likhachev, M. Fast replanning for navigation in unknown terrain. IEEE Trans. Robot. 2005, 21, 354–363. [Google Scholar]
- Wagner, G.; Choset, H. M*: A complete multirobot path planning algorithm with performance bounds. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: New York, NY, USA, 2011; pp. 3260–3267. [Google Scholar]
- Wagner, G.; Choset, H. Subdimensional expansion for multirobot path planning. Artif. Intell. 2015, 219, 1–24. [Google Scholar]
- Sabir, Z.; Said, S.B.; Al-Mdallal, Q.; Bhat, S.A. A reliable stochastic computational procedure to solve the mathematical robotic model. Expert Syst. Appl. 2024, 238, 122224. [Google Scholar]
- Hao, K.; Zhao, J.; Li, Z.; Liu, Y.; Zhao, L. Dynamic path planning of a three-dimensional underwater AUV based on an adaptive genetic algorithm. Ocean. Eng. 2022, 263, 112421. [Google Scholar] [CrossRef]
- Cui, Y.; Hu, W.; Rahmani, A. Multi-robot path planning using learning-based Artificial Bee Colony algorithm. Eng. Appl. Artif. Intell. 2024, 129, 107579. [Google Scholar]
- Noormohammadi-Asl, A.; Taghirad, H.D. Multi-goal motion planning using traveling salesman problem in belief space. Inf. Sci. 2019, 471, 164–184. [Google Scholar]
- Zhu, T. Maritime patrol tasks assignment optimization of multiple USVs under endurance constraint. Ocean. Eng. 2023, 285, 115445. [Google Scholar] [CrossRef]
- Sea, V.; Sugiyama, A.; Sugawara, T. Frequency-Based Multi-agent Patrolling Model and Its Area Partitioning Solution Method for Balanced Workload. In Integration of Constraint Programming, Artificial Intelligence, and Operations Research; van Hoeve, W.-J., Ed.; Springer International Publishing: Cham, Switzerland, 2018; pp. 530–545. [Google Scholar]
- Lin, Z.; Yue, M.; Chen, G.; Sun, J. Path planning of mobile robot with PSO-based APF and fuzzy-based DWA subject to moving obstacles. Trans. Inst. Meas. Control. 2022, 44, 121–132. [Google Scholar] [CrossRef]
- Jose, K.; Pratihar, D.K. Task allocation and collision-free path planning of centralized multi-robots system for industrial plant inspection using heuristic methods. Robot. Auton. Syst. 2016, 80, 34–42. [Google Scholar] [CrossRef]
- Gao, J.; Zheng, X.; Liu, P.; Yang, P.; Yu, J.; Dai, Y. APF-IBRRT*: A Global Path Planning Algorithm for Obstacle Avoidance Robots With Improved Iterative Search Efficiency. IEEE Access 2024, 12, 124740–124750. [Google Scholar] [CrossRef]
- Lu, M.-K.; Ge, M.-F.; Ding, T.-F.; Liu, Z.-W. SDF-Based Reinforcement Learning for Adaptive Path Planning and Formation Control of Multi-Agent Systems. IEEE Internet Things J. 2025, 1. [Google Scholar] [CrossRef]
- Alharthi, R.; Noreen, I.; Khan, A.; Aljrees, T.; Riaz, Z.; Innab, N. Novel deep reinforcement learning based collision avoidance approach for path planning of robots in unknown environment. PLoS ONE 2025, 20, e0312559. [Google Scholar] [CrossRef]
- Naito, Y.; Jimbo, T.; Odashima, T.; Matsubara, T. Task-priority Intermediated Hierarchical Distributed Policies: Reinforcement Learning of Adaptive Multi-robot Cooperative Transport. In Proceedings of the 2025 IEEE/SICE International Symposium on System Integration (SII), Munich, Germany, 21–24 January 2025; IEEE: New York, NY, USA, 2025; pp. 1556–1562. [Google Scholar]
- Zhao, J.; Wang, Z.; Lv, Y.; Na, J.; Liu, C.; Zhao, Z. Data-Driven Learning for H∞ Control of Adaptive Cruise Control Systems. IEEE Trans. Veh. Technol. 2024, 73, 18348–18362. [Google Scholar] [CrossRef]
- Santiago, A.; Huacuja, H.J.F.; Dorronsoro, B.; Pecero, J.E.; Santillan, C.G.; Barbosa, J.J.G.; Monterrubio, J.C.S. A Survey of Decomposition Methods for Multi-objective Optimization. In Recent Advances on Hybrid Approaches for Designing Intelligent Systems; Castillo, O., Melin, P., Pedrycz, W., Kacprzyk, J., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 453–465. [Google Scholar]
- Liu, J.; Yang, J.; Liu, H.; Tian, X.; Gao, M. An improved ant colony algorithm for robot path planning. Soft Comput. 2017, 21, 5829–5839. [Google Scholar] [CrossRef]
- Masehian, E.; Sedighizadeh, D. Multi-Objective PSO- and NPSO-based Algorithms for Robot Path Planning. AECE 2010, 10, 69–76. [Google Scholar] [CrossRef]
- Huang, L.; Zhou, M.; Hao, K. Non-Dominated Immune-Endocrine Short Feedback Algorithm for Multi-Robot Maritime Patrolling. IEEE Trans. Intell. Transport. Syst. 2020, 21, 362–373. [Google Scholar] [CrossRef]
- Sharma, M.; Voruganti, H.K. Multi-objective optimization approach for coverage path planning of mobile robot. Robotica 2024, 42, 2125–2149. [Google Scholar]
- Botros, A.; Wilde, N.; Sadeghi, A.; Alonso-Mora, J.; Smith, S.L. Regret-Based Sampling of Pareto Fronts for Multi-objective Robot Planning Problems. IEEE Trans. Robot. 2024, 40, 3778–3794. [Google Scholar]
- Dai, L.-L.; Pan, Q.-K.; Miao, Z.-H.; Suganthan, P.N.; Gao, K.-Z. Multi-Objective Multi-Picking-Robot Task Allocation: Mathematical Model and Discrete Artificial Bee Colony Algorithm. IEEE Trans. Intell. Transport. Syst. 2024, 25, 6061–6073. [Google Scholar] [CrossRef]
- Gong, T.; Tuson, A.L. Differential Evolution for Binary Encoding. In Soft Computing in Industrial Applications; Springer: Berlin/Heidelberg, Germany, 2007; pp. 251–262. [Google Scholar]
- Pareto, V.; Cours, D. Economic Politique; Rouge: Lausanne, Switzerland, 1896. [Google Scholar]
- Yu, X.; Liu, N.; Huang, W.; Qian, X.; Zhang, T. A Node Deployment Algorithm Based on Van Der Waals Force in Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2013, 9, 505710. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Li, C. Global path planning based on a bidirectional alternating search A* algorithm for mobile robots. Ind. Eng. 2022, 168, 108123. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Srinivas, N.; Deb, K. Muiltiobjective Optimization Using Nondominated Sorting in Genetic Algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Gong, M.; Jiao, L.; Du, H.; Bo, L. Multiobjective Immune Algorithm with Nondominated Neighbor-Based Selection. Evol. Comput. 2008, 16, 225–255. [Google Scholar] [CrossRef]
- Su, Y.; Luo, N.; Lin, Q.; Li, X. Many-objective optimization by using an immune algorithm. Swarm Evol. Comput. 2022, 69, 101026. [Google Scholar]
- Yang, C.; Ding, J. Constrained dynamic multi-objective evolutionary optimization for operational indices of beneficiation process. J. Intell. Manuf. 2019, 30, 2701–2713. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Type | Advantage | Drawback |
|---|---|---|---|
| Dijkstra/A* | graph-based search | ensure the shortest path | high computational complexity |
| GA | metaheuristic algorithm | strong global search ability | complex parameter tuning |
| APF | local planning algorithm | strong dynamic real-time performance | prone to fall into local optimum |
| SDF-FPP | hierarchical reinforcement learning | suitable for unknown environments | limited dynamic obstacle avoidance capability |
| APF-IBRRT* | hybrid algorithm | improve the search efficiency in narrow environments | large memory consumption |
| Deep Q-learning | deep reinforcement learning | adapt to complex environments | long training time |
| Map | Patrol Point Number | Obstacle Number | Robot Number |
|---|---|---|---|
| Map 1 | 20 | 2 | 3 |
| Map 2 | 30 | 3 | 4 |
| Map 3 | 50 | 5 | 6 |
| Popsize | HV | Running Time |
|---|---|---|
| 50 | 0.6167 | 25.97 |
| 100 | 0.6526 | 48.75 |
| 150 | 0.6547 | 61.11 |
| 200 | 0.6625 | 77.46 |
| Map | MOIA w/PCM-VRAOA | MOIA w/A* | MOIA w/BAS-A* | MOIA w/RRT* |
|---|---|---|---|---|
| Map 1 | 50.94 ± 2.40 | 16.61 ± 0.90 | 16.53 ± 1.52 | 66.39 ± 8.47 |
| Map 2 | 265.70 ± 6.49 | 106.99 ± 5.24 | 95.85 ± 7.42 | 383.26 ± 31.65 |
| Map 3 | 2302.03 ± 298.29 | 470.79 ± 46.46 | 437.56 ± 39.64 | 855.12 ± 50.31 |
| Map | MOIA w/PCM-VRAOA | MOIA w/A* | MOIA w/BAS-A* | MOIA w/RRT* |
|---|---|---|---|---|
| Map 1 | 592.11 ± 87.35 | 781.23 ± 93.38 | 706.70 ± 90.51 | 824.83 ± 92.65 |
| Map 2 | 773.93 ± 148.77 | 1136.80 ± 143.67 | 958.84 ± 135.71 | 1225.33 ± 136.31 |
| Map 3 | 1193.24 ± 200.53 | 1390.96 ± 229.77 | 1287.47 ± 188.64 | 1446.53 ± 166.13 |
| Map | MOIA w/PCM-VRAOA | MOIA w/A* | MOIA w/BAS-A* | MOIA w/RRT* |
|---|---|---|---|---|
| Map 1 | 12.34 ± 6.11 | 18.90 ± 6.58 | 16.04 ± 5.55 | 37.96 ± 8.53 |
| Map 2 | 8.69 ± 4.97 | 16.56 ± 3.65 | 12.41 ± 5.62 | 40.88 ± 11.28 |
| Map 3 | 9.28 ± 5.24 | 18.71 ± 4.93 | 17.26 ± 5.37 | 27.63 ± 10.34 |
| Item | Value | Algorithm |
|---|---|---|
| Mutation probability | 0.1 | All |
| Crossover probability | 0.9 | All |
| Size of memory cell | 20 | VDWF-MOIA |
| Size of clone population | 80 | NNIA, MaIA |
| Maximum size of active population | 20 | NNIA |
| Maximum size of dominant population | 30 | NNIA |
| Map | VDWF-MOIA vs. MaIA | VDWF-MOIA vs. NSGAII | VDWF-MOIA vs. NNIA | VDWF-MOIA vs. NSGA |
|---|---|---|---|---|
| Map 1 | ||||
| Map 2 | ||||
| Map 3 |
| Map | |||
|---|---|---|---|
| Map 1 | (a) | 485.350 | 2.742 |
| (b) | 501.060 | 1.692 | |
| Map 2 | (a) | 646.696 | 8.777 |
| (b) | 683.758 | 5.086 | |
| Map 3 | (a) | 902.713 | 15.178 |
| (b) | 957.182 | 11.685 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, T.; Huang, L.; Han, H. An Effective Path Planning Method Based on VDWF-MOIA for Multi-Robot Patrolling in Expo Parks. Electronics 2025, 14, 1222. https://doi.org/10.3390/electronics14061222
Guo T, Huang L, Han H. An Effective Path Planning Method Based on VDWF-MOIA for Multi-Robot Patrolling in Expo Parks. Electronics. 2025; 14(6):1222. https://doi.org/10.3390/electronics14061222
Chicago/Turabian StyleGuo, Tianyi, Li Huang, and Hua Han. 2025. "An Effective Path Planning Method Based on VDWF-MOIA for Multi-Robot Patrolling in Expo Parks" Electronics 14, no. 6: 1222. https://doi.org/10.3390/electronics14061222
APA StyleGuo, T., Huang, L., & Han, H. (2025). An Effective Path Planning Method Based on VDWF-MOIA for Multi-Robot Patrolling in Expo Parks. Electronics, 14(6), 1222. https://doi.org/10.3390/electronics14061222