1. Introduction
V2V communication is a cornerstone of intelligent transportation systems (ITSs), enabling vehicles to exchange information in real time to enhance road safety, traffic management, and the driving experience [
1,
2,
3]. With the advent of driverless cars and advanced cruise control systems, the demand for robust and reliable V2V communication has increased significantly [
4,
5]. These technologies rely on V2V communication for critical functionalities such as collision avoidance, coordinated braking, and platoon driving, where vehicles move in tightly spaced groups to improve efficiency and reduce energy consumption [
6,
7,
8,
9]. Recent advancements in connected and automated vehicles (CAVs) further underscore the need for sophisticated V2V communication strategies, particularly in complex traffic scenarios. For example, a multi-agent system (MAS)-based hierarchical control approach has been proposed to enhance CAV cooperation, addressing the increasing complexity of managing vehicular interactions in dynamic environments [
10]. However, ensuring the safety, reliability, and security of these systems in highly dynamic and interference-prone environments presents a significant challenge to the automotive industry and regulatory bodies alike [
11].
V2V communication plays a pivotal role in mitigating risks associated with autonomous driving [
12,
13]. The seamless and reliable exchange of information between autonomous vehicles is essential to prevent accidents caused by system failures, communication delays, or signal interference. As the number of connected vehicles continues to grow, the likelihood of interference intensifies, which can compromise overall system safety. Techniques such as beamforming and null steering have emerged as key solutions to manage this interference, optimizing the reception of desired signals while suppressing unwanted ones [
14,
15,
16]. Beamforming dynamically adjusts antenna radiation patterns to maximize the Signal-to-Interference-plus-Noise Ratio (SINR) [
17,
18], while null steering places nulls in the direction of interferers, effectively isolating interference and enhancing communication reliability [
19,
20].
A critical challenge in maintaining robust V2V communication is the effect of positional errors. In real-world driving environments, accurately estimating the position of nearby vehicles becomes increasingly difficult due to factors like sensor inaccuracies and unpredictable traffic movements [
21,
22]. Positional inaccuracies can significantly degrade the performance of beamforming and null steering, leading to suboptimal SINR values and increased Bit Error Rate (BER) [
23]. This issue is particularly pronounced in autonomous and assisted driving applications, where timely and precise information exchange is fundamental for safety [
24,
25]. Moreover, complex road configurations, such as multi-lane highways and urban intersections, along with dynamic traffic conditions, exacerbate these issues by causing rapid positional shifts [
26]. Traditional models, which typically assume static or simplified traffic scenarios, fail to capture these intricacies, particularly the presence of multiple interferers and the need for adaptive signal processing. Prior studies have explored adaptive beamforming and null steering techniques, highlighting their strengths and limitations. For instance, Patra and Nayak [
27] analyzed the trade-offs in convergence speed and computational complexity among different beamforming methods, while [
28] demonstrated significant gains in interference mitigation using an improved null steering algorithm. However, these studies often focus on isolated aspects of interference mitigation and do not fully address dynamic vehicular environments or positional inaccuracies. Recent studies have emphasized the need for more comprehensive models that consider these real-world complexities [
29,
30]. To address these challenges, this study proposes a framework capable of integrating various beamforming algorithms, offering flexibility and adaptability to dynamically manage interference across diverse vehicular configurations.
Given the critical need to ensure reliability in such dynamic environments, this paper proposes a novel simulation framework to evaluate the performance of V2V communication networks. This framework addresses limitations in existing models, which often fail to incorporate the effects of positional inaccuracies and interference dynamics in realistic vehicular settings. The proposed framework systematically integrates adaptive beamforming and null steering techniques to model interference mitigation while analyzing the effects of positional inaccuracies. It is designed to accommodate diverse road configurations, including highways, intersections, and urban traffic conditions, enabling a realistic evaluation of SINR performance. By incorporating real-world traffic patterns, varying vehicular densities, and dynamic interference scenarios, the framework provides crucial insights for improving V2V communication, particularly in autonomous driving systems where safety and reliability are paramount. The key contributions of this paper are as follows:
Development of a Novel V2V Communication Framework: The paper introduces a comprehensive simulation framework for diverse V2V communication scenarios, integrating adaptive beamforming and null steering techniques to evaluate interference mitigation and the impact of positional errors.
Analysis of Positional Errors and Null Steering Performance: The framework systematically examines how positional inaccuracies affect both perfect and imperfect null steering, providing insights into SINR degradation and the importance of accurate positioning.
Evaluating SINR Performance Under Dynamic Conditions: The study explores the impact of increasing nulls and positional inaccuracies on SINR, highlighting diminishing returns in complex environments and emphasizing the need for dynamic interference management strategies.
This framework was implemented and validated using MATLAB R2024b (MathWorks, Natick, MA, USA), replicating real-world V2V scenarios under varying conditions, including perfect null steering and worst-case scenarios with significant positional errors. The results underscore the necessity of advanced beamforming algorithms to manage interference and ensure robust communication in autonomous and driverless vehicles.
The remainder of this paper is structured as follows:
Section 2 describes the comprehensive framework for realistic V2V environments.
Section 3 outlines the simulation parameters and analysis techniques.
Section 4 presents the performance evaluation across two distinct vehicular scenarios. Finally,
Section 5 concludes the study.
2. Proposed Comprehensive Simulation Framework for V2V Communication Networks
As V2V communication technology evolves to address the complexities of modern driving environments, there is a pressing need for a versatile and comprehensive simulation framework that would capture the nuances of real-world road conditions, where factors such as interference, positional inaccuracies, and environmental obstacles would be accounted for in evaluating communication reliability and performance [
31,
32]. We propose a framework that integrates a broad range of parameters—including generic, model-specific, and error-related factors—within this novel unified simulation structure. This integrated approach provides a robust platform to evaluate parameters such as SINR across diverse conditions, offering critical insights for designing resilient V2V systems that maintain high communication quality even in challenging scenarios.
The motivation for this framework arises from the need to simulate both ideal and non-ideal conditions across varied road configurations, enabling a thorough evaluation of V2V communication performance. Unlike traditional models that generalize road environments, our framework explicitly categorizes road types such as highways, urban streets, intersections, roundabouts, convoy/platooning formations, and high-density traffic scenarios where each is chosen for its distinct communication dynamics and interference challenges. By modeling specific road types, the framework effectively addresses a wide range of real-world challenges encountered in V2V networking use cases, from minimal-interference conditions to highly complex, interference-rich environments.
The proposed framework shown in
Figure 1 is structured around three interconnected modules:
Road Model Building Blocks,
V2V System Model, and
Performance Evaluation. These modules are logically connected to simulate, model, and analyze V2V communication in diverse traffic scenarios. The Road Model Building Blocks provide foundational parameters and configurations spanning generic setups, model-specific details, road configurations, and spatial processing algorithms that serve as input to the V2V System Model. The V2V System Model translates these inputs into detailed vehicular traffic and communication flow simulations, incorporating lane setups, vehicle behaviors, and system-specific dynamics. These simulated data are then analyzed in the Performance Evaluation module, which assesses key metrics to determine system efficiency. Insights from Performance Evaluation can feed back into the earlier modules, allowing for iterative refinement of parameters and configurations. This modular and iterative design ensures a comprehensive, adaptable framework capable of addressing real-world challenges in V2V communication networks.
2.1. Road Model Building Blocks
The Building Blocks, as depicted in the leftmost section of
Figure 1, form the foundation of the framework and consist of four critical subcomponents:
Generic Parameters,
Model-Specific Parameters,
Road Configurations, and
Spatial-Processing Algorithms. These components address distinct aspects of V2V communication network scenarios, ensuring adaptability and precision.
To provide a clearer understanding of the roles and distinctions of each submodule, we elaborate on their specific functions within the Building Blocks. The Generic Parameters submodule establishes foundational configurations critical to ensuring reliable V2V communication across diverse environments, including key factors such as carrier frequency and beamforming techniques that affect performance under varying traffic scenarios. The Model-Specific Parameters submodule tailors these baseline configurations to address unique environmental conditions, such as accounting for Doppler effects in high-speed scenarios or mitigating shadowing in dense urban settings. The Road Configurations submodule defines the structural and operational characteristics of different traffic scenarios, such as highways, intersections, and urban streets, enabling the framework to emulate real-world challenges with high fidelity. Finally, the Spatial Processing Algorithms submodule focuses on optimizing signal integrity and network reliability through advanced techniques such as adaptive beamforming and MIMO spatial multiplexing, dynamically addressing interference and improving overall communication effectiveness in complex vehicular environments. Together, these submodules provide a modular and adaptable foundation, ensuring the framework’s robustness across a wide range of V2V network scenarios.
2.1.1. Generic Parameters
Generic parameters establish baseline configurations applied across all road scenarios. They include carrier frequency, channel bandwidth, antenna configurations, propagation models, and transmit power. For example, the choice of a carrier frequency at 5.9 GHz—commonly adopted in modern V2V communication systems like Cellular Vehicle-to-Everything (C-V2X) [
33] and 5G New Radio (NR) V2X [
34]—balances coverage and signal quality. This frequency band is particularly effective in urban areas where moderate multipath interference is common, ensuring reliable communication amidst reflections from buildings and other structures. The Rayleigh and Two-Ray Reflection models used in our proposed framework represent the unique characteristics of urban multipath and highway line-of-sight (LoS) conditions, respectively [
35,
36].
Table 1 outlines an example use case given the simulation’s core parameters, employed in our proposed framework including a 10 MHz channel bandwidth, which is compatible with both the C-V2X and 5G NR standards. A 16-element antenna array with
spacing enables effective beamforming for interference mitigation. Zero-Forcing (ZF) beamforming is selected for its ability to suppress interference by nullifying signals in the direction of interferers, making it well suited for interference-dominant scenarios [
37]. Doppler shifts are computed based on highway speeds to accurately model high-speed vehicular environments [
38]. It should be noted that without loss in generality, our proposed framework can be employed in other operating environments using other system parameters to model-specific V2V networking use cases.
For this specific use case, the selection of these parameters impacts performance under specific traffic scenarios. For instance, operation of this V2V communication network at 5.9 GHz provides a balance between range and data rate, making it suitable for urban environments with moderate multipath interference. The 16-element antenna array facilitates narrow beam widths for precise beamforming, which is essential in high-density traffic to reduce interference.
2.1.2. Model-Specific Parameters
Model-specific parameters address unique features of individual road scenarios, such as Doppler shifts in high-speed highway environments or shadowing effects in dense urban areas. For example, urban scenarios involve significant multipath interference caused by buildings and street infrastructure, necessitating advanced beamforming and interference mitigation techniques [
29]. Conversely, highways are influenced by rapid changes in vehicle velocity, requiring real-time antenna pattern adaptations to account for Doppler effects.
2.1.3. Road Configurations
Road configurations define the structural layout and traffic patterns for specific scenarios, such as rural highways, urban streets, intersections, and roundabouts. For example, rural highways exhibit predictable traffic movement, allowing long-range communication with minimal obstructions, while urban streets introduce complex dynamics with frequent signal occlusions [
30]. Returning back to our proposed framework illustrated in
Figure 1, we observe six predefined road types, each designed to emulate real-world challenges:
Highways: Assess Doppler shifts and long-range communication.
Urban Streets: Model multipath interference and Non-Line-of-Sight (NLoS) conditions.
Intersections: Test system adaptability under frequent directional changes, where vehicles approach from multiple directions, creating significant challenges in maintaining beam alignment and avoiding cross-interference.
Roundabouts: Evaluate continuous beam adjustments for vehicles navigating curved paths, accounting for multipath interference and frequent directional shifts that increase communication complexity.
Convoy/Platooning Formations: Evaluate close-proximity communication and synchronized movement.
High-Density Traffic Scenarios: Simulate severe interference challenges typical in congested areas.
By incorporating these scenarios, the framework enhances both flexibility and realism, making it a valuable tool for evaluating V2V systems in both controlled and unpredictable environments.
2.1.4. Spatial Processing Algorithms
The spatial processing algorithm subcomponent incorporates advanced beamforming techniques and adaptive null steering to dynamically adjust antenna arrays for interference suppression and SINR optimization [
16,
19]. These algorithms are particularly effective in high-density traffic scenarios, such as urban areas with heavy congestion or platooning configurations, where interference from nearby vehicles is significant. By dynamically adjusting beam patterns, the system can mitigate interference in real time, maintaining reliable communication links [
39].
To further enhance the framework’s capability, techniques such as LMS adaptive filtering are employed for interference mitigation. LMS beamforming provides a computationally efficient method for adapting antenna array weights in real time, optimizing SINR even under dynamic vehicular scenarios [
40,
41]. Similarly, MIMO (Multiple-Input Multiple-Output) systems play a critical role in improving V2V communication by utilizing spatial diversity to enhance channel capacity and reliability [
42]. These methods, when integrated into the framework, enable spatial multiplexing, which is particularly effective in leveraging multi-stream transmissions to maximize data throughput in V2V networks [
43].
Spatial multiplexing has been extensively utilized in V2V communication to improve spectral efficiency and enable simultaneous transmission of multiple data streams between vehicles. For example, in urban traffic scenarios, spatial multiplexing techniques have been shown to mitigate interference and enhance data rates even in high-density environments [
44]. Additionally, by combining spatial multiplexing with MIMO configurations, V2V systems can achieve robust performance against channel fading and interference, ensuring stable communication links in dynamic road conditions.
This subcomponent thus integrates a variety of spatial processing techniques, including LMS beamforming, MIMO configurations, and spatial multiplexing, to address the challenges of interference and optimize the SINR in diverse vehicular scenarios. The inclusion of these advanced algorithms ensures the adaptability of the framework to both high-density and low-density traffic conditions, making it a comprehensive solution for modern V2V communication systems.
2.2. V2V System Model
The V2V System Model translates physical road configurations into computational models that define vehicle behaviors, lane setups, and communication flows, as depicted in the middle section of
Figure 1. This component facilitates the conversion of real-world road scenarios into detailed system-level models for comprehensive simulation.
Simulation environments such as SUMO (Simulation of Urban MObility) and Veins (Vehicles in Network Simulation) provide foundational tools for modeling realistic vehicular traffic and communication flows. SUMO offers detailed traffic modeling capabilities, such as multi-lane road configurations and dynamic vehicle behavior [
45], while Veins integrates network simulations using OMNeT++ to emulate communication patterns. These tools can be effectively leveraged to construct accurate V2V System Models [
46]. Additionally, MATLAB-based frameworks developed by researchers like [
47] provide customizable tools for simulating V2V network behaviors, including interference modeling and beamforming algorithms.
For instance, the Case 1 vehicular model (see
Figure 2) represents a two-lane highway with opposing traffic, designed to evaluate the impact of high-speed motion and LoS interference on SINR. In this model, the transmitter (TX) and receiver (RX) vehicles are situated in adjacent lanes, traveling in opposite directions. The lanes have a width of 3.5 m, with the TX located in one lane and the RX in the other, separated by a distance of 400 m. Interfering vehicles, labeled
,
, and
, are positioned in both lanes to simulate typical highway traffic. Both perfect and imperfect null steering techniques are included, highlighting positional errors (
,
,
, and
) that affect SINR performance.
Similarly, the Case 2 vehicular model (see
Figure 3) represents a more complex, multi-lane highway with mixed-direction traffic. This configuration features two lanes in each direction, separated by a 0.5-m divider. The TX and RX vehicles are positioned in opposing lanes, separated by 400 m. Additional interfering vehicles, labeled
through
, are distributed across the lanes, simulating high-density traffic typical of urban highways. Positional errors (
through
and
) are also modeled, reflecting challenges in mitigating interference and maintaining reliable communication.
By assigning specific roles to vehicles as transmitters, receivers, or interferers, the V2V System Model supports a realistic and scalable simulation of V2V communication dynamics. This structure enables detailed analysis of interference management techniques and SINR performance under varied road configurations, ensuring the framework can address both simple and complex vehicular environments.
Positional errors are integrated across all road configurations to reflect real-world GPS inaccuracies and sensor limitations. These inaccuracies are critical to model, as they can significantly degrade the performance of beamforming and null steering algorithms, leading to suboptimal SINR values and increased BER [
23]. By incorporating positional errors into the system model, the framework evaluates the robustness of V2V communication strategies under realistic conditions.
2.3. Performance Evaluation
The Performance Evaluation component assesses the framework’s effectiveness using metrics such as SINR [
48], BER [
49], and Packet Delivery Ratio (PDR) [
50]. It evaluates the impact of system parameters, including the number of nulls and positional errors, on overall performance. For instance, the relationship between SINR and distance is analyzed for both perfect and imperfect null steering configurations, providing insights into interference suppression under varying conditions. Additionally, robustness tests introduce positional inaccuracies to evaluate the framework’s resilience in dynamic environments.
By linking these metrics back to specific aspects of the framework, such as how spatial processing algorithms influence SINR or how road configurations affect PDR, the evaluation provides a comprehensive understanding of system performance. This approach ensures that the framework not only measures performance under controlled conditions but also assesses its adaptability in realistic, dynamic environments.
In summary, the proposed framework integrates road configurations, system modeling, and performance evaluation to enable a realistic and adaptable simulation of V2V communication scenarios. By addressing both ideal and non-ideal conditions, it provides valuable insights into the challenges and opportunities for optimizing V2V systems. The incorporation of modern communication technologies, such as C-V2X and 5G NR, ensures the framework’s relevance in advancing intelligent transportation technologies.
Through detailed modeling of various road scenarios, advanced spatial processing algorithms, and comprehensive performance metrics, the framework serves as a critical tool for researchers and engineers. It facilitates the development of robust V2V communication strategies capable of maintaining high communication quality even in challenging and dynamic environments.
3. Model-Specific Parameters and Interference Management in V2V Communication Networks
In V2V communication, system performance is typically assessed under two key conditions:
ideal scenarios and
non-ideal scenarios.
Ideal scenarios represent environments with clear LoS, predictable traffic flows, and minimal interference, making them suitable benchmarks for achieving optimal system performance. Conversely,
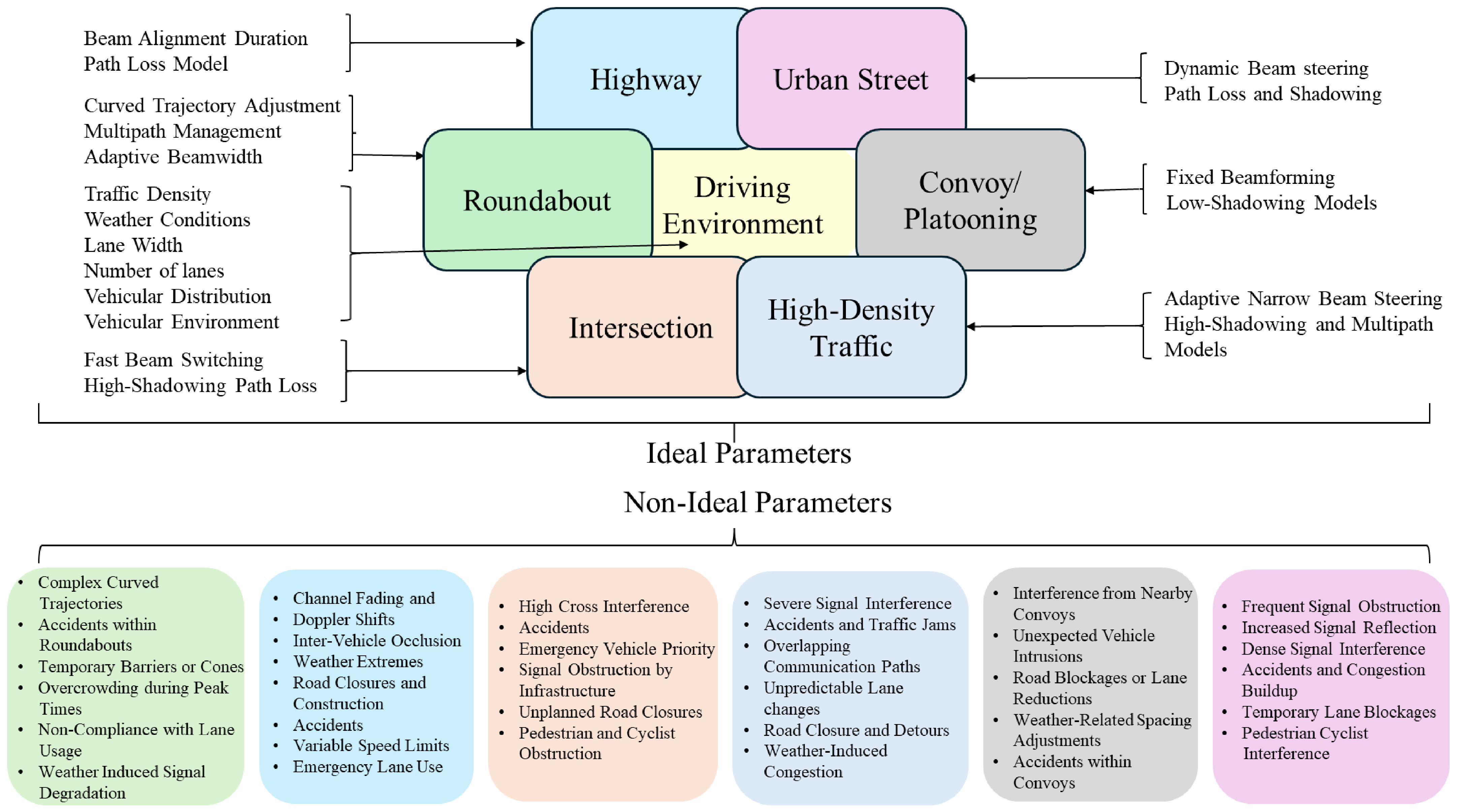
non-ideal scenarios involve conditions where challenges such as high traffic density, multipath interference, Doppler effects, and adverse weather significantly affect operational reliability. These non-ideal conditions are designed to closely simulate real-world environments, where dynamic vehicular interactions and unpredictable factors influence communication effectiveness. By evaluating performance across these contrasting conditions, the proposed framework assesses the adaptability and robustness of interference management techniques, offering valuable insights into real-world applications. To achieve this, the proposed framework incorporates model-specific parameters customized for various driving environments, enabling realistic simulations of V2V communication under both ideal and non-ideal conditions. By examining scenarios such as highways, urban streets, intersections, roundabouts, and convoy formations, the framework supports a comprehensive evaluation of V2V communication performance under a wide range of real-world conditions and operational challenges (see
Figure 4).
The design and evaluation of V2V communication systems depend on understanding how environmental parameters influence system performance under both ideal and non-ideal conditions. Ideal scenarios, such as clear LoS, predictable traffic patterns, and minimal interference, serve as benchmarks for achieving optimal performance and highlight the system’s full potential. Conversely, non-ideal conditions marked by high traffic density, multipath interference, Doppler effects, and adverse weather introduce complexities that closely mirror real-world operational challenges.
Figure 4 presents the model-specific parameters across various road types, contrasting the performance baselines of ideal conditions with the degradations introduced by non-ideal scenarios. This comparison not only illustrates the critical need for robust interference mitigation strategies but also emphasizes the adaptability required for V2V communication frameworks to function effectively in dynamic environments. By addressing these diverse conditions, the proposed framework ensures comprehensive analysis and system optimization across a wide range of realistic vehicular scenarios.
The highway environment, with its high-speed, stable travel, and predictable vehicle paths, offers conditions that support extended beam alignment durations, reducing the need for frequent re-adjustments. This allows the model to leverage a Rician or Two-Ray Ground Reflection path loss model, suited to the clear LoS common in highway scenarios. Moderate traffic density and a uniform vehicle distribution minimize interference risks, enhancing the SINR by providing well-spaced vehicle arrangements. With wider lanes and mild weather conditions, highways provide a baseline for V2V performance under minimal interference [
51]. In non-ideal highway conditions, however, Doppler shifts from high speeds introduce signal fading, while large vehicles can intermittently block signals for smaller vehicles. Severe weather (e.g., fog or snow) can attenuate signals, road closures disrupt predictable routes, and variable speed limits introduce further Doppler effects, requiring adaptive beam adjustments to stabilize the SINR.
Urban streets introduce distinct challenges with high vehicle density and dense infrastructure, where frequent positional adjustments demand dynamic beam steering to maintain alignment amid frequent obstructions [
29,
52,
53]. The Rayleigh path loss and shadowing models capture the multipath interference common in urban settings, where signals reflect off buildings, street furniture, and other structures. With high traffic density, interference management becomes critical to handle signal overlap. Narrower lanes and clustered vehicle distributions reflect urban dynamics, increasing proximity-related interference. Under non-ideal conditions, these challenges intensify, as tall buildings and narrow roads create high NLoS probabilities. Reflective surfaces add multipath interference, and competing signals from cellular and WiFi networks further degrade SINR [
54]. Accidents and pedestrian activity compound these interference sources, requiring continuous adjustments to maintain reliable communication links [
30].
Intersections, with their complex, high-frequency positional changes, require fast beam switching to handle vehicles approaching from multiple directions. Rayleigh high-shadowing models are used here to manage frequent signal obstructions from infrastructure such as traffic lights and poles. Moderate to high traffic density and clustering at intersection points necessitate advanced interference management [
55,
56], with multi-user ZF (Zero-Forcing) and Angle-of-Arrival (AOA) estimation employed to separate signals and sustain SINR. Non-ideal scenarios amplify these challenges, as intersections face cross-interference from converging vehicles and unpredictable stops due to accidents. Emergency vehicle crossings disrupt paths, demanding rapid beam re-alignment, while high pedestrian activity adds dynamic obstacles that interfere with directional stability.
Roundabouts require continuous adjustments to track vehicles along curved paths, necessitating curved trajectory adjustments to maintain alignment. The Rayleigh model or Nakagami model is commonly used to handle multipath interference [
57] in roundabouts, especially in environments where vehicle positions and directions constantly change, and multipath effects dominate. Adaptive beam width, narrowing near entries and widening at exits, ensures stable communication across varying distances. Under non-ideal conditions, frequent directional shifts increase interference, and accidents within the roundabout can obstruct LoS. Temporary barriers and increased congestion intensify multipath effects, while non-compliance with lane usage and adverse weather amplify signal degradation, requiring ongoing recalibration for a stable SINR.
Convoys or platooning scenarios allow fixed beamforming under ideal conditions due to stable, predictable formations. A Rician model or Two-Ray Reflection model, combined with optimized beam width, can provide robust and interference-minimized links in these low-variance environments. In non-ideal settings, interference from adjacent convoys complicates channel allocation, while intrusions by non-convoy vehicles disrupt established beams [
58]. Adverse weather conditions necessitate spacing adjustments, introducing Doppler effects. Accidents within convoys further disrupt communication, requiring quick re-establishment of links.
High-density traffic scenarios, or rush-hour congestion on highways, present some of the most challenging conditions for V2V communication systems. These scenarios are characterized by dense vehicle clusters, frequent positional adjustments, and high levels of inter-vehicle interference. Adaptive narrow beam steering techniques and high-shadowing propagation models become critical to mitigating interference and maintaining robust communication links in these environments. The proposed framework addresses these challenges by implementing real-time interference mitigation strategies, including dynamic spatial filtering and beam adjustment algorithms. In such settings, signals from closely spaced vehicles often overlap, leading to frequent signal collisions. High traffic density also amplifies multipath effects due to reflections from nearby vehicles and infrastructure, significantly degrading the SINR.
Under ideal conditions, narrow beam widths help minimize interference, while real-time adjustments ensure stable communication links even in dense clusters. However, non-ideal conditions, such as accidents, temporary roadblocks, and weather-induced congestion, exacerbate interference levels and complicate beam alignment. These conditions demand rapid recalibration of beamforming techniques and the use of advanced interference management strategies, such as spatial multiplexing and multi-user beamforming, to sustain reliable communication.
Maintaining precise beam alignment across all scenarios depends on accurate positioning of both receiver and interfering vehicles. Positional errors, characterized by deviations in estimated locations, can disrupt alignment, reducing signal strength or increasing interference. These errors lower SINR, especially in high-density environments such as intersections and urban streets. Null steering mitigates interference by placing signal nulls in the direction of interferers. Under ideal conditions, perfect null steering ensures a high SINR by isolating unwanted signals. However, positional errors result in imperfect null steering, allowing residual interference to degrade communication quality. These impacts are particularly pronounced in dynamic, high-density traffic settings, where precise alignment is critical to maintaining reliable V2V communication.
This section underscores the importance of model-specific parameters and adaptive interference management techniques in sustaining high SINR across diverse V2V communication scenarios. By addressing challenges posed by positional inaccuracies, multipath interference, and dynamic vehicular environments, the framework effectively captures the complexities of real-world traffic conditions and provides actionable insights for optimizing V2V system performance.
4. SINR Performance Evaluation in Several Vehicular Use Cases
The evaluation of SINR in vehicular communication systems highlights the capabilities of the proposed framework under both ideal and non-ideal spectral signal processing [
20]. By focusing on realistic V2V dynamics, the simulations were conducted for two distinct traffic scenarios, Case 1 and Case 2, encompassing variations in distance, positional errors, and the number of nulls for interference management. While this work centers on establishing the significance of the framework, future studies will expand on additional scenarios and algorithmic optimizations.
The simulations employed a multi-lane highway model incorporating up to 15 interfering vehicles to replicate real-world V2V environments. LMS beamforming was selected for its ability to dynamically adapt to interference and positional inaccuracies. LMS-based adjustments enable precise beamforming in unpredictable, high-interference vehicular scenarios, aligning well with the objectives of the proposed framework.
Table 2 summarizes the key simulation parameters. The TX and RX configurations used a Uniform Linear Array (ULA) with 16 antenna elements, operating at a carrier frequency of 5.9 GHz and a bandwidth of 10 MHz. Transmit power was set at 24 dBm, and path loss was modeled using a Two-Ray Ground Reflection model, assuming 1.5-m antenna heights and 4 dB shadowing standard deviation. Distances between TX and RX ranged from 10 to 400 m, capturing short- to medium-range V2V communications. Vehicle speeds between 27 and 31.5 m/s are representative of highway and urban speeds [
59].
The evaluation focused on comparing perfect and imperfect null steering methods under varying conditions, with SINR performance analyzed across three dimensions: distance, positional error, and null count. Case 1 modeled a simpler highway scenario with opposing traffic, while Case 2 simulated a high-density urban environment with multi-lane interference.
4.1. SINR vs. Distance Analysis
Figure 5 illustrates SINR trends with increasing distances for Cases 1 and 2 under both null steering configurations. In Case 1, perfect null steering maintained an SINR above 20 dB at short distances (10–50 m), decreasing to 8 dB at 400 m due to path loss and fading. Imperfect null steering showed a steeper decline, starting at 10 dB at 10 m and dropping to −2 dB at 400 m. The SINR gap between perfect and imperfect null steering widened with distance, highlighting residual interference’s impact under imperfect alignment. Case 2, characterized by higher interference density, demonstrated a similar trend. Perfect null steering achieved a 15–20 dB SINR within 50 m but fell to 6 dB at 400 m due to compounded interference. Imperfect null steering struggled to maintain positive SINR at distances exceeding 100 m, emphasizing its limitations in dense environments.
4.2. SINR vs. Positional Error Analysis
Figure 6 shows the SINR’s sensitivity to positional errors. Perfect null steering demonstrated robustness in both cases, with the SINR remaining stable across positional errors up to 3 m. However, imperfect null steering showed significant degradation, particularly in Case 2, where the SINR dropped to −10 dB for positional errors above 5 m. These results underscore the importance of accurate positioning data for maintaining a high SINR in V2V communications. Imperfect null steering’s reliance on precise alignment makes it less suitable for dynamic, high-density scenarios.
4.3. Three-Dimensional SINR Plots: Distance and Null Count Analysis
In the 3D SINR plots (see
Figure 7), Case 1 with perfect null steering (see
Figure 7a) maintains a high SINR (approximately 15 dB) at close distances, showing minimal dependence on null count. As distance increases, the SINR declines steadily, illustrating how path loss limits performance at longer ranges despite increasing nulls. This confirms that distance remains the dominant SINR factor in scenarios with lower interference.
For imperfect null steering in Case 1 (see
Figure 7b), SINR drops more sharply with distance due to residual interference. Additional nulls initially improve SINR at shorter distances (10–15 dB), but as distance grows, SINR falls below 0 dB around 150 m, stabilizing at −10 dB by 400 m, where nulls become ineffective due to dominant path loss.
In Case 2, perfect null steering (see
Figure 7c) handles high interference well at close ranges, sustaining a 10–15 dB SINR within 50 m. However, beyond 150 m, the SINR falls below 0 dB, showing that path loss and compounded interference dominate at extended ranges. Imperfect null steering (see
Figure 7d) follows a similar pattern, with rapid SINR declines beyond 100 m, highlighting limitations in interference management when beamforming is less precise.
4.4. Comparative Analysis: Perfect vs. Imperfect Null Steering
In summary, perfect null steering consistently outperforms imperfect null steering across both cases, particularly at extended distances. In simpler traffic configurations like Case 1, perfect null steering maintains higher SINR stability, achieving effective interference suppression with fewer nulls at close distances. However, imperfect null steering is more sensitive to null count and positional error at short ranges, with some SINR improvement initially from increased nulls, though this benefit fades as distance grows. In complex scenarios such as Case 2, perfect null steering provides robust SINR performance at shorter distances, but additional nulls offer diminishing returns as path loss and interference accumulate.
A key observation across both cases is that at longer distances, SINR remains largely unchanged by positional error, regardless of steering method. At extended ranges, path loss and multipath fading diminish signal strength, reducing the influence of positional inaccuracies. Limited antenna array degrees of freedom also limit additional interference suppression, especially in multi-interference settings like Case 2. Imperfect null steering is constrained by suboptimal beamforming and residual interference, making it less effective in complex environments. Therefore, perfect null steering demonstrates consistent SINR performance with low sensitivity to positional errors, making it advantageous for high-interference scenarios, while imperfect null steering’s dependence on precise positional data limits its suitability in dynamic settings.
5. Conclusions
The proposed V2V framework effectively models diverse vehicular scenarios, serving as a critical tool for capturing real-world dynamics and addressing key performance challenges in null steering methods. By incorporating spatial signal processing and adaptable interference management strategies, the framework demonstrates its versatility in high-interference settings and provides actionable insights for improving V2V communication systems. The simulations validate the robustness of the framework while exposing the limitations of imperfect null steering in managing positional inaccuracies, reinforcing the need for advanced algorithms or hybrid approaches to enhance reliability.
Future research could expand on these findings by incorporating machine learning-driven null steering techniques for real-time adaptation and exploring hybrid positioning systems to mitigate positional errors. Additionally, testing the framework across a wider range of scenarios, including mixed urban–suburban environments, extreme weather conditions (e.g., heavy rain, fog, or snow), and diverse road configurations (e.g., roundabouts, intersections, highways), will enhance its broader applicability. These scenarios will help evaluate the framework’s performance under various ideal and non-ideal conditions, further validating its practical relevance. Furthermore, integrating cross-layer optimization methods and heterogeneous vehicular technologies could enhance the framework’s robustness and SINR stability in real-world conditions. Empirical validations will also be essential to bridge the gap between theoretical models and practical deployments, ensuring the framework’s relevance to next-generation applications.
In conclusion, this study establishes a foundational framework for advancing V2V and V2X communication systems, providing a versatile and realistic simulation platform. The adaptability and precision demonstrated in interference management underscore the framework’s potential to support safety-critical applications in intelligent transportation systems. By addressing both ideal and non-ideal scenarios, this framework paves the way for the development of resilient vehicular communication strategies capable of maintaining high communication quality in complex, dynamic environments.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}