Abstract
Wind energy is one of the most rapidly growing sectors in renewable energy generation, with wind turbines being central to this expansion. Regular maintenance, particularly the inspection of wind turbine blades, is critical to ensure operational efficiency and prevent catastrophic failures. Conventional methods of blade inspection, including ground-based visual inspections, rope-access inspections, and cranes, are time-consuming, expensive, and often hazardous. In recent years, drone-based technologies have emerged as a promising alternative for wind turbine blade inspection. This paper provides a comprehensive review of current drone-based technologies for wind turbine blade inspection, highlighting their advantages, challenges, and future prospects.
Keywords:
wind turbine; blade inspection; non-destructive testing; UAV; drone; structure maintenance 1. Introduction
Wind energy has become a pivotal component of global efforts to transition towards renewable energy sources, driven by the need to mitigate climate change and reduce dependency on fossil fuels. The operational efficiency and reliability of wind turbines are critical for optimizing energy production and ensuring the economic viability of wind farms. A key aspect of maintaining this efficiency is the regular inspection and maintenance of wind turbine blades, which are subject to significant wear and damage over time due to environmental exposure and operational stresses. Traditional inspection methods, such as rope access techniques [1], ground-based telescopic inspections [2], and the use of cranes or elevated work platforms [3,4], have been the standard approaches for many years. However, these methods are not only labor-intensive and costly but also pose significant safety risks to the inspection personnel [5].
In recent years, drone-based technologies have emerged as a game-changing solution for wind turbine blade inspection [6]. Unmanned aerial vehicles (UAVs), commonly referred to as drones, equipped with advanced imaging and sensing technologies, offer a highly efficient, accurate, and safe alternative to traditional inspection methods [7,8,9]. Drones can be rapidly deployed to conduct detailed inspections, capturing high-resolution images and sensor data that can be used to identify and analyze defects such as cracks, erosion, and surface wear [10,11,12]. These capabilities significantly reduce the need for manual inspections, thereby minimizing safety risks, reducing downtime, and lowering operational costs. While human-based inspections are still in use, especially for repairs or situations requiring direct intervention, drones are increasingly taking over routine inspections due to their efficiency and safety. Unmanned aerial vehicles designed for wind turbine blade inspections differ significantly from regular consumer or commercial drones due to their specialized capabilities, tailored to address the challenges of inspecting large, complex structures often located in remote or windy environments. These UAVs feature robust frames and aerodynamic designs to withstand harsh conditions, extended flight endurance enabled by larger batteries or hybrid power systems, and advanced navigation systems such as precision GPS and obstacle avoidance technologies. Unlike regular drones, inspection UAVs have greater payload capacities to accommodate specialized equipment, including high-resolution cameras, thermal imaging sensors, LiDAR (light detecting and ranging) systems, ultrasonic testing tools, and onboard data processing units. These enhancements make inspection UAVs indispensable for safe, efficient, and accurate assessments of wind turbine blades.
This review paper aims to provide an overview of the current state of drone-based technologies for wind turbine blade inspection. It begins by examining the different types of drones used in the industry, including multirotor, fixed-wing, and hybrid UAVs, and discusses the advantages and limitations of each type [13,14,15]. The paper then explores the various sensors and imaging technologies employed in drone inspections, including cameras, thermal imaging devices, and light detecting and ranging (LiDAR), ultrasonic and acoustic emission. These sensors are crucial for capturing detailed data on blade conditions, enabling precise defect detection and assessment. While the use of camera-based techniques for wind turbine blade inspection has been extensively researched and widely adopted, ultrasonic and acoustic emission (AE) techniques remain relatively less explored in the context of drone-based inspections. These methods, though highly effective in detecting subsurface and internal defects, have not yet achieved the same level of prominence as visual or thermal imaging approaches. Ultrasonic techniques involve the use of high-frequency sound waves to identify internal defects such as delaminations, voids, and cracks within the composite structure of wind turbine blades. By analyzing the reflections or transmissions of these waves, inspectors can detect irregularities that are otherwise invisible on the surface. Acoustic emission, on the other hand, passively detects stress waves emitted by materials under mechanical stress, allowing for real-time monitoring of dynamic events such as crack propagation or fiber breakage. These techniques are particularly suited for assessing the structural integrity of blades and ensuring long-term operational safety.
The paper concludes with a comprehensive discussion on the challenges and limitations associated with using drones for wind turbine blade inspection. While drones have revolutionized inspection practices by offering safer, faster, and more cost-effective alternatives to traditional methods, their deployment is not without obstacles. Environmental factors, such as strong winds, rain, and extreme temperatures, can significantly affect drone stability and the accuracy of data collection, particularly in offshore locations or at high altitudes. Payload limitations pose another challenge, as advanced inspection techniques like LiDAR, ultrasonic testing, and acoustic emission require specialized sensors that add weight and complexity, often impacting flight time and maneuverability. Additionally, drones rely on battery power, which limits their operational range and necessitates frequent recharging or battery replacements, especially when inspecting large turbine blades that demand extended flight durations. Data processing and interpretation further complicate drone-based inspections; while advanced techniques generate high volumes of data, analyzing and extracting meaningful insights often require sophisticated algorithms and skilled personnel, increasing operational costs. By addressing these limitations and exploring potential advancements in drone technology, sensor integration, and operational strategies, the paper underscores the importance of continued innovation to fully realize the potential of drones in ensuring the reliability and efficiency of wind energy systems. This work starts by discussing different drone types in Section 2 and path planning for inspection in Section 3. Section 4 focuses on the imaging and sensing technologies employed in drone-based inspections, including camera-based methods, thermal imaging, and LiDAR. Section 5 reviews ultrasonic and acoustic emission techniques and Section 6 discusses challenges and limitations for turbine blade inspection using UAVs.
2. Different Drone Types
In the field of wind turbine blade inspection, the choice of drone type is crucial, as different drone designs offer varying capabilities in terms of maneuverability, stability, endurance, and resistance to environmental conditions. Drones used for turbine inspection are typically divided into three main types: multirotor drones, fixed-wing drones, and hybrid VTOL (Vertical Take-Off and Landing) drones. Each of these types provides unique advantages and faces specific challenges when used for blade inspection. Figure 1 summarizes these drone types [16].
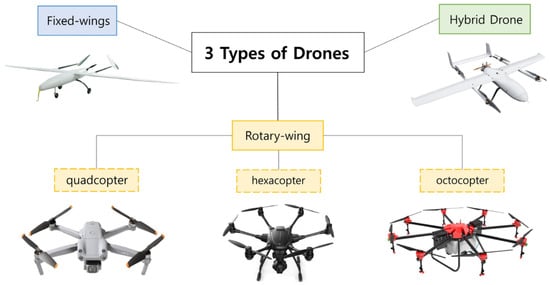
Figure 1.
Summary of drone types [16].
Multirotor drones are the most commonly employed type for close-up wind turbine inspections, largely because of their high degree of control and stability in close-range flight [17,18,19,20]. They include designs such as quadcopters (four rotors), hexacopters (six rotors), and octocopters (eight rotors), with each configuration offering slightly different levels of stability and power [21,22,23]. Multirotors can hover in place and move in precise patterns, which is ideal for capturing detailed, high-resolution images of turbine blades from multiple angles. The ability to hover is critical when inspecting various sections of the blade, including areas that are difficult to access, such as blade tips or the underside of the structure. However, a key limitation of multirotor drones is their relatively short battery life, which typically restricts flight times to 20–30 min [24]. Additionally, their exposed rotor design can make them vulnerable to strong wind, a common condition in wind farm locations, which can impact their stability and maneuverability during inspection flights [25].
Fixed-wing drones are designed to mimic the structure of traditional aircraft, featuring wings that provide lift through forward motion, making them highly efficient for covering large distances. Unlike multirotors, fixed-wing drones are not capable of hovering and they must maintain a forward trajectory to stay aloft. This design is beneficial for applications requiring extended flight times and greater coverage, such as surveying expansive wind farm areas, assessing terrain, or conducting initial evaluations of the surrounding environment [26,27,28]. Fixed-wing drones can generally remain airborne for over an hour and are better equipped for inspections over long distances or in areas with numerous turbines. However, they are not ideally suited for detailed blade inspections, as they lack the ability to closely approach and hover near individual turbines. Moreover, fixed-wing drones require more space for takeoff and landing and are less adaptable to confined or obstacle-rich areas, which can make their deployment in complex or densely packed wind farms more challenging.
Hybrid VTOL (Vertical Take-Off and Landing) drones represent a combination of multirotor and fixed-wing designs, integrating the ability to hover with the endurance of a fixed-wing structure [29,30]. These drones take off and land vertically like multirotors, but once airborne, they can transition into fixed-wing mode for efficient, sustained flight. This hybrid capability is particularly advantageous in wind turbine blade inspection, as VTOL drones can switch between hovering near blades for close-up inspection and covering large areas in fixed-wing mode. VTOL drones are versatile and adaptable, able to handle detailed inspections around individual turbines as well as broader surveying tasks. Despite their benefits, hybrid VTOL drones are more complex to manufacture and operate, which contributes to higher costs and more intensive maintenance requirements. Additionally, the transition between hover and forward flight can be affected by wind conditions, which is an operational consideration in windy environments typical of wind farms.
In summary, multirotor drones are generally favored for their agility and maneuverability, allowing for detailed inspections of wind turbine blades from various angles. However, their limited flight endurance may necessitate frequent battery changes, making them more suitable for smaller-scale inspections or close-proximity tasks. Fixed-wing drones, while not designed for close-up inspection, offer extended flight times and are well suited for large-scale surveying and monitoring. Hybrid VTOL drones combine the strengths of both multirotors and fixed-wing types, providing a versatile solution for wind turbine inspection where both detailed blade analysis and broader area coverage are necessary. The selection of drone type ultimately depends on the specific requirements of the inspection task, including flight endurance, inspection detail, and environmental adaptability, all of which are critical to achieving accurate, reliable, and efficient turbine blade assessments in varying operational contexts.
3. Drone Path Planning for Inspection
Path planning is a critical aspect of drone-based wind turbine blade inspections, directly influencing both the efficiency and effectiveness of the process [31,32,33,34,35,36,37,38]. At its core, path planning involves defining an optimal flight trajectory to ensure comprehensive coverage of turbine blades while adhering to a range of operational constraints. These constraints include energy consumption, collision avoidance, inspection precision, and data quality. Effective path planning ensures that drones collect the high-resolution imagery and sensor data required for identifying potential defects or damage on the turbine blades while operating within energy and time limitations. Key objectives of path planning encompass maximizing inspection coverage, minimizing power usage, and ensuring smooth operation around the turbine structure. In practical applications, path planning strategies often begin with pre-defined or offline approaches. These methods utilize turbine specifications, such as blade geometry and dimensions, to design systematic flight paths. For example, waypoints are strategically placed along the blade to guide the drone, enabling consistent and thorough scanning. Advanced methods integrate 3D turbine models to simulate inspection scenarios and optimize flight paths before actual deployment, providing precise and adaptable solutions tailored to specific turbines.
Innovative approaches have emerged to enhance path planning further. Rodriguez et al. [31], for instance, developed a cost-effective, autonomous drone system powered by computer vision algorithms, relying on real-time camera feedback for both operation and analysis. In their study, optimization techniques significantly reduced the drone’s energy consumption during inspection. As illustrated in Figure 2, the energy required for inspecting seven targets was reduced from 4121 to 2332 units after optimizing the initial flight path. This example underscores the importance of incorporating dynamic optimization strategies into path planning to improve both performance and resource efficiency. These advancements highlight the importance of continuously refining path planning techniques, especially as wind turbines become more complex and demand higher levels of inspection accuracy and efficiency.
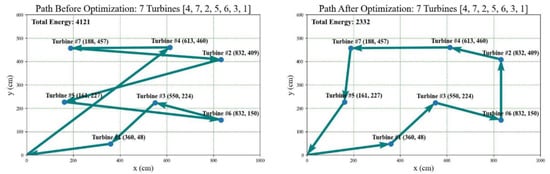
Figure 2.
Example of heuristic simulated annealing for 7 targets [31].
In contrast, adaptive path planning methods have gained prominence for their ability to respond to dynamic conditions during inspections. These techniques use real-time feedback from sensors, such as cameras or LiDAR, to adjust the drone’s flight path on the fly. For example, reactive planning enables drones to avoid unexpected obstacles, while AI-driven algorithms optimize the inspection path based on real-time data or insights from prior inspections. Such adaptability is particularly valuable in dealing with the aerodynamic complexity of turbine blades and the variability of environmental conditions, such as wind gusts or sudden changes in weather. Emerging technologies are significantly enhancing the capabilities of drone path planning for wind turbine inspections. Simultaneous Localization and Mapping (SLAM) techniques allow drones to create real-time maps of the blade and navigate dynamically within those environments [39,40]. Integration with digital twin models enables drones to refine their paths based on live data and accurate virtual representations of the turbine. Furthermore, the use of multi-drone systems can improve efficiency by enabling simultaneous inspection of different parts of the turbine, thereby reducing overall inspection time. These advancements demonstrate the potential of intelligent path planning systems to transform wind turbine blade inspections, making them more efficient, reliable, and adaptable to complex operational demands.
4. Commonly Used Turbine Blade Inspection Sensing Technologies for Drones
4.1. High-Resolution Cameras
High-resolution optical cameras are indispensable tools for drone-based wind turbine blade inspections, offering exceptional detail and accuracy necessary for identifying and assessing various forms of damage and wear [41,42,43,44,45]. High resolution allows inspectors to detect minute defects that might be missed by lower-resolution equipment, providing a comprehensive view of the blade’s condition. The lenses used in high-resolution optical cameras are equally important, designed to complement the capabilities of the sensors. These lenses often incorporate aspherical elements and low-dispersion glass to minimize optical aberrations and distortions. The result is sharp, true-to-life images that accurately reflect the blade’s condition. High-quality optics ensure that the fine details captured by the sensor are preserved, which is crucial for effective inspection and analysis. Popular models include the Sony Alpha series (e.g., Sony Alpha 7R IV) for their high resolution and clarity, and the DJI Zenmuse Z30 for its powerful zoom capabilities, which help inspect fine details such as cracks, erosion, or surface defects.
Image processing plays a significant role in the performance of high-resolution optical cameras. Advanced algorithms for noise reduction, high dynamic range (HDR) imaging, and image stabilization are used to enhance the clarity and quality of the captured images. These processes can be carried out on the camera itself or on a connected computing device, enabling real-time enhancement and analysis. This capability is particularly important when inspecting turbine blades in challenging lighting conditions or when the drone is in motion. Regarding image processing, Shihavuddin et al. [41] proposed a deep learning-based automated damage suggestion system for subsequent analysis of drone inspection images. Shown in Figure 3 are the results for the study with the deep learning-based automated damage suggestion system with over 80% accuracy. Figure 3a,d,f depict proposed lighting receptors, while Figure 3b,h highlight suggestions for leading-edge (LE) erosion. Figure 3c,e present recommendations for vortex generator (VG) panels, distinguishing between those with intact teeth and those with missing teeth. The latter represents a particularly challenging scenario for automated damage detection methods. Lastly, Figure 3g provides an example where no damage is identified.
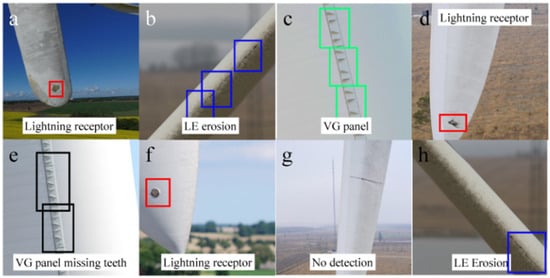
Figure 3.
Suggestion results on the test images for the trained model [31].
Corrosion detection is another critical application, especially for offshore wind turbines that are exposed to saline environments [46,47,48,49,50]. Corrosion is a significant challenge that can affect the durability, performance, and reliability of drones used for wind turbine blade inspection. Operating in harsh environmental conditions, such as offshore or coastal regions, exposes drones to high levels of humidity, salt spray, and other corrosive elements. These factors can degrade various components of the drone, including its structural materials, electronic systems, and sensors, potentially compromising inspection accuracy and flight safety. This section explores the causes, effects, and mitigation strategies related to corrosion in drone systems. The primary causes of corrosion in drones stem from their exposure to environmental factors. Offshore wind farms, in particular, present conditions that are highly conducive to corrosion due to the presence of salt-laden air, frequent rainfall, and temperature fluctuations. Saltwater environments are particularly aggressive, as salt particles can penetrate joints and surfaces, accelerating oxidation and material degradation. In addition, ultraviolet radiation from prolonged sunlight exposure can exacerbate wear on protective coatings, making the drone’s components more vulnerable to corrosive agents [51,52,53].
4.2. Thermal Imaging
Thermal imaging has emerged as a vital tool in drone-based wind turbine blade inspection, providing unique capabilities for detecting subsurface defects and thermal anomalies that may not be visible through conventional imaging methods [54,55]. By capturing variations in infrared radiation emitted by the blades, thermal imaging techniques enable the identification of structural flaws, delaminations, moisture ingress, and other issues that can compromise blade performance and longevity. Thermal imaging relies on the principle that different materials emit infrared radiation based on their temperature and thermal properties. When drones equipped with thermal cameras inspect wind turbine blades, the cameras capture temperature variations that may indicate underlying issues. For instance, areas with structural delaminations or trapped moisture often exhibit thermal anomalies due to differences in heat transfer rates compared to intact regions [56,57]. These anomalies are visualized as temperature gradients on thermal images, providing inspectors with critical insights into the blade’s condition. One of the key advantages of thermal imaging is its ability to perform non-destructive inspection over large surface areas in a relatively short time. This is particularly valuable for wind turbine blades, which are large and complex in geometry. Drones can navigate close to the blade surfaces and capture high-resolution thermal data from multiple angles, ensuring comprehensive coverage. Moreover, thermal imaging is effective both during daylight and at night, making it versatile for inspections under various conditions [58,59,60,61].
Thermal imaging is often used in conjunction with active or passive techniques [62,63]. Passive thermal imaging leverages natural temperature differences caused by environmental conditions, such as sunlight heating the blades, to reveal anomalies [64,65,66]. In contrast, active thermal imaging involves the application of external heat sources, such as infrared lamps, to induce temperature changes that highlight defects more prominently [67,68,69,70]. The choice between these methods depends on inspection requirements, environmental conditions, and the specific defects being targeted. For example, Sanati et al. [62] conducted a passive thermography experiment, as shown in Figure 4, where the suction side of the blade was monitored outdoors during a sunny day from morning until the afternoon. Here, a T1030SC IR camera was used with a 21.2 mm lens, resulting in a spatial resolution of 4 mm per pixel to record thermograms at a frequency of 1 Hz. With the Fast Fourier Transform (FFT) applied to the passive thermograms obtained from the experiment, the results are shown in Figure 5. In Figure 5a, phase images have significantly enhanced the visibility of shear web features, highlighted by red arrows, where Figure 5b shows that the amplitude images considerably increased the quality and visibility of defects, such as cracks and delamination, shown in white boxes (thermal anomalies that indicate potential cracking or delamination within the structure).
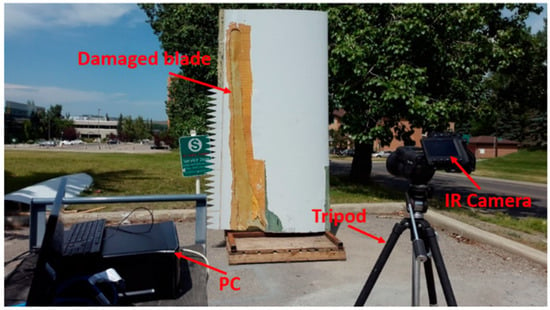
Figure 4.
Passive thermography experiment setup for a blade [62].
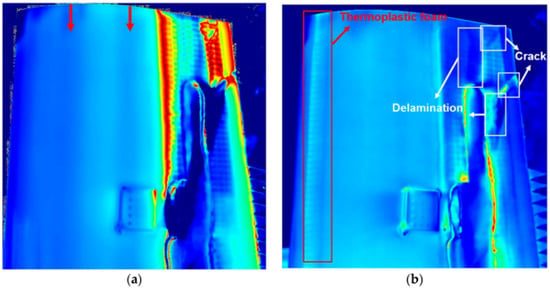
Figure 5.
(a) Phase images of the passive thermograms at 0.00184 Hz and (b) amplitude image of the passive thermograms at 0.0165 Hz [62].
Furthermore, recent advancements in thermal imaging technology have further enhanced its applicability in drone-based inspections. High-resolution thermal cameras with greater sensitivity enable the detection of smaller anomalies with improved accuracy. Integration with artificial intelligence (AI) and machine learning algorithms allows for automated analysis of thermal images, reducing the reliance on manual interpretation and improving efficiency [71,72,73,74].
4.3. LiDAR (Light Detection and Ranging)
LiDAR (Light Detection and Ranging) technology has emerged as a transformative tool for drone-based wind turbine blade inspections, offering unparalleled precision in mapping and analyzing the structural integrity of turbine blades. This remote sensing technology uses laser pulses to generate detailed three-dimensional (3D) models of objects, making it particularly effective for assessing structures for maintenance [75,76,77,78]. Some commonly used systems include the Velodyne Puck and RIEGL miniVUX series, which help assess blade deformation, twist, or other structural anomalies. LiDAR operates by emitting laser pulses towards an object and measuring the time it takes for the pulses to reflect back to the sensor. This time-of-flight measurement allows for the calculation of distances with high accuracy, creating a dense point cloud that represents the surface of the object. When used in turbine blade inspections, LiDAR provides a comprehensive 3D map of the blade surface, capturing even the smallest details and irregularities.
One of the primary applications of LiDAR in turbine blade inspections is 3D mapping. The detailed 3D models generated by LiDAR can reveal the precise shape and contour of the blades, allowing inspectors to identify deformations, misalignments, and other geometric anomalies [79,80,81,82,83]. These models are essential for understanding how the blades interact with wind forces and for optimizing their aerodynamic performance. Any deviations from the intended blade geometry can be detected early, enabling corrective actions to be taken before they impact the turbine’s efficiency and lifespan. LiDAR is also highly effective in detecting structural defects such as cracks, delaminations, and voids. These defects can alter the blade’s surface profile and are readily identifiable in the high-resolution 3D point clouds produced by LiDAR. For instance, a crack might appear as a discontinuity in the surface model, while delaminations and voids can create depressions or irregularities. By analyzing these features, inspectors can assess the severity and extent of the defects and plan appropriate maintenance or repairs. In [79], Oliveira et al. examined the use of UAVs for the inspection and maintenance of offshore wind turbines, presenting a novel approach to autonomous wind turbine inspection along with a simulation framework for developing and evaluating inspection techniques in realistic offshore conditions. Unlike traditional methods that depend on visual data to identify wind turbine components during inspection, this approach utilizes a three-dimensional LiDAR system to determine the turbine’s pose. Figure 6 shows the authors’ work, where the UAV extracts the centroid of the point cloud data, approximates to a tangential plane and calculates its covariance eigenvectors to obtain the heading adjustment for the blade.

Figure 6.
Blade close inspection procedure after obtaining wind turbine model estimation [79].
Another significant advantage of LiDAR is its ability to measure erosion and material loss with high precision [84,85,86,87]. Wind turbine blades are constantly subjected to environmental factors such as wind, rain, and debris, which can cause surface erosion over time. LiDAR’s precise measurements enable the quantification of material loss, helping maintenance teams to track erosion rates and predict when blade repairs or replacements will be necessary. This capability is crucial for maintaining the structural integrity and performance of the blades, especially in harsh operating environments.
The location and timing of data post-processing in drone-based wind turbine inspections depend largely on the specific equipment and systems employed. Real-time data processing is increasingly feasible due to advancements in onboard computing power, with drones equipped with processors like Nvidia Jetson modules capable of handling tasks such as defect detection or preliminary image analysis during flight. This enables immediate identification of critical issues, allowing for prompt responses. However, more complex data, such as 3D models generated from LiDAR or detailed thermographic analyses, often require post-processing in dedicated data centers, where advanced algorithms can be applied to extract deeper insights. The availability of data varies accordingly. Real-time processed data can be accessed almost immediately during or shortly after the flight, while data requiring extensive post-processing may take hours to days to deliver, depending on the complexity and volume of information. Balancing these approaches ensures timely detection of urgent issues while maintaining the accuracy and comprehensiveness of the analysis.
5. Ultrasonic and Acoustic Emission Techniques in Drone-Based Wind Turbine Blade Inspection
While camera-based drone inspection techniques have been extensively researched and widely adopted for wind turbine blade inspection, ultrasonic and acoustic emission (AE) techniques remain comparatively underexplored. Despite their less frequent application, these methods offer unique advantages for detecting subsurface and internal defects, making them valuable complements to visual and thermal imaging in non-destructive evaluation (NDE). By utilizing high-frequency sound waves and stress wave detection, ultrasonic and AE techniques enable the identification of critical issues such as delaminations, corrosions, cracks, voids, and adhesive bond failures that are not detectable through surface-level imaging.
Ultrasonic testing (UT) involves actively transmitting high-frequency sound waves into the blade structure and analyzing the reflected or transmitted signals to identify internal irregularities. This technique is particularly effective for composite materials commonly used in turbine blades, where subsurface defects can compromise structural integrity. Drone-based UT can employ contact methods which use transducers that require direct contact with the blade surface, often facilitated by a coupling medium like water or gel and implemented through robotic arms or specialized fixtures [88,89,90,91]. Mattar and Kalai [88] created a wall-sticking aerial robot platform capable of flying to and attaching itself to any location on a structure, as shown in Figure 7. The UAV incorporates electromagnetic holding mechanisms that secure the sensor probe to the surface of the target area. It restrains a fixed extension arm that extends far from the neighboring blades with a mounting plate that contains compact and lightweight articulating flexible coils. In addition, the front rotor guards, constructed from carbon fiber, are designed to prevent contact with the wall. The ultrasonic probe performs measurements by pressing against a surface and remains stationary for 1 to 2 s to capture the data.
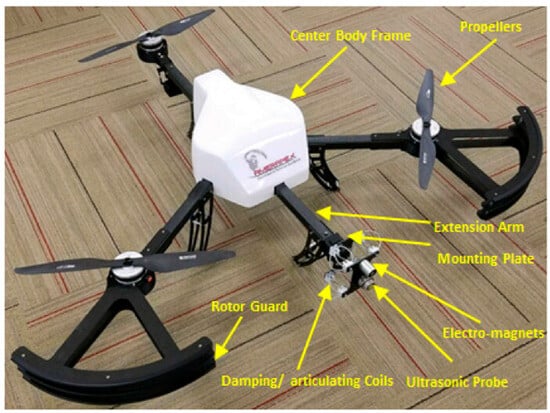
Figure 7.
Wall sticking drone and its components [88].
Acoustic emission, in contrast, is a passive technique that detects stress waves emitted by the material itself during deformation or damage events. AE excels in monitoring dynamic issues, such as crack propagation or delaminations, as they occur in real-time [92,93,94,95,96,97]. For drone-based applications, AE sensors can be integrated into the drone system or strategically positioned on the turbine blade to capture stress wave activity. This capability makes AE particularly suited for assessing active damage mechanisms and evaluating the progression of structural issues. The noise generated by multirotor drones, including both mechanical and aerodynamic components, can pose challenges when measuring wind turbine noise. This interference can obscure subtle acoustic signals critical for detecting structural damage or aerodynamic inefficiencies in the turbine blades. To address this, specialized UAVs for acoustic assessments are often equipped with directional microphones and advanced noise cancellation algorithms to filter out drone-generated noise. Although these techniques provide unique insights into the internal health of wind turbine blades, they have not been as thoroughly studied or implemented as camera-based inspection methods. This discrepancy is likely due to the practical challenges associated with integrating ultrasonic and AE systems into drones, such as maintaining precise sensor positioning, achieving consistent contact for UT, and managing the complexity of interpreting ultrasonic and AE data in real time. Additionally, environmental factors, such as wind and background noise, can interfere with the effectiveness of these methods [98,99].
Table 1 provides a comparative analysis of the key drone-based inspection methods for wind turbine blades discussed up to this section. It highlights the types of defects each method can detect, their advantages, limitations, costs, and current levels of adoption. While camera-based methods are widely used for detecting surface defects due to their simplicity and cost-effectiveness, advanced techniques like thermal imaging and LiDAR offer enhanced capabilities for detecting subsurface damage and structural deformations. Ultrasonic and acoustic emission methods, though highly effective for internal defect detection and real-time monitoring, face challenges in integration and broader adoption due to their complexity and operational constraints.

Table 1.
Comparative analysis of drone-based inspection techniques for wind turbine blades.
6. Challenges and Limitations
Despite the growing adoption of drones for wind turbine inspection, their deployment comes with a range of challenges and limitations that can impact their efficiency and effectiveness. These challenges are particularly evident when implementing advanced inspection techniques, such as camera-based, ultrasonic, and LiDAR systems. Understanding these limitations is critical for optimizing drone performance and ensuring reliable inspection outcomes. One significant challenge lies in the environmental conditions in which drones operate [100,101,102]. Wind turbines are often located in remote, offshore, or high-altitude areas, where strong winds, turbulence, rain, and fluctuating temperatures are common. These conditions can destabilize drones, reducing their ability to maintain precise positioning during inspection tasks. Techniques like ultrasonic testing, which often require direct contact with the blade surface, are particularly vulnerable to such instability, as maintaining consistent contact becomes difficult in windy conditions. Similarly, camera and LiDAR systems may suffer from reduced data quality due to vibrations or environmental interference, such as water droplets on lenses or laser scattering in heavy fog.
Another limitation is the operational range and battery life of drones [103,104,105]. Wind turbine inspections typically require covering large structures, including blades that can exceed 80 m in length. Extended flight times are needed for comprehensive inspections, but drones are constrained by limited battery capacities, especially when carrying heavy payloads such as ultrasonic probes or high-resolution cameras. Frequent battery replacements or recharging can increase inspection times and reduce overall efficiency. Payload integration is another technical hurdle [106,107]. Advanced inspection techniques like LiDAR and ultrasonic testing often require specialized equipment that adds weight and complexity to the drone system. Integrating these sensors while maintaining the drone’s aerodynamic stability and performance can be challenging. For example, ultrasonic probes may require robotic arms or contact mechanisms, which can strain the drone’s motors and reduce flight time. Similarly, high-precision LiDAR systems demand stable platforms and advanced vibration isolation to capture accurate data, adding further design complexity. Data processing and interpretation also pose significant challenges. Techniques such as LiDAR and ultrasonic testing generate large volumes of data that require extensive analysis to identify defects or irregularities accurately. Processing these data often demands advanced software and skilled personnel, which can increase operational costs. Moreover, interpreting data from ultrasonic or LiDAR systems can be complex, requiring calibration and expertise to account for material properties, environmental conditions, and blade geometry. The durability and maintenance of drones also remain critical concerns. Repeated exposure to harsh environments, including salt spray in offshore locations or UV radiation, can lead to corrosion and material degradation, impacting drone reliability over time. Sensors and probes used in ultrasonic and LiDAR inspections are particularly susceptible to wear and damage, necessitating regular maintenance and calibration to ensure accuracy.
Lastly, the integration of data gathered by drones with satellite data can present a promising approach to enhancing wind turbine inspection and maintenance processes. Drones excel in capturing high-resolution, localized data on blade conditions, including surface defects, thermal anomalies, and structural deformations. On the other hand, satellite data provide a broader perspective, offering insights into environmental conditions such as wind patterns, weather forecasts, and long-term site analytics. Combining these data sources can create a synergistic system, where satellite data inform drone deployment by identifying regions requiring detailed inspection or predicting maintenance schedules. Moreover, satellite imagery can be used to monitor larger wind farms or remote areas where drone coverage may be limited, while drones can validate and complement satellite findings with precise, ground-level measurements. Such a hybrid approach could improve decision making, optimize inspection schedules, and enhance overall wind farm efficiency. Furthermore, in addition to the parameters discussed in this review, future studies could benefit from incorporating a broader range of factors to provide a more comprehensive comparison of drone-based technologies for wind turbine blade inspection. Parameters such as cost-effectiveness, environmental adaptability, and long-term reliability are crucial for evaluating the practical viability of these technologies in diverse operational contexts. Moreover, factors like scalability, ease of implementation, data processing requirements, and compatibility with various turbine materials are increasingly relevant as drone-based inspections are scaled across different wind farm settings and blade designs. While this paper focuses on the core aspects of drone types, path planning, and sensing technologies, these additional dimensions represent promising areas for further exploration and could significantly enhance the depth and applicability of future reviews.
7. Conclusions
Drone-based technologies have brought transformative advancements to wind turbine blade inspection, offering a safer, faster, and more cost-effective alternative to traditional methods. This review has briefly explored different drone types (multirotor, fixed-wing, and hybrid designs) and highlighted the importance of path planning algorithms and autonomous navigation systems in optimizing inspection efficiency and reliability. Sensors such as high-resolution cameras, thermal imaging devices, and LiDAR are widely used for surface and subsurface defect detection, while emerging techniques like ultrasonic and acoustic emission show significant potential for identifying internal damage and assessing material integrity, further broadening inspection capabilities. Despite these advancements, challenges remain. Environmental factors, such as high winds and turbulence, can affect drone stability and data accuracy, especially in offshore settings. High costs associated with sophisticated drones and sensors, as well as payload and power constraints, limit their accessibility for smaller operators. Regulatory frameworks governing drone use are still maturing, presenting additional barriers to widespread adoption. Addressing these challenges will require further innovation in drone platforms, sensor integration, and operational strategies, alongside the development of standardized regulations and robust safety protocols. Looking ahead, advancements in lightweight materials, improved battery technology, and artificial intelligence-driven data analysis are expected to overcome many of these limitations. Future research should focus on integrating multiple sensing modalities, enhancing autonomous capabilities, and developing drones capable of operating reliably in harsh environmental conditions.
In conclusion, drone-based technologies have redefined wind turbine blade inspection by providing unparalleled efficiency, precision, and safety. While challenges persist, ongoing innovation and collaboration between industry and research communities are likely to accelerate the adoption of these technologies. Drones are poised to play a critical role in ensuring the sustainability, reliability, and efficiency of wind energy systems, making them an integral component of the global transition to renewable energy.
Author Contributions
W.S.N. was responsible for conceptualization and methodology of the work; S.-J.H. carried out investigation, conducted experiments and participated in writing the manuscript by analyzing data. All authors have read and agreed to the published version of the manuscript.
Funding
This study was supported by the Research Programs funded by SeoulTech (Seoul National University of Science and Technology).
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Marsh, G. Meeting the challenge of wind turbine blade repair. Reinf. Plast. 2011, 55, 32–36. [Google Scholar] [CrossRef]
- Carnero, A.; Martín, C.; Díaz, M. Portable motorized telescope system for wind turbine blades damage detection. Eng. Rep. 2023, e12618. [Google Scholar] [CrossRef]
- Zhao, Y.; Cheng, Z.; Sandvik, P.C.; Gao, Z.; Moan, T.; Van Buren, E. Numerical modeling and analysis of the dynamic motion response of an offshore wind turbine blade during installation by a jack-up crane vessel. Ocean Eng. 2018, 165, 353–364. [Google Scholar] [CrossRef]
- Kumar, P.; Saravanan, R.; Bharathiraja, R.; Rathnasabapathy, C.S. Risk management of work at height in higher-capacity wind turbines. J. Namib. Stud. 2023, 35, 3815–3839. [Google Scholar]
- Jin, X.; Gan, Y.; Ju, W.; Yang, X.; Han, H. Research on wind turbine safety analysis: Failure analysis, reliability analysis, and risk assessment. Environ. Prog. Sustain. Energy 2016, 35, 1848–1861. [Google Scholar] [CrossRef]
- Memari, M.; Shakya, P.; Shekaramiz, M.; Seibi, A.C.; Masoum, M.A. Review on the advancements in wind turbine blade inspection: Integrating drone and deep learning technologies for enhanced defect detection. IEEE Access 2024, 12, 33236–33282. [Google Scholar] [CrossRef]
- Kulsinskas, A.; Durdevic, P.; Ortiz-Arroyo, D. Internal wind turbine blade inspections using UAVs: Analysis and design issues. Energies 2021, 14, 294. [Google Scholar] [CrossRef]
- Iyer, A.; Nguyen, L.; Khushu, S. Learning to identify cracks on wind turbine blade surfaces using drone-based inspection images. arXiv 2022, arXiv:2207.11186. [Google Scholar]
- Yang, C.; Liu, X.; Zhou, H.; Ke, Y.; See, J. Towards accurate image stitching for drone-based wind turbine blade inspection. Renew. Energy 2023, 203, 267–279. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Z. Automatic detection of wind turbine blade surface cracks based on UAV-taken images. IEEE Trans. Ind. Electron. 2017, 64, 7293–7303. [Google Scholar] [CrossRef]
- Dhiman, H.S.; Nizami, T.K. Wind turbine blade erosion detection using visual inspection and transfer learning. In Proceedings of the 2024 International Conference on Control, Automation and Diagnosis (ICCAD), Paris, France, 15–17 May 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–6. [Google Scholar]
- Xu, D.; Wen, C.; Liu, J. Wind turbine blade surface inspection based on deep learning and UAV-taken images. J. Renew. Sustain. Energy 2019, 11, 053305. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Dileep, M.R.; Navaneeth, A.V.; Ullagaddi, S.; Danti, A. A study and analysis on various types of agricultural drones and its applications. In Proceedings of the 2020 Fifth International Conference on Research in Computational Intelligence and Communication Networks (ICRCICN), Bangalore, India, 26–27 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 181–185. [Google Scholar]
- Vergouw, B.; Nagel, H.; Bondt, G.; Custers, B. Drone technology: Types, payloads, applications, frequency spectrum issues and future developments. In The Future of Drone Use: Opportunities and Threats from Ethical and Legal Perspectives; T.M.C. Asser Press: The Hague, The Netherlands, 2016; pp. 21–45. [Google Scholar]
- Choi, H.W.; Kim, H.J.; Kim, S.K.; Na, W.S. An overview of drone applications in the construction industry. Drones 2023, 7, 515. [Google Scholar] [CrossRef]
- Zhang, K.; Pakrashi, V.; Murphy, J.; Hao, G. Inspection of floating offshore wind turbines using multi-rotor unmanned aerial vehicles: Literature review and trends. Sensors 2024, 24, 911. [Google Scholar] [CrossRef]
- Schafer, B.E.; Picchi, D.; Engelhardt, T.; Abel, D. Multicopter unmanned aerial vehicle for automated inspection of wind turbines. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 244–249. [Google Scholar]
- Shafiee, M.; Zhou, Z.; Mei, L.; Dinmohammadi, F.; Karama, J.; Flynn, D. Unmanned aerial drones for inspection of offshore wind turbines: A mission-critical failure analysis. Robotics 2021, 10, 26. [Google Scholar] [CrossRef]
- Stokkeland, M. A Computer Vision Approach for Autonomous Wind Turbine Inspection Using a Multicopter. Master’s Thesis, Department of Engineering Cybernetics, Norwegian University of Science and Technology, Trondheim, Norway, 2014. [Google Scholar]
- Nvss, S.; Esakki, B.; Yang, L.J.; Udayagiri, C.; Vepa, K.S. Design and Development of Unibody Quadcopter Structure Using Optimization and Additive Manufacturing Techniques. Designs 2022, 6, 8. [Google Scholar] [CrossRef]
- Lei, Y.; Ji, Y.; Wang, C.; Bai, Y.; Xu, Z. Full-scale measurement on the aerodynamics of nonplanar rotor pairs in a hexacopter. J. Mech. Robot. 2017, 9, 064502. [Google Scholar] [CrossRef]
- Lei, Y.; Wang, J.; Li, Y. The Aerodynamic Performance of a Novel Overlapping Octocopter Considering Horizontal Wind. Aerospace 2023, 10, 902. [Google Scholar] [CrossRef]
- Garg, P.K. Characterisation of Fixed-Wing Versus Multirotors UAVs/Drones. J. Geomatics 2022, 16, 152–159. [Google Scholar] [CrossRef]
- Vohra, D.; Garg, P.; Ghosh, S. Problems and prospects of flying rotor drones particularly quadcopters. Türk. İnsansız Hava Araçları Derg. 2022, 4, 1–7. [Google Scholar] [CrossRef]
- Panagiotou, P.; Yakinthos, K. Aerodynamic efficiency and performance enhancement of fixed-wing UAVs. Aerosp. Sci. Technol. 2020, 99, 105575. [Google Scholar] [CrossRef]
- Elijah, T.; Jamisola, R.S.; Tjiparuro, Z.; Namoshe, M. A review on control and maneuvering of cooperative fixed-wing drones. Int. J. Dyn. Control 2021, 9, 1332–1349. [Google Scholar] [CrossRef]
- Boon, M.A.; Drijfhout, A.P.; Tesfamichael, S. Comparison of a fixed-wing and multi-rotor UAV for environmental mapping applications: A case study. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2017, 42, 47–54. [Google Scholar] [CrossRef]
- Jo, D.; Kwon, Y. Analysis of VTOL UAV propellant technology. J. Comput. Commun. 2017, 5, 76–82. [Google Scholar] [CrossRef][Green Version]
- Rehan, M.; Akram, F.; Shahzad, A.; Shams, T.A.; Ali, Q. Vertical take-off and landing hybrid unmanned aerial vehicles: An overview. Aeronaut. J. 2022, 126, 2017–2057. [Google Scholar] [CrossRef]
- Rodriguez, A.A.; Shekaramiz, M.; Masoum, M.A. Computer Vision-Based Path Planning with Indoor Low-Cost Autonomous Drones: An Educational Surrogate Project for Autonomous Wind Farm Navigation. Drones 2024, 8, 154. [Google Scholar] [CrossRef]
- Yang, C.; Zhou, H.; Liu, X.; Ke, Y.; Gao, B.; Grzegorzek, M.; See, J. BladeView: Toward Automatic Wind Turbine Inspection With Unmanned Aerial Vehicle. IEEE Trans. Autom. Sci. Eng. 2024. [Google Scholar] [CrossRef]
- Pinney, B.; Duncan, S.; Shekaramiz, M.; Masoum, M.A. Drone Path Planning and Object Detection via QR Codes; A Surrogate Case Study for Wind Turbine Inspection. In Proceedings of the Intermountain Engineering, Technology and Computing (IETC), Orem, UT, USA, 13–14 May 2022; pp. 1–6. [Google Scholar]
- Zhang, Z.; Shu, Z. Unmanned Aerial Vehicle (UAV)-Assisted Damage Detection of Wind Turbine Blades: A Review. Energies 2024, 17, 3731. [Google Scholar] [CrossRef]
- Li, Z.; Wu, J.; Xiong, J.; Liu, B. Research on automatic path planning of wind turbines inspection based on combined UAV. In Proceedings of the 2024 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Toronto, ON, Canada, 19–21 June 2024; pp. 1–6. [Google Scholar]
- Foster, A.J.; Gianni, M.; Aly, A.; Samani, H.; Sharma, S. Multi-Robot Coverage Path Planning for the Inspection of Offshore Wind Farms: A Review. Drones 2023, 8, 10. [Google Scholar] [CrossRef]
- Su, J.; Ling, F.; Zhou, M.; Chen, X.; Jiang, W. A Path Planning Method for UAV Inspection of Wind Turbines. In Proceedings of the 2023 4th International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), Hangzhou, China, 25–27 August 2023; pp. 250–254. [Google Scholar]
- Chen, L.; Hu, Z.; Zhang, F.; Guo, Z.; Jiang, K.; Pan, C.; Ding, W. Remote wind farm path planning for patrol robot based on the hybrid optimization algorithm. Processes 2022, 10, 2101. [Google Scholar] [CrossRef]
- Huang, B.; Zhao, J.; Liu, J. A survey of simultaneous localization and mapping with an envision in 6G wireless networks. arXiv 2019, arXiv:1909.05214. [Google Scholar]
- Einsiedler, J.; Radusch, I.; Wolter, K. Vehicle indoor positioning: A survey. In Proceedings of the 2017 14th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2017; pp. 1–6. [Google Scholar]
- Shihavuddin, A.S.M.; Chen, X.; Fedorov, V.; Nymark Christensen, A.; Andre Brogaard Riis, N.; Branner, K.; Reinhold Paulsen, R. Wind turbine surface damage detection by deep learning aided drone inspection analysis. Energies 2019, 12, 676. [Google Scholar] [CrossRef]
- Pierce, S.G.; Burnham, K.; McDonald, L.; MacLeod, C.N.; Dobie, G.; Summan, R.; McMahon, D. Quantitative inspection of wind turbine blades using UAV deployed photogrammetry. In Proceedings of the 9th European Workshop on Structural Health Monitoring (EWHM 2018), Manchester, UK, 10–13 July 2018; pp. 1–12. [Google Scholar]
- Tan, X.; Zhang, G. Research on surface defect detection technology of wind turbine blade based on UAV image. Instrumentation 2022, 9, 41–48. [Google Scholar]
- Dutta, S.; Liu, S.; Karigiannis, J.; Tan, Y.T.; Theurer, C.B.; Song, G. Autonomous Wind-Turbine Blade Tracking Using A Dual-Camera System. In Proceedings of the 2023 29th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Queenstown, New Zealand, 21–24 November 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar]
- Reddy, A.; Indragandhi, V.; Ravi, L.; Subramaniyaswamy, V. Detection of Cracks and Damage in Wind Turbine Blades Using Artificial Intelligence-Based Image Analytics. Measurement 2019, 147, 106823. [Google Scholar] [CrossRef]
- Khodabux, W.; Brennan, F. Objective analysis of corrosion pits in offshore wind structures using image processing. Energies 2021, 14, 5428. [Google Scholar] [CrossRef]
- Brijder, R.; Hagen, C.H.; Cortés, A.; Irizar, A.; Thibbotuwa, U.C.; Helsen, S.; Ompusunggu, A.P. Review of corrosion monitoring and prognostics in offshore wind turbine structures: Current status and feasible approaches. Front. Energy Res. 2022, 10, 991343. [Google Scholar] [CrossRef]
- Mathiesen, T.; Black, A.; Grønvold, F. Monitoring and inspection options for evaluating corrosion in offshore wind foundations. In Proceedings of the NACE Corrosion, Vancouver, BC, Canada, 6–10 March 2016; NACE: Vancouver, BC, Canada, 2016. [Google Scholar]
- Shittu, A.A.; Mehmanparast, A.; Shafiee, M.; Kolios, A.; Hart, P.; Pilario, K. Structural reliability assessment of offshore wind turbine support structures subjected to pitting corrosion-fatigue: A damage tolerance modelling approach. Wind Energy 2020, 23, 2004–2026. [Google Scholar] [CrossRef]
- Shamir, M.; Braithwaite, J.; Mehmanparast, A. Fatigue life assessment of offshore wind support structures in the presence of corrosion pits. Mar. Struct. 2023, 92, 103505. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, M.; Lu, X.; Wang, Z. Effect of temperature and ultraviolet radiation on corrosion behavior of carbon steel in high humidity tropical marine atmosphere. Mater. Chem. Phys. 2022, 277, 124962. [Google Scholar] [CrossRef]
- Su, S.; Zhu, X.T.; Fan, H.Q. Effect of ultraviolet light on the corrosion behavior of weathering steel in simulated marine atmospheric environment. Anti-Corros. Methods Mater. 2024, 71, 105–113. [Google Scholar] [CrossRef]
- Anastasiia, A.; Huang, Y.; Shen, Z.; Serguei, S. Influence of the UV Radiation on the Corrosion Resistance of the Carbon-Based Coatings for the Marine Industry. In Proceedings of the NACE CORROSION, Nashville, TN, USA, 24–28 March 2019. [Google Scholar]
- Liu, Y.; Hajj, M.; Bao, Y. Review of robot-based damage assessment for offshore wind turbines. Renew. Sustain. Energy Rev. 2022, 158, 112187. [Google Scholar] [CrossRef]
- Yang, B.; Zhang, L.; Zhang, W.; Ai, Y. Non-destructive testing of wind turbine blades using an infrared thermography: A review. In Proceedings of the International Conference on Materials for Renewable Energy and Environment, Chengdu, China, 19–21 August 2013; pp. 407–410. [Google Scholar]
- Xiao, W.; Zuo, H.; Xu, J.; Lu, J.; He, Z. Detection of Delamination Defects in Carbon Fiber Composites Based on Infrared Thermal Imaging. In Proceedings of the 2021 Global Reliability and Prognostics and Health Management (PHM-Nanjing), Nanjing, China, 15–17 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Ciampa, F.; Mahmoodi, P.; Pinto, F.; Meo, M. Recent advances in active infrared thermography for non-destructive testing of aerospace components. Sensors 2018, 18, 609. [Google Scholar] [CrossRef] [PubMed]
- Galleguillos, C.; Zorrilla, A.; Jimenez, A.; Diaz, L.; Montiano, Á.L.; Barroso, M.; Lasagni, F. Thermographic non-destructive inspection of wind turbine blades using unmanned aerial systems. Plast. Rubber Compos. 2015, 44, 98–103. [Google Scholar] [CrossRef]
- Yu, J.; He, Y.; Zhang, F.; Sun, G.; Hou, Y.; Liu, H.; Wang, H. An infrared image stitching method for wind turbine blade using UAV flight data and U-Net. IEEE Sens. J. 2023, 23, 8727–8736. [Google Scholar] [CrossRef]
- Yu, J.; He, Y.; Liu, H.; Zhang, F.; Li, J.; Sun, G.; Wang, H. An improved U-Net model for infrared image segmentation of wind turbine blade. IEEE Sens. J. 2022, 23, 1318–1327. [Google Scholar] [CrossRef]
- Urtasun, B.; de Uralde, P.L.; Velar, K.; Gorostegui-Colinas, E.; Neelov, J.; Wright, S.; Basiri, M. Pulsed Thermography Digital Motion Stabilization for the Unmanned Vehicle Inspection of Solar Farms and GFRP Wind Blades through UAVs and UGVs. In Proceedings of the Thermosense: Thermal Infrared Applications XLIII, 12 April 2021; SPIE: Bellingham, WA, USA, 2021; Volume 11743, pp. 42–57. [Google Scholar]
- Sanati, H.; Wood, D.; Sun, Q. Condition monitoring of wind turbine blades using active and passive thermography. Appl. Sci. 2018, 8, 2004. [Google Scholar] [CrossRef]
- Avdelidis, N.P.; Gan, T.H. Non-destructive evaluation (NDE) of composites: Infrared (IR) thermography of wind turbine blades. In Non-Destructive Evaluation (NDE) of Polymer Matrix Composites; Woodhead Publishing: Cambridge, UK, 2013; pp. 634–650. [Google Scholar]
- Li, X.; He, Y.; Wang, H.; Sun, G.; Yu, J.; Du, X.; Wang, Y. Thermal inspection of subsurface defects in wind turbine blade segments under the natural solar condition. IEEE Trans. Ind. Electron. 2023, 71, 11488–11497. [Google Scholar] [CrossRef]
- Samareh-Mousavi, S.S.; Chen, X.; McGugan, M.; Semenov, S.; Berring, P.; Branner, K.; Ludwig, N. Monitoring fatigue delamination growth in a wind turbine blade using passive thermography and acoustic emission. Struct. Health Monit. 2024, 23, 14759217231217179. [Google Scholar] [CrossRef]
- Wang, C.; Gu, Y. Research on infrared nondestructive detection of small wind turbine blades. Results Eng. 2022, 15, 100570. [Google Scholar] [CrossRef]
- Schwahlen, D.; Handmann, U. Effects of environmental influences on active thermography to detect the inner structures of wind turbine rotor blades. In Proceedings of the 2018 IEEE Conference on Technologies for Sustainability (SusTech), Long Beach, CA, USA, 11–13 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 154–158. [Google Scholar]
- Fey, J.; Djahan, C.; Mpouma, T.A.; Neh-Awah, J.; Handmann, U. Active thermographic structural feature inspection of wind-turbine rotor. In Proceedings of the 2017 Far East NDT New Technology & Application Forum (FENDT), Xi’an, China, 22–24 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 138–142. [Google Scholar]
- Jensen, F.; Terlau, M.; Sorg, M.; Fischer, A. Active thermography for the detection of sub-surface defects on a curved and coated GFRP-structure. Appl. Sci. 2021, 11, 9545. [Google Scholar] [CrossRef]
- Lizaranzu, M.; Lario, A.; Chiminelli, A.; Amenabar, I. Non-destructive testing of composite materials by means of active thermography-based tools. Infrared Phys. Technol. 2015, 71, 113–120. [Google Scholar] [CrossRef]
- Memari, M.; Shekaramiz, M.; Masoum, M.A.; Seibi, A.C. Data fusion and ensemble learning for advanced anomaly detection using multi-spectral RGB and thermal imaging of small wind turbine blades. Energies 2024, 17, 673. [Google Scholar] [CrossRef]
- Collier, B.; Memari, M.; Shekaramiz, M.; Masoum, M.A.; Seibi, A. Wind Turbine Blade Fault Detection via Thermal Imaging Using Deep Learning. In Proceedings of the 2024 Intermountain Engineering, Technology and Computing (IETC), Logan, UT, USA, 13–14 May 2024; pp. 23–28. [Google Scholar]
- Sheiati, S.; Chen, X. Deep learning-based fatigue damage segmentation of wind turbine blades under complex dynamic thermal backgrounds. Struct. Health Monit. 2024, 23, 539–554. [Google Scholar] [CrossRef]
- Jaeger, B.E.; Schmid, S.; Grosse, C.U.; Gögelein, A.; Elischberger, F. Infrared thermal imaging-based turbine blade crack classification using deep learning. J. Nondestruct. Eval. 2022, 41, 74. [Google Scholar] [CrossRef]
- Nasrollahi, M.; Bolourian, N.; Zhu, Z.; Hammad, A. Designing LiDAR-equipped UAV platform for structural inspection. In Proceedings of the International Symposium on Automation and Robotics in Construction (ISARC), Berlin, Germany, 20–25 July 2018; IAARC Publications: Berlin, Germany, 2018; Volume 35, pp. 1–8. [Google Scholar]
- Bolourian, N.; Hammad, A. LiDAR-equipped UAV path planning considering potential locations of defects for bridge inspection. Autom. Constr. 2020, 117, 103250. [Google Scholar] [CrossRef]
- Kaartinen, E.; Dunphy, K.; Sadhu, A. LiDAR-based structural health monitoring: Applications in civil infrastructure systems. Sensors 2022, 22, 4610. [Google Scholar] [CrossRef] [PubMed]
- Ghaedi, K.; Gordan, M.; Ismail, Z.; Hashim, H.; Talebkhah, M. A literature review on the development of remote sensing in damage detection of civil structures. J. Eng. Res. Rep. 2021, 20, 39–56. [Google Scholar] [CrossRef]
- Oliveira, A.; Dias, A.; Santos, T.; Rodrigues, P.; Martins, A.; Almeida, J. LiDAR-based unmanned aerial vehicle offshore wind blade inspection and modeling. Drones 2024, 8, 617. [Google Scholar] [CrossRef]
- Car, M.; Markovic, L.; Ivanovic, A.; Orsag, M.; Bogdan, S. Autonomous wind-turbine blade inspection using LiDAR-equipped unmanned aerial vehicle. IEEE Access 2020, 8, 131380–131387. [Google Scholar] [CrossRef]
- Durdevic, P.; Ortiz-Arroyo, D.; Yang, Z. LiDAR Assisted Camera Inspection of Wind Turbines: Experimental Study. In Proceedings of the 2019 1st International Conference on Electrical, Control and Instrumentation Engineering (ICECIE), Kuala Lumpur, Malaysia, 25 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Castelar Wembers, C.; Pflughaupt, J.; Moshagen, L.; Kurenkov, M.; Lewejohann, T.; Schildbach, G. LiDAR-based automated UAV inspection of wind turbine rotor blades. J. Field Robot. 2024, 41, 1116–1132. [Google Scholar] [CrossRef]
- Nikolov, I.A.; Madsen, C.B. LiDAR-based 2D Localization and Mapping System using Elliptical Distance Correction Models for UAV Wind Turbine Blade Inspection. In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), Porto, Portugal, 27 February–1 March 2017. [Google Scholar]
- Law, H.; Koutsos, V. Leading edge erosion of wind turbines: Effect of solid airborne particles and rain on operational wind farms. Wind Energy 2020, 23, 1955–1965. [Google Scholar] [CrossRef]
- Aird, J.A.; Barthelmie, R.J.; Pryor, S.C. Automated quantification of wind turbine blade leading edge erosion from field images. Energies 2023, 16, 2820. [Google Scholar] [CrossRef]
- Katsaprakakis, D.A.; Papadakis, N.; Ntintakis, I. A comprehensive analysis of wind turbine blade damage. Energies 2021, 14, 5974. [Google Scholar] [CrossRef]
- Mishnaevsky Jr, L.; Hasager, C.B.; Bak, C.; Tilg, A.M.; Bech, J.I.; Rad, S.D.; Fæster, S. Leading edge erosion of wind turbine blades: Understanding, prevention, and protection. Renew. Energy 2021, 169, 953–967. [Google Scholar] [CrossRef]
- Mattar, R.A.; Kalai, R. Development of a wall-sticking drone for non-destructive ultrasonic and corrosion testing. Drones 2018, 2, 8. [Google Scholar] [CrossRef]
- Zhu, X.; Guo, Z.; Zhou, Q.; Zhu, C.; Liu, T.; Wang, B. Damage identification of wind turbine blades based on deep learning and ultrasonic testing. Nondestruct. Test. Eval. 2024. [Google Scholar] [CrossRef]
- Zhang, D.; Watson, R.; Cao, J.; Zhao, T.; Dobie, G.; MacLeod, C.; Pierce, G. Dry-coupled airborne ultrasonic inspection using coded excitation. In Proceedings of the 2020 IEEE International Ultrasonics Symposium (IUS), Las Vegas, NV, USA, 7–11 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–4. [Google Scholar]
- Watson, R.; Kamel, M.; Zhang, D.; Dobie, G.; MacLeod, C.; Pierce, S.G.; Nieto, J. Dry coupled ultrasonic non-destructive evaluation using an over-actuated unmanned aerial vehicle. IEEE Trans. Autom. Sci. Eng. 2021, 19, 2874–2889. [Google Scholar] [CrossRef]
- Solimine, J.; Niezrecki, C.; Inalpolat, M. An experimental investigation into passive acoustic damage detection for structural health monitoring of wind turbine blades. Struct. Health Monit. 2020, 19, 1711–1725. [Google Scholar] [CrossRef]
- Purarjomandlangrudi, A.; Nourbakhsh, G. Acoustic emission condition monitoring: An application for wind turbine fault detection. Int. J. Res. Eng. Technol. 2013, 2, 907–918. [Google Scholar]
- Sánchez, P.J.B.; Ramirez, I.S.; Márquez, F.P.G. Wind turbines acoustic inspections performed with UAV and sound frequency domain analysis. In Proceedings of the 2021 7th International Conference on Control, Instrumentation and Automation (ICCIA), Tabriz, Iran, 23–24 February 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]
- Sánchez, P.J.B.; Márquez, F.P.G. Artificial Neural Networks Applied for Wind Turbines Maintenance Management in Unmanned Aerial Vehicle Acoustic Inspection Case. 3; Springer: Berlin/Heidelberg, Germany, 2023; pp. 37–49. [Google Scholar]
- Bernalte Sánchez, P.; Segovia Ramírez, I.; García Márquez, F.P.; Pliego Marugán, A. Acoustic signals analysis from an innovative UAV inspection system for wind turbines. Struct. Health Monit. 2024. [Google Scholar] [CrossRef]
- García Márquez, F.P.; Bernalte Sánchez, P.J.; Segovia Ramírez, I. Acoustic inspection system with unmanned aerial vehicles for wind turbines structure health monitoring. Struct. Health Monit. 2022, 21, 485–500. [Google Scholar] [CrossRef]
- Tanrıverdi, H.; Karakuş, G.; Ulukan, A. Wind turbine inspection with drone: Advantages and disadvantages. J. Energy Syst. 2023, 7, 57–66. [Google Scholar] [CrossRef]
- Kolios, A. Assessing Risks for the Use of Drones for Wind Turbine Inspections. J. Phys. Conf. Ser. 2024, 2767, 032030. [Google Scholar] [CrossRef]
- Chen, W.; Liu, J.; Guo, H.; Kato, N. Toward robust and intelligent drone swarm: Challenges and future directions. IEEE Netw. 2020, 34, 278–283. [Google Scholar] [CrossRef]
- Eid, S.E.; Dol, S.S. Design and development of lightweight-high endurance unmanned aerial vehicle for offshore search and rescue operation. In Proceedings of the 2019 Advances in Science and Engineering Technology International Conference, Dubai, United Arab Emirates, 26 March–10 April 2019. [Google Scholar]
- Wang, J.; Zhou, K.; Xing, W.; Li, H.; Yang, Z. Applications, evolutions, and challenges of drones in maritime transport. J. Mar. Sci. Eng. 2023, 11, 2056. [Google Scholar] [CrossRef]
- Kim, J.; Choi, Y.; Jeon, S.; Kang, J.; Cha, H. Optrone: Maximizing performance and energy resources of drone batteries. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2020, 39, 3931–3943. [Google Scholar] [CrossRef]
- Mukhopadhyay, S.; Fernandes, S.; Shihab, M.; Waleed, D. Using small capacity fuel cells onboard drones for battery cooling: An experimental study. Appl. Sci. 2018, 8, 942. [Google Scholar] [CrossRef]
- Choi, Y.; Schonfeld, P.M. Optimization of multi-package drone deliveries considering battery capacity. In Proceedings of the 96th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 8–12 January 2017; pp. 8–12. [Google Scholar]
- Varghese, C.K.; Abraham, A.; Das, S.A.; Joseph, G.A.; Vaidappilly, S.G.; Christopher, K. Design and Fabrication of a Drone for Payload Delivery. AIP Conf. Proc. 2024, 3134, 130008. [Google Scholar]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 70–85. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).