1. Introduction
The stable operation of power systems is crucial for ensuring the normal functioning of society and supporting economic development. However, with the continuous increase in the scale and complexity of power systems, their accurate monitoring and control face growing challenges, such as model uncertainty, equipment anomalies, communication interference, and malicious cyberattacks [
1,
2]. The uncertainty brought by multiple disturbances may lead to power angle instability, voltage collapse, or even large-scale system separation, causing serious safety incidents [
3]. Therefore, achieving accurate perception and robust estimation of power system operating states under complex disturbances has become a key issue in smart grid research.
Dynamic state estimation (DSE) is a common method for improving the observability of power systems. Its core idea is to integrate structural modeling information with real-time measurement data to approximate the true evolution of system states, even during disturbances or anomalies. As the earliest estimation algorithm applied in power systems, the Kalman filter (KF) [
4] performs recursive estimation through state transition and measurement models. However, its assumptions of linearity, Gaussian noise, and known covariances limit its estimation accuracy in nonlinear scenarios. To address the nonlinear modeling demands of power systems, ref. [
5] introduced the Extended Kalman filter (EKF), which linearizes nonlinear system models using Taylor’s expansion. Nevertheless, it requires frequent Jacobian matrix computation, which is computationally expensive and prone to divergence in strongly nonlinear systems. The UKF proposed in [
6] adopts the Unscented Transform (UT) technique to generate sigma points, which can more accurately capture the nonlinear propagation process, thus improving estimation performance and becoming one of the mainstream nonlinear filtering solutions.
Although the EKF and the UKF demonstrate satisfactory performance under standard conditions, they exhibit notable shortcomings when facing frequent anomalies and data disturbances in actual power systems. In particular, observational anomalies or malicious tampering of measurement data can cause enlarged estimation bias and filter divergence. To address these problems, researchers have proposed various robust filtering enhancements. For example, by combining the UKF with the Weighted Least Squares (WLS) for real-time application, ref. [
7] detects the difference between estimated values to identify Deliberate Data Injection Attacks (FDIAs). Ref. [
8] establishes a DC Microgrid (DC MG) model including FDIAs and analyzes the attacked system. Ref. [
9] introduces an attack amplitude planning strategy to utilize noise tolerance and bypass residual detection by reviewing the limitations of traditional residual methods and Kalman filter-based detectors in FDIA detection in noise and complex networks. In [
10], a novel outlier detection and state correction strategy is proposed by comparing the deviation between the EKF and the WLS with an offline threshold. In [
11], the robustness of the Cubature Kalman filter (CKF) algorithm is enhanced by a decay factor, and an interactive multi-model is integrated to achieve hypersonic target tracking. Ref. [
12] improves the robustness of the CKF algorithm through M-estimation, enabling target tracking in the case of missing measurements. Ref. [
13] uses the maximum cross-correlation criterion to optimize the CKF algorithm to solve the scenario where process or measurement noise is unknown.
In addition to algorithmic enhancements within estimation frameworks, cross-disciplinary research has introduced noise-resilient modeling and diagnostic strategies to improve state observability under non-Gaussian and unknown disturbances. For instance, ref. [
14] proposes a cyclostationarity-based blind deconvolution method for early bearing fault detection in non-Gaussian noise, while [
15] formulates a dynamic acoustic emission detection model to simulate fault evolution and signal response. These works offer new modeling perspectives for robust system monitoring and inspire improvements in estimation robustness in complex industrial scenarios.
Furthermore, ref. [
16] proposes an unscented Kalman filter based on the robust M-estimation (M-UKF) algorithm. Although this method can handle observational anomalies, it does not address the impact of measurement and model parameter tampering attacks on dynamic state estimation algorithms. Aiming at outliers and non-Gaussian noise in measurements, ref. [
17] improves the UKF based on generalized maximum likelihood estimation, improving the accuracy and efficiency of estimation. While these methods improve robustness against measurement anomalies and statistical deviations, they still lack sufficient resistance to active attacks, such as tampering with measurements or model parameters. This vulnerability can lead to state drift and estimation distortion, posing significant operational risks to power systems. Therefore, developing dynamic state estimation methods that combine adaptability with anti-attack capabilities is an urgent research need.
In summary, the traditional UKF algorithm suffers from limited convergence, fixed parameters, and vulnerability to attacks when operating under complex disturbance environments in power systems, making it difficult to meet the future requirements for highly reliable situational awareness in smart grids. To this end, this paper proposes an improved sparrow search algorithm–optimized unscented Kalman filter (ISSA-UKF) method. This method introduces an intelligent optimization mechanism to realize the adaptive adjustment of UKF parameters and combines an anomaly-aware estimation strategy to improve the adaptability to system anomalies and cyberattacks. This article conducts simulation verification in typical power system models and systematically evaluates the robustness and performance advantages of the algorithm from three scenarios: normal state, observational anomalies, and cyberattacks, verifying its effectiveness and practicability in complex disturbance environments.
2. Power System Dynamic Model
To accurately model generator and power grid operating conditions, this section establishes a power system dynamics model for subsequent estimation algorithms. The model reflects the dynamic response of generators under different operating conditions, providing a foundation for False Data Injection Attack (FDIA) detection and analysis. The dynamics model is based on the classical generator model and is described by the following equations:
where
,
,
, and
represent the rotor angle, angular speed, mechanical power, and output power of generator
.
is the synchronous (rated) speed.
denotes the damping coefficient, and
represents the inertia constant of the generator. The output power
is described as
where
denotes the admittance matrix of a simplified network consisting only of internal generator buses,
is the internal voltage of the generator, and
is the angle of
. The calculation for
follows Equation (4):
where
and
are the load and rotor admittance matrices, and
is the admittance matrix between loads and generators. The discrete form of Equation (1) is shown as
where
and
are the process noise regarding corresponding state variables, and is the simulation time step. Therefore, the parameters to be predicted are the rotor angle
and the rotor angular velocity
.
A nonlinear measurement function is used for DSE in power systems, referred to as the measurement model. In the DSE of power systems, the active and reactive power obtained from generators, as well as the voltage magnitude and phase angle measurements of each bus, are typically used as inputs. The expression for the active power output of a generator is given in Equation (3), while the expression for the reactive power output of the generator is represented as follows:
The voltage magnitude and phase angle measurements can be derived from Equation (7), where
represents the extended system matrix, expressed as
In this expression,
denotes the extended voltage vector, including the internal rotor voltage E and the bus voltage vector
.
is the current injected by the rotor. From Equation (7), the relationship between
and
can be derived as
with
being the matrix of voltage reconstruction. Therefore, the DSE model and the measurement model can be formulated as follows:
4. ISSA-UKF Algorithm
The key to the UKF algorithm lies in the UT. The statistical properties of the Sigma points in the UT are controlled by the scaling proportion parameters. By adjusting the scaling proportion parameters, a reasonable distribution of sampling points can be selected to effectively influence the scaling proportion parameters and improve the filtering performance of the UKF algorithm. To find the optimal distribution of sampling points with minimal prediction error, an appropriate fitness function must be established. Therefore, the mean square error between the actual value and the filter output estimate is chosen as the fitness function, expressed as
where
represents the mean square error of the
k-th actual value and the estimated value;
is the estimation length;
is the actual value; and
is the filter output estimate. When the fitness function value is smaller, the mean square error is smaller, indicating that the ISSA algorithm has found the optimal distribution of sampling points. The algorithm initializes the sampling point distribution parameters and then, through the iterative search process of the ISSA algorithm, generates and adjusts the sampling point distribution parameters with the minimal fitness function value, i.e., the optimal parameters. These parameters are input into the UKF algorithm to enhance its performance. By adaptively updating the sampling point distribution parameters, the UKF algorithm can more accurately estimate system states and improve filtering accuracy. For a general nonlinear discrete dynamic system, the process and measurement models is expressed as in
where
,
represent the state vector and the measurement vector;
and
represent the known nonlinear state transition function and measurement function, respectively;
and
are uncorrelated zero-mean Gaussian white noise with the covariance matrices
and
, respectively. The implementation process of the algorithm is as follows:
Initialization:
where
and
are the initial state and the initial error covariance.
Sigma Point Calculation:
The optimal sampling point distribution parameters
obtained through the ISSA algorithm optimization are substituted into the scaling proportion parameter calculation formula:
where
represents the state dimension;
is the scaling proportion parameter; and
and
are the tuning parameters, with
typically reflecting the sample point distribution.
State Prediction:
where
and
are weights, defined as
with
being the weight coefficient.
Steps 2 to 6 are repeated to complete the UKF algorithm. Unlike the traditional UKF, the ISSA-UKF not only adaptively adjusts the sampling parameters to enhance filtering performance but also improves its responsiveness to observational anomalies and malicious data disturbances through an optimal control parameter search mechanism. Next, through simulation experiments on typical system models, the effectiveness and robustness advantages of the ISSA-UKF in dynamic state estimation will be verified.
5. Experimental Results
5.1. Parameter Settings
To validate the adaptability and robustness of the proposed ISSA-UKF algorithm under various disturbance conditions, two benchmark systems—the WECC 3-machine 9-bus system and the New England 10-machine 39-bus system—are selected for simulation studies in the MATLAB R2024a environment. The experiments are designed to cover three scenarios: normal operation, observational anomalies, and cyber-attacks.
The WECC 3-machine 9-bus system comprises three generators and three load points, with a total load of 315 MW and 115 MVar. The system data and configurations, as well as the inertia constants, are shown in
Table 1. This system has been widely used in multiple power system stability studies. The New England 10-machine 39-bus system includes ten generators and 21 load points, with a total load of 6254.2 MW and 1387.1 MVar. Three generators were selected for this study, and the system data and configurations, along with the inertia constants, are provided in
Table 2.
To assess the performance of the proposed method, a comparative analysis between the ISSA-UKF and the conventional UKF is conducted on both systems. The accuracy of each method is evaluated by comparing the estimated rotor angle and angular velocity with their true values. A smaller estimation error indicates a higher estimation accuracy. All experiments were conducted on a standard desktop CPU platform (Intel Core i7-12700H, 16GB RAM) without GPU acceleration. For both the WECC 3-machine 9-bus system and the New England 10-machine 39-bus system, the execution time of a single state estimation cycle using the ISSA-UKF algorithm does not exceed 3 s, meeting the real-time requirements of small- to medium-scale power system models. Since the core optimization process primarily focuses on adaptive adjustment of low-dimensional covariance parameters and does not involve large-scale matrix decomposition or high-dimensional sampling, the algorithm demonstrates favorable computational efficiency and scalability, making it applicable to larger-scale state estimation tasks.
5.2. Normal Measurement Data
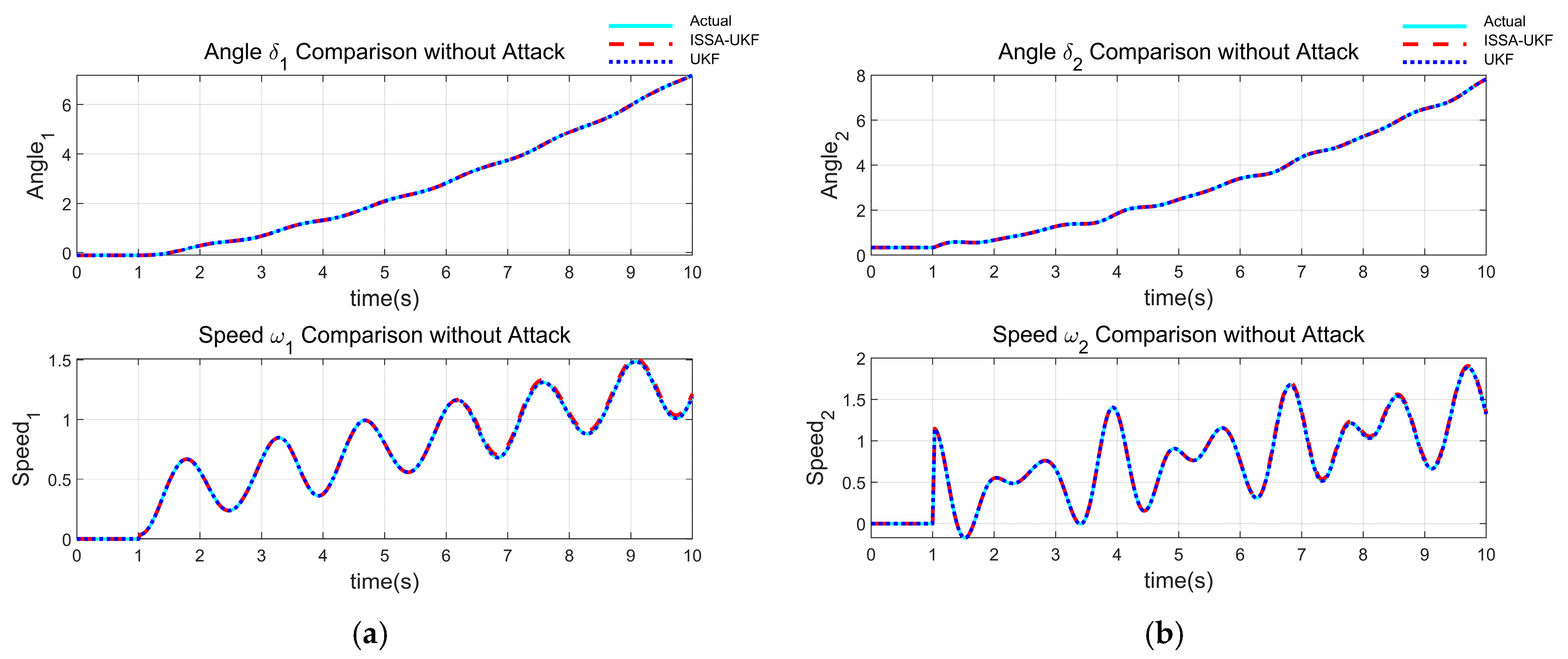
In this experiment, two generators were selected from each of the aforementioned power systems as the study objects, and the same generator configurations were used consistently throughout the subsequent tests. Under the scenario without observational anomalies or cyberattacks, the estimation performance of both the UKF and ISSA-UKF algorithms is compared, as shown in
Figure 2. The results indicate that both algorithms are capable of accurately estimating the dynamic states of the power system under normal operating conditions to observation anomalies.
5.3. Observational Anomalies Without Cyberattacks
To simulate observational anomalies caused by factors such as sensor failure, calibration inaccuracy, communication transmission errors, or external environmental interference, Gaussian pulse noise was injected into the measurements of rotor angle and rotor angular velocity at t = 6.2 s. The disturbance model is:
. Here,
represents the observational anomaly value, and
is a standard normal random number.
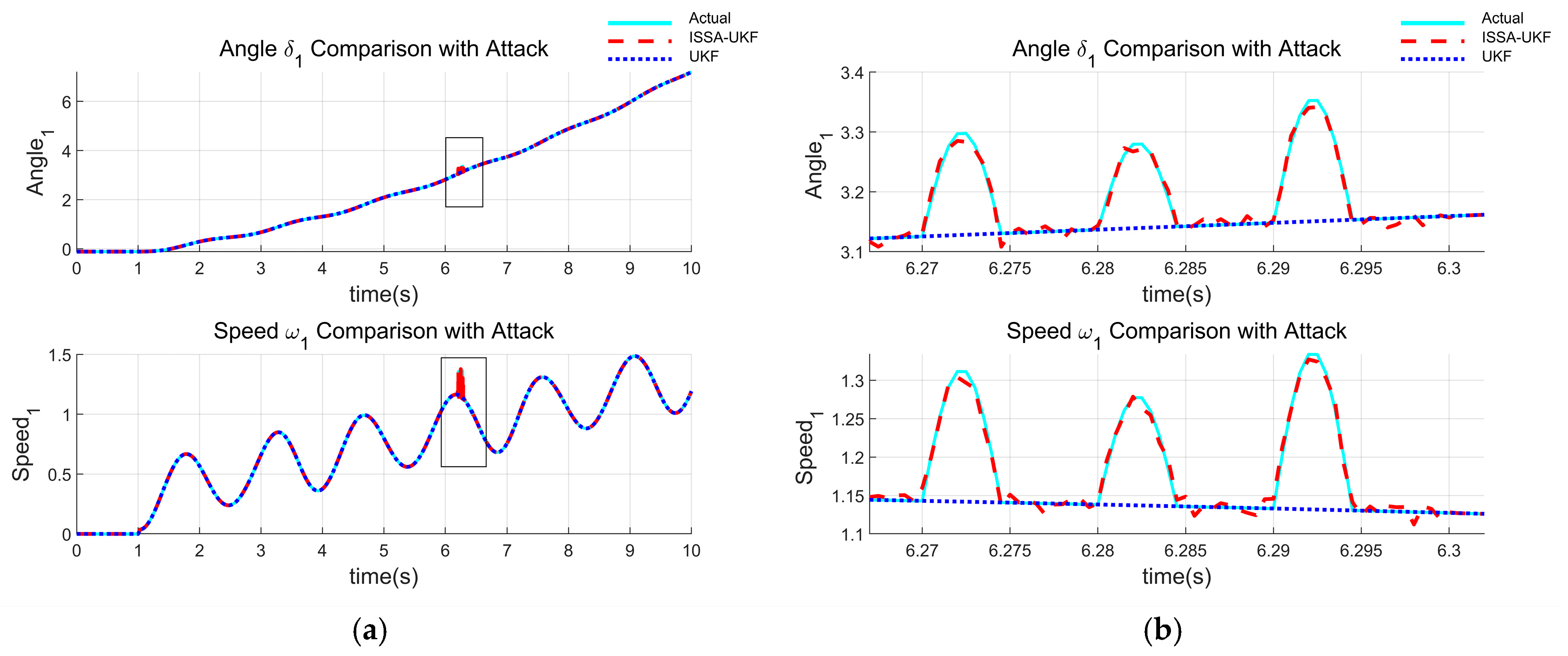
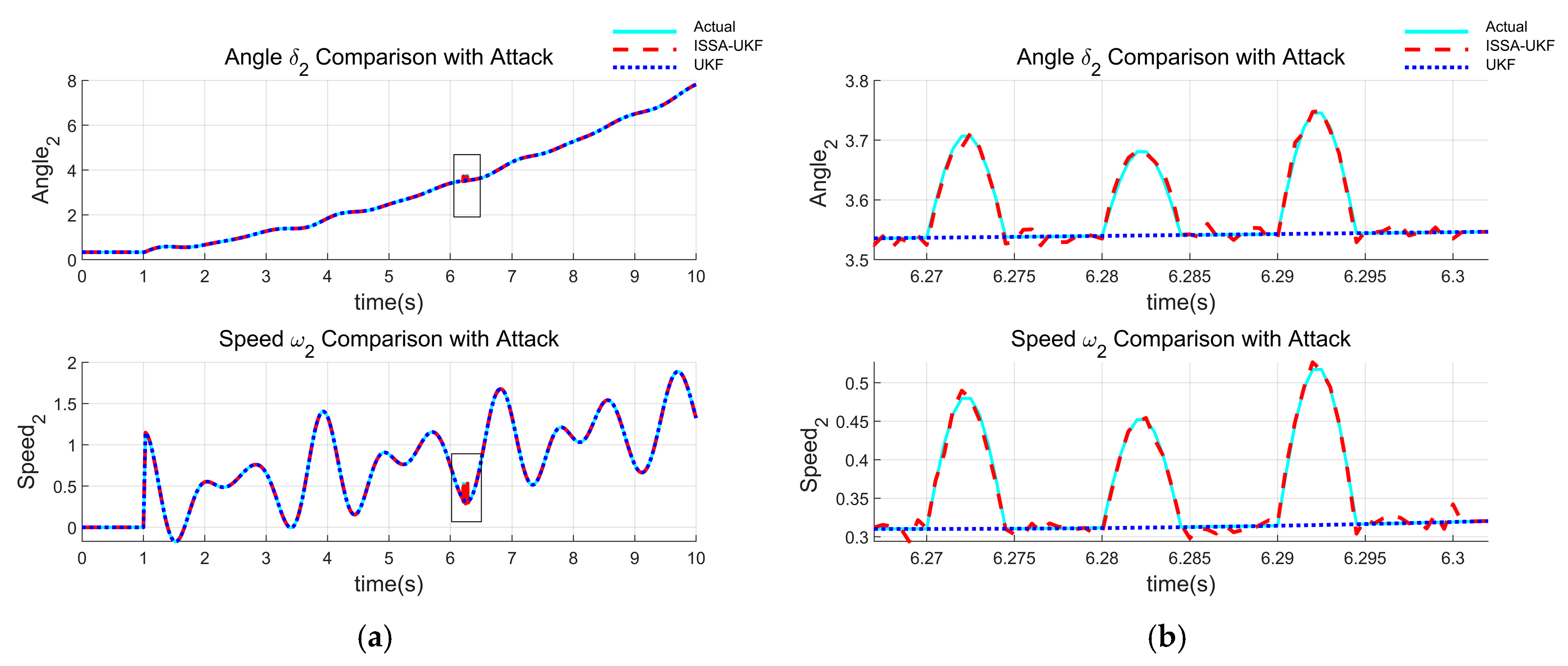
Figure 3 presents the state estimation results for Generator 1 in the WECC 3-machine 9-bus system under observational anomaly conditions, where (a) shows the full view and (b) provides a magnified local view. Similarly,
Figure 4 illustrates the corresponding results for Generator 2. As observed, the standard UKF significantly deviates from the true state once anomalies appear and fails to recover promptly, indicating its poor robustness under such disturbances. In contrast, the proposed ISSA-UKF algorithm maintains accurate tracking of the true state, owing to its ability to dynamically adjust the covariance matrices. This demonstrates its superior robustness and adaptability.
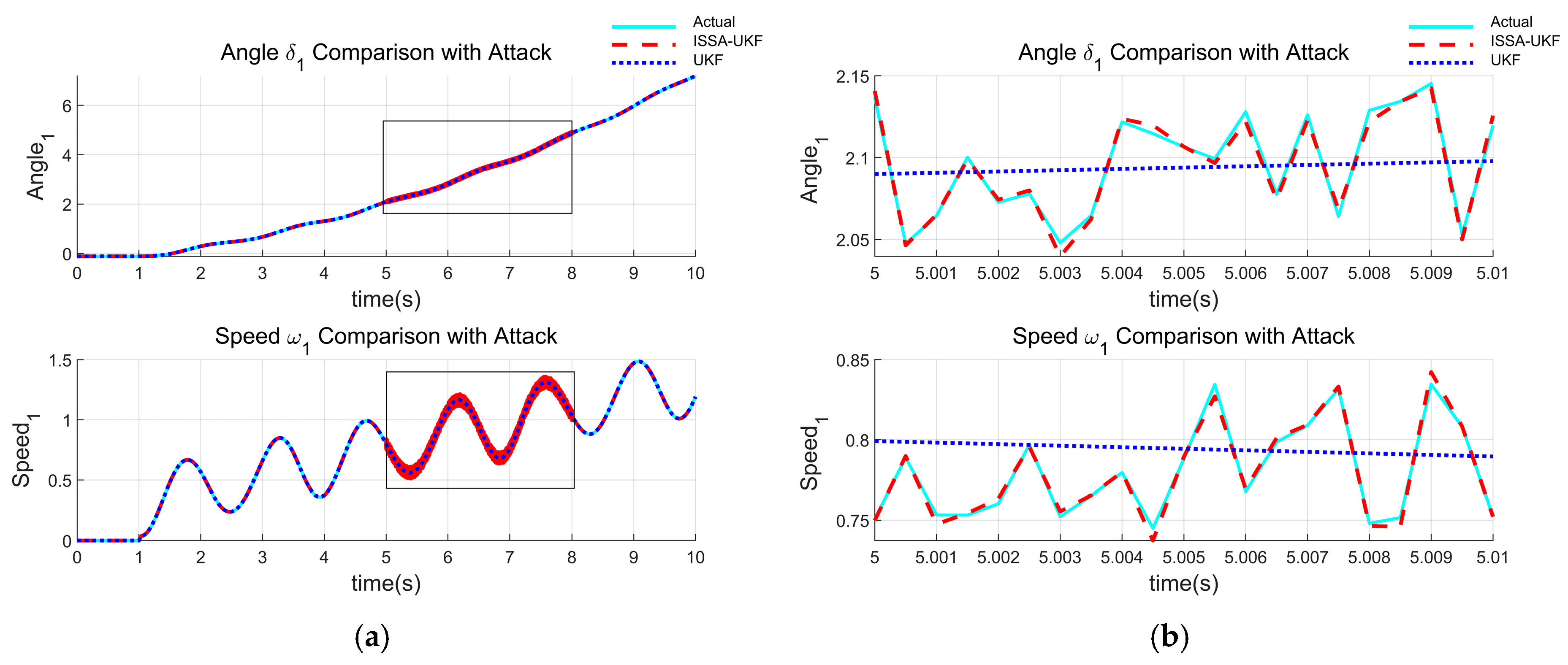
5.4. Cyberattacks
Cyberattacks aim to compromise the estimation accuracy by injecting malicious data into the measurement stream, thereby disturbing the Kalman gain calculation and increasing estimation errors. In the ISSA-UKF framework, such attacks further deteriorate performance by misleading the fitness function used in the ISSA optimizer (as defined in Equation (21)), thus introducing dual-layer disruption. To simulate a cyberattack scenario where measurement values are maliciously tampered, a typical cyberattack was introduced. During the time interval (
s), the measurements used for state estimation (rotor angle and rotor angular velocity) were subjected to the following attack:
where
represents the original system measurements. Random attacks involve injecting disturbances into measurements based on a random distribution, aiming to increase system noise and compromise the accuracy of state estimation, where m is the upper bound, and n is the lower bound of the random attack. To enhance the realism and reproducibility of cyberattack modeling, this paper explicitly defines the amplitude, duration, and injection frequency of the disturbance signals. Specifically, random disturbances with an amplitude of ±5% are injected into the measurement values, corresponding to an upper bound of +0.05 and a lower bound of −0.05, simulating a typical non-destructive false data injection scenario. Disturbances are injected at every sampling interval (0.5 ms), forming a high-frequency random injection pattern. To more effectively disrupt the state estimation process, the attack time window is set during the critical stage of the system’s dynamic response (5–8 s). Although this interval is relatively short compared to the duration of the total simulation, the disturbance is injected at a high frequency (every 0.5 ms), creating an intense and abrupt interference scenario. This configuration is designed to create an extreme interference environment, enabling the comprehensive evaluation of the robustness of various estimation algorithms under adversarial conditions.
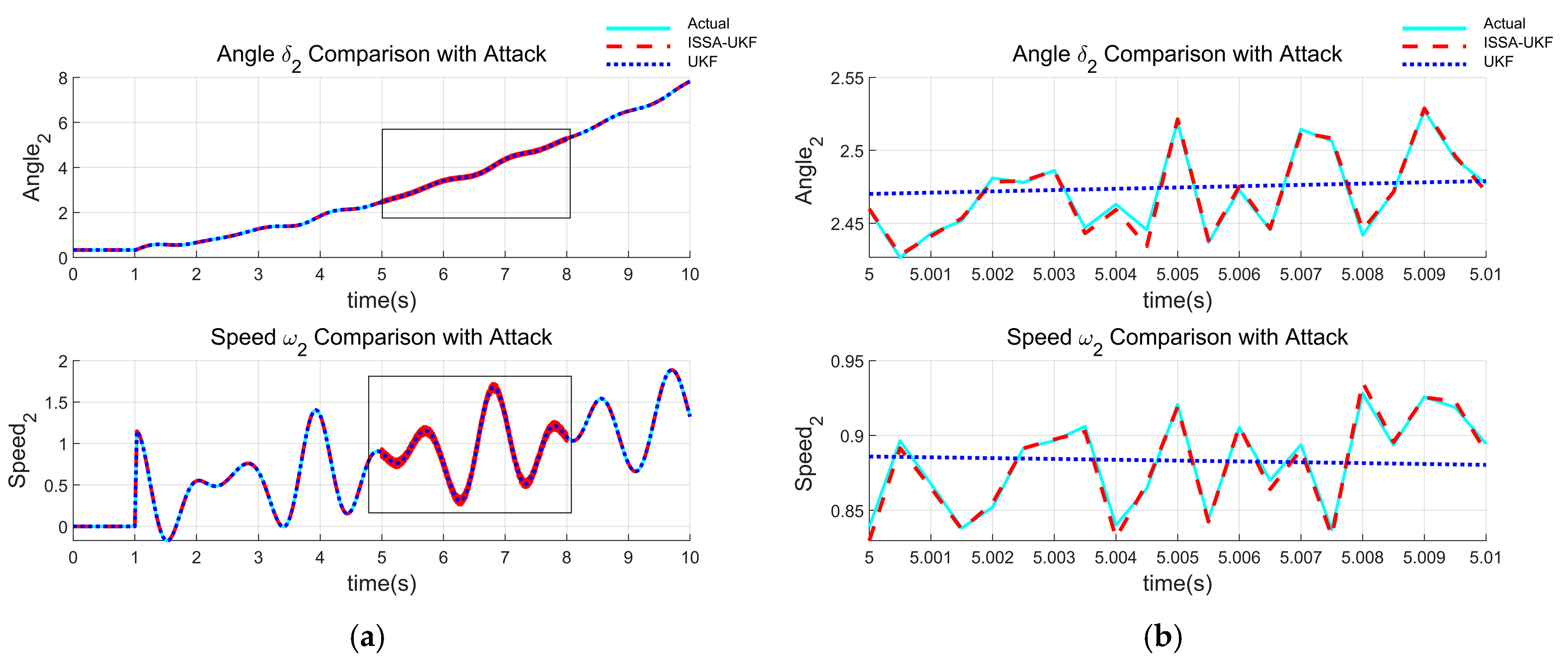
Figure 5 shows the state estimation results under cyberattack conditions for Generator 1, where (a) presents the full view, and (b) illustrates a magnified view during the attack period. Likewise,
Figure 6 provides the corresponding results for Generator 2. The standard UKF fails to detect and respond to the attack, resulting in significant deviations and divergence in the estimation. In contrast, the ISSA-UKF maintains accurate estimation trajectories despite the injected false data, demonstrating its enhanced resilience and robustness against cyberattacks.
To further validate the superiority of the proposed ISSA-UKF algorithm in state estimation under cyberattack conditions, this section expands the comparison beyond the standard UKF by including three commonly used estimation methods: the Extended Kalman filter (EKF), the Cubature Kalman filter (CKF), and the robust M-estimation-based unscented Kalman filter (M-UKF).
Figure 7 presents the locally magnified estimation results of rotor angle
and rotor speed
for Generators 1 and 2 under cyberattack scenarios.
As shown in the figure, EKF exhibits significant fluctuations after the onset of attacks and fails to track the true state accurately. CKF, while offering improved nonlinearity handling, remains highly sensitive to abnormal measurements, resulting in noticeable estimation errors. M-UKF maintains a certain level of robustness in the early phase of the disturbance but shows deviations in the later period. In contrast, the proposed ISSA-UKF algorithm demonstrates the closest tracking performance to the actual values throughout the entire period, with the smallest overall deviation, highlighting its superior robustness and estimation accuracy.
These results indicate that under extreme disturbance conditions such as cyberattacks, ISSA-UKF enhances the system’s state awareness and resilience by adaptively optimizing the covariance matrices and dynamically adjusting sampling parameters. The method not only improves global trend prediction but also effectively suppresses localized errors caused by sudden disturbances, underscoring its potential application value in the secure state estimation of modern power systems.
6. Conclusions
6.1. Research Summary
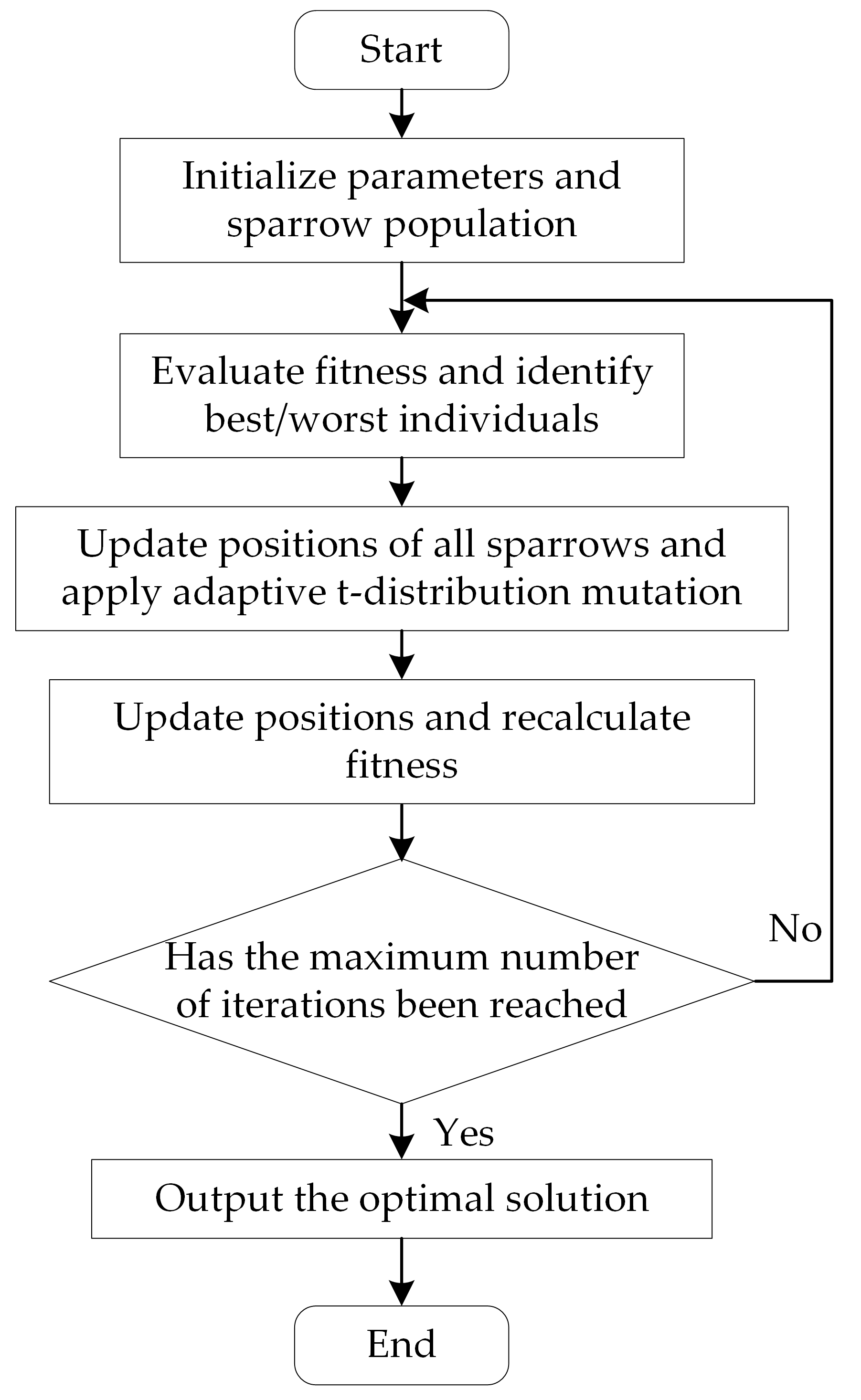
This study addresses the problem of dynamic state estimation in power systems under complex operating conditions and proposes an unscented Kalman filter (UKF) method optimized by an Improved Sparrow Search Algorithm (ISSA-UKF). By incorporating chaotic initialization, a coordinated update mechanism between discoverers and followers, and an adaptive t-distribution mutation operator, the proposed approach retains the global search capability of the Sparrow Search Algorithm while significantly improving convergence speed and solution stability. The optimization strategy allows for the dynamic adjustment of the system and measurement noise covariance matrices in the UKF, enabling a better trade-off between estimation accuracy and computational cost.
The experimental results under three representative disturbance scenarios (normal fluctuations, observational anomalies, and cyberattacks) demonstrate that, compared with the standard UKF, ISSA-UKF achieves higher estimation accuracy and robustness in multi-dimensional state tracking. In particular, it exhibits strong resilience against malicious attacks. Furthermore, comparative analysis with other typical filtering algorithms such as EKF, CKF, and M-UKF further validates the superiority of the proposed method in terms of stability and convergence performance.
From a methodological perspective, the proposed ISSA-UKF offers the following key advantages: (1) The integration of chaotic mapping and adaptive mutation mechanisms effectively avoids premature convergence and enhances search diversity and global coverage. (2) The combination of global evolutionary strategy and UKF-based local estimation enables real-time parameter adjustment and high-precision state tracking. (3) The designed disturbance mechanism demonstrates strong generality and adaptability to nonlinear, high-dimensional state space estimation tasks.
These features ensure that the ISSA-UKF maintains high estimation accuracy and robustness even under extreme conditions such as complex disturbances, unknown inputs, and intentional attacks, thus providing a novel and reliable strategy for the robust perception of power system operational states.
6.2. Limitations and Future Work
Although the effectiveness of the ISSA-UKF has been verified under multiple disturbance scenarios, there remain several directions for future extension. (1) Incorporating more comprehensive error evaluation metrics: The current evaluation focuses on trajectory fitting and robustness. Future research may introduce statistical indicators such as RMSE, MAE, and confidence intervals to enable more systematic and quantitative comparisons of state estimation accuracy across different algorithms. (2) Integrating anomaly detection mechanisms into an end-to-end perception framework: This work focuses on the state estimation methodology and does not address attack detection. Future work could explore embedding anomaly detection modules into the estimation pipeline, enabling an end-to-end robust perception framework that spans from disturbance detection to state reconstruction. (3) Drawing inspiration from interfacial coupling mechanisms to enhance multi-scale modeling accuracy [
21]: Recent advances in heterogeneous system modeling have shown that interfacial electric field coupling can enhance system dynamic response. Future research may draw upon such interface engineering strategies—such as those demonstrated in MoS
2/TiO
2 heterostructures—to improve the adaptability and engineering applicability of estimation methods in multi-scale and high-dimensional systems. (4) Extending to larger-scale systems and hybrid intelligent frameworks: The current validation is based on small- to medium-scale systems. Future work could apply the ISSA-UKF to larger-scale power networks to assess its real-time performance and scalability. Moreover, integrating advanced intelligent optimization techniques such as deep reinforcement learning with the ISSA could further enhance the algorithm’s self-adaptive and online tuning capabilities.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}