
Equivalent Loop Bandwidth of Kalman Filter-Based Tracking Method


Abstract
1. Introduction
2. Mathematical Model of KFT Method
3. Equivalent Loop Bandwidth of KFT Method
4. Simulation Verification
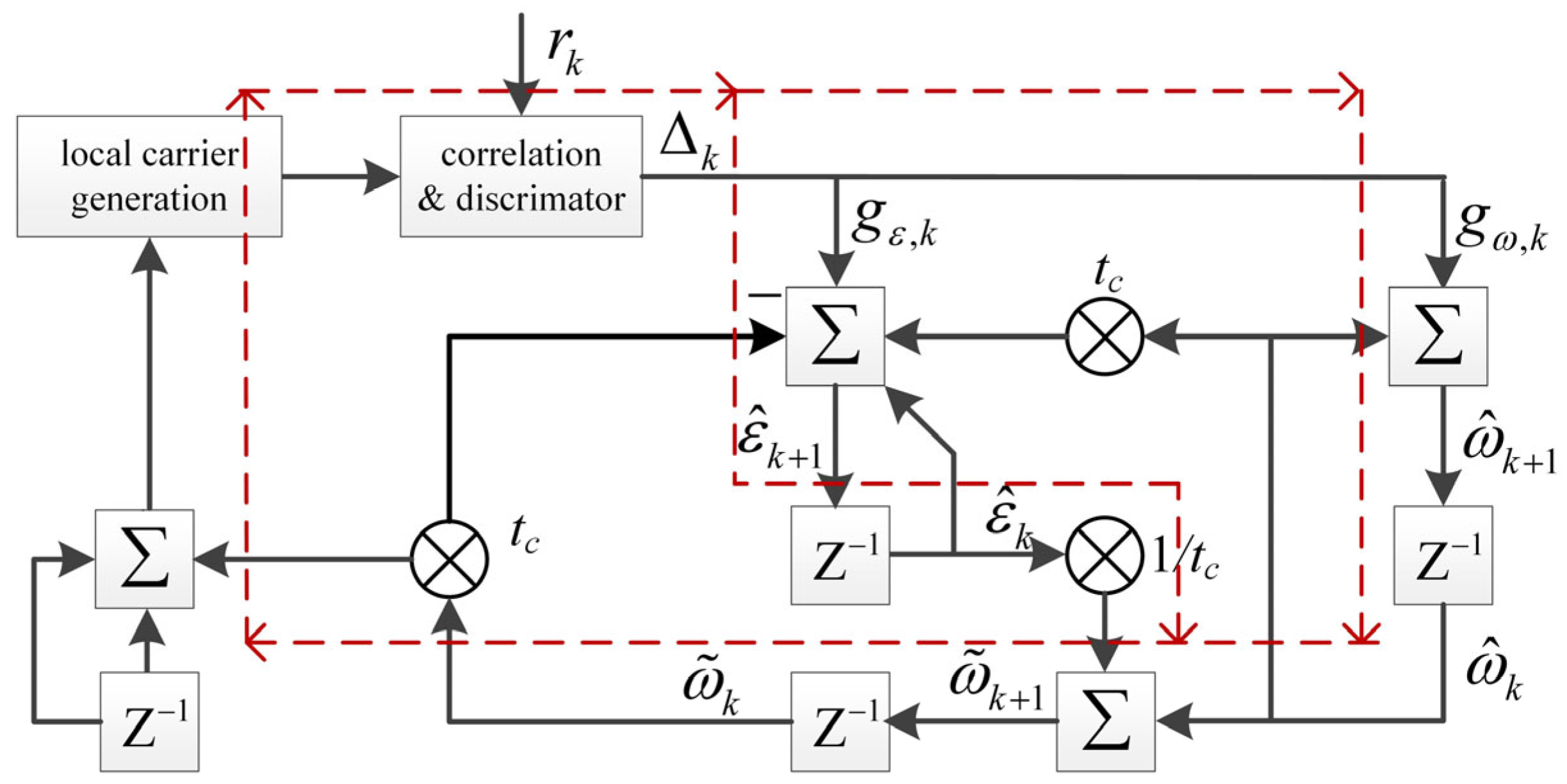
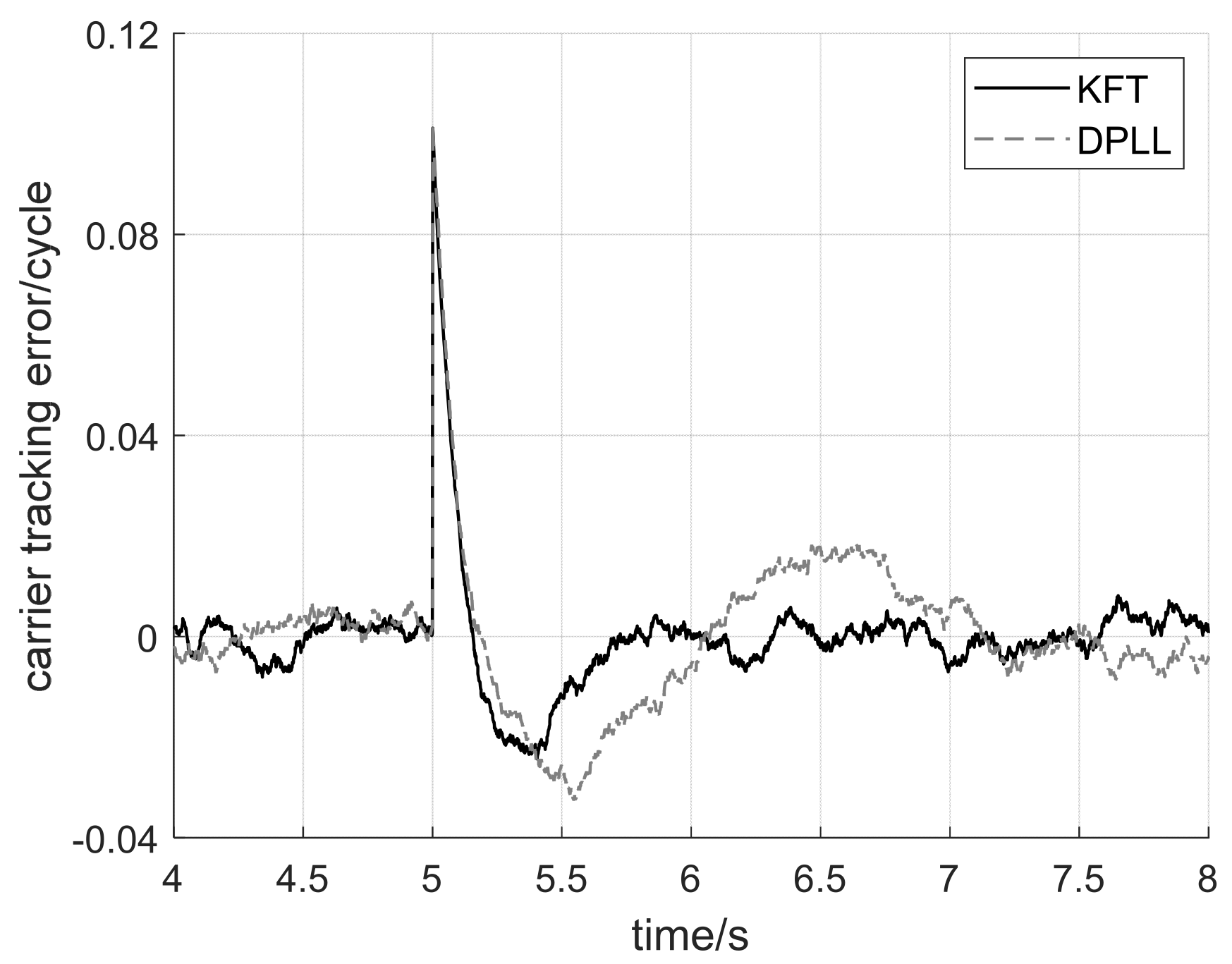
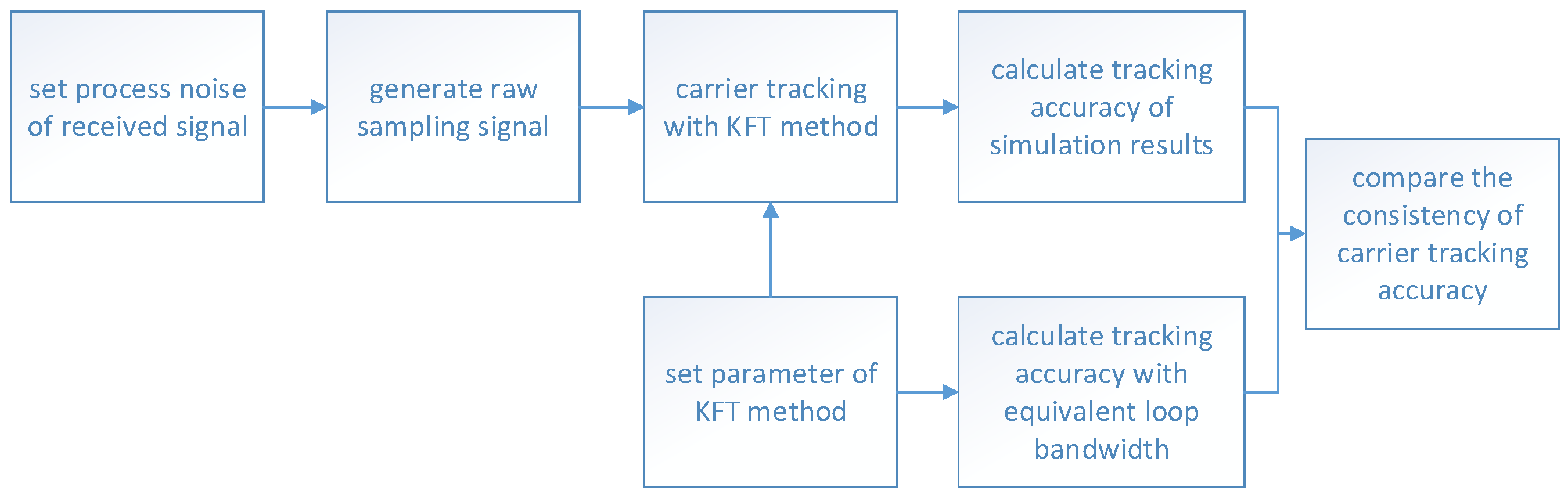
- Implement the KFT method in Figure 1 is for tracking.
- Record the stand deviation of carrier phase error per millisecond as tracking accuracy.
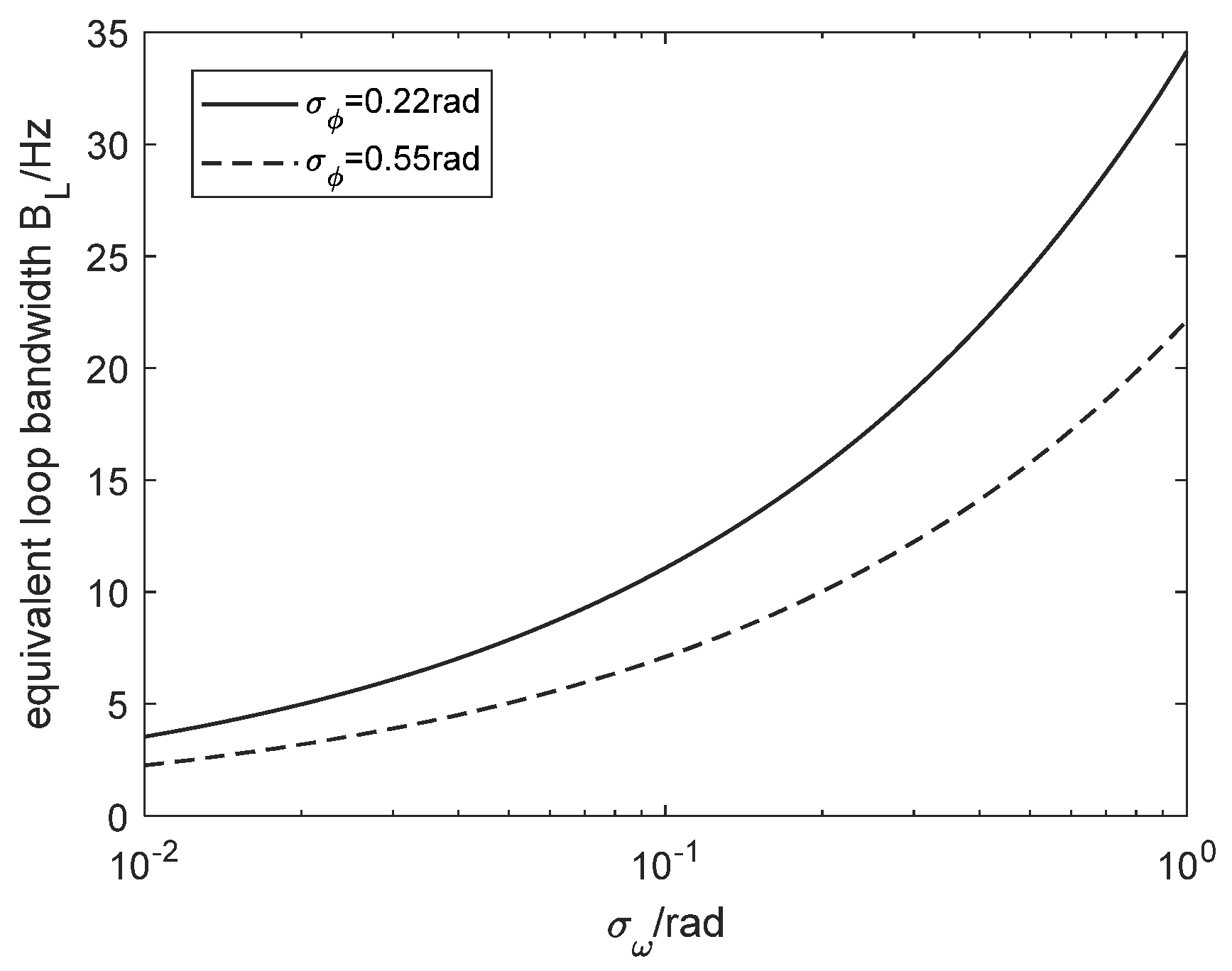
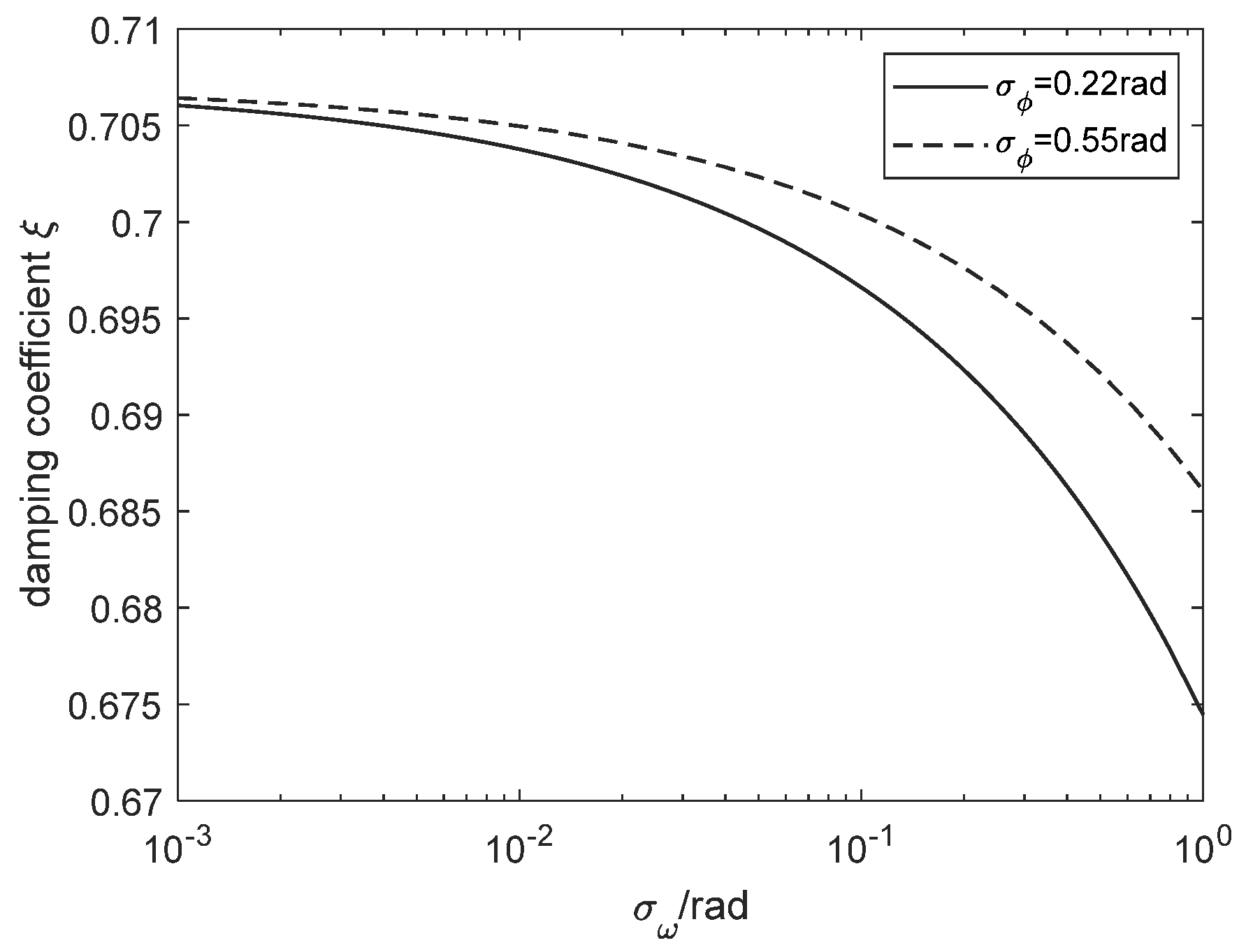
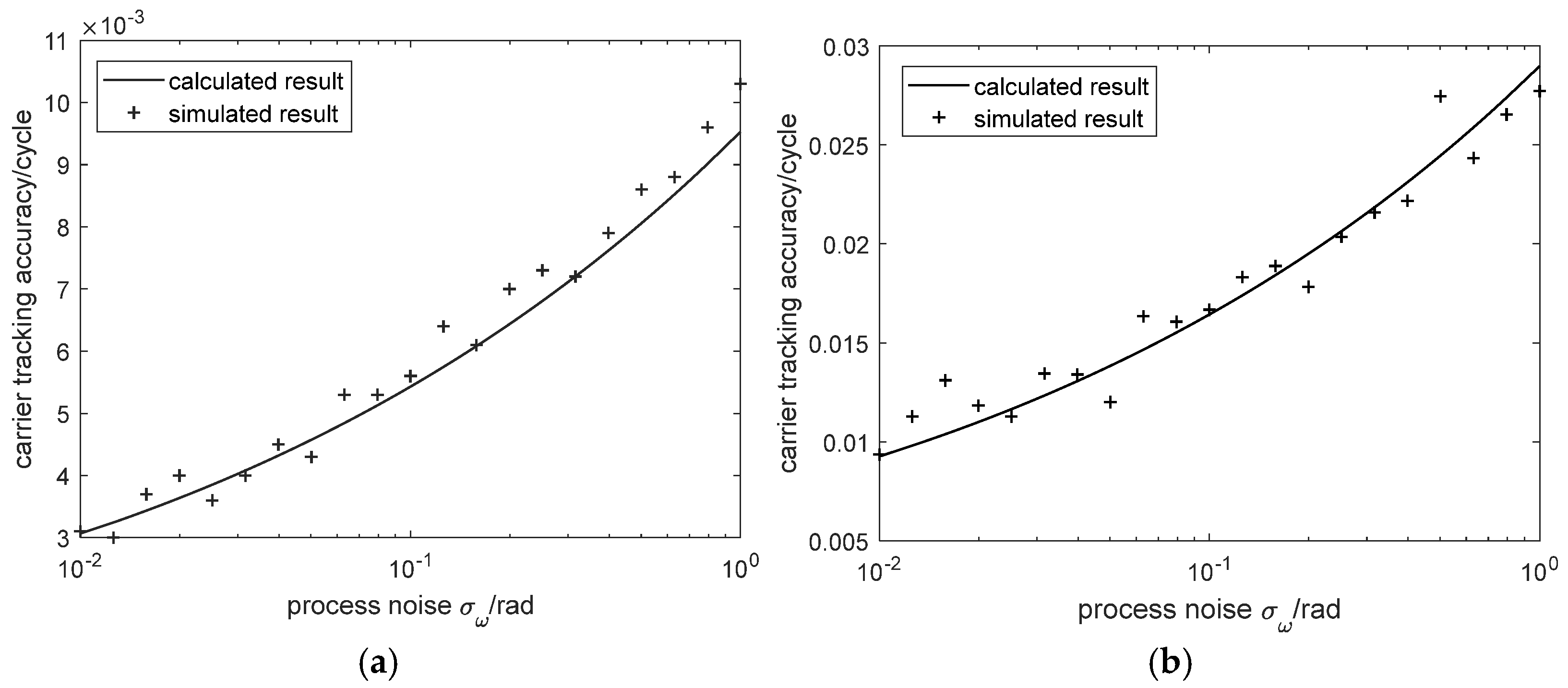
- Calculate equivalent loop bandwidth and tracking accuracy according to (26) and (27).
- Compare simulated and calculated results to validate the analytical expression.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, Y.; Zhou, X.X.; Cheng, G.J. High dynamic carrier tracking technology in frequency hopping systems. Syst. Eng. Electron. 2022, 44, 677–683. [Google Scholar]
- Feng, X.; Zhang, T.S.; Niu, X.; Pany, T.; Liu, J. Improving GNSS carrier phase tracking using a long coherent integration architecture. GPS Solut. 2023, 27, 37. [Google Scholar] [CrossRef]
- Cui, S.Q.; An, J.P.; Wang, A.H. Kalman filter used for carrier tracking algorithm based on matched maneuvering target model. Syst. Eng. Electron. 2014, 36, 376–381. [Google Scholar]
- Gardner, F.M. Phaselock Techniques; People’s Posts and Telecommunications Press: Beijing, China, 2007. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Signal Processing; Electronic Industry Press: Beijing, China, 2023. [Google Scholar]
- Cheng, Y.; Chang, Q. A Coarse-to-Fine Adaptive Kalman Filter for Weak GNSS Signals Carrier Tracking. IEEE Commun. Lett. 2019, 23, 2348–2352. [Google Scholar] [CrossRef]
- Xu, J.W.; Yang, R.; Tang, Z.P.; Zhan, X.; Morton, Y.J. Deeply-Coupled GNSS Dual-Band Collaborative Tracking Using the Extended Strobe Correlator. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 6164–6178. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhang, S.K.; Wang, X.Y.; Wang, H.; Yang, H. Kalman Filter with Adaptive Covariance Estimation for Carrier Tracking Under Weak Signals and Dynamic Conditions. Electronics 2024, 13, 1288. [Google Scholar] [CrossRef]
- Yu, X.Y.; Gao, T.; Sun, G.F.; Tang, X.; Ni, S. Weak GNSS signal tracking algorithm based on variable dimension Kalman filter. J. Natl. Univ. Def. Technol. 2015, 37, 56–60. [Google Scholar]
- Gómez, M.; Solera-Rico, A.; Valero, E.; Lázaro, J.A.; Fernández-Prades, C. Enhancing GNSS Receiver Performance with Software-Defined Vector Carrier Tracking for Rocket Launching. Results Eng. 2023, 19, 101310. [Google Scholar] [CrossRef]
- Shen, F.; He, R.; Lv, D.; Zhou, Y. Kalman Filter Based High Dynamic GPS Carrier Tracking Loop. J. Astronaut. 2012, 8, 1041–1047. [Google Scholar]
- Wang, X.Y.; Chen, X.Y. Strong tracking Kalman filter loop applied for high dynamic GPS signals. J. Southeast Univ. (Nat. Sci. Ed.) 2014, 44, 946–951. [Google Scholar]
- Sun, P.Y.; Tang, X.M.; Huang, Y.B.; Sun, G. Wavelet de-noising Kalman filter-based Global Navigation Satellite System carrier tracking in the presence of ionospheric scintillation. IET Radar Sonar Navig. 2017, 11, 226–234. [Google Scholar] [CrossRef]
- Melania, S.; Andreotti, M.; Aquino, M.; Dodson, A. Tuning a Kalman filter carrier tracking algorithm in the presence of ionospheric scintillation. GPS Solut. 2017, 21, 1149–1160. [Google Scholar]
- Locubiche-Serra, S.; Seco-Granados, G.; López-Salcedo, J.A. Performance assessment of a low-complexity autoregressive Kalman filter for GNSS carrier tracking using real scintillation time series. GPS Solut. 2022, 26, 17. [Google Scholar] [CrossRef]
- Zhao, W.X.; Khanafseh, S.; Pervan, B. Adaptive Multiple-Model Kalman Filter for GNSS Carrier Phase and Frequency Estimation Through Wideband Interference. J. Inst. Navig. 2024, 71, 646. [Google Scholar] [CrossRef]
- Hu, Y.; Wu, L.J.; Lou, N.Y.; Liu, W. A Robust Vector-Tracking Loop Based on KF and RTS Smoothing for Shipborne Navigation. J. Mar. Sci. Eng. 2024, 12, 747. [Google Scholar] [CrossRef]
- Gao, N.; Chen, X.Y.; Yan, Z.; Jiao, Z. Performance Enhancement and Evaluation of a Vector Tracking Receiver Using Adaptive Tracking Loops. Remote Sens. 2024, 16, 1836. [Google Scholar] [CrossRef]
- Sayed, P.T.; Danilo, P.M. A quaternion frequency estimator for three-phase power systems. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), South Brisbane, Australia, 19–24 April 2015. [Google Scholar]
- Tang, M.; Cai, S.; Lau, V.K.N. Remote State Estimation with Asynchronous Mission-Critical IoT Sensors. IEEE J. Sel. Areas Commun. 2020, 99, 835–850. [Google Scholar] [CrossRef]
- Gabr, K.; Abdelkader, M.; Jarraya, I.; AlMusalami, A.; Koubaa, A. SMART-TRACK: A Novel Kalman Filter-Guided Sensor Fusion for Robust UAV Object Tracking in Dynamic Environments. IEEE Sens. J. 2025, 25, 3086–3097. [Google Scholar]
- Xu, D.; Wang, B.; Zhang, L.; Chen, Z. A New Adaptive High-Degree Unscented Kalman Filter with Unknown Process Noise. Electronics 2022, 11, 1863. [Google Scholar] [CrossRef]
- Tang, K.H.; Wu, C.F.; Du, L.; He, X. Experimental study and design on high dynamic GNSS receiver using adaptive optimal bandwidth for carrier tracking loop. J. Chin. Inert. Technol. 2014, 12, 498–503. [Google Scholar]
- Jin, L.; Lv, P.; Cui, X.; Lu, M.; Feng, Z. Adaptive Kalman tracking algorithm for new generation GNSS signals. J. Tsinghua Univ. (Sci. Technol.) 2012, 52, 1249–1254. [Google Scholar]
- Won, J.; Pany, T.; Eissfeller, B. Characteristics of Kalman filters for GNSS signal tracking loop. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3671–3681. [Google Scholar] [CrossRef]
- Niu, X.J.; Li, B.; Ziedan, N.I.; Guo, W.; Liu, J. Analytical and simulation-based comparison between traditional and Kalman filter-based phase-locked loops. GPS Solut. 2017, 21, 123–135. [Google Scholar] [CrossRef]
- Bidon, S.; Roche, S. On the equivalence between steady-state Kalman filter and DPLL. Signal Process. 2024, 224, 109591. [Google Scholar] [CrossRef]
- Qian, Y.; Cui, X.W.; Lu, M.Q. Steady-State Performance of Kalman Filter for DPLL. Tsinghua Sci. Technol. 2009, 14, 470–473. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Signal type | BDS B1I |
| Sampling frequency | 10 MHz |
| Simulation duration | 10 s |
| Carrier-to-noise ratio of received signal | 40 dBHz, 30 dBHz |
| Loop update period | 1 ms |
| Standard deviation of process noise | rad/Hz |
| Initial covariance | |
| Signal length | 10 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Shi, J.; Xu, K. Equivalent Loop Bandwidth of Kalman Filter-Based Tracking Method. Electronics 2025, 14, 2588. https://doi.org/10.3390/electronics14132588
Li Y, Shi J, Xu K. Equivalent Loop Bandwidth of Kalman Filter-Based Tracking Method. Electronics. 2025; 14(13):2588. https://doi.org/10.3390/electronics14132588
Chicago/Turabian StyleLi, Ye, Jinjing Shi, and Konglian Xu. 2025. "Equivalent Loop Bandwidth of Kalman Filter-Based Tracking Method" Electronics 14, no. 13: 2588. https://doi.org/10.3390/electronics14132588
APA StyleLi, Y., Shi, J., & Xu, K. (2025). Equivalent Loop Bandwidth of Kalman Filter-Based Tracking Method. Electronics, 14(13), 2588. https://doi.org/10.3390/electronics14132588