1. Introduction
In recent years, the rapid advancement of technology has led to increasingly complex research problems, many of which are mathematically abstracted as high-dimensional search space optimization tasks. Traditional optimization algorithms encounter significant difficulties in solving such issues, such as failing to obtain optimal solutions or requiring excessively complex computational procedures that lead to intolerable time consumption. Consequently, conventional methods often fail to meet the demands of addressing these intricate optimization problems. In contrast, metaheuristic algorithms have emerged as powerful tools for tackling such challenges, owing to their exceptional ability to fulfill optimization requirements. As a class of high-level strategies for complex optimization problems, metaheuristic algorithms are domain-independent, exhibiting remarkable versatility and flexibility [
1]. They apply to issues with nonconvex, nondifferentiable, or multi-extremal search spaces, delivering satisfactory solutions within reasonable timeframes.
Furthermore, these algorithms require only a properly defined objective function, eliminate the need for gradient calculations, and can address optimization problems that lack analytical solutions. Their strengths extend to robust global search capabilities and the inherent ability to escape local optima. The design of metaheuristic algorithms is inspired by natural or physical phenomena, such as biological evolution, thermodynamic processes, collective behaviors of biological swarms, or social phenomena in human societies [
2]. The procedure for searching for optimal solutions follows these steps: first, randomly generating a population, then evaluating their fitness, and subsequently iteratively updating each individual according to specific strategies. Through this iterative refinement, the fitness of candidate solutions is progressively enhanced, ultimately converging toward near-optimal or optimal solutions.
Electricity, like water, is a vital resource for humanity. Stability issues in power system operations have been continuously studied to date [
3,
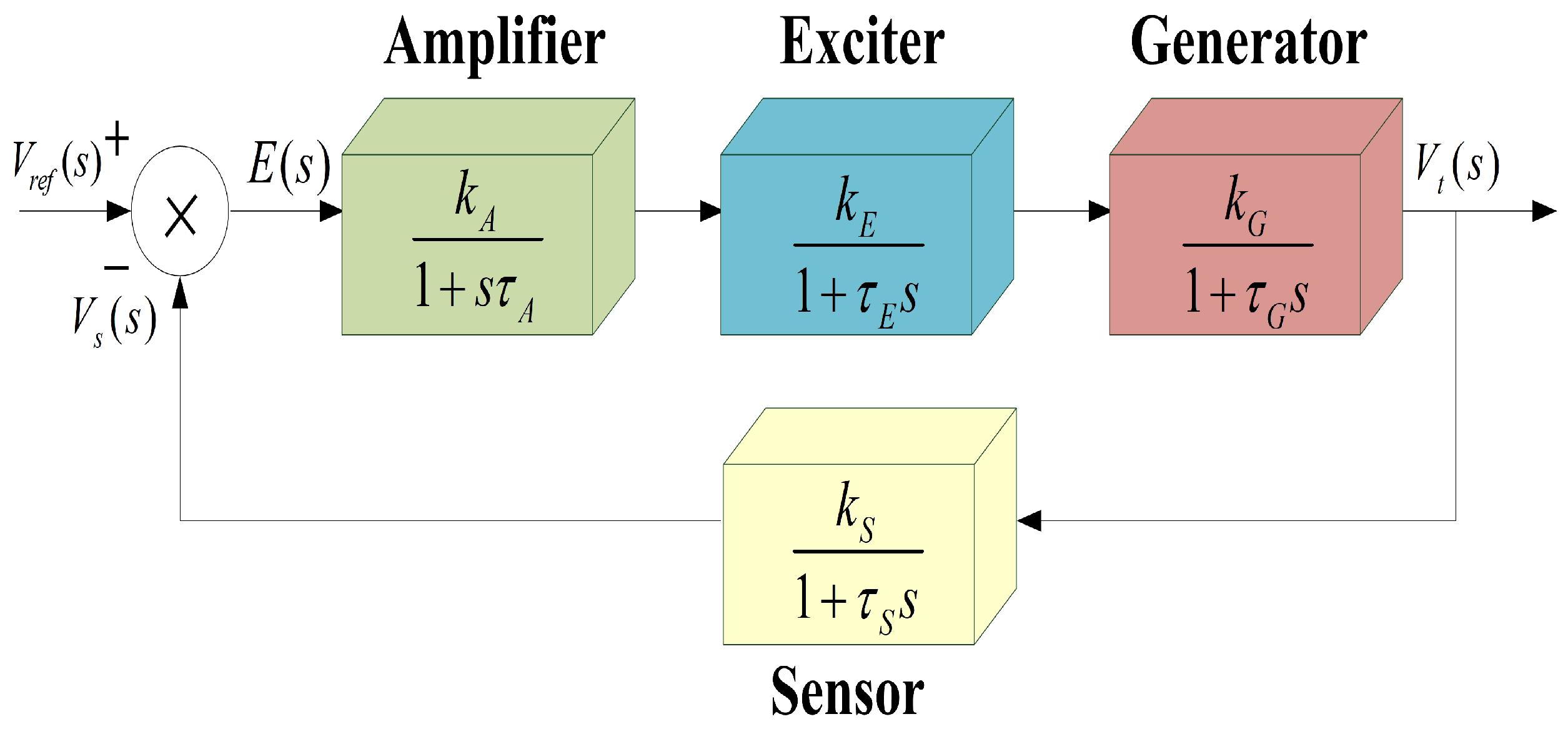
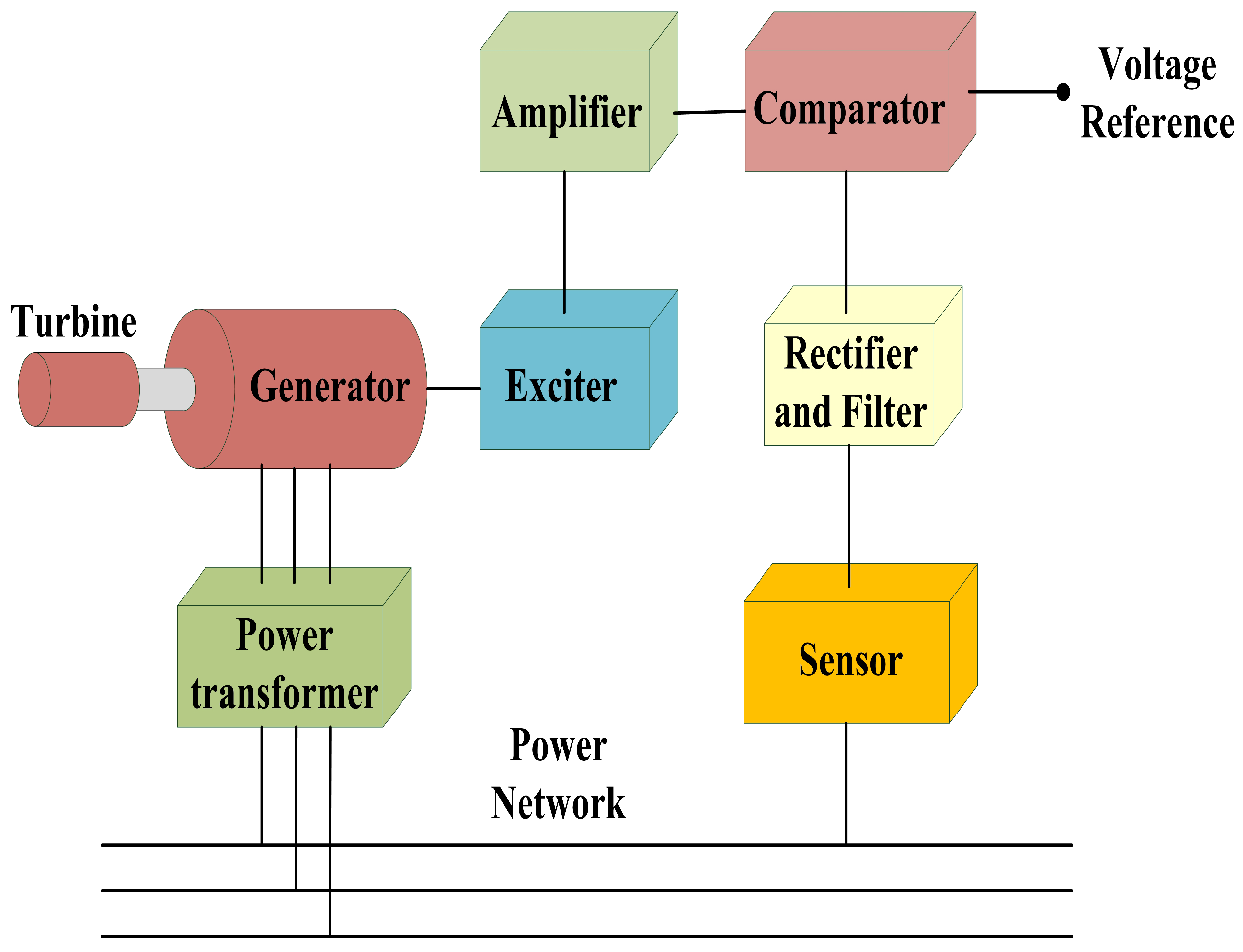
4]. The automatic voltage regulator (AVR) is the most critical control device in power systems, utilized to maintain the terminal voltage of synchronous generators around a fixed value [
5]. For equipment in power systems, stabilizing voltage and frequency within specific preset ranges is particularly essential, as deviations from preset values can lead to shortened equipment lifespans and significant performance degradation. However, numerous factors influence power system operations, including generator characteristics, control device responses, and load configurations. Synchronous AC generators, the primary devices for bulk power generation in power systems, are highly susceptible to oscillations caused by load variations. The AVR ensures the generator’s terminal voltage remains stable even during drastic load changes, highlighting the critical importance of the AVR in maintaining system integrity. According to prior studies, integrating control devices into the AVR control loop has been extensively explored, with various control devices proposed to substantially enhance AVR system performance. Among these, the PID controller is acknowledged as the most widely adopted and effective control solution.
The PID controller has become a widely used control solution due to its simple structure and excellent control performance. It requires the tuning of three parameters, i.e., proportional, integral, and derivative gains, while several extensions of PID controllers have been developed. In 1999, Podlubny [
6] proposed the fractional-order PID (FOPID) controller, which introduced two additional tuning parameters,
, and
, compared to the standard PID prototype. Furthermore, the PIDD
2 controller was developed by adding a second-order derivative term into the conventional PID structure; this modification introduces an additional tuning parameter
to specifically govern the weighting of the second-order derivative component. In recent years, researchers have explored combining the FOPID and PIDD
2 controllers, resulting in a hybrid FOPIDD
2 controller, to achieve superior control performance. This advanced controller involves six tuning parameters, making it the most computationally demanding variant among all PID-based control architectures during the parameter tuning process.
Tuning the parameters of PID controllers remains a challenging task in industrial automation, particularly for systems with time-varying dynamics or significant nonlinearities, necessitating advanced optimization frameworks. To enhance the performance of AVR systems, numerous metaheuristic algorithms, including improved spotted hyena optimizer (ISHO) [
7], artificial ecosystem-based optimization (AEO) [
8], tree-seed algorithm (TSA) [
9], sine-cosine algorithm (SCA for PID) [
10], cuckoo search algorithm (CSA) [
11], slime mould algorithm (SMA) [
12], improved kidney-inspired algorithm (IKA) [
13], simulated annealing-manta ray foraging optimization algorithm (SA-MRFA) [
14], genetic algorithm (GA) [
15], particle swarm optimization (PSO) [
16], Archimedes optimization algorithm (AOA) [
17], Whale Optimization Algorithm (WOA) [
18], simulated annealing-gorilla troops optimization (SA-GTO) [
19], salp swarm optimization (SSO) [
20], gradient-based optimization (GBO) [
21], modified smoothed function algorithm (MSFA) [
22], sine-cosine algorithm (SCA for FOPID) [
23], chaotic yellow saddle goatfish algorithm (C-YSGA) [
24], ant lion optimizer (ALO) [
25], chaotic black widow optimization (ChBWO) [
26], multi-verse optimizer (MVO) [
27], reptile search algorithm (RSA) [
28], Henry gas solubility optimization (HGSO) [
29], equilibrium optimizer (EO) [
30], equilibrium optimizer-evaporation rate water cycle algorithm (EO-ERWCA) [
31], nonlinear sine cosine algorithm (NSCA) [
32], grey wolf optimization (GWO) [
33], symbiotic organisms search (SOS) [
34], coyote optimization algorithm (COA) [
35], Cat Swarm Optimization (SCSO) [
36], and improved coati optimization algorithm (ICOA) [
37] have been employed to optimize PID controller parameters.
Another key to improving controller performance lies in selecting an objective function compatible with the optimization algorithm during the parameter optimization process. In previous studies, several objective functions have been designed and utilized. Conventional objective functions include: Integral of Time-weighted Absolute Error (ITAE), Integral of Time-weighted Squared Error (ITSE), Integral of Absolute Error (IAE), and Integral of Squared Error (ISE). Some objective functions incorporate time-domain performance metrics of controllers, such as overshoot, rise time, settling time, and steady-state error, with Zwee Lee Gaing’s (ZLG) being the most widely adopted. Others combine traditional objective functions with those embedding time-domain metrics to achieve enhanced control performance. The choice of the objective function is typically determined through extensive numerical simulation experiments and is heavily dependent on the chosen optimization algorithm. Further details on the application of the majority of algorithms to optimize PID-controlled AVR systems are summarized in
Table 1.
As shown in
Table 1, these studies focus on combining different algorithms, types of PID controllers, and objective functions to optimize the performance of AVR systems. Among them, PID variants constitute more than half of the cases, with a predominant emphasis on fractional-order PID and PIDD
2 controllers. The ZLG method is the most frequently adopted objective function, followed by ITAE. Additionally, hybrid metaheuristic algorithms have begun to emerge in recent research, such as SA–MRFO, EO-ERWCA, and SA–GTO.
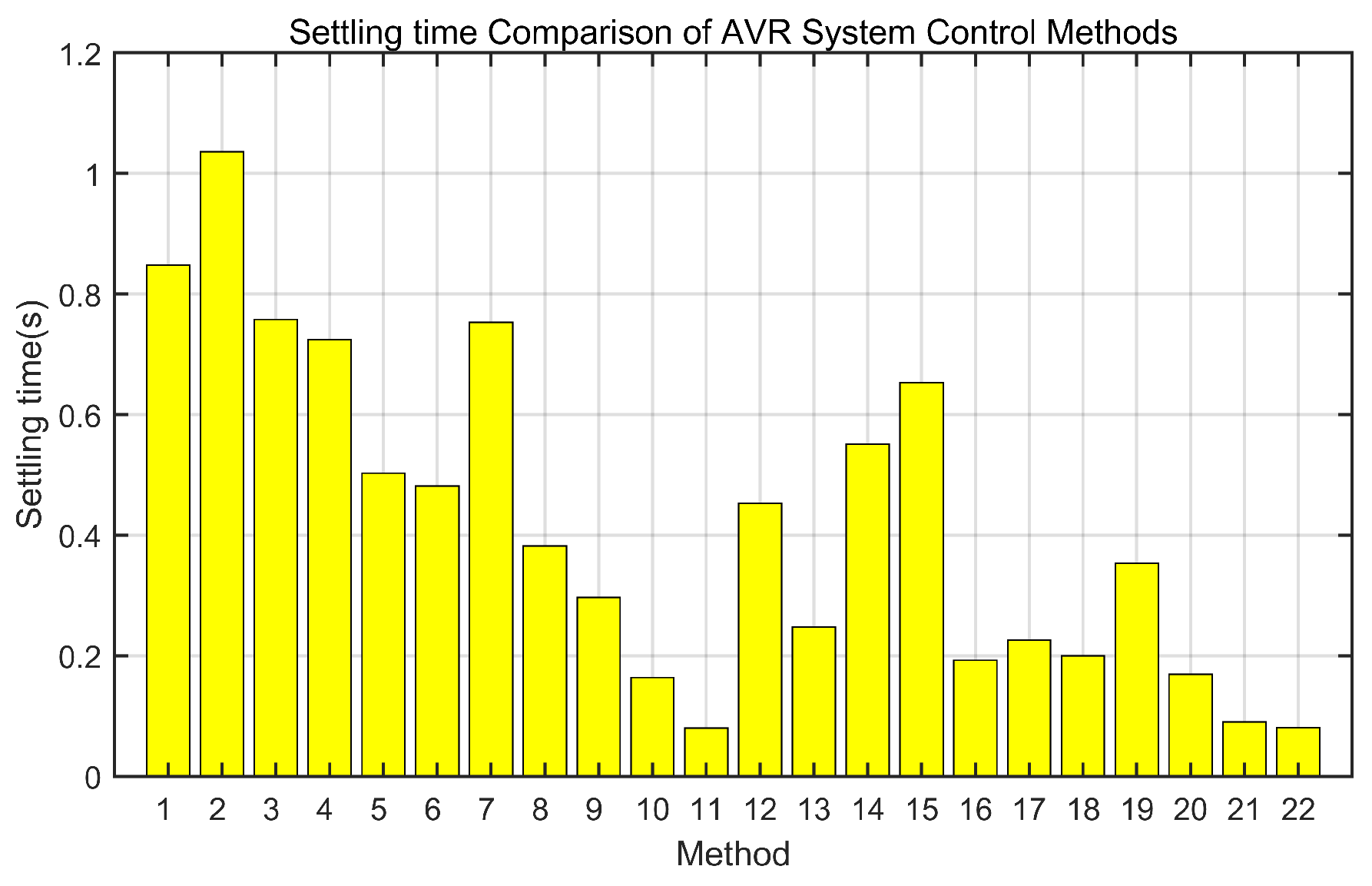
Figure 1,
Figure 2 and
Figure 3 present comparative evaluations of the overshoot, rise time, and settling time characteristics produced by the AVR system control methods enumerated in
Table 1, respectively.
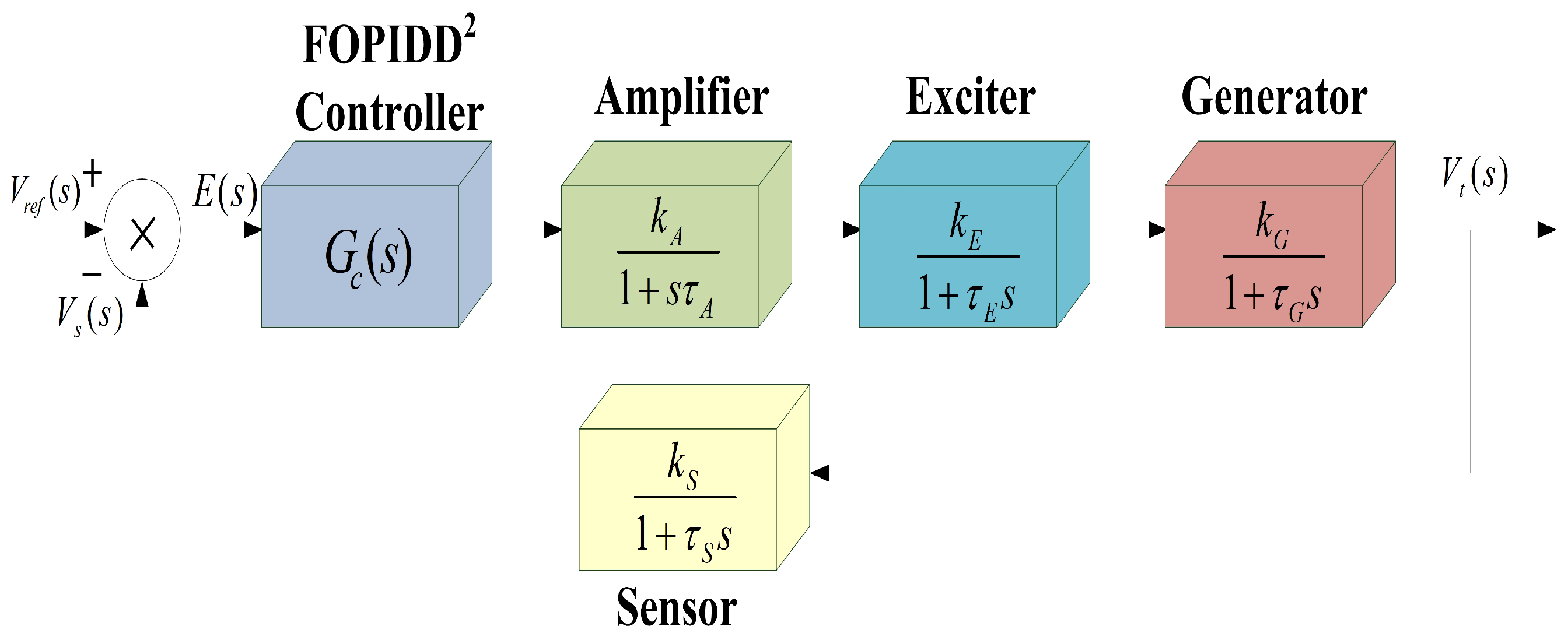
A review of the literature reveals that using novel metaheuristic algorithms, advanced controllers, and more complex objective functions can significantly enhance the performance and robustness of PID-controlled AVR systems. However, this entails an increase in both the number of tuning parameters and computational complexity. Furthermore, few studies have provided a comprehensive analysis of the controller’s effectiveness across multiple performance dimensions. To explore superior control efficacy, this study first integrates the Black-winged kite algorithm and Whale Optimization Algorithm into a hybrid Black-winged kite Optimization Algorithm. The Whale Optimization Algorithm is renowned for its strong local exploitation capabilities, bubble-net attacking mechanism, and rapid convergence speed. However, it is prone to falling into local optima. In contrast, the Black-winged Kite Algorithm excels in global exploration, enabling it to effectively avoid local optima traps. This hybrid algorithm thoroughly explores the potential search space by partitioning the population in each generation and iteratively applying both optimization strategies, thereby preventing premature convergence to local optima. Subsequently, the proposed BWOA is applied to tune the parameters of a fractional-order FOPIDD
2 controller, where a novel objective function is adopted during the optimization process. Finally, to comprehensively demonstrate the control capabilities of the proposed BWOA-FOPIDD
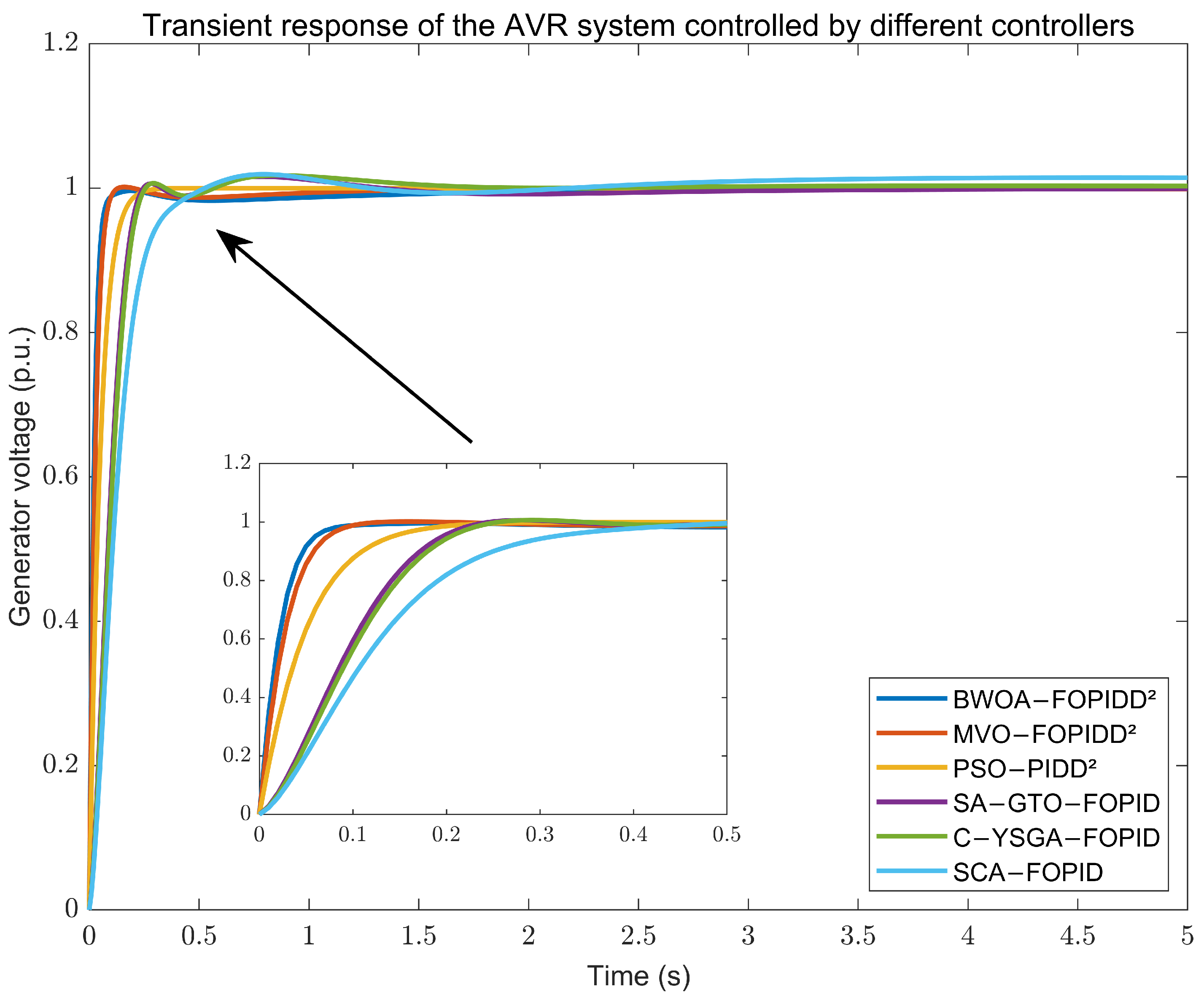
2 controller, the AVR system governed by this controller is rigorously evaluated in terms of transient response, frequency-domain response, trajectory tracking, parameter uncertainty, and disturbance rejection. Comparative analyses are conducted against controllers optimized by other algorithms, including PSO [
16], SCA [
23], C-YSGA [
24], MVO [
27], and SA-GTO [
19], to validate its superior performance.
Therefore, the main contributions of this study are as follows:
1. Proposing a hybrid Black-winged Kite Optimization Algorithm (BWOA) by integrating the Black-winged Kite algorithm and Whale Optimization Algorithm.
2. Applying the BWOA to the parameter tuning of a FOPIDD2 controller.
3. Conducting a comprehensive analysis of the performance and robustness of the BWOA-FOPIDD2 controller, with comparisons to results from the existing literature.
The remaining sections of this paper are organized as follows.
Section 2 briefly introduces the AVR system, conventional PID controllers, and their various modifications.
Section 3 elaborates on the design of BWOA.
Section 4 describes the process of optimizing the proposed controller using BWOA proposed in this study.
Section 5 provides a detailed analysis of all numerical simulation results and comparisons with other controllers. Finally, the conclusion is presented in
Section 6.
4. Problem Formulation
This paper aims to utilize the Black-winged Kite Algorithm to determine the parameters of the FOPIDD2 controller for an AVR system. It is crucial to explore the combination of the research algorithm, objective function, type of PID controller, and the controlled object to achieve superior results. Therefore, this section begins by delineating the objective function used in this study. Commonly utilized metrics for assessing controller performance encompass IAE, ISE, ITAE, ITSE, and ZLG, each with its applicable scenarios, merits, and demerits.
To determine the optimal parameters of the controller using the algorithm proposed in this paper, a novel objective function is used, which is a combination of ITAE and ZLG. The expression for this objective function is as follows:
where
X is a vector composed of all the parameters of the controller, which means
,
represents the termination time of the simulation experiment. OV is the overshoot,
is the steady-state error,
is the settling time,
is the rise time, and
is a weighting factor, typically ranging between 0.5 and 1.5. When the value of
exceeds 0.7, the overshoot and steady-state error are reduced; conversely, the rise time and settling time decrease [
40]. Based on extensive numerical simulations,
is set to 0.98 in this study.
Thus, the tuning of the proposed controller is formulated as a constrained optimization problem, which is mathematically expressed as follows:
where the
and
are the lower and upper bounds of the decision variables in the constrained optimization problem.
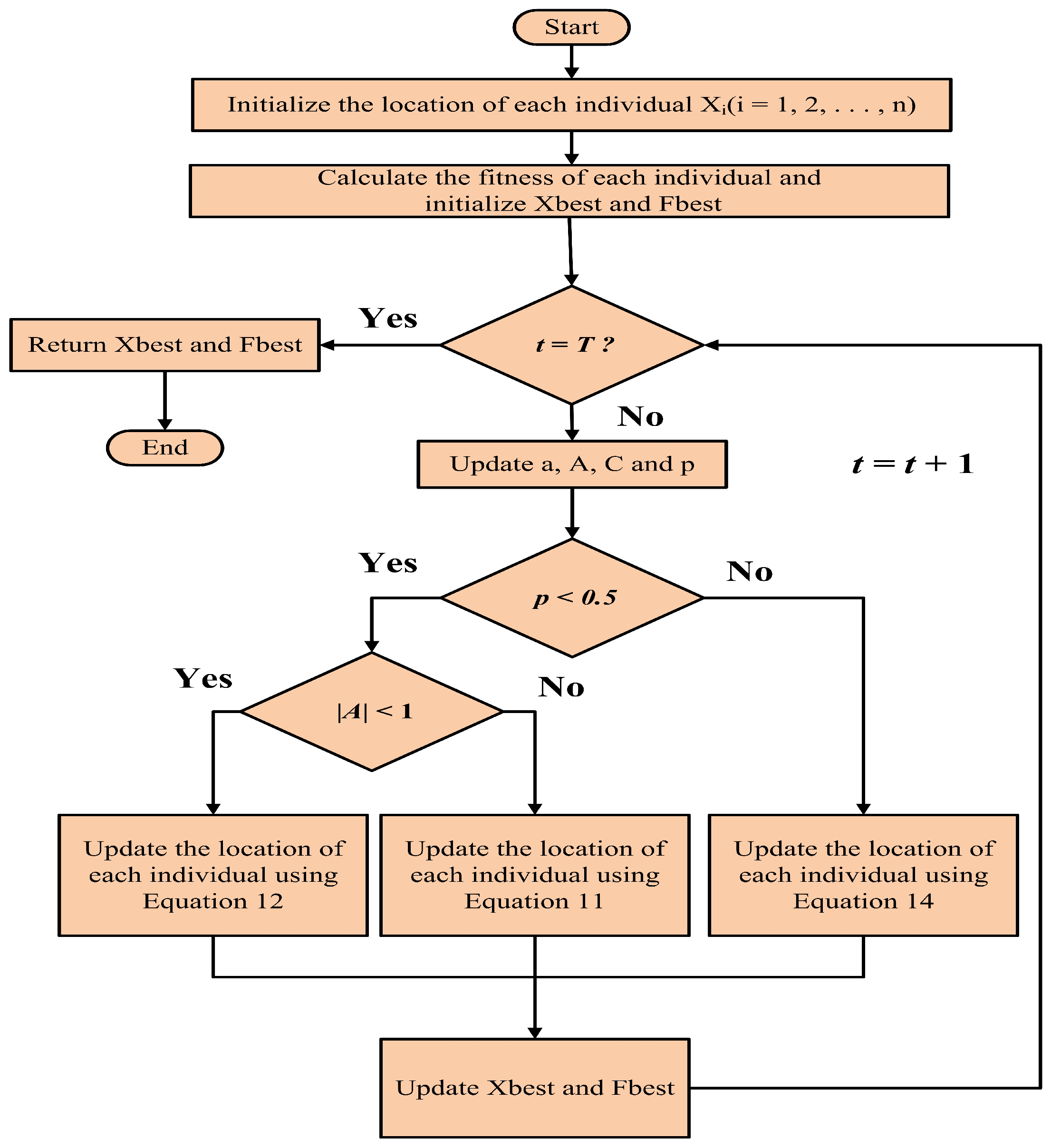
A detailed flowchart illustrating the application of the BWOA to optimize the performance of the AVR system is presented in
Figure 10.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}