
A Conflict Resolution Approach for Multiple Unmanned Aerial Vehicles


Abstract
1. Introduction
2. Related Work
3. The Proposed Conflict Resolution Approach
3.1. Conflict Detection Phase
- First, B estimates the time of closest approach ():
- If , then the two UAVs are traveling away from each other, and no future conflict is predicted.
- Otherwise, if , then the two UAVs are traveling toward each other and expected to reach their closest point.
- If , then no future conflict is predicted.
- If , then a conflict is predicted within the period ().
- If , then both UAVs are at the same distance of separation and will be zero.
- If , then exists and must be calculated.
- If , then conflict is registered, and alert is raised, conflict is registered, and our conflict resolution approach is invoked to resolve the conflict.
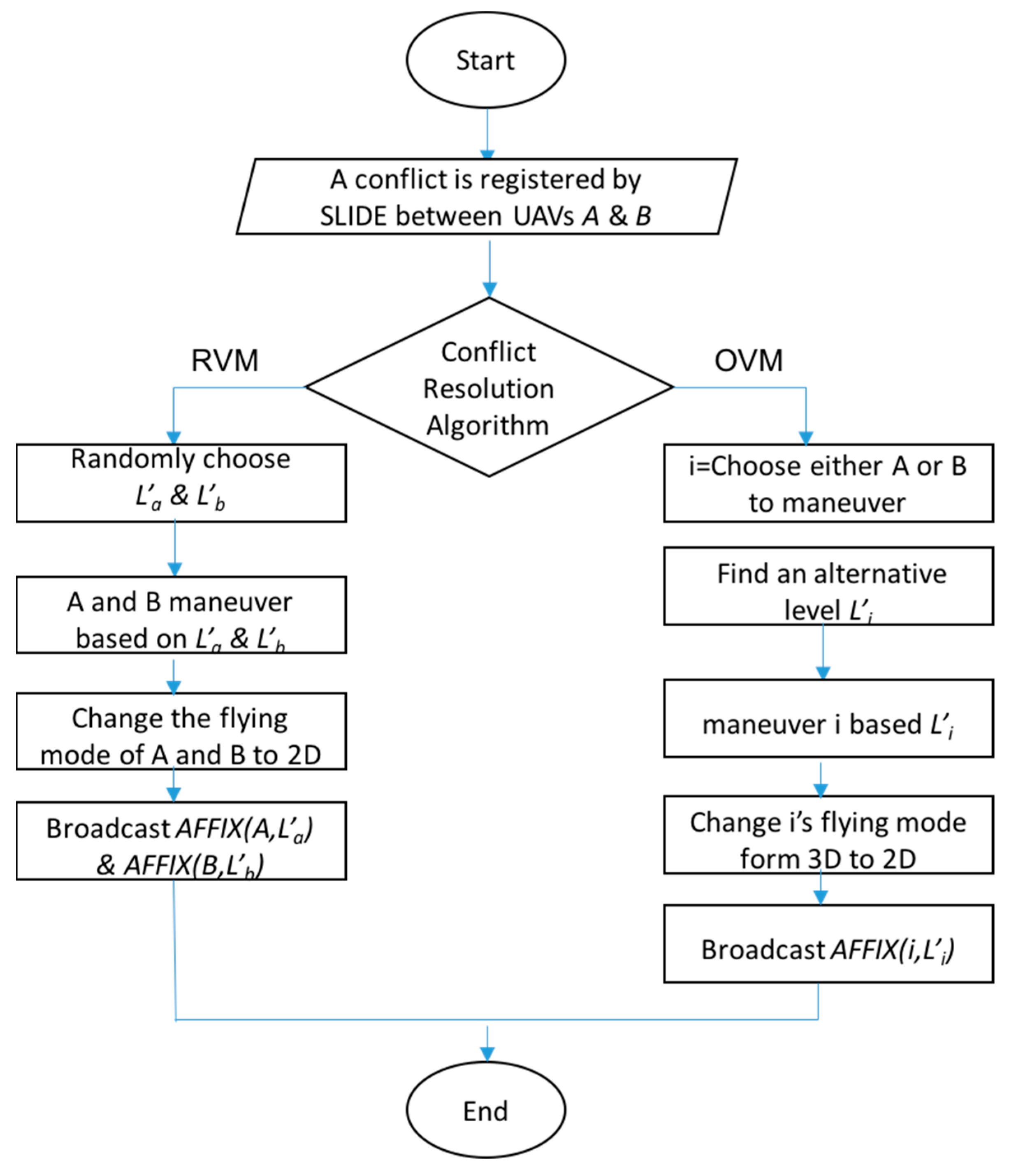
3.2. Conflict Resolution Phase
- -
- is the position vector;
- -
- is the velocity vector;
- -
- is the radius of the protected zone;
- -
- is a mobility mode indicator.
3.2.1. Random-Based Vertical Maneuver (RVM) Algorithm
| Algorithm 1. Pseudocode of RVM algorithm |
| Input: movement indicator , , , conflict alert Output: random alternative level If conflict alert = 1 then If then If = 0 then randomly choose alternative level return End |
3.2.2. Occupancy-Based Vertical Maneuvering (OVM) Algorithm
| Algorithm 2. Pseudocode of OVM algorithm |
| Input: STATE messages of and , occupancy vectors O, O, , , conflict alert |
| Output: calling algorithm III for A or B, alternative level , AFFIX message. |
| If is not in 2D |
| If |
| Then can performs vertical maneuver |
| Find least-occupied and nearest level in |
| broadcast AFFIX (, ) |
| performs maneuver within |
| EndIf |
| ElseIf is not in 2D |
| Then can performs vertical maneuver |
| Find least-occupied and nearest level in |
| broadcast AFFIX (, ) |
| performs maneuver within |
| ElseIf both UAVs are in 2D, OVM reports that it cannot handle this conflict. |
| End |
4. Conflict Scenarios
4.1. Crossing vs. Heading Scenarios
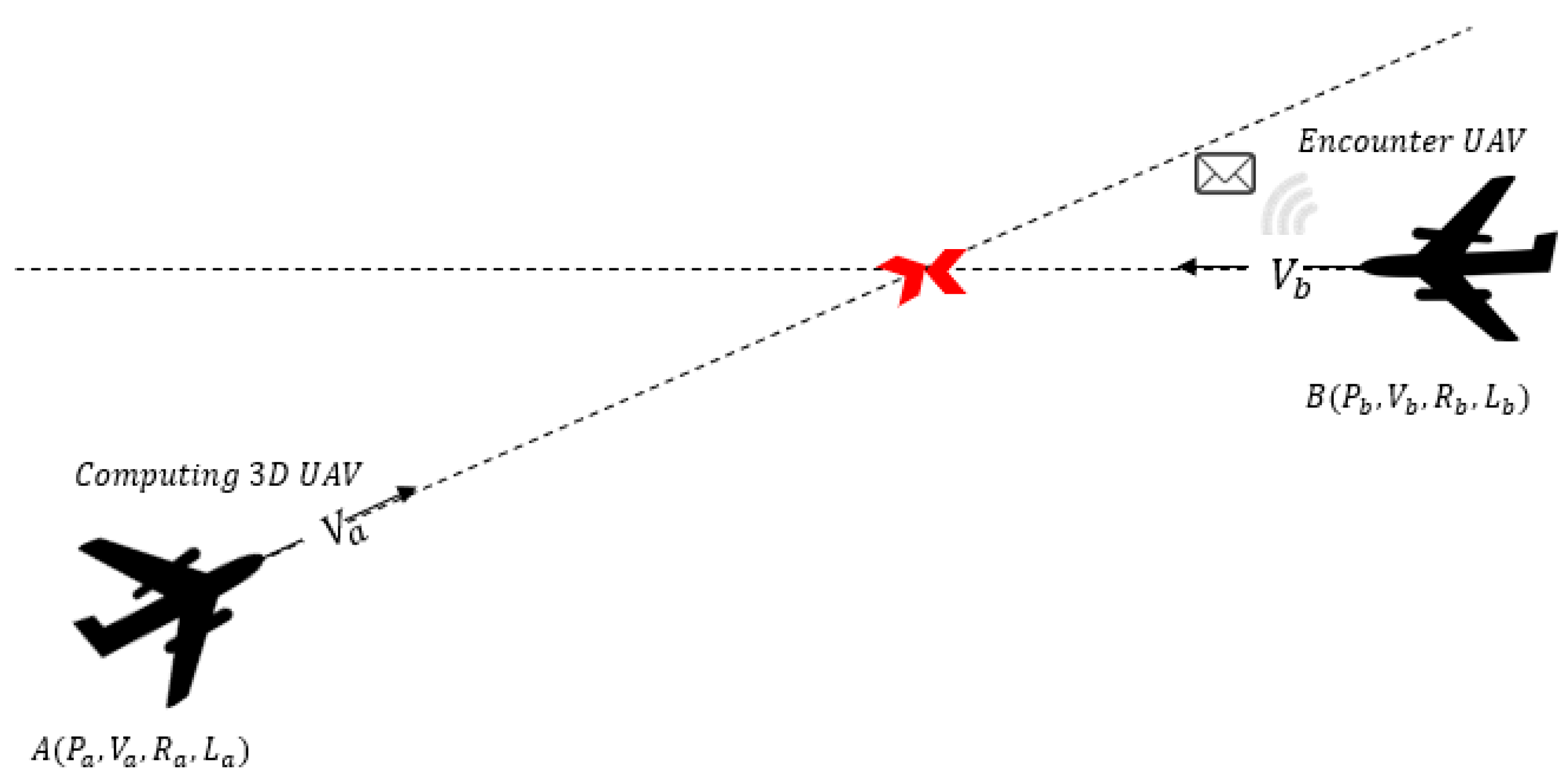
4.2. Conflicts Resolution in 3D–3D Scenarios
4.3. Conflicts Resolution in 3D–2D Scenarios
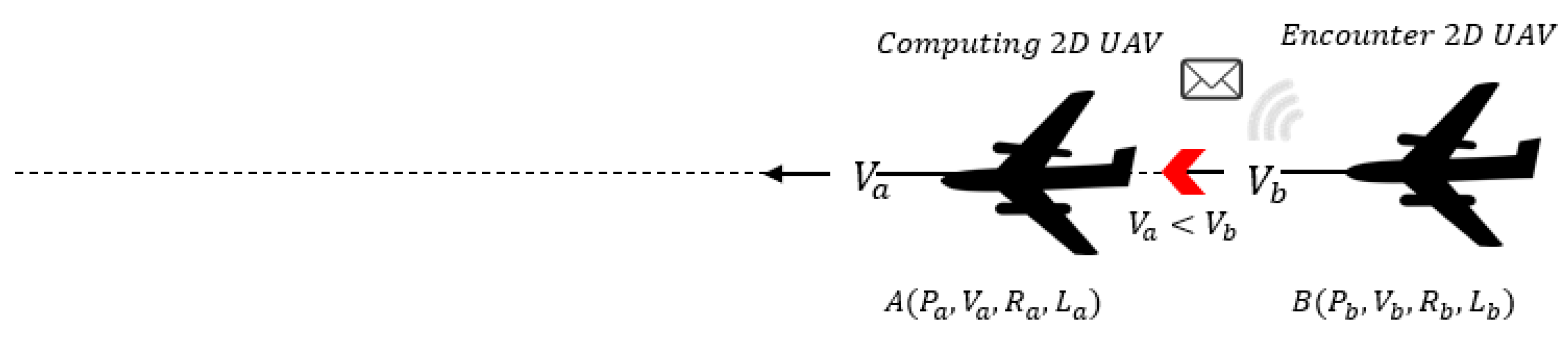
4.4. Resolving 2D–2D Conflicts
5. Performance Evaluation
5.1. Simulation Tool and Setup
5.2. Performance Measures
- No. of actual conflicts;
- No. of predicted conflicts;
- No. of accurate alarms;
- No. of missed alarms;
- No. of false alarms;
- Average maneuver time.
- Three-dimensional–three-dimensional conflicts: conflicts detected between two UAVs that are both in three-dimensional space.
- Three-dimensional–two-dimensional conflicts: conflicts detected between two UAVs one in three dimensions and the other in two dimensions.
- Two-dimensional–two-dimensional conflicts: conflicts detected between 2 UAVs in two-dimensional plane.
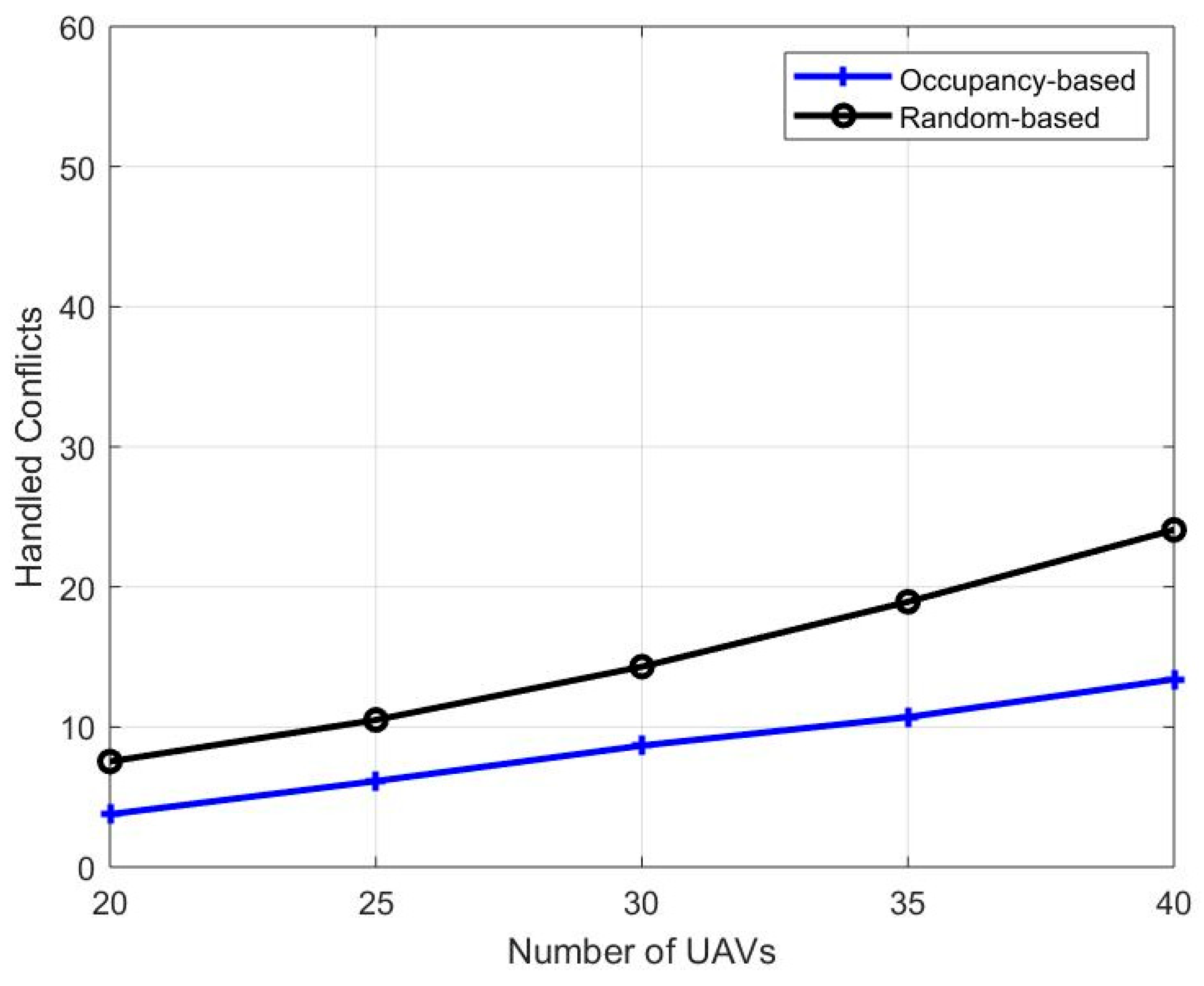
- Total handled conflicts: the portion of conflicts resolved by our approach.
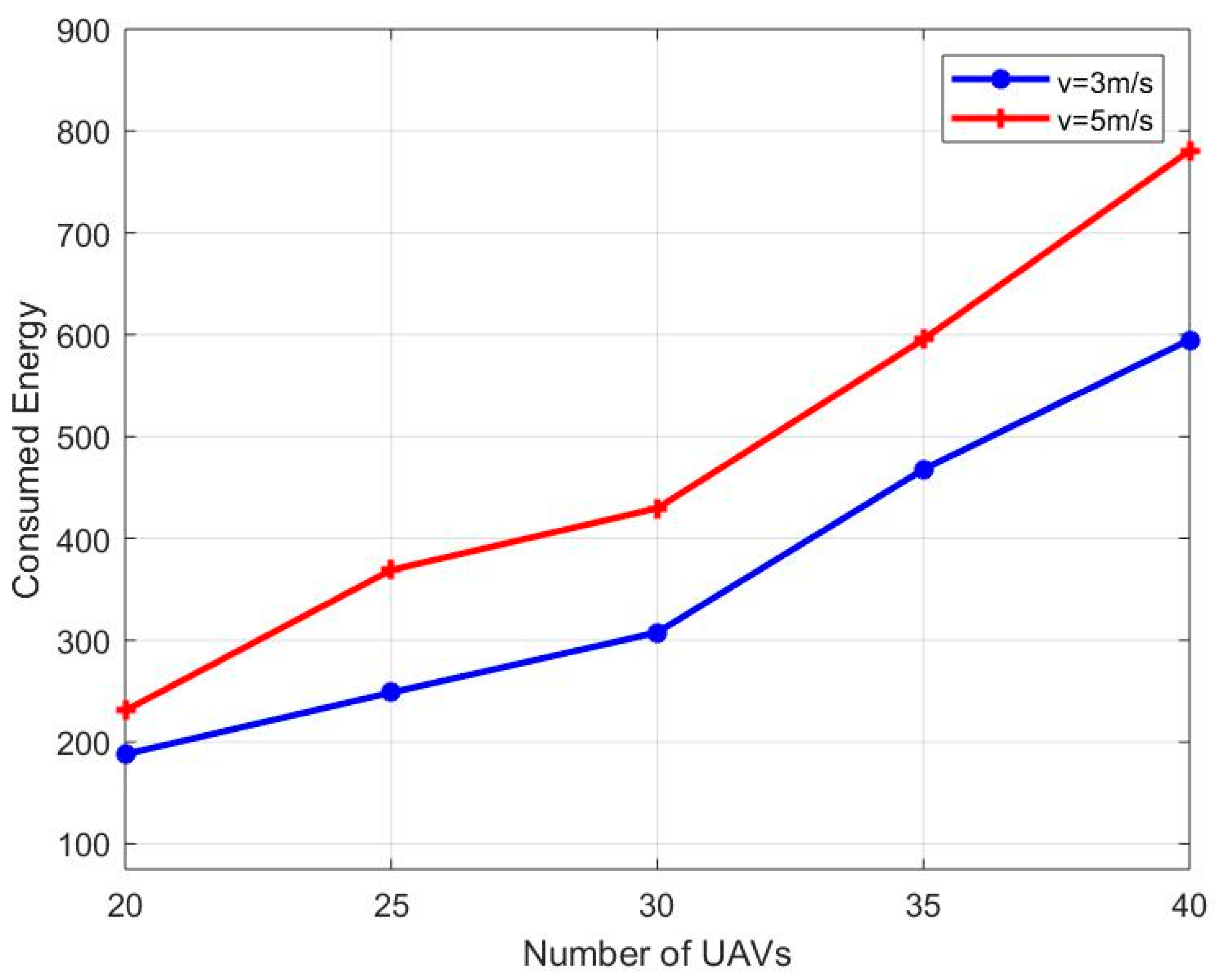
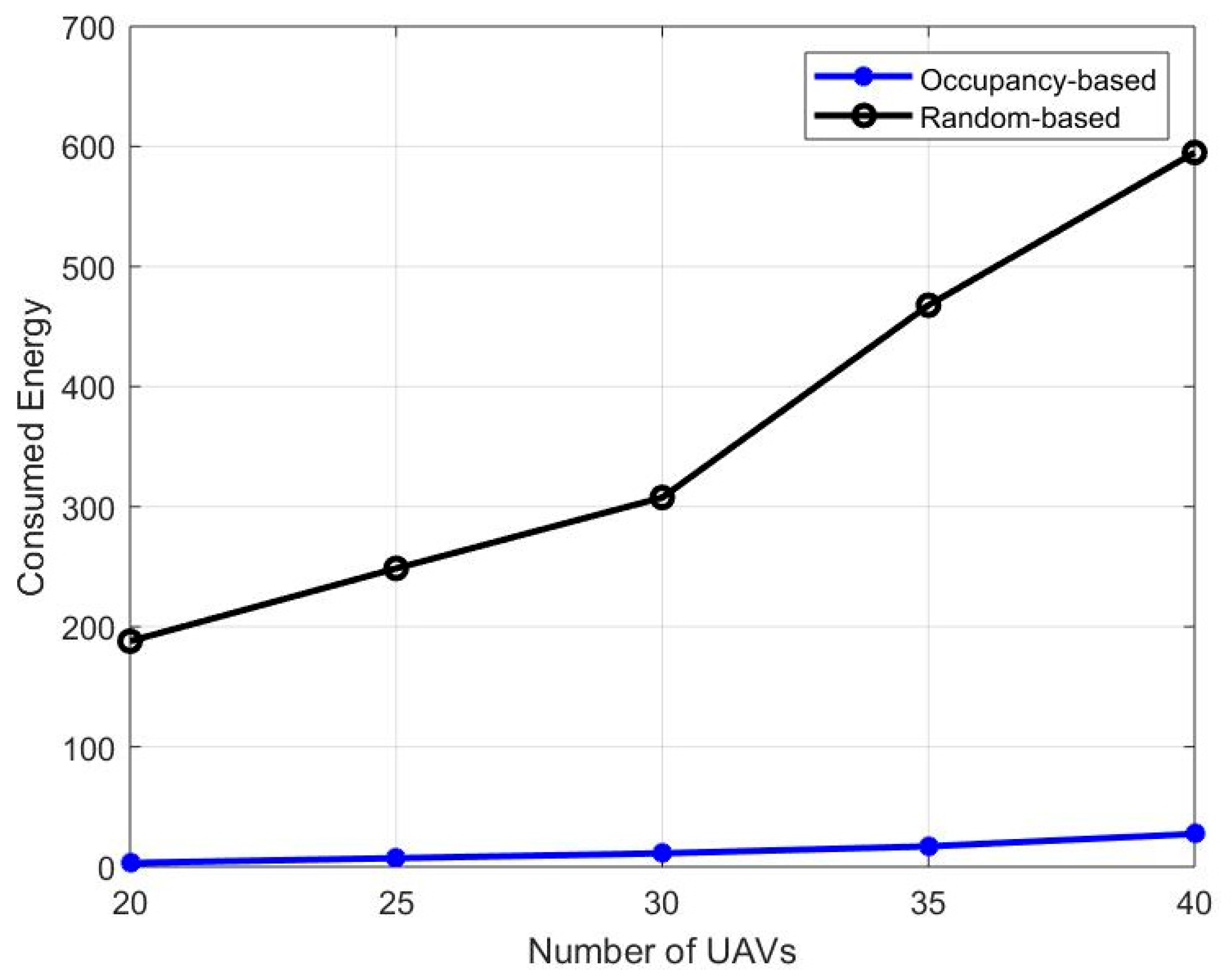
- Maneuvering energy consumption: the total amount of dissipated energy by all UAVs caused by vertical maneuvering as a result of encountering a conflict.
5.3. Simulation Results
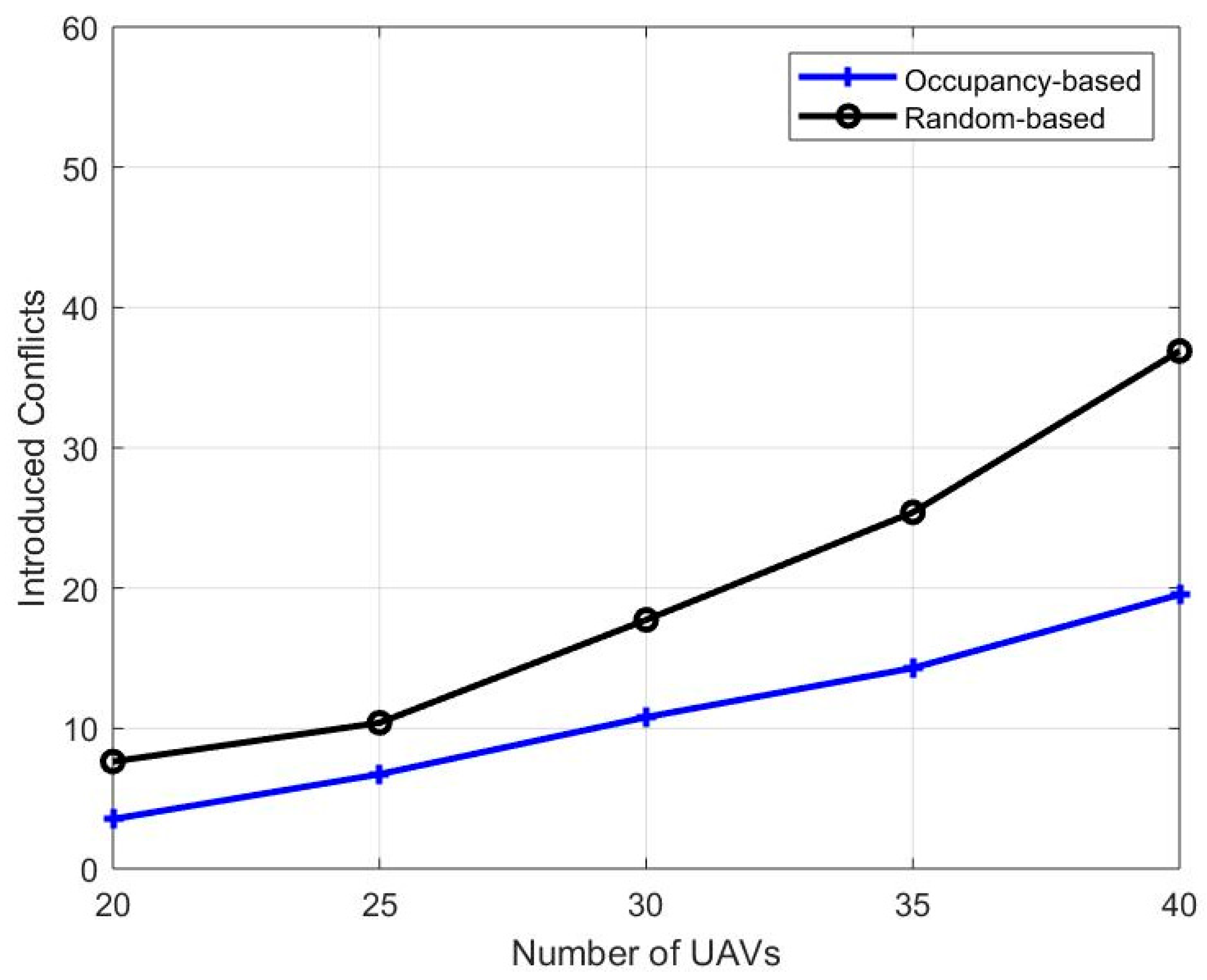
5.4. Performance Comparison of RVM and OVM
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhou, Z.; Zhao, G.; Jiang, Y.; Wu, Y.; Yang, J.; Meng, L. Research on UAV Conflict Detection and Resolution Based on Tensor Operation and Improved Differential Evolution Algorithm. Aerospace 2024, 11, 1008. [Google Scholar] [CrossRef]
- Lee, H.-I.; Shin, H.-S.; Tsourdos, A. A Probabilistic–Geometric Approach for UAV Detection and Avoidance Systems. Sensors 2022, 22, 9230. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; Wang, F.; Zhu, X.; Zhou, Z.; Tang, Y. Deep-Reinforcement-Learning-Based UAV Autonomous Navigation and Collision Avoidance in Unknown Environments. Chin. J. Aeronaut. 2024, 37, 237–257. [Google Scholar] [CrossRef]
- Mahjri, I.; Dhraief, A.; Belghith, A.; AlMogren, A. SLIDE: A Straight Line Conflict Detection and Alerting Algorithm for Multiple Unmanned Aerial Vehicles. IEEE Trans. Mob. Comput. 2018, 17, 5. [Google Scholar] [CrossRef]
- Alajlan, M.; Belghith, A. The Impact of Nonlinear Mobility Models on Straight Line Conflict Detection Algorithm for UAVs. Appl. Sci. 2022, 12, 12822. [Google Scholar] [CrossRef]
- Yang, J.; Yin, D.; Shen, L.; Cheng, Q.; Xie, X. Cooperative Deconflicting Heading Maneuvers Applied to Unmanned Aerial Vehicles in Non-Segregated Airspace. J. Intell. Robot. Syst. 2018, 92, 187–201. [Google Scholar] [CrossRef]
- Hamissi, A.; Dhraief, A.; Sliman, L. A Comprehensive Survey on Conflict Detection and Resolution in Unmanned Aircraft System Traffic Management. IEEE Trans. Intell. Transp. Syst. 2025, 26, 1395–1418. [Google Scholar] [CrossRef]
- Yang, J.; Yin, D.; Cheng, Q.; Xie, X. Two-Layer Optimization to Cooperative Conflict Detection and Resolution for UAVs. In Proceedings of the IEEE 18th International Conference on Intelligent Transportation Systems (ITSC), Gran Canaria, Spain, 15–18 September 2015; pp. 2072–2077. [Google Scholar] [CrossRef]
- Šišlák, D.; Volf, P.; Pěchouček, M. Agent-Based Cooperative Decentralized Airplane-Collision Avoidance. IEEE Trans. Intell. Transp. Syst. 2011, 12, 36–45. [Google Scholar] [CrossRef]
- Razzaq, S.; Xydeas, C.; Everett, M.E.; Mahmood, A.; Alquthami, T. Three-Dimensional UAV Routing with Deconfliction. IEEE Access 2018, 6, 21536–21551. [Google Scholar] [CrossRef]
- Kuchar, J.K.; Yang, L.C. A Review of Conflict Detection and Resolution Modeling Methods. IEEE Trans. Intell. Transp. Syst. 2000, 1, 179–189. [Google Scholar] [CrossRef]
- Bettstetter, C.; Pérez-Costa, X. Stochastic Properties of the Random Waypoint Mobility Model. Wirel. Netw. 2004, 10, 555–567. [Google Scholar] [CrossRef]
- Isaacson, D.R.; Field, M. A Knowledge-Based Conflict Resolution Algorithm for Terminal Area Air Traffic Control Advisory Generation. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Montreal, QC, Canada, 6–9 August 2001; p. 1. [Google Scholar]
- IEEE 802.11 Working Group. (n.d.). IEEE 802.11 Wireless LANs. IEEE. 30 May. Available online: https://www.ieee802.org/11/ (accessed on 1 April 2025).
- Hwang, M.; Cha, H.; Jung, S.Y. Practical Endurance Estimation for Minimizing Energy Consumption of Multirotor Unmanned Aerial Vehicles. Energies 2018, 11, 2221. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. of UAVs (N) | |||||
|---|---|---|---|---|---|
| 20 | 25 | 30 | 35 | 40 | |
| Velocity = 3 m/s | 8.93 | 8.93 | 20.4 | 20.4 | 35.93 |
| Velocity = 5 m/s | 13.8 | 22.07 | 32.6 | 45.47 | 56.67 |
| N | Detected Conflicts | Handled Conflicts | 3D–3D Conflicts | 3D–2D Conflicts | 2D–2D Conflicts | Maneuvering Energy Consumption |
|---|---|---|---|---|---|---|
| 20 | 11 | 8 | 3 | 6 | 3 | 187.96 |
| 25 | 15 | 11 | 4 | 8 | 3 | 248.57 |
| 30 | 23 | 14 | 5 | 11 | 7 | 307.62 |
| 35 | 33 | 19 | 7 | 14 | 11 | 467.75 |
| 40 | 46 | 24 | 9 | 19 | 18 | 594.97 |
| N | Detected Conflicts | Handled Conflicts | 3D–3D Conflicts | 3D–2D Conflicts | 2D–2D Conflicts | Maneuvering Energy Consumption |
|---|---|---|---|---|---|---|
| 20 | 15 | 10 | 4 | 7 | 4 | 230.85 |
| 25 | 28 | 16 | 6 | 11 | 10 | 368.92 |
| 30 | 39 | 19 | 7 | 15 | 17 | 429.53 |
| 35 | 58 | 26 | 9 | 22 | 28 | 595.42 |
| 40 | 76 | 31 | 10 | 27 | 39 | 780.63 |
| N | Detected Conflicts | Handled Conflicts | 3D–3D Conflicts | 3D–2D Conflicts | 2D–2D Conflicts | Maneuvering Energy Consumption |
|---|---|---|---|---|---|---|
| 20 | 9 | 4 | 6 | 3 | 0 | 3.26 |
| 25 | 15 | 6 | 8 | 6 | 1 | 7.2 |
| 30 | 22 | 9 | 12 | 9 | 2 | 11.27 |
| 35 | 29 | 11 | 15 | 12 | 2 | 17.03 |
| 40 | 37 | 13 | 18 | 15 | 5 | 27.37 |
| N | Detected Conflicts | Handled Conflicts | 3D–3D Conflicts | 3D–2D Conflicts | 2D–2D Conflicts | Maneuvering Energy Consumption |
|---|---|---|---|---|---|---|
| 20 | 15 | 6 | 8 | 5 | 1 | 6.77 |
| 25 | 24 | 9 | 11 | 11 | 2 | 14.79 |
| 30 | 35 | 12 | 17 | 15 | 3 | 25.19 |
| 35 | 48 | 16 | 21 | 21 | 6 | 46.81 |
| 40 | 65 | 20 | 25 | 30 | 10 | 72.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Nabhan, N.; Alturkestani, R.; Belghith, A.; AlAloula, N. A Conflict Resolution Approach for Multiple Unmanned Aerial Vehicles. Electronics 2025, 14, 2247. https://doi.org/10.3390/electronics14112247
Al-Nabhan N, Alturkestani R, Belghith A, AlAloula N. A Conflict Resolution Approach for Multiple Unmanned Aerial Vehicles. Electronics. 2025; 14(11):2247. https://doi.org/10.3390/electronics14112247
Chicago/Turabian StyleAl-Nabhan, Najla, Rawan Alturkestani, Abdelfettah Belghith, and Nouf AlAloula. 2025. "A Conflict Resolution Approach for Multiple Unmanned Aerial Vehicles" Electronics 14, no. 11: 2247. https://doi.org/10.3390/electronics14112247
APA StyleAl-Nabhan, N., Alturkestani, R., Belghith, A., & AlAloula, N. (2025). A Conflict Resolution Approach for Multiple Unmanned Aerial Vehicles. Electronics, 14(11), 2247. https://doi.org/10.3390/electronics14112247