
Online SSA-Based Real-Time Degradation Assessment for Inter-Turn Short Circuits in Permanent Magnet Traction Motors




Abstract
1. Introduction
- (1)
- A method employing online identification to diagnose in real time the degradation resulting from inter-turn short circuits;
- (2)
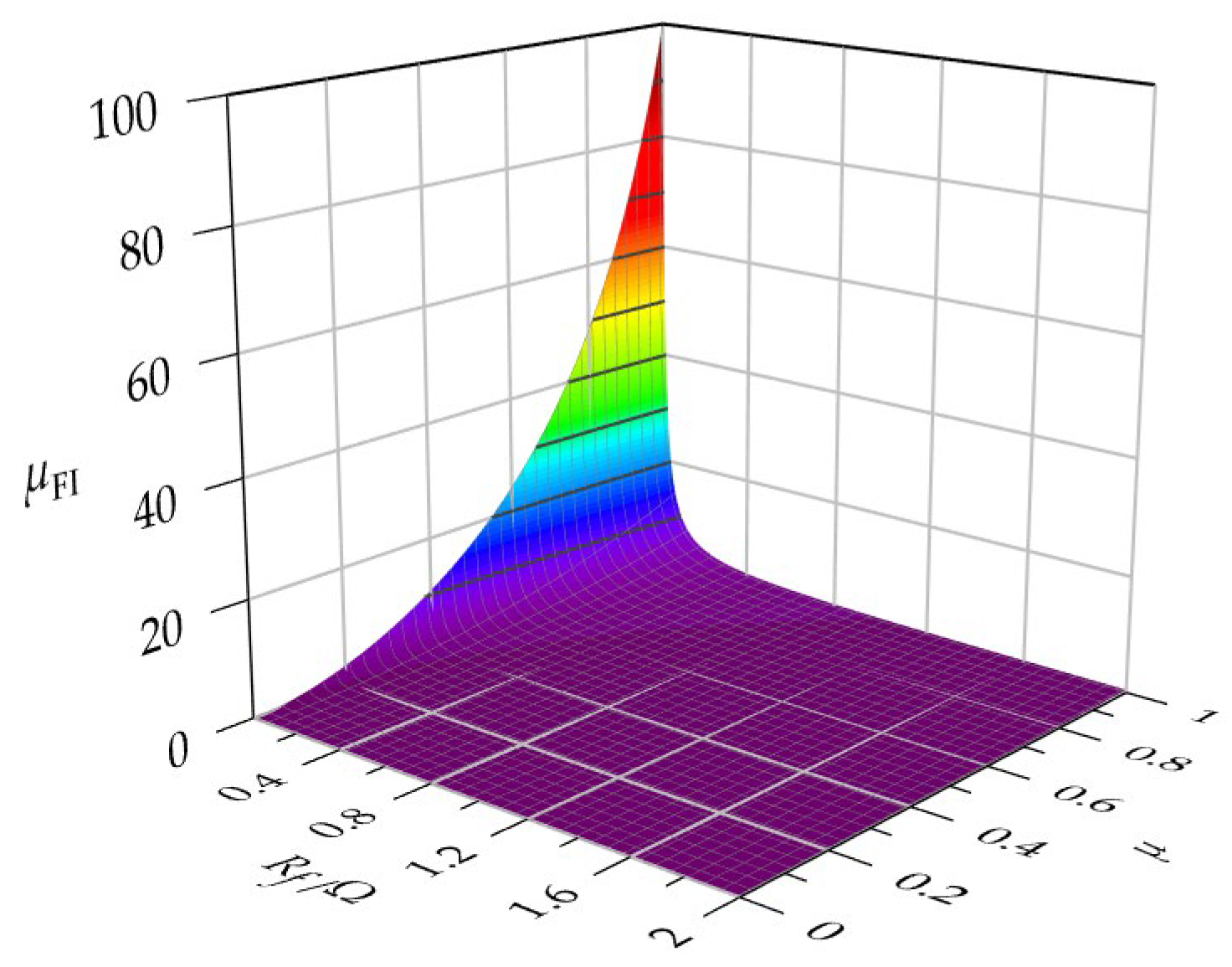
- The revelation of an μ and Rf nonlinear coupling mechanism on the fault current and a proposal for a hierarchical early warning strategy based on μFI;
- (3)
- An online SSA optimization framework designed to achieve fast convergence and stable estimation of the identified parameters and, thus, address the shortcomings of traditional algorithms in identifying strong nonlinear parameters.
2. Fault Analysis and Degradation Modeling for Inter-Turn Short Circuits in Permanent Magnet Synchronous Motors
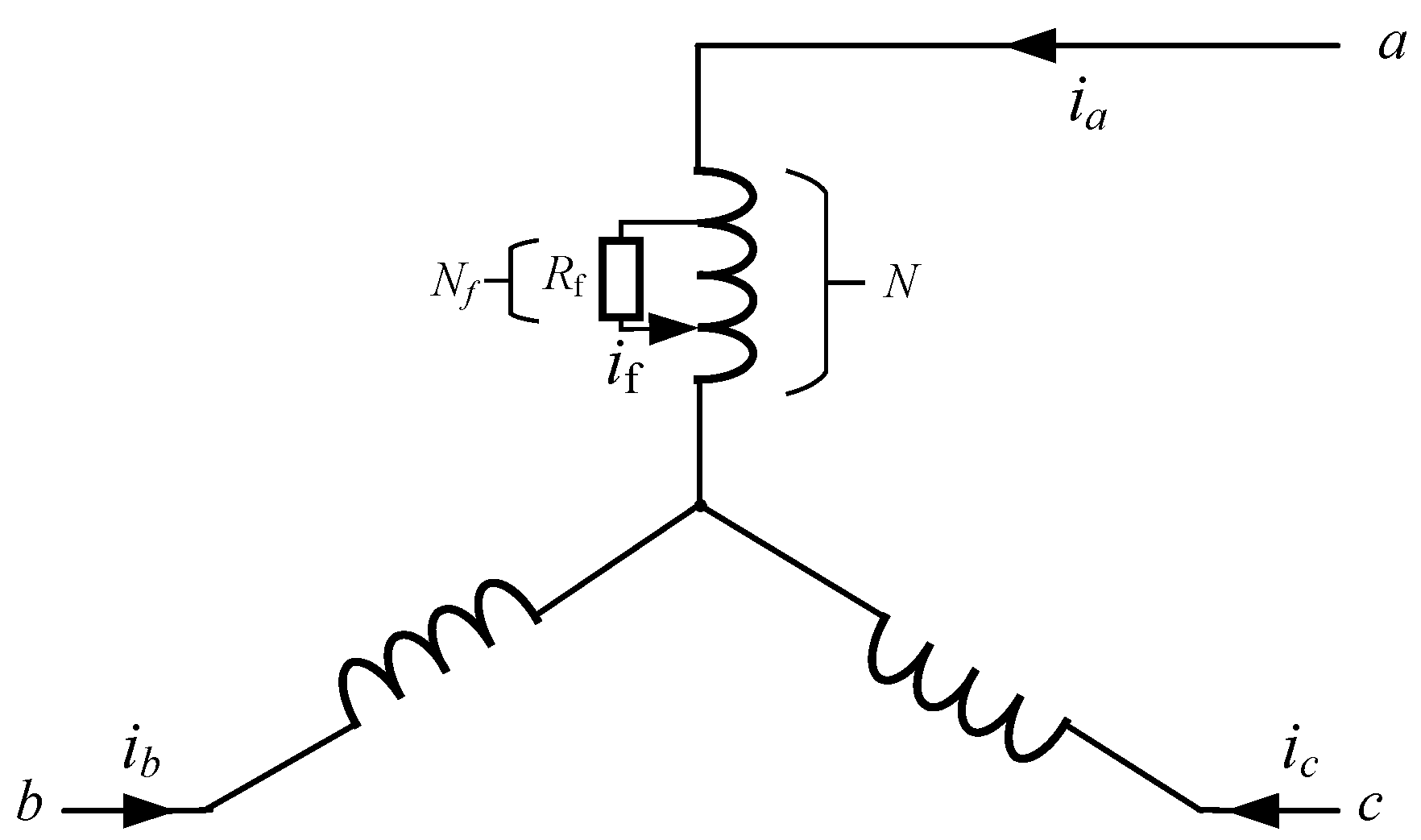
2.1. An Analysis of the Fault Mechanism of Inter-Turn Short Circuits
2.2. An Analysis of Inter-Turn Short-Circuit Fault Characteristics
2.3. Modeling of Fault Characteristics for Inter-Turn Short Circuits
3. A Real-Time Evaluation of the Degradation Resulting from Inter-Turn Short Circuits
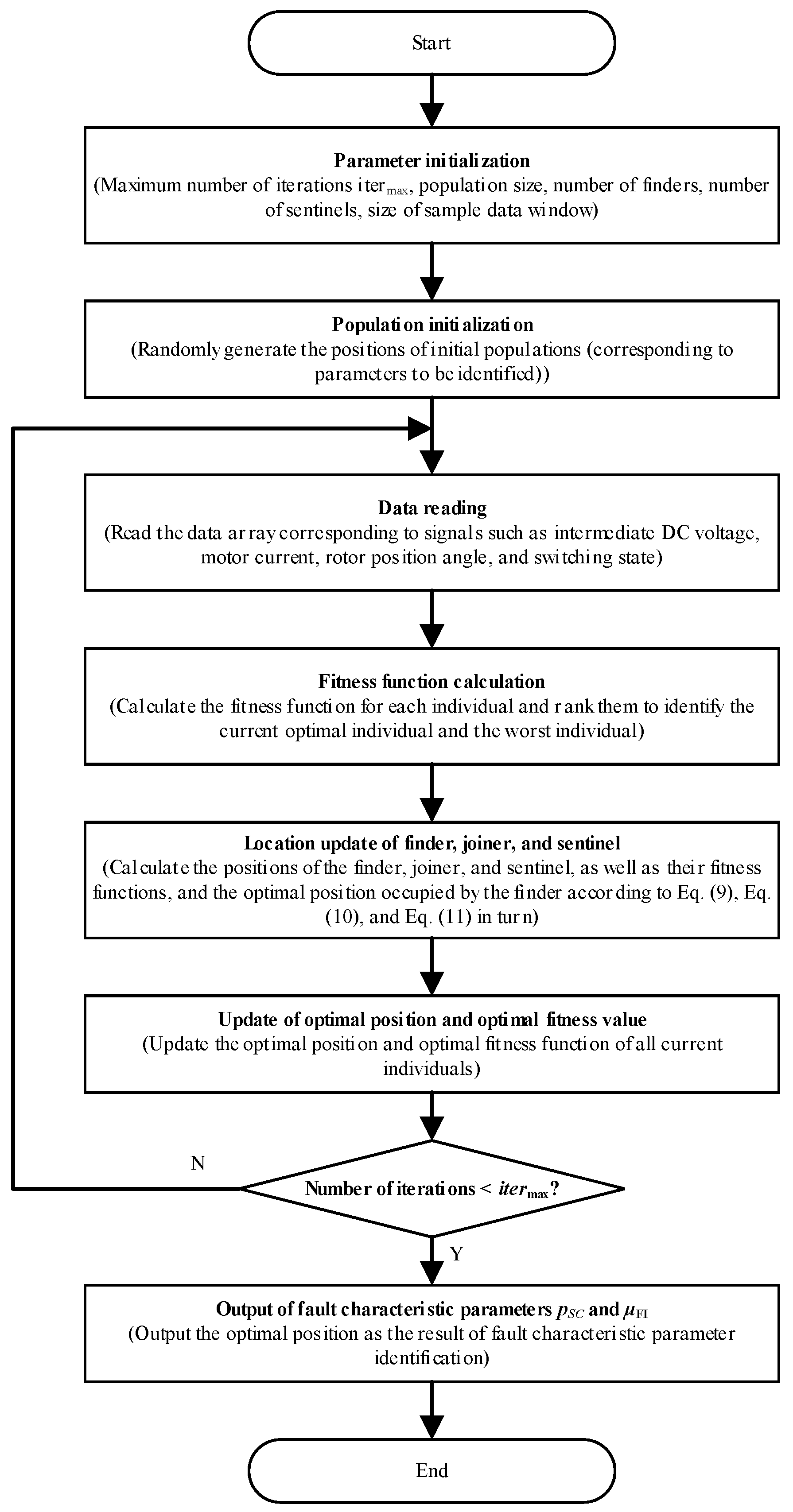
3.1. Basic Principles of SSA
3.2. Fitness Function Design
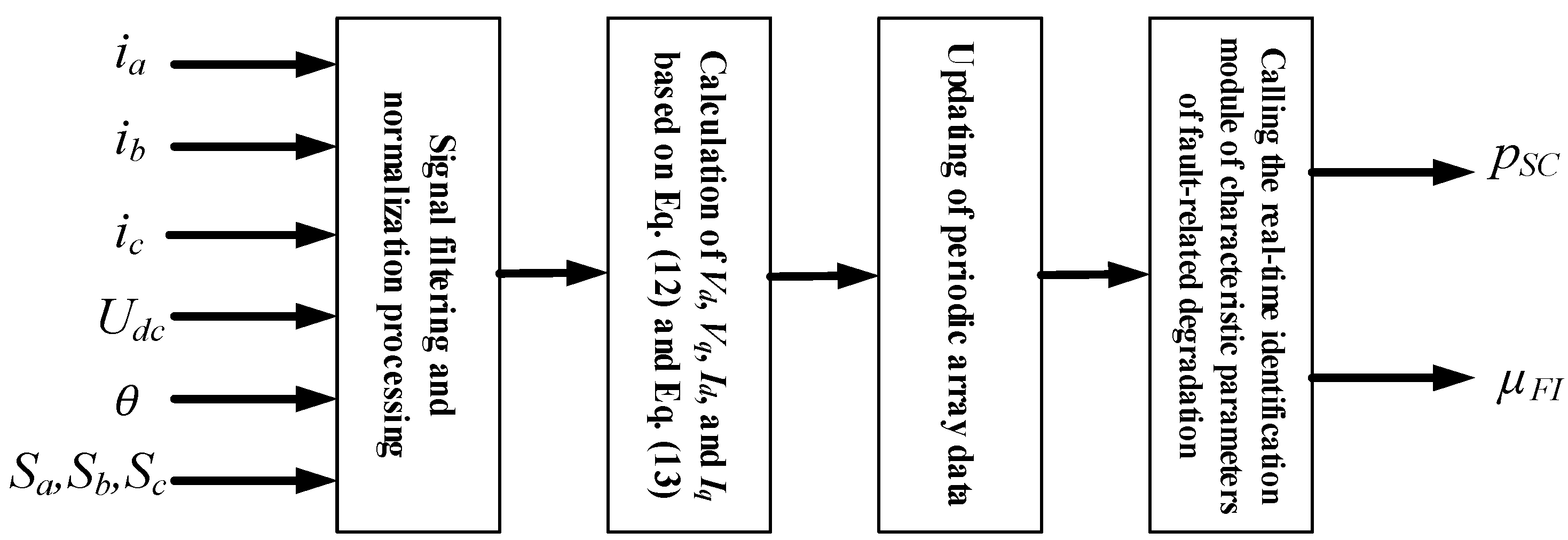
3.3. Real-Time Identification of Fault Characteristic Parameters
4. Experimental Verification
4.1. Diagnostic Objects and Algorithm Parameters
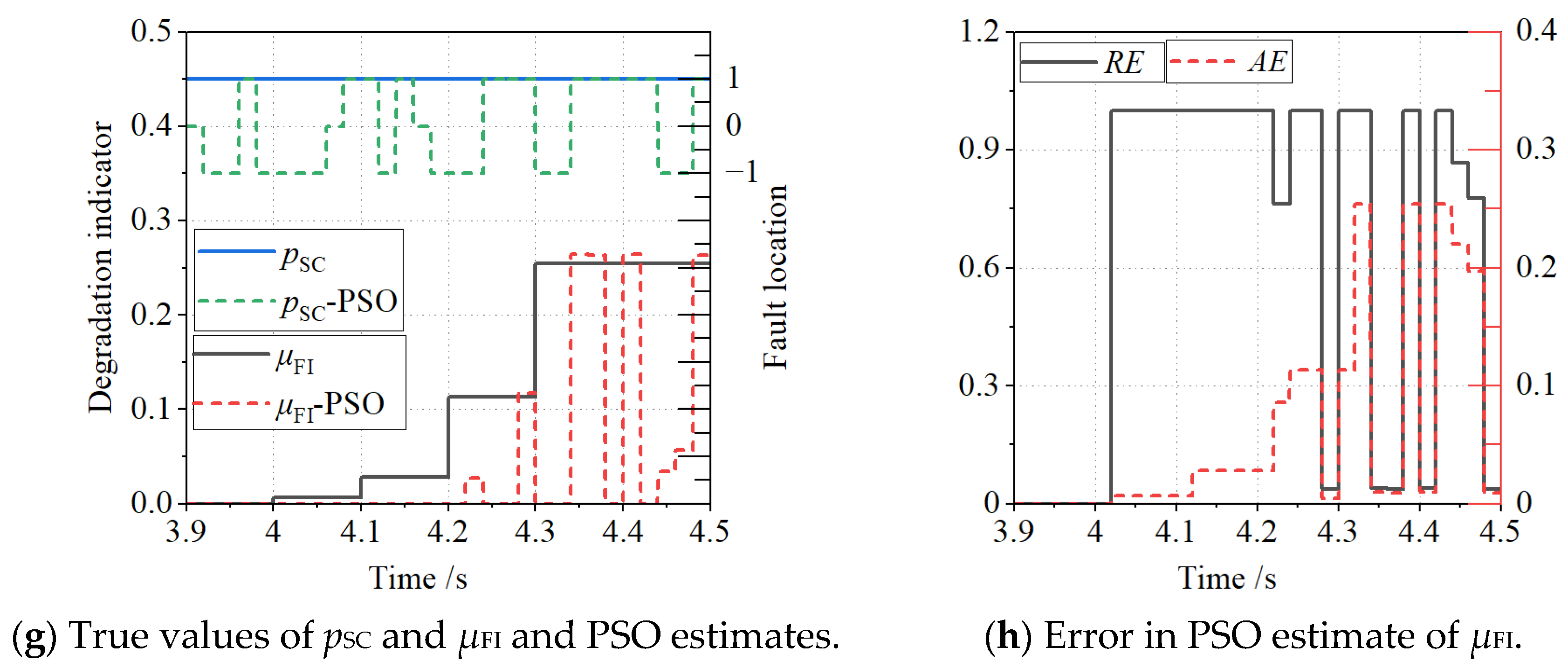
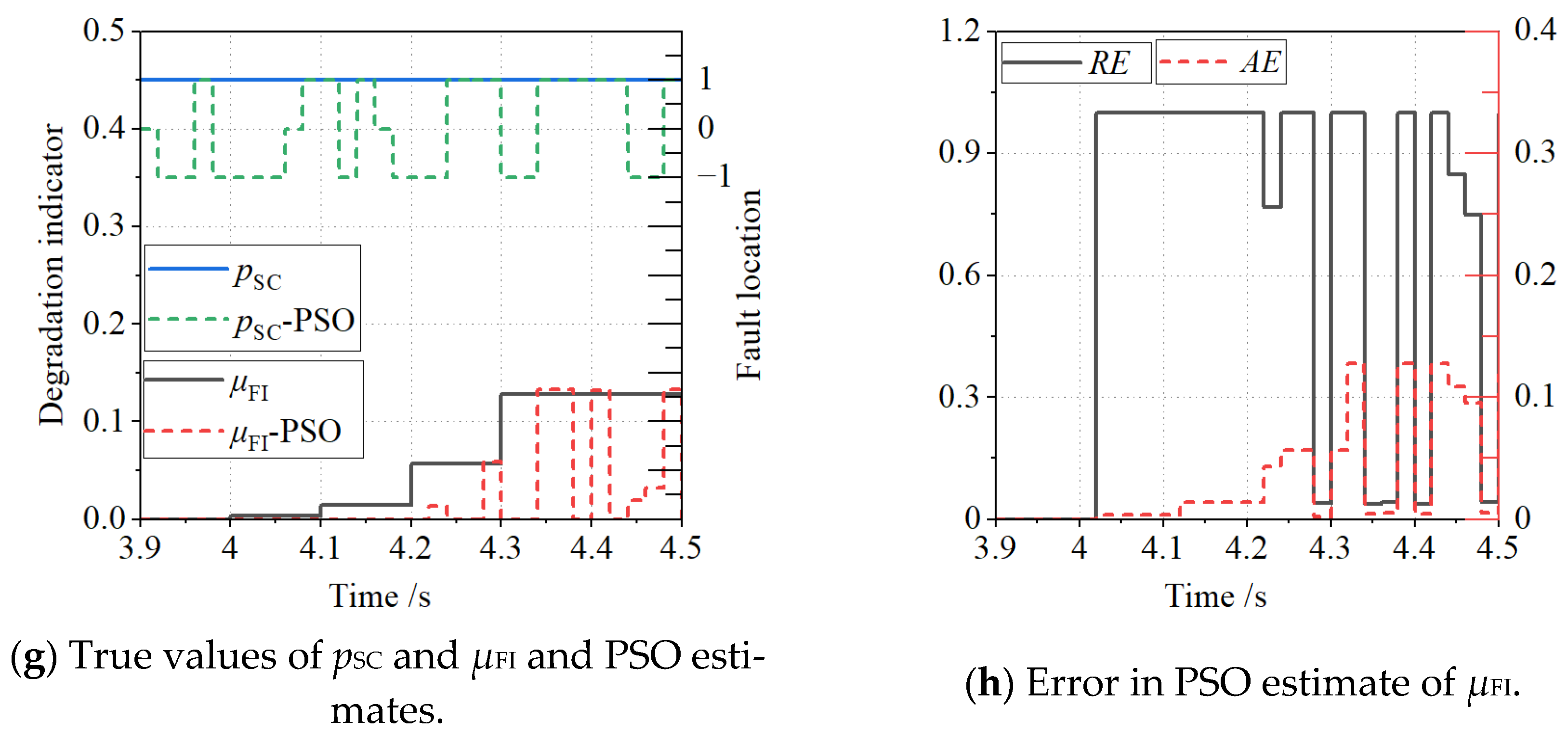
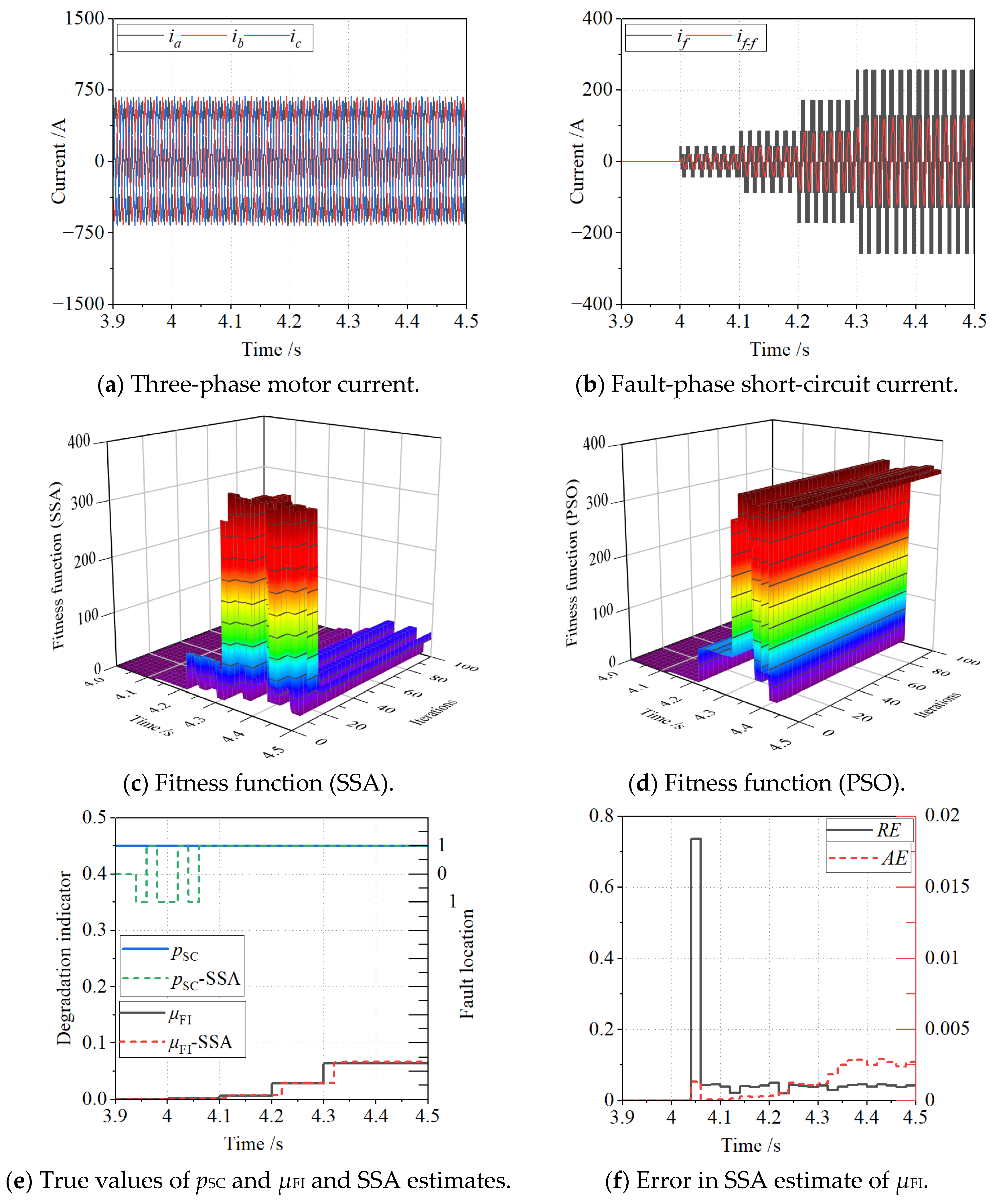
4.2. An Analysis and Discussion of the Test Results
5. Conclusions
- (1)
- In the course of establishing a fault model for inter-turn short circuits in permanent magnet synchronous motors, this paper has uncovered the coupling influence of the ratio of short-circuited turns and insulation resistance on the degree of fault-related degradation. A corresponding quantitative index has also been designed to evaluate the degradation state and provide a theoretical basis for early warning in fault classification.
- (2)
- The proposed SSA-based method enables the real-time tracking of ITSC degradation with 95% accuracy, addressing the limitations of traditional optimization algorithms in nonlinear parameter identification. This approach provides a practical solution for enhancing the reliability of rail transit traction systems.
- (3)
- The method proposed mitigates the challenges the subtle nature of faults poses to detection in the early stages to quickly and accurately track the degradation state resulting from inter-turn short circuits, significantly enhancing diagnostic capabilities for inter-turn short circuits in permanent magnet synchronous motors at early stages and providing an effective safeguard for the reliability and safety of the rail transit traction system.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ITSCs | inter-turn short circuits |
| SSA | Sparrow Search Algorithm |
| PMSMs | permanent-magnet synchronous motors |
References
- Gan, W.; Li, X.; Wei, D.; Ding, R.; Liu, K.; Chen, Z. Real-Time Multi-Sensor Joint Fault Diagnosis Method for Permanent Magnet Traction Drive Systems Based on Structural Analysis. Sensors 2024, 24, 2878. [Google Scholar] [CrossRef] [PubMed]
- Arellano-Padilla, J.; Sumner, M.; Gerada, C. Winding Condition Monitoring Scheme for a Permanent Magnet Machine Using High-frequency Injection. IET Electr. Power Appl. 2011, 5, 89–99. [Google Scholar] [CrossRef]
- Gurusamy, V.; Bostanci, E.; Li, C.; Qi, Y.; Akin, B. A Stray Magnetic Flux Based Robust Diagnosis Method for Detection and Location of Interturn Short Circuit Fault in PMSM. IEEE Trans. Instrum. Meas. 2021, 70, 3500811. [Google Scholar] [CrossRef]
- Eldeeb, H.H.; Berzoy, A.; Mohammed, O. Stator Fault Detection on DTC-Driven IM via Magnetic Signatures Aided by 2-D FEA Co-simulation. IEEE Trans. Magn. 2019, 55, 8101505. [Google Scholar] [CrossRef]
- Irhoumah, M.; Pusca, R.; Lefevre, E.; Mercier, D.; Romary, R.; Demian, C. Information Fusion with Belief Functions for Detection of Interturn Short-Circuit Faults in Electrical Machines Using External Flux Sensors. IEEE Trans. Ind. Electron. 2018, 65, 2642–2652. [Google Scholar] [CrossRef]
- Urresty, J.C.; Riba, J.R.; Romeral, L. Diagnosis of Interturn Faults in PMSMs Operating Under Nonstationary Conditions by Applying Order Tracking Filtering. IEEE Trans. Power Electron. 2013, 28, 507–515. [Google Scholar] [CrossRef]
- Jeong, H.; Moon, S.; Kim, S.W. An Early Stage Interturn Fault Diagnosis of PMSMs by Using Negative-sequence Components. IEEE Trans. Ind. Electron. 2017, 64, 5701–5708. [Google Scholar] [CrossRef]
- Kemmetmuller, W.; Faustner, D.; Kugi, A. Modeling of a Permanent Magnet Synchronous Machine with Internal Magnets Using Magnetic Equivalent Circuits. IEEE Trans. Magn. 2014, 50, 8101314. [Google Scholar]
- Forstner, G.; Kugi, A.; Wolfgang, K. Magnetic Equivalent Circuit Based Modeling Framework for Electric Motors Applied to a PMSM with Winding Short Circuit. IEEE Trans. Power Electron. 2020, 35, 12285–12295. [Google Scholar] [CrossRef]
- Mazzoletti, M.A.; Bossio, G.R.; De Angelo, C.H.; Espinoza-Trejo, D.R. A Model-based Strategy for Interturn Short-circuit Fault Diagnosis in PMSM. IEEE Trans. Ind. Electron. 2017, 64, 7218–7228. [Google Scholar] [CrossRef]
- Moon, S.; Jeong, H.; Lee, H.; Kim, S.W. Interturn Short Fault Diagnosis in a PMSM by Voltage and Current Residual Analysis with the Faulty Winding Model. IEEE Trans. Energy Convers. 2017, 33, 190–198. [Google Scholar] [CrossRef]
- Guezmil, A.; Berriri, H.; Pusca, R.; Sakly, A.; Romary, R.; Mimouni, M.F. Detecting Inter-turn Short-circuit Fault in Induction Machine using High-order Sliding Mode Observer: Simulation and Experimental verification. J. Control Autom. Electr. Syst. 2017, 28, 532–540. [Google Scholar] [CrossRef]
- Abdallah, H.; Benatman, K. Stator Winding Inter-turn Short-circuit Detection in Induction Motors by Parameter Identification. IET Electr. Power Appl. 2017, 11, 272–288. [Google Scholar] [CrossRef]
- Kim, K.H. Simple Online Fault Detecting Scheme for Short-circuited Turn in a PMSM Through Current Harmonic Monitoring. IEEE Trans. Ind. Electron. 2011, 58, 2565–2568. [Google Scholar] [CrossRef]
- Alvarez-Gonzalez, F.; Griffo, A.; Wang, B. Permanent Magnet Synchronous Machine Stator Windings Fault Detection by Hilbert–Huang Transform. J. Eng. 2019, 17, 3505–3509. [Google Scholar] [CrossRef]
- Lee, H.; Jeong, H.; Koo, G.; Ban, J.; Kim, S.W. Attention Recurrent Neural Network-based Severity Estimation Method for Interturn Short-circuit Fault in PMSMs. IEEE Trans. Ind. Electron. 2020, 68, 3445–3453. [Google Scholar] [CrossRef]
- Mohammad-Alikhani, A.; Nahid-Mobarakeh, B.; Hsieh, M.-F. One-Dimensional LSTM-Regulated Deep Residual Network for Data-Driven Fault Detection in Electric Machines. IEEE Trans. Ind. Electron. 2024, 71, 3083–3092. [Google Scholar] [CrossRef]
- Fang, Y.; Wang, M.; Wei, L. Deep Transfer Learning in Inter-turn Short Circuit Fault Diagnosis of PMSM. In Proceedings of the 2021 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 8–11 August 2021. [Google Scholar]
- Fadzail, N.F.; Zali, S.M.; Khairudin, M.A.; Hanafi, N.H. Stator Winding Fault Detection of Induction Generator Based Wind Turbine Using ANN. Indones. J. Electr. Eng. Comput. Sci. 2020, 19, 126. [Google Scholar] [CrossRef]
- Shih, K.-J.; Hsieh, M.-F.; Chen, B.-J.; Huang, S.-F. Machine Learning for Inter-turn Short-circuit Fault Diagnosis in Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2022, 58, 8204307. [Google Scholar] [CrossRef]
- Song, Q.; Wang, M.; Lai, W.; Zhao, S. On Bayesian Optimization-Based Residual CNN for Estimation of Inter-Turn Short Circuit Fault in PMSM. IEEE Trans. Power Electron. 2023, 38, 2456–2468. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A Novel Swarm Intelligence Optimization Approach: Sparrow Search Algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated power/kW | 1226 | Stator resistance/Ω | 0.02039 |
| Rated speed/(r/min) | 1725 | Stator d-axis inductance/H | 0.00107 |
| Rated torque/Nm | 6787 | Stator q-axis inductance/H | 0.00246 |
| Rated current/A | 549 | Flux linkage of permanent magnet rotor/Wb | 1.073 |
| Rated intermediate voltage/V | 1800 | Number of motor pole pairs | 4 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Calculation cycle/ms | 20 | Sampling cycle/us | 40 |
| Population size (SSA, PSO)/Nr. | 20 | SSA finder/Nr. | 10 |
| Maximum number of iterations (SSA, PSO)/time | 100 | SSA sentinel/Nr. | 5 |
| PSO inertia weight w | 0.5 | SSA safety value | 0.8 |
| PSO acceleration factors c1 and c2 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Z.; Li, X.; Liu, K.; Chen, Z.; Jiang, F. Online SSA-Based Real-Time Degradation Assessment for Inter-Turn Short Circuits in Permanent Magnet Traction Motors. Electronics 2025, 14, 2095. https://doi.org/10.3390/electronics14102095
Cheng Z, Li X, Liu K, Chen Z, Jiang F. Online SSA-Based Real-Time Degradation Assessment for Inter-Turn Short Circuits in Permanent Magnet Traction Motors. Electronics. 2025; 14(10):2095. https://doi.org/10.3390/electronics14102095
Chicago/Turabian StyleCheng, Zhenglin, Xueming Li, Kan Liu, Zhiwen Chen, and Fengbing Jiang. 2025. "Online SSA-Based Real-Time Degradation Assessment for Inter-Turn Short Circuits in Permanent Magnet Traction Motors" Electronics 14, no. 10: 2095. https://doi.org/10.3390/electronics14102095
APA StyleCheng, Z., Li, X., Liu, K., Chen, Z., & Jiang, F. (2025). Online SSA-Based Real-Time Degradation Assessment for Inter-Turn Short Circuits in Permanent Magnet Traction Motors. Electronics, 14(10), 2095. https://doi.org/10.3390/electronics14102095