1. Introduction
Under the background of carbon neutrality, parabolic trough solar field (PTSF) systems have attracted considerable attention both domestically and internationally due to their simple structure, low cost, and high commercial maturity [
1]. In practice, the solar collector field is affected by external disturbances such as solar radiation fluctuations, ambient temperature variations, and measurement noise, while internal uncertainties caused by equipment aging lead to significant parameter variations [
2]. These uncertainties result in outlet temperature fluctuations, which must be mitigated by regulating the heat transfer oil flow rate. Due to the time-delay effect of the oil flow rate on the outlet temperature, inadequate prediction and control of the system dynamics may lead to temperature deviations beyond the safe operating range [
3]. Therefore, the uncertainties and time-delay effect pose significant challenges to achieving stable and efficient temperature control of PTSF systems.
In recent years, model predictive control (MPC) has demonstrated excellent performance in the temperature regulation of PTSF systems [
4,
5]. This is largely attributed to its inherent predictive capability, which functions as an implicit feedforward mechanism and effectively addresses the issue of large thermal inertia. However, the model-based optimization process relies heavily on the accuracy of the system model [
6]. The widespread uncertainties in the actual system significantly affect prediction accuracy, reducing the stability and reliability of the control. The conventional MPC often lacks proactive identification and adaptation mechanisms when dealing with unknown dynamics or parameter variations, making it difficult to achieve robust control.
To better handle system uncertainties, several advanced MPC-based strategies have been developed. When uncertainties are bounded, robust model predictive control (RMPC) ensures system robustness by considering worst-case scenarios but often leads to overly conservative control [
7,
8]. Its performance is heavily dependent on the accuracy of the initial model, making it unsuitable for scenarios with large disturbances or significant parameter variations. Stochastic model predictive control (SMPC) incorporates probability distributions to characterize disturbances and parameter uncertainties [
9,
10]. Adaptive MPC updates the system model online by identifying model parameters [
11]. However, under significant uncertainty, these approaches often overlook the potential of actively exploring unknown dynamics during the control process, which may result in degraded performance. To address these limitations in highly uncertain environments, researchers have begun incorporating dual control principles into MPC to proactively learn unknown system dynamics and improve online model identification accuracy.
The dual control problem was first proposed and named by Feldbaum in 1961 [
12]. He noted that applying strong excitation to a system helps reveal richer modal information, thereby enhancing the understanding of system dynamics. In contrast, mild excitation reduces overshoot and stabilizes the output more quickly. These dual effects of control signals, exploration and exploitation, are inherently conflicting [
13], but their careful balance can lead to optimal control performance. The later research has shown that incorporating exploration under uncertainty can enhance control outcomes [
14]. MPC excels in rolling horizon optimization, constraint handling, and real-time implementation. Dual model predictive control (DMPC) integrates exploratory mechanisms into the MPC framework. By leveraging MPC’s predictive optimization and the active learning nature of dual control, DMPC naturally embeds exploratory signals into the control process. On the one hand, cautious inputs reduce output error; on the other hand, informative inputs help probe unknown dynamics, reducing system uncertainty. DMPC provides more robust and efficient control for stochastic systems.
Early studies mainly focused on validating the feasibility and effectiveness of DMPC algorithms [
15]. For instance, La proposed an online experiment design method to evaluate control performance but without experimental validation [
16]. Mesbah categorized DMPC into explicit and implicit dual approaches [
17]. The implicit dual methods rely on dynamic programming for numerical solutions [
18], which is computationally intensive. For example, Zacekova proposed a new algorithm that achieves the dual features of model predictive control by maximizing the smallest eigenvalue of the information matrix [
19]. The explicit dual control strategies introduce excitation signals explicitly to enable dual effect [
20]. For instance, Houska proposed a self-reflective MPC strategy, in which the future state estimation variance is incorporated into the objective function [
21]. Based on the nominal cost and an additional exploration term, Feng further optimized the weighting scheme [
22]. Bujarbaruah integrated set-membership filtering to enhance robustness [
23]. Heirung also incorporated the trace of the covariance estimate into the cost function [
24]. However, current methods still struggle to handle parameter uncertainty effectively. In the face of many complex real-world systems [
25,
26], the combination of theory and practice still faces challenges.
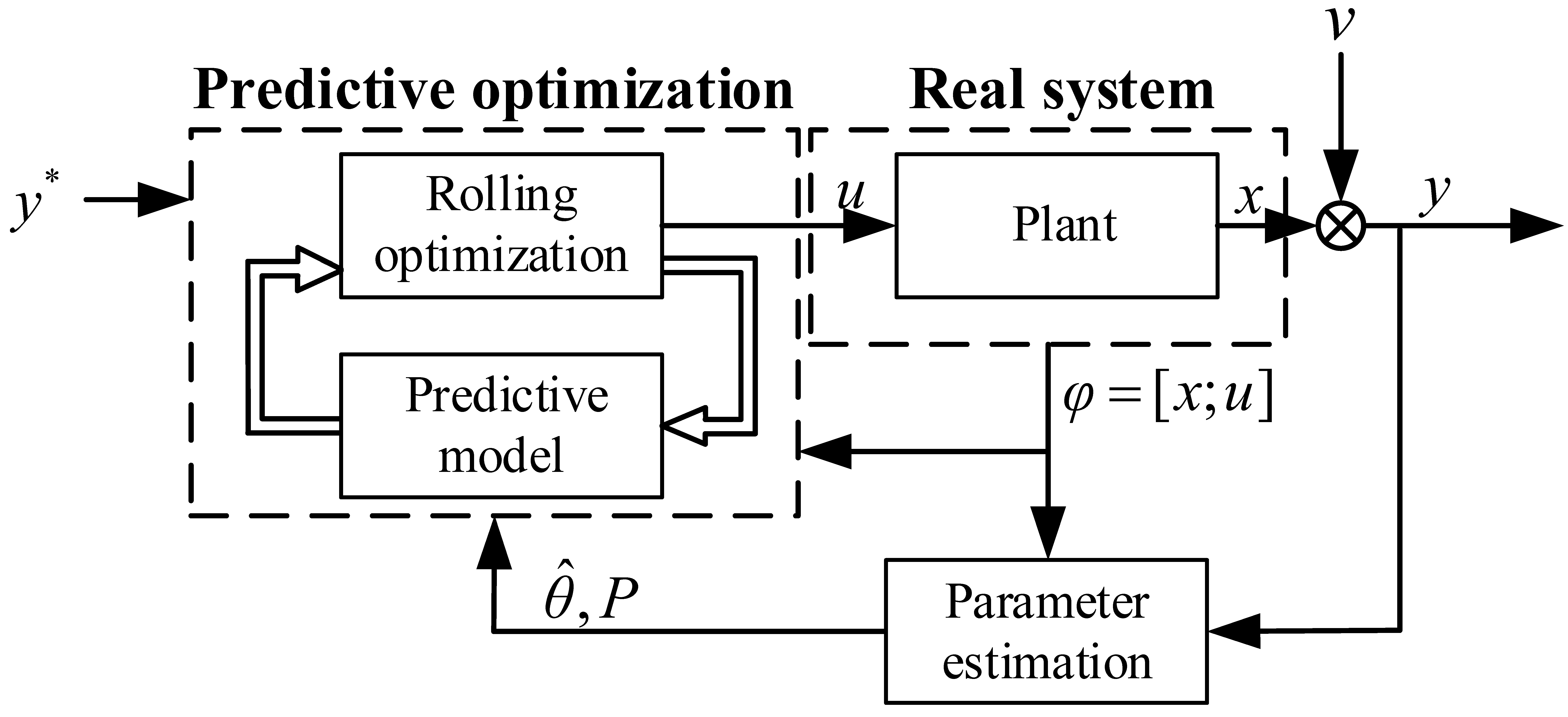
This paper proposes a stochastic dual model predictive control (SDMPC) method for linear systems with parameter uncertainty. Kalman filtering is integrated for online parameter updates, and a prediction error term related to the estimation accuracy is inserted into the objective function. Meanwhile, the output chance constraints are considered, forming a stochastic optimal control problem. The optimal solution obtained can be carefully applied to the system while actively exploring the uncertainty of parameters. A simplified simulation model of a solar collector field temperature control system was constructed to validate the proposed SDMPC method. Simulation results demonstrate that the proposed method can actively explore parameter variations and improve control performance.
In summary, the following points encapsulate this paper’s primary contributions:
We propose an SDMPC approach that integrates active learning to reduce system uncertainty. This method alleviates the dependence of traditional MPC on model accuracy and enhances its ability to handle complex constraints by introducing probabilistic output constraints. The approach combines the dual control learning component with the constraint handling capability.
Building on a deterministic equivalent framework [
24], this paper incorporates future prediction errors as exploratory signals to balance exploration and exploitation, so that the probing behavior occurs naturally. This improves parameter estimation and control performance while expanding control solutions.
We validate the proposed method through simulations on a solar collector field temperature control system. The system has the constraints of thermal oil flow rate and outlet temperature. At the same time, it has external disturbances from solar radiation, ambient temperature and measurement noise. The internal disturbances may contain parameter change caused by structural aging. The simulation shows that the SDMPC method provides robust control performance and reliable temperature tracking, proving the effectiveness of the SDMPC method.
As a result, this paper is organized as follows: The next section presents the system model and research problem.
Section 3 details the proposed SDMPC approach.
Section 4 models the solar collector field temperature control system and completes the simulation experiments based on the MATLAB platform. Finally,
Section 5 discusses conclusions and future outlook.
2. Problem Statement
This paper considers a class of linear discrete stochastic systems.
where
t is the discrete time and
and
represent the system output and control input, respectively. The sets
and
represent system parameters, with
. Some parameters are unknown.
is additive observation noise, assumed as a Gaussian sequence with zero mean and variance
r. The structure of system (
1) is commonly referred to as an autoregressive model with exogenous inputs (ARX), which characterizes a linear dependency between the current output, historical outputs, and external inputs. To facilitate the explicit description of parameter uncertainty, the stochastic system can be reformulated as:
where
is a system output measurement, determined by unknown parameter vector
, the deterministic regression vector
, and the external noise
. The vectors are defined as:
Defining the information
as the collection of all output measurements and past decisions recorded:
The finite-horizon control cost function over a prediction horizon of length
N, denoted by
, is defined as follows:
where
N is the length of the predictive horizon.
k is the sampling interval with
. At current moment
t,
represents the predicted output,
is the input, and
is the reference trajectory. The weight values
and
are typically chosen based on experience or empirical methods. Assuming that the past information
is available at time
t, the input sequence
is the problem solution, along with a sequence of control inputs for the subsequent
N steps.
denotes the conditional expectation given the known information
. Note that this paper employs a finite horizon
N for predictive control, and the objective function
may become unbounded in the case of an infinite horizon.
For real systems subject to constraints, input limitations are represented using simple box constraints:
where
and
denote the lower and upper bounds of the input, respectively, typically determined by physical hardware limitations or design specifications.
For the stochastic system (
2), the probabilistic characteristics of system uncertainties must be taken into account. The observation
also contains random qualities. Accordingly, the output chance constraint can be expressed as follows:
where
denotes the probability that the output satisfies the constraint, conditioned on the available information
. The
and
represent the lower and upper bounds of the output, respectively. Parameters
define the tolerable probability of violating the respective constraints.
This paper focuses on minimizing the objective function (
4) for stochastic systems with parameter uncertainty and external disturbances. The output chance constraint (
6), (
7) and the input constraint (
5) exist simultaneously. The problem is thus formulated as a stochastic optimal control problem over a finite prediction horizon
N:
The constraint set (
8c) and (
8d) is highly nonlinear, increasing the complexity of the optimization problem. A key step in solving problem (
8a) is the propagation of the mean and variance of the stochastic output
through the system dynamics in (
8b). To simplify problem (
8a), it is necessary to derive a deterministic propagation form of the stochastic output. Note that the inclusion of
in (
8b) indicates the presence of uncertainty but does not imply the disturbed sequence is used directly for prediction.
4. Simulation Experiment
In order to evaluate the control performance, this paper applies the proposed SDMPC to the temperature control system of a parabolic solar collector field. A conventional MPC method and a proportional integral derivative (PID) controller are utilized for comparative analysis. Subsequently, the immunity performance of SDMPC is verified through the incorporation of simulation experiments with parameter variations and temperature setpoint changes. These uncertainties are intended to replicate the inherent variability in ambient temperature and solar radiation levels.
4.1. Modeling of Trough Solar Collector Fields
Parabolic trough solar fields (PTSFs) are spatially distributed systems that collect and store solar radiation for power generation. Precise outlet temperature control is crucial for ensuring operational safety and energy conversion efficiency. However, environmental variations introduce multiple disturbances, complicating unbiased temperature regulation. In practical PTSF operations, disturbances fall into two categories. External factors include sensor noise and weather fluctuations. Internal variations involve changes in heat transfer coefficients and the effective area of the paraboloid.
Figure 2 illustrates the system structure of a PTSF. The thermal energy collection device consists of several parallel absorber tubes and parabolic reflectors. The tube absorbs solar radiation, and the circulating oil transfers it to the heat exchanger.
Assume that the heat transfer oil flow is equally distributed. The modeling focuses on the dynamic behavior of a single tube column. According to the principle of energy conservation and the actual heat exchange process, a simulation model is constructed following [
31]. The system is represented by a set of ordinary differential equations (ODEs):
where (
22) and (
23) represent the energy balance of the heat sink and heat transfer oil, respectively. The subscripts
f and
m denote the heat-absorbing pipe and heat transfer oil, respectively. The outlet temperature is mainly influenced by solar radiation, ambient temperature, inlet temperature, and oil flow rate. Refer to
Table 1 for the specific actual parameters. The oil flow rate is a directly adjustable influence in temperature control. Assuming efficient heat transfer,
. Simplifying the model by capturing its key dynamic relationship with outlet temperature:
where
is the control input and
is the output value of the collector field. The physical parameter is
.
4.2. Model Linearization
The dynamic process is assumed to be smooth and continuously differentiable. Considering the system’s nonlinearity, the model is linearized and discretized around steady-state equilibrium points, which correspond to
,
,
, and
, and we obtain
by calculating
. A simplified differential equation can be obtained by the linearization method in reference [
33]:
where the sampling interval is
.
denotes the deviation of the current variable from the operating point. The parameters are
,
,
,
, and
. To clarify the proposed method’s model, Equation (
25) is then rewritten in the ARX form as follows:
where the output is
and the input is
, which represents the change in outlet temperature and oil flow rate, respectively.
is the observation noise, which arises from sensor inaccuracies and ambient disturbances. In control research,
is commonly modeled as Gaussian white noise due to its mathematical tractability. Let
be the external input with
, and let each follow natural laws as measurable real values. This study adopts a single-input assumption to circumvent coupling effects in multi-input systems, which can be generalized to multiple outputs. Future work will focus on decoupling methodologies to enable generalized multi-input multi-output (MIMO) implementations.
For PTSF systems, the heat transfer oil flow rate is strictly constrained within , . Outlet temperature constraints can be relaxed as chance constraints. This study aims to regulate the oil flow to stabilize (or track) the outlet temperature under disturbance rejection and operational constraints.
4.3. Simulation and Results
The simplified model (
26) of the solar thermal collector field can be written in the form (
2) mentioned in
Section 3, where the
denotes the increment in outlet temperature. The known regression vector is defined as
. Here,
represents measurable but uncontrollable external inputs.
is the control input, denoting the change in oil flow rate. The system parameter vector
is directly determined by the physical parameters listed in
Table 1. Special note: since the parameter term
b shows negligible variation in measurements, it is considered constant in the control-oriented model.
The prediction and control horizons are set to and , respectively. The objective function weights are chosen as , and . These coefficients are chosen based on experience. The noise is set to . The simulation starts at and ends at . The initial values of identification parameters are , and the covariance matrix is , without any a priori information. The desired reference temperature is , and the initial output is . The initial flow rate is set to . The constraints are defined as , , and .
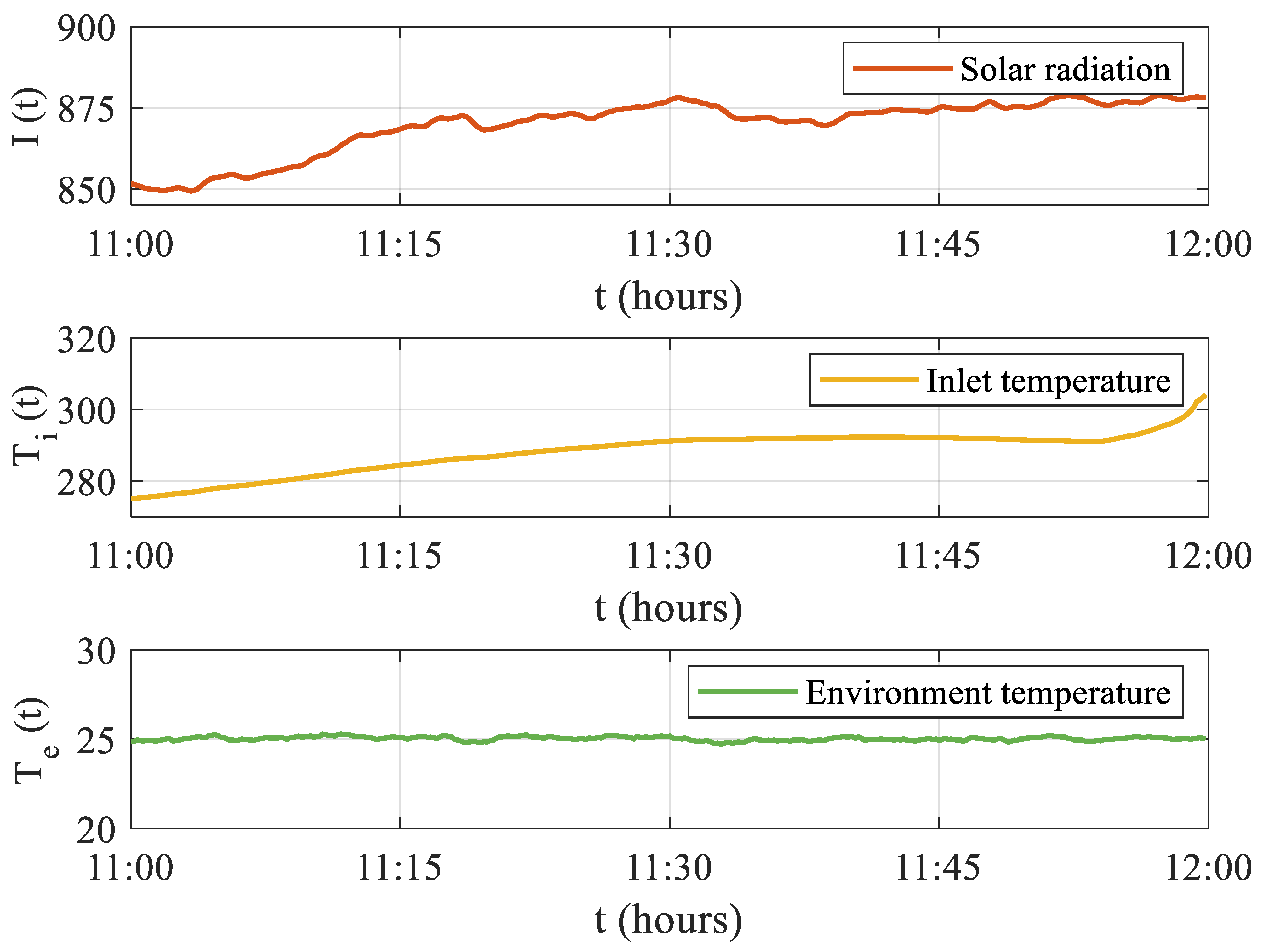
The simulation data simulate the possible variations in solar radiation, input temperature, and environment temperature from 11:00 to 12:00 noon, as shown in
Figure 3. The total sampling step is
, and we select the first 800 steps as part of the presentation.
4.3.1. Validation of Control Effectiveness
The experimental trial shows that SDMPC is able to satisfy the flow rate and output temperature constraints while stabilizing the outlet temperature.
The upper part of
Figure 4 compares the outlet temperature control performance of the proposed SDMPC (blue curve), traditional MPC (red curve), and PID controller (green curve). The above three methods successfully track the reference temperature, increasing from an initial value of 380 °C to a steady-state value of 390 °C. As highlighted in the zoomed-in subplot, the SDMPC (blue curve) achieves a faster response and converges to the reference temperature (yellow curve) earlier. Meanwhile, the PID controller (green curve) exhibits more pronounced oscillations during the initial transient phase, and the baseline MPC method (red curve) shows certain oscillatory behavior. The lower part of
Figure 4 shows the variation in the heat transfer oil flow rate. The control strategies show similar trends in flow rate adjustment. Comparing the results of experiments, it was demonstrated that the proposed SDMPC effectively tracks the outlet temperature and outperforms the baseline methods during the stabilization process.
In addition, the performance index comparison in
Figure 5 shows that the step cost
of SDMPC (blue curve) remains consistently closer to zero than PID (green dashed curve) and the basic MPC (red dashed curve). The results also directly demonstrate the superior stabilization performance of the proposed SDMPC. To further validate this result, a Monte Carlo simulation was conducted. We repeated trials 500 times to obtain statistical variance, aiming to minimize randomness and enhance the reliability of the performance evaluation. The averaged performance indices are reported in
Table 2. In conjunction with
Figure 4 and
Figure 5, it is also straightforward to conclude that the SDMPC achieves faster convergence to the desired temperature with a small overshoot, demonstrating stability and tracking capability.
4.3.2. Robustness Evaluation Under Disturbances
This subsection analyzes the dynamic response of the proposed SDMPC method under unknown perturbations. Additionally, a certain equivalent model predictive control (CEMPC) method without exploration mechanisms was implemented for comparison. It differs from SDMPC solely by disregarding the potential presence of parameter uncertainties.
In this experiment, parameter variations and outlet temperature setpoint changes are introduced. Two disturbances are applied to the system at time instances s and s, respectively. For , the system parameters are defined as . At , the parameters abruptly switch to . Following this, at , the outlet temperature setpoint is adjusted from 390 to 380 °C.
Figure 6 illustrates the system responses of two methods under both parameter variation and reference setpoint change scenarios. The red arrows highlight two key changes. The solid blue curve represents SDMPC, and the solid green curve represents CEMPC. The yellow solid line denotes the desired reference temperature. As shown in the upper part of
Figure 6, sudden parameter variations at the moment
t = 200 s cause fluctuation in
. Compared to SDMPC, the CEMPC results in larger output deviations, primarily due to its limited capability to adapt to parameter changes. As the lower zoomed-in part, the green curve representing the flow rate, exhibits larger oscillations during the transition.Changes in the reference temperature then cause a more substantial and longer-lasting fluctuation in the tracking response. The phenomenon can be illustrated in
Figure 7 and
Figure 8 in detail, which show the evolution of parameter estimates and their associated covariance.
In
Figure 7, the dark dashed line represents true values. The bold solid line represents SDMPC, while the lighter dashed line corresponds to CEMPC. Different colors represent different parameter elements
in turn. Taking
(blue) as an example, at the time
s, the SDMPC’s estimate
(blue solid line) quickly converges to the true value
(dark blue dashed line) via the real-time update of Kalman filter. In contrast, CEMPC’s estimate
(light blue line) fails to identify the true parameters even after 100 steps. When the setpoint changes at
s, the SDMPC has acquired sufficient knowledge to allow exit temperature tracking. Also, due to the increase in output error, learning is triggered again. The yellow, green, and red curves exhibit the same characteristics.
Figure 8 illustrates the variance
(the diagonal elements of
). The upper subplot represents CEMPC, which conducts parameter learning solely at the initial time (
s), without further adaptation thereafter. But in the lower subplot, representing SDMPC, it can be visualized that at
s and
s two peaks occurred. The second peak in
indicates that SDMPC introduces an exploratory signal into the control inputs, accelerating the learning process of the parameters. This observation is consistent with
Figure 7, illustrating the exploration and adjustment process of SDMPC under two different perturbations.
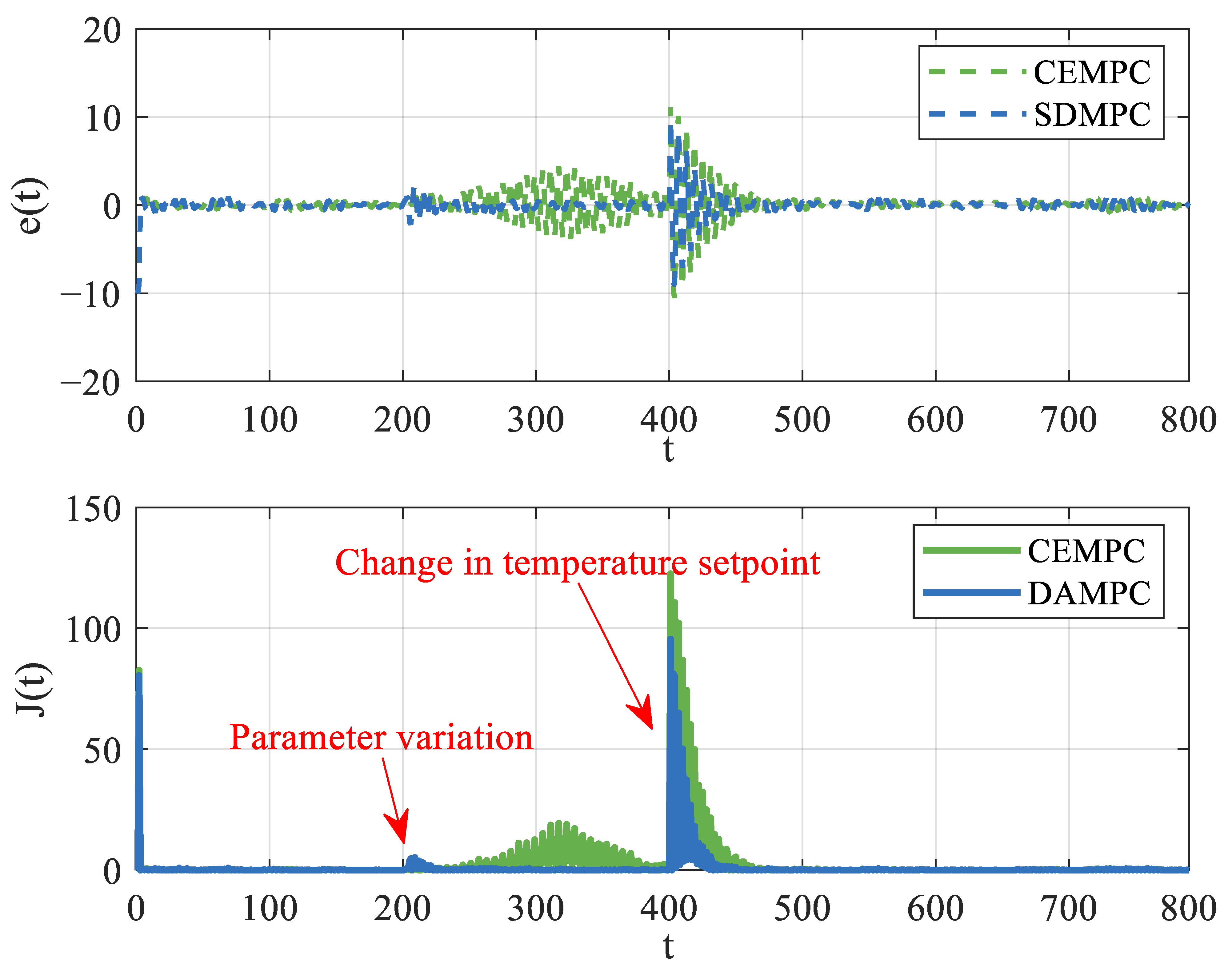
Figure 9 shows the variation in outlet temperature error
and the control performance index. Both disturbances induce significant fluctuations in the output error. The error of SDMPC (blue dotted line) between 200 s and 400 s is significantly smaller than that of CEMPC (green dotted line). Correspondingly, there are two increases in control performance
(in the lower part of the
Figure 9) observed, which is due to incorrect system parameters and large output errors. In conclusion, the SDMPC activates its exploration mechanism at the time of perturbations. SDMPC is better than CEMPC in terms of the ability to cope with parameter changes. The advantages are essential for long-term stability in solar collector control systems by mitigating parametric drift and cumulative errors.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}