
Research on the Double Frequency Suppression Strategy of DC Bus Voltage on the Rectification Side of a Power Unit in a New Type of Same Phase Power Supply System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- Topological breakthrough: The proposed back-to-back H-bridge architecture introduces bidirectional energy routing capability, enabling real-time harmonic compensation through its unique cascaded rectifier–inverter configuration—a paradigm shift from conventional unidirectional designs.
- Engineering Control revolution: Our dual-domain iterative control model mathematically establishes the nonlinear correlation between DC bus harmonics and grid-side THD, leading to the first adaptive disturbance compensation strategy with phase-synchronized harmonic suppression.
- System-level innovation: reduction in the DC bus ripple coefficient and a 37% THD decrease, outperforming active compensation methods.
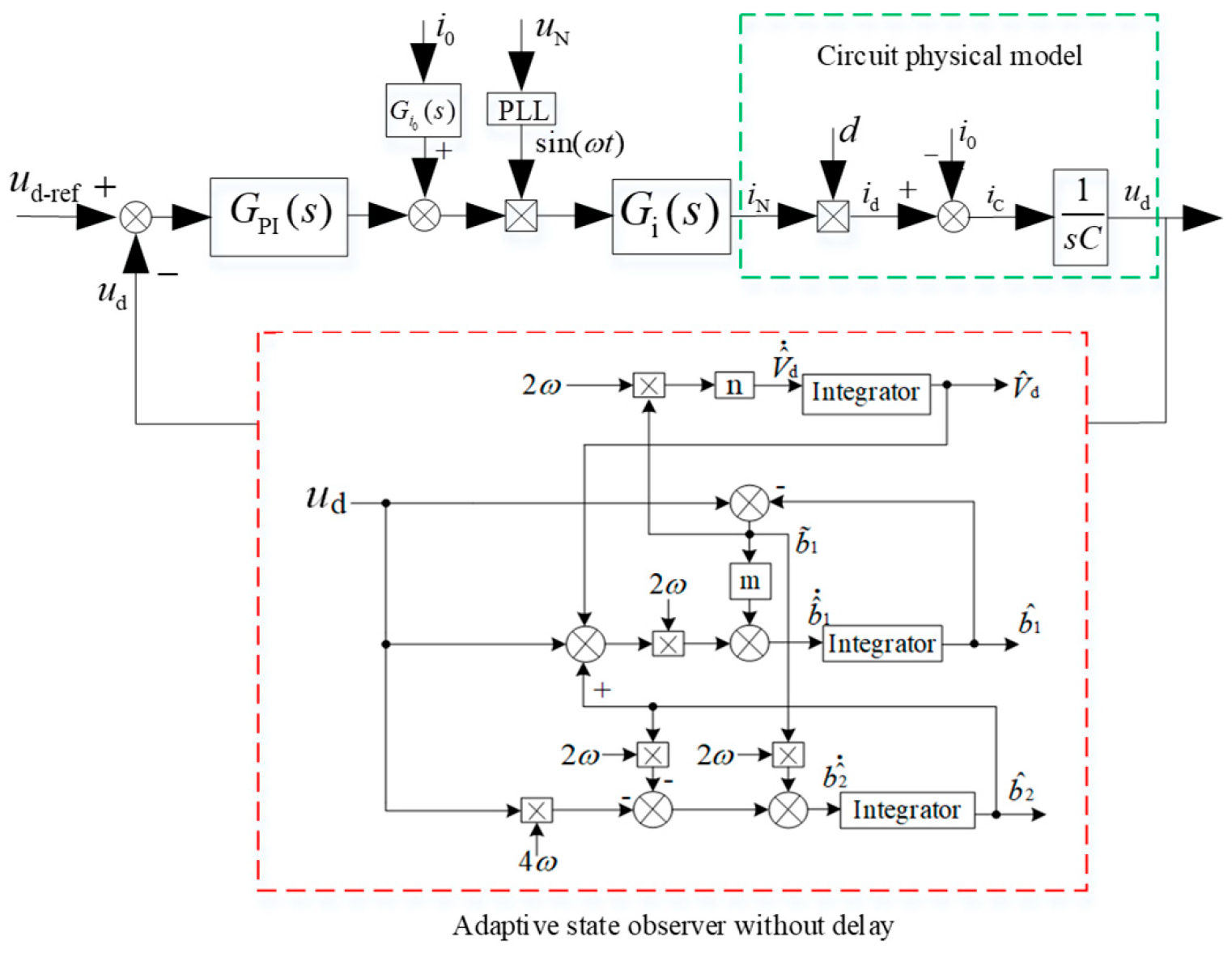
2. Modeling of Delay-Free Adaptive State Observer
2.1. Analysis of DC Bus Voltage Second Harmonic Ripple
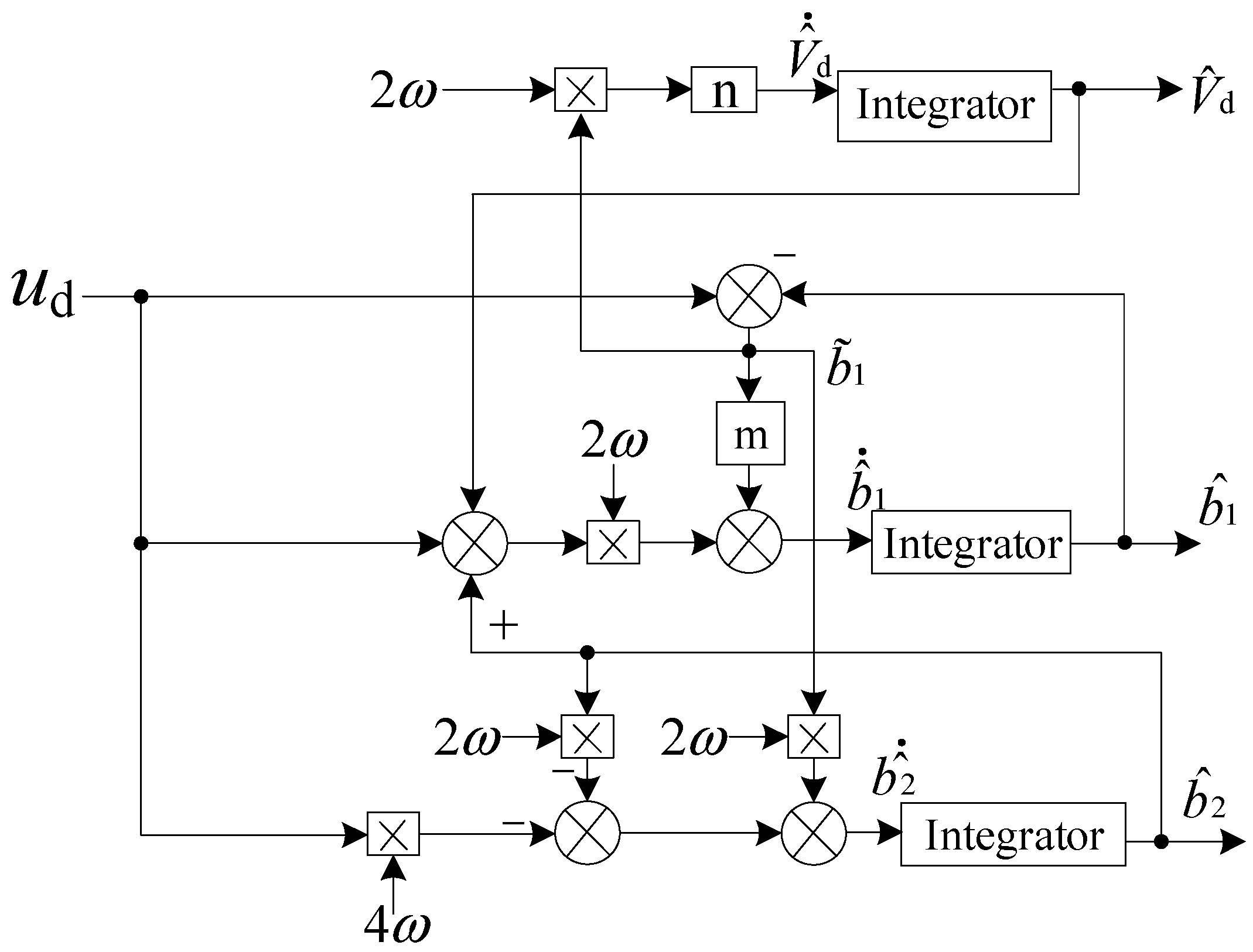
2.2. Constructing a Delay-Free Adaptive State Observer
2.3. Stability Analysis of Adaptive State Observer
2.4. Bilinear Modeling and Suppression Strategy of Adaptive State Observer
2.4.1. Establishment of the System Bilinear Model
2.4.2. Design of Adaptive State Observer
2.4.3. Stability Analysis of the System Model
2.4.4. Bilinear Control Strategy
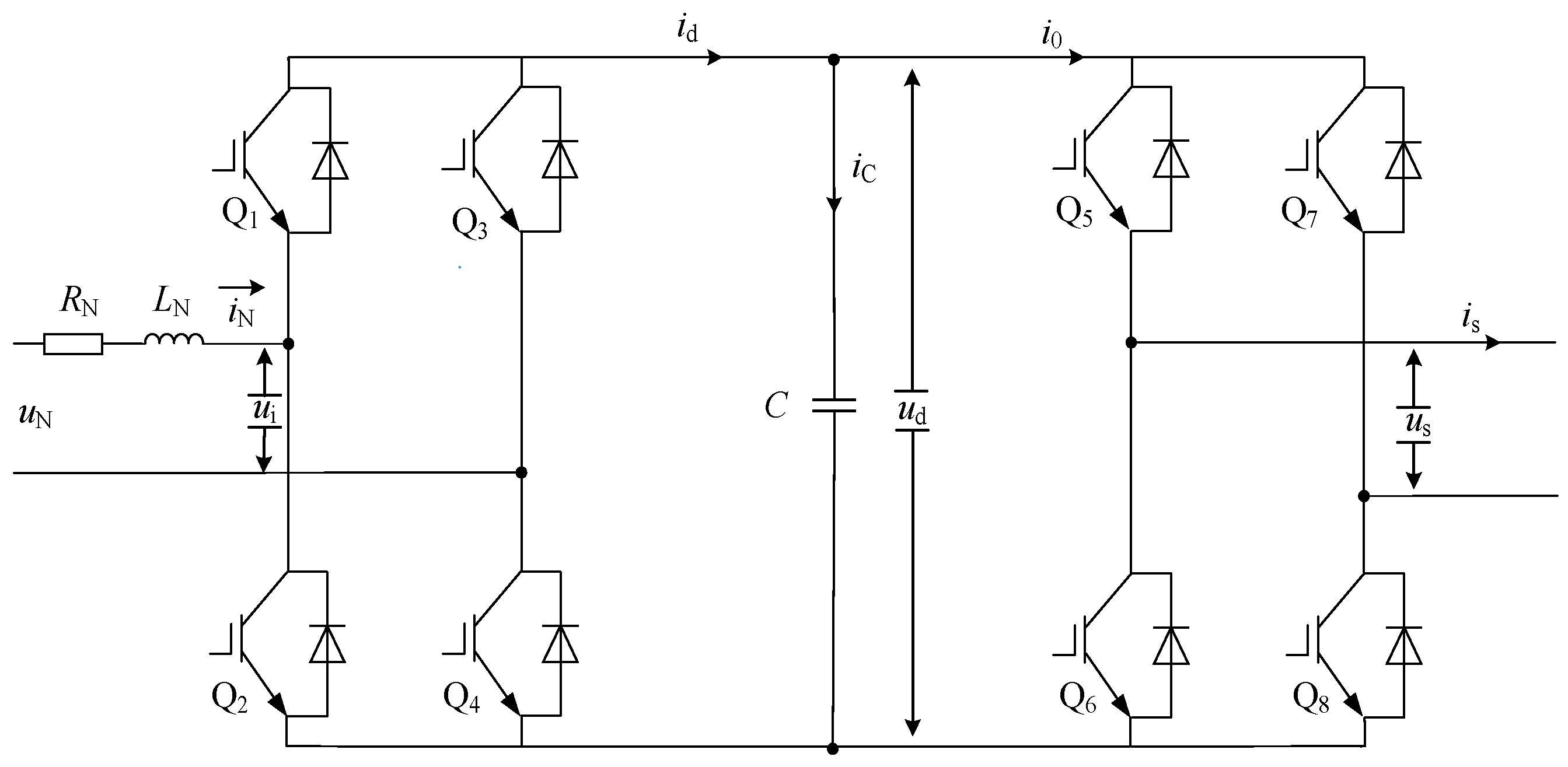
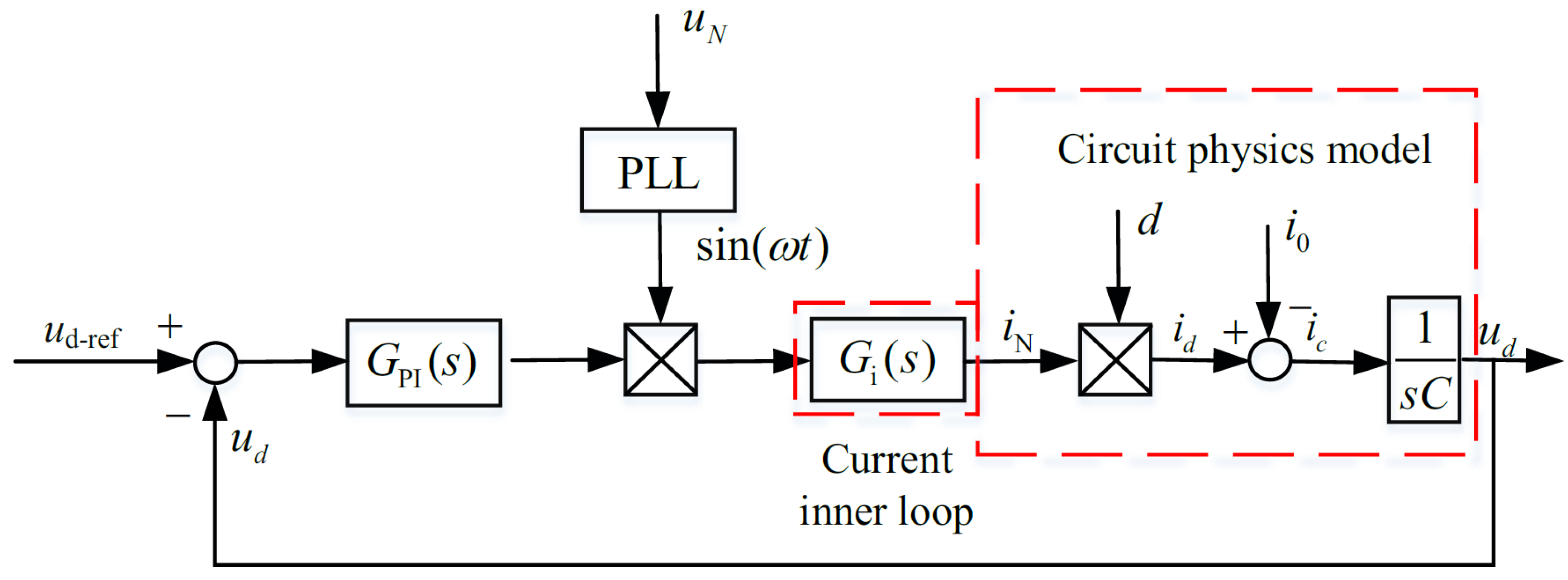
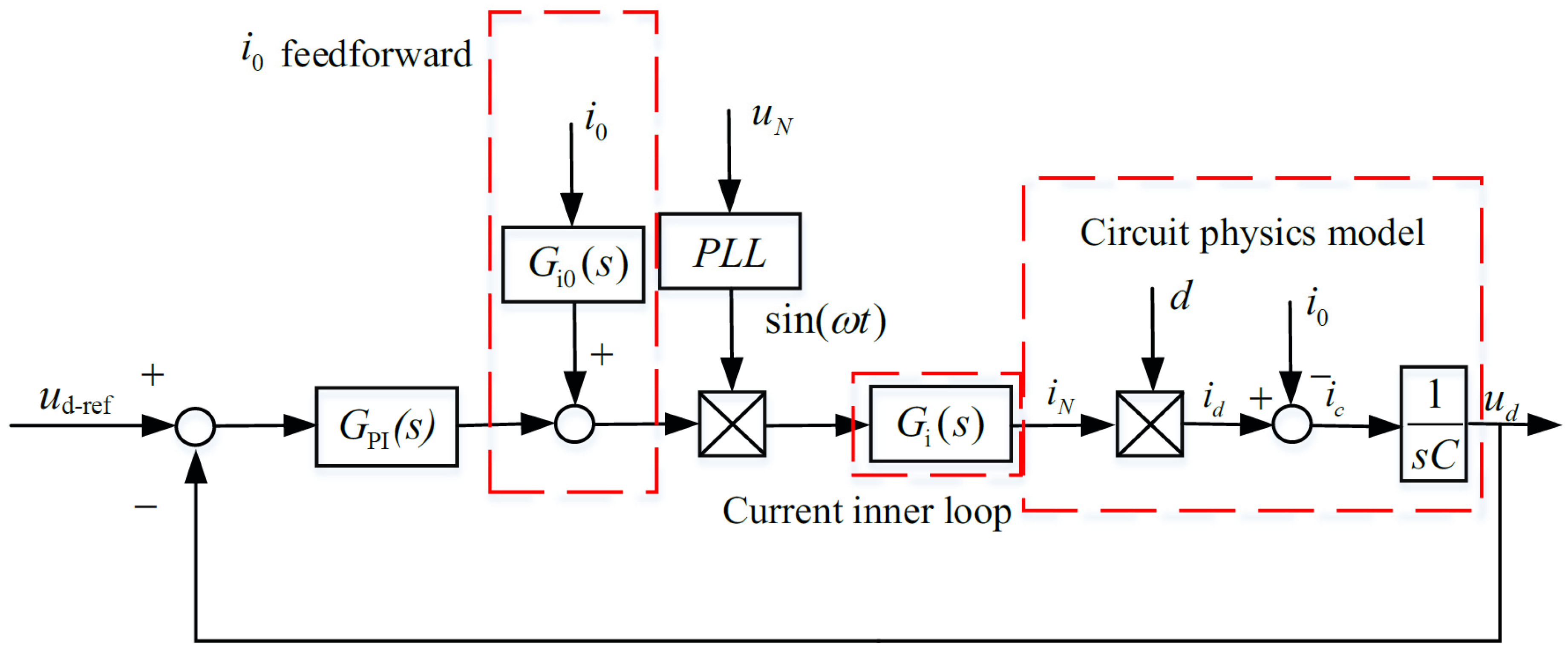
3. Dual Closed-Loop Control System for Power Unit Rectifier Side
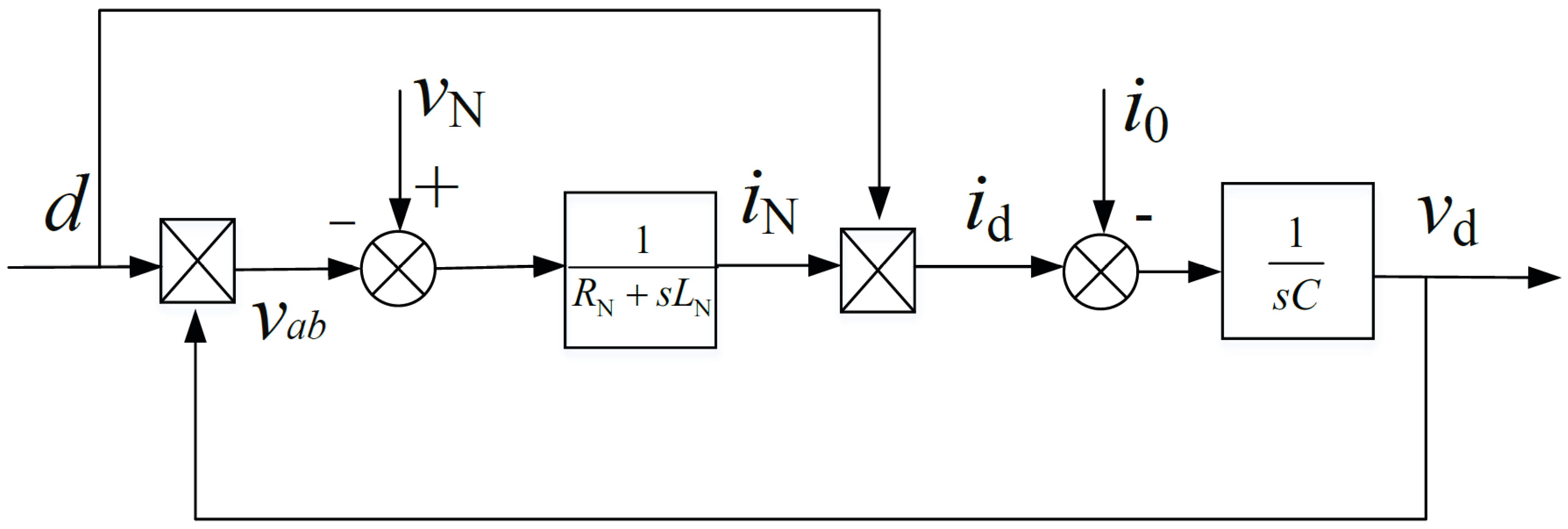
3.1. The Mathematical Model of the Single-Phase PWM Rectifier
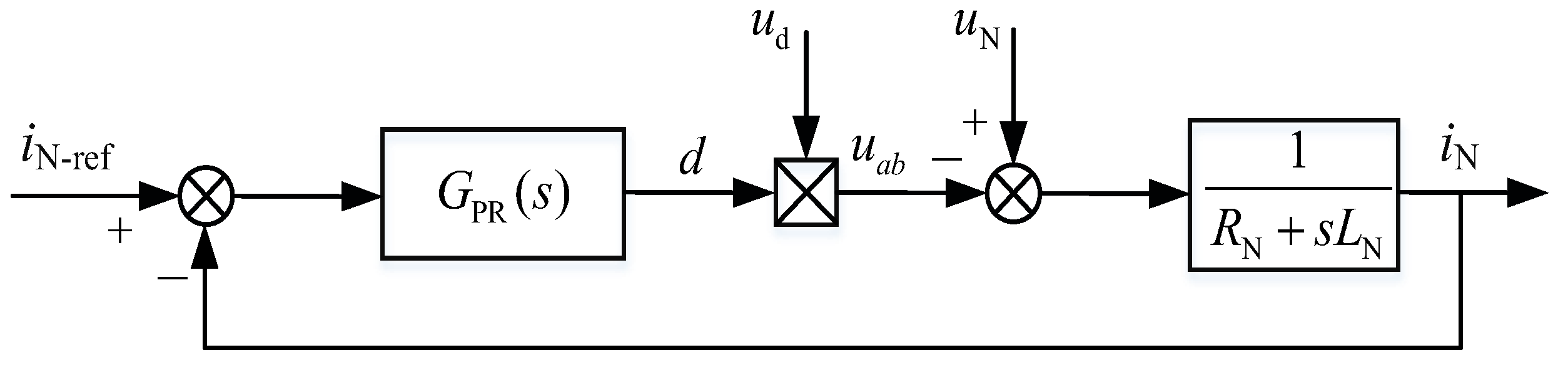
3.2. Control Strategy for Single-Phase PWM Rectifier
3.2.1. Current Inner Loop Control Strategy
3.2.2. Voltage Outer Loop Control Strategy
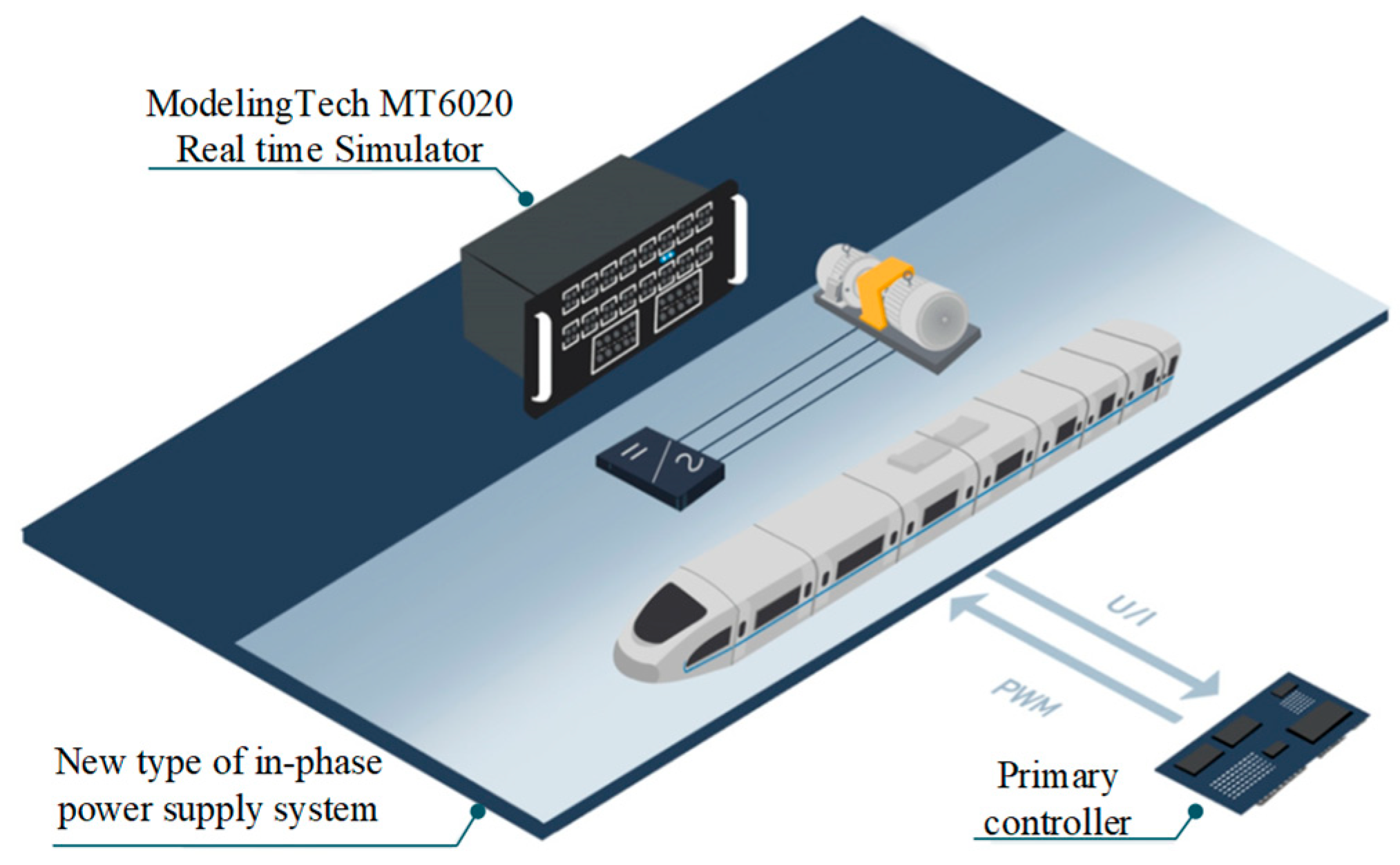
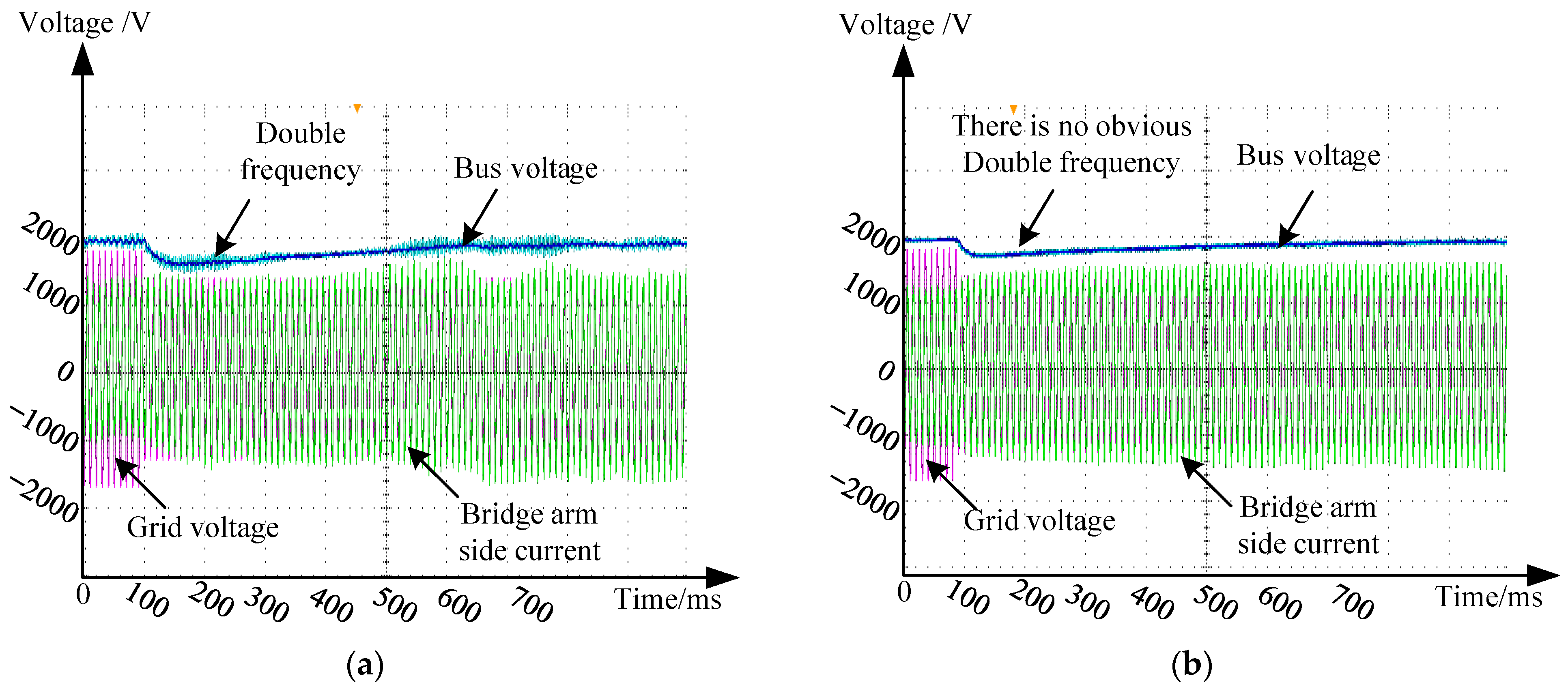
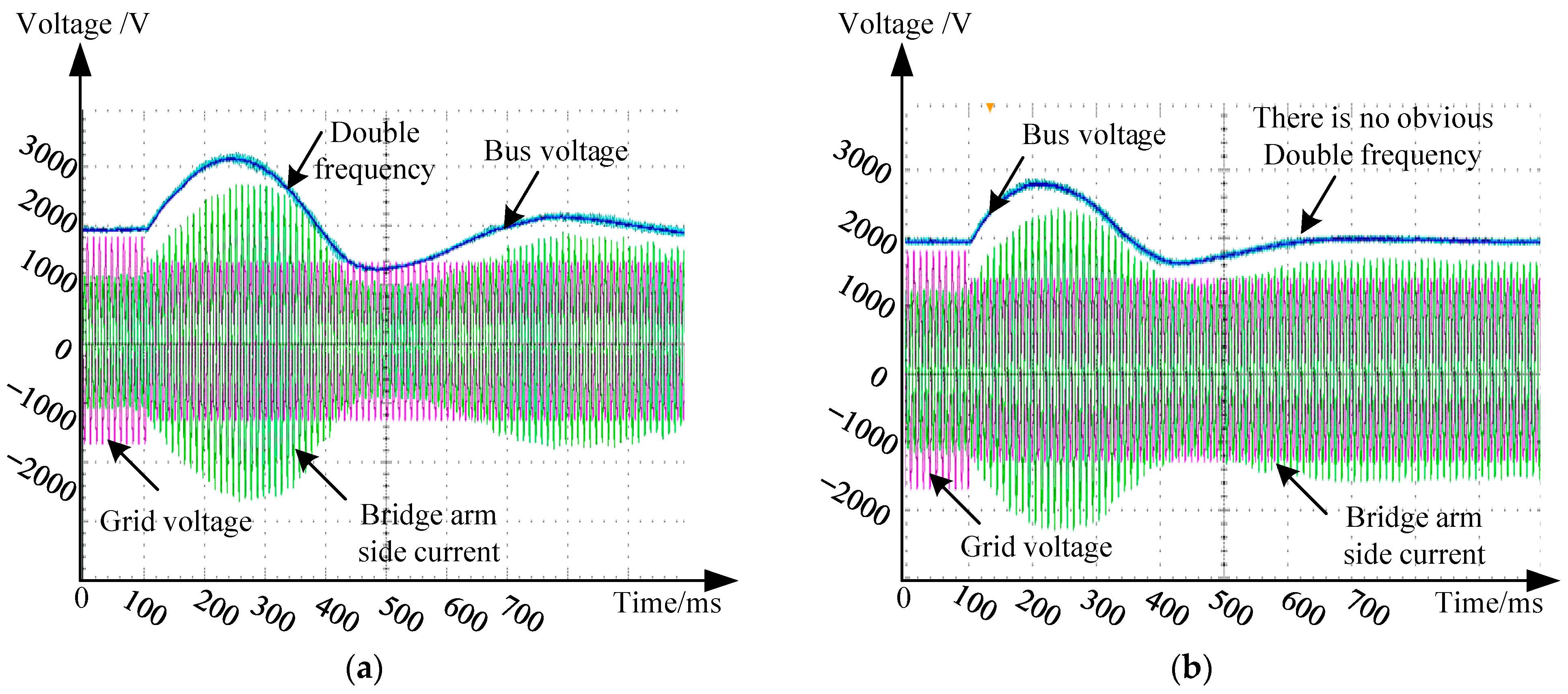
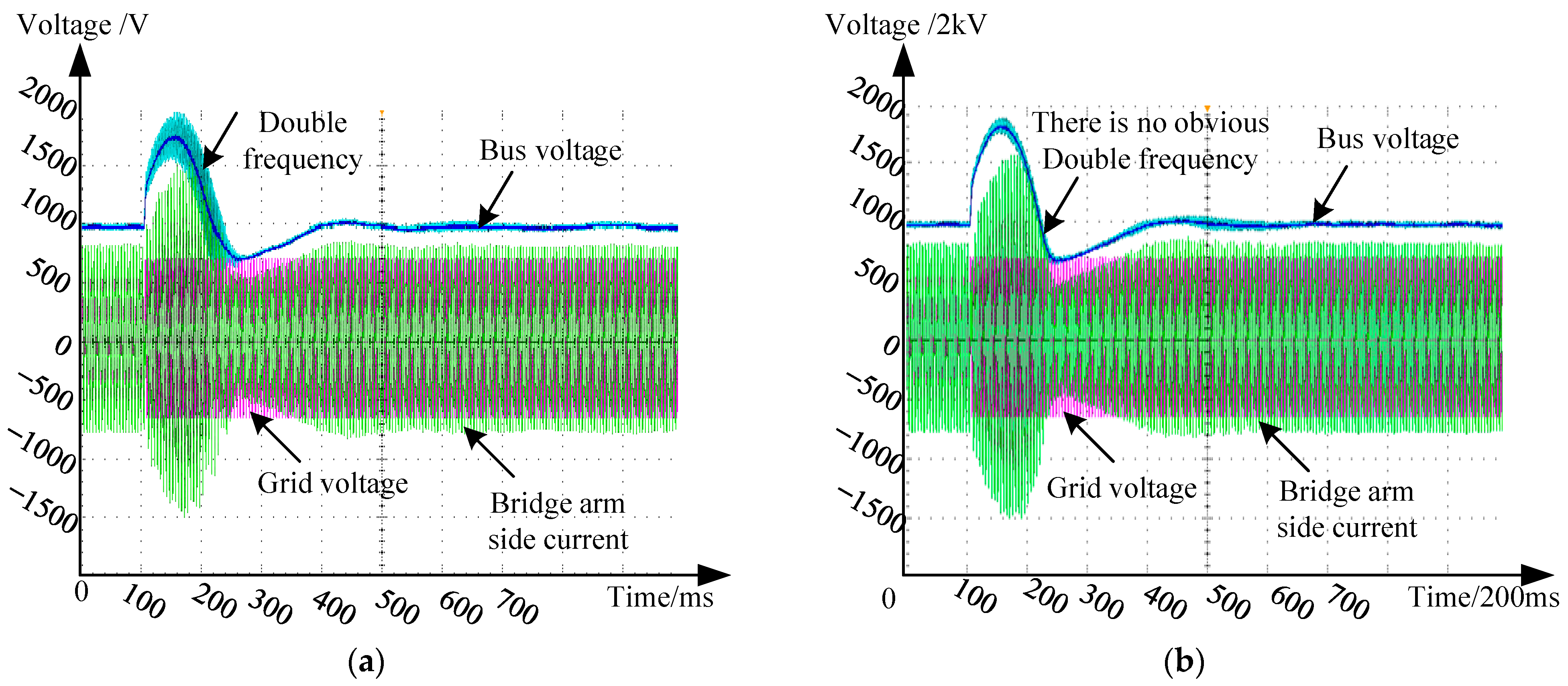
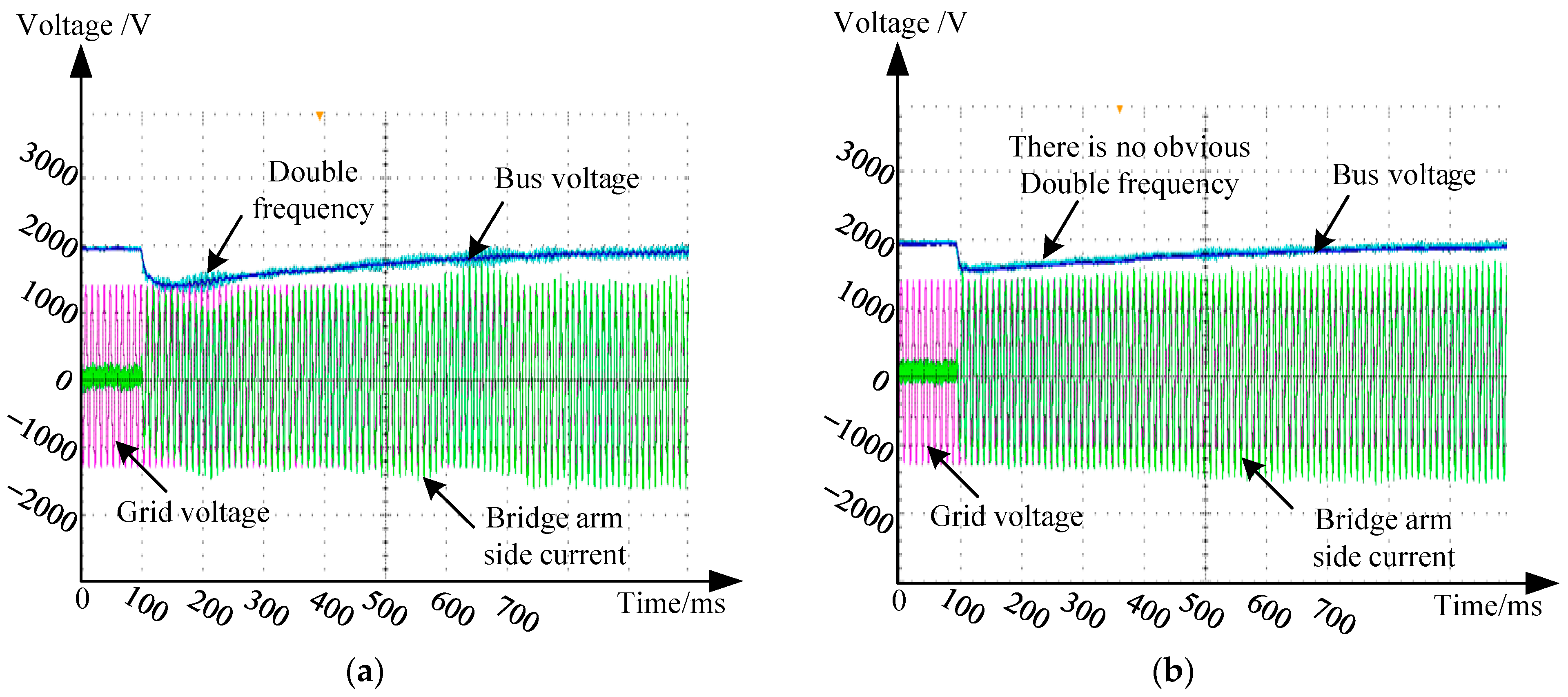
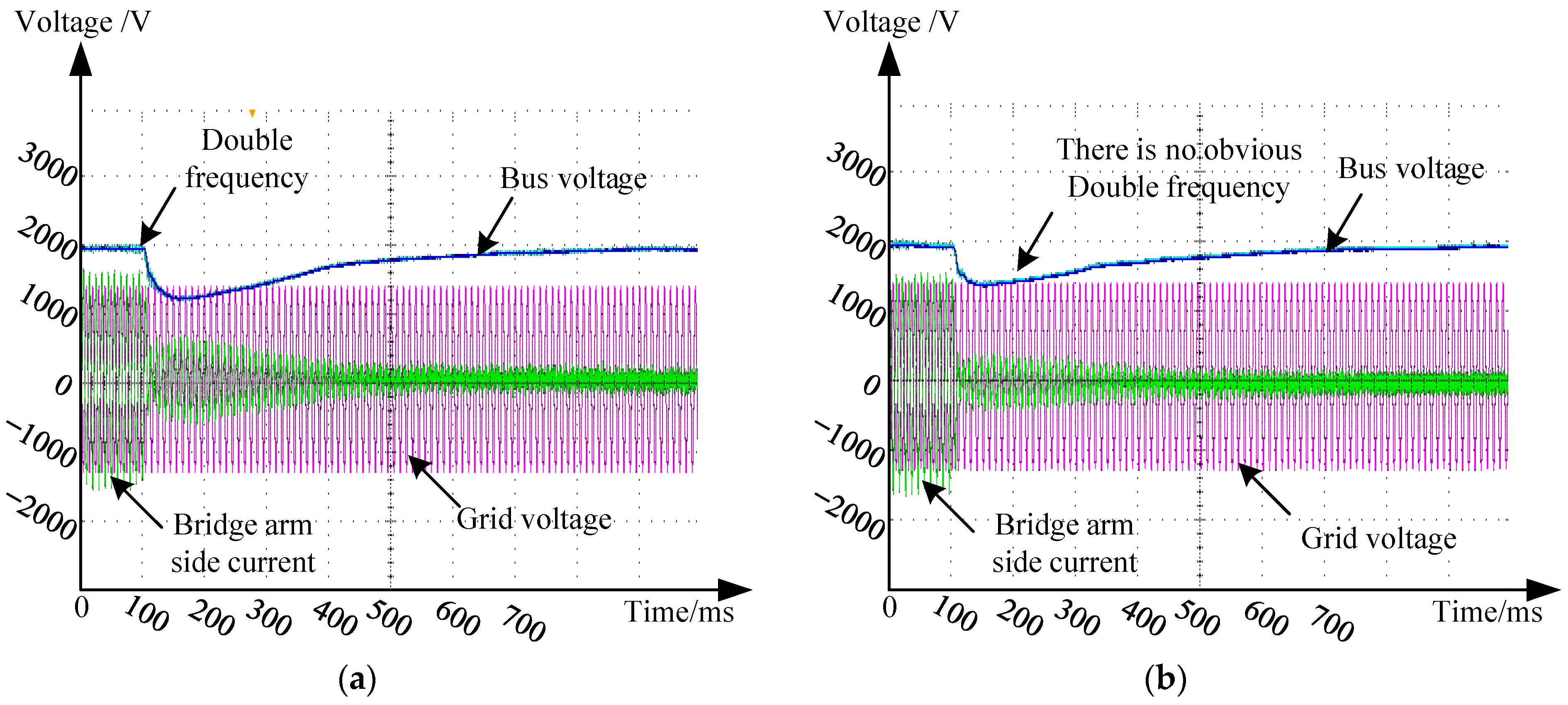
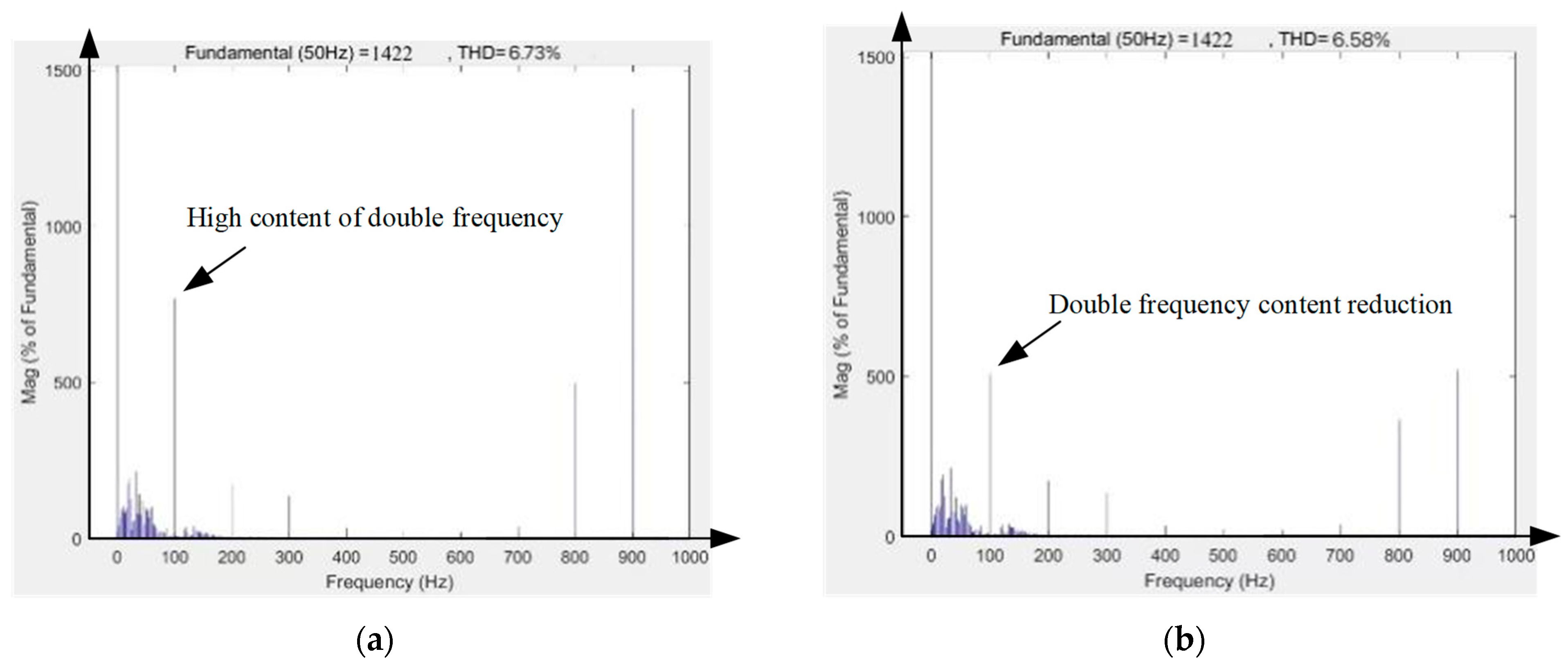
4. Simulation and Experimental Results
Simulation Experiment of Disturbance Suppression Control Strategy on Rectification Side of Power Unit
5. Conclusions
- Engineering impact:
- Economic potential:
- Limitations of Research and Future Work:
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Min, Y.; Ke, C. Research Review on Topology and Control Strategy of Energy Storage Connected to Electrified Railway. High Volt. Eng. 2023, 49, 4069–4083. [Google Scholar]
- Zhou, L. Second Harmonic Injection with Model Predictive Control: Attenuation of DC-Link Pulsations in Single-Phase Inverters. IEEE Trans. Power Electron. 2025, 40, 6529–6538. [Google Scholar] [CrossRef]
- Yan, X.; Li, B. Single-Phase Dual Rotary Phase Shifting Transformer Based Negative Sequence Compensation Method for High-Speed Railway Systems. Trans. China Electrotech. Soc. 2024, 39, 1029. [Google Scholar]
- Zhao, L. Research on Integrated Compensation System of Electrified Railway Supplied by the Scott Hypotenuse. Doctoral Dissertation, Beijing Jiaotong University, Beijing, China, 2023. [Google Scholar]
- Zhou, J.; Pan, Y. Power Unit Control Strategy of the New Type Cophase Power Supply Topology. Electr. Transm. 2014, 44, 36–41. [Google Scholar]
- Zhang, J.; Xu, Y.; Li, Y. Completed compensation strategy research of railway power conditioner for negative-sequence current under unbalanced AC power grids. Proc. CSEE 2020, 40, 3144–3154. [Google Scholar]
- Shu, Z.; Xie, S.; Li, Q. Single-Phase Back-To-Back Converter for Active Power Balancing Reactive Power Compensation and Harmonic Filtering in Traction Power System. IEEE Trans. Power Electron. 2011, 26, 334–343. [Google Scholar] [CrossRef]
- Zhang, C.; Chen, B.; Yuan, J.; Zhong, Y.; Tian, C.; Cai, C. Research on Hybrid Compensation of Power Quality in Same Phase Power Supply System Based on V/V Traction Transformer. J. Electr. Eng. 2015, 30, 496–504. [Google Scholar]
- He, X.; Shu, Z.; Peng, X.; Zhou, Q.; Zhou, Y.; Zhou, Q.; Gao, S. Advanced Cophase Traction Power Supply System Based on Three-Phase to Single-Phase Converter. IEEE Trans. Power Electron. 2014, 29, 5323–5332. [Google Scholar] [CrossRef]
- Shu, Z.; Xie, S.; Lu, K.; Zhao, Y.; Nan, X.; Qiu, D.; Zhou, F.; Gao, S.; Li, Q. Digital Detection Control and Distribution System for Co-phase Traction Power Supply Application. IEEE Trans Ind. Electron. 2013, 60, 1831–1839. [Google Scholar] [CrossRef]
- Cheng, R.; Ding, S.; Jiang, Z.; Ma, Z.; Wang, Y.; Jiang, W.; Liu, C.; Li, J.; Li, G.; Fu, D.; et al. Railway Traction AC in-Phase Power Supply Device Based on Three-Phase Series Voltage Source Symmetrical Transformation. Chinese Patent 101345483A, 31 January 2012. [Google Scholar]
- Li, Z.; Zhang, H. New continuous co-phase traction power supply converter system based on power electronic transformer. Adv. Technol. Electr. Eng. Energy 2018, 37, 3394–3401. [Google Scholar]
- Guo, X.; Wu, W. Comparative Analysis and Digital Implementation of Novel Control Strategies for Grid-Connected Inverters. Trans. China Electrotech. Soc. 2007, 22, 111–116. [Google Scholar]
- Huang, X.; Li, Q. Control strategy of co-phase traction power supply system and simulative analysis. Electr. Power Autom. Equip. 2014, 34, 2006–2014. [Google Scholar]
- Zhao, Y.; Zhu, P.; Qunzhan, L. Co-phase supply test system based on YNvd balanced transformer and simulated load. Power Syst. Prot. Control 2016, 44. [Google Scholar]
- Xu, T.; Yingdong, W.; Qirong, J. A Railway Unified Power Quality Controller Based on Modular Structure for Electric Railway. Autom. Electr. Power Syst. 2012, 36, 101–106. [Google Scholar]
- Yao, J.; Zhang, T. Impacts of Negative Sequence Current and Harmonics in Traction Power Supply System for Electrified Railway on Power System and Compensation Measure. Power Syst. Technol. 2008, 39, 61. [Google Scholar]
- Li, X. Research on Anti-Load Disturbance of Three Level Dual Pwm Converter Based on Dc Bus Current Reconstruction. Master’s Thesis, Xi’an University of Technology, Beilin, China, 2016. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Li, Y. Research on the Double Frequency Suppression Strategy of DC Bus Voltage on the Rectification Side of a Power Unit in a New Type of Same Phase Power Supply System. Electronics 2025, 14, 2047. https://doi.org/10.3390/electronics14102047
Zhou J, Li Y. Research on the Double Frequency Suppression Strategy of DC Bus Voltage on the Rectification Side of a Power Unit in a New Type of Same Phase Power Supply System. Electronics. 2025; 14(10):2047. https://doi.org/10.3390/electronics14102047
Chicago/Turabian StyleZhou, Jinghua, and Yuchen Li. 2025. "Research on the Double Frequency Suppression Strategy of DC Bus Voltage on the Rectification Side of a Power Unit in a New Type of Same Phase Power Supply System" Electronics 14, no. 10: 2047. https://doi.org/10.3390/electronics14102047
APA StyleZhou, J., & Li, Y. (2025). Research on the Double Frequency Suppression Strategy of DC Bus Voltage on the Rectification Side of a Power Unit in a New Type of Same Phase Power Supply System. Electronics, 14(10), 2047. https://doi.org/10.3390/electronics14102047