

Energy Efficiency Optimization of Multi-Hop Relay Networks via a Joint Relay Selection and Power Allocation Strategy

Abstract
1. Introduction
2. Model Establishment
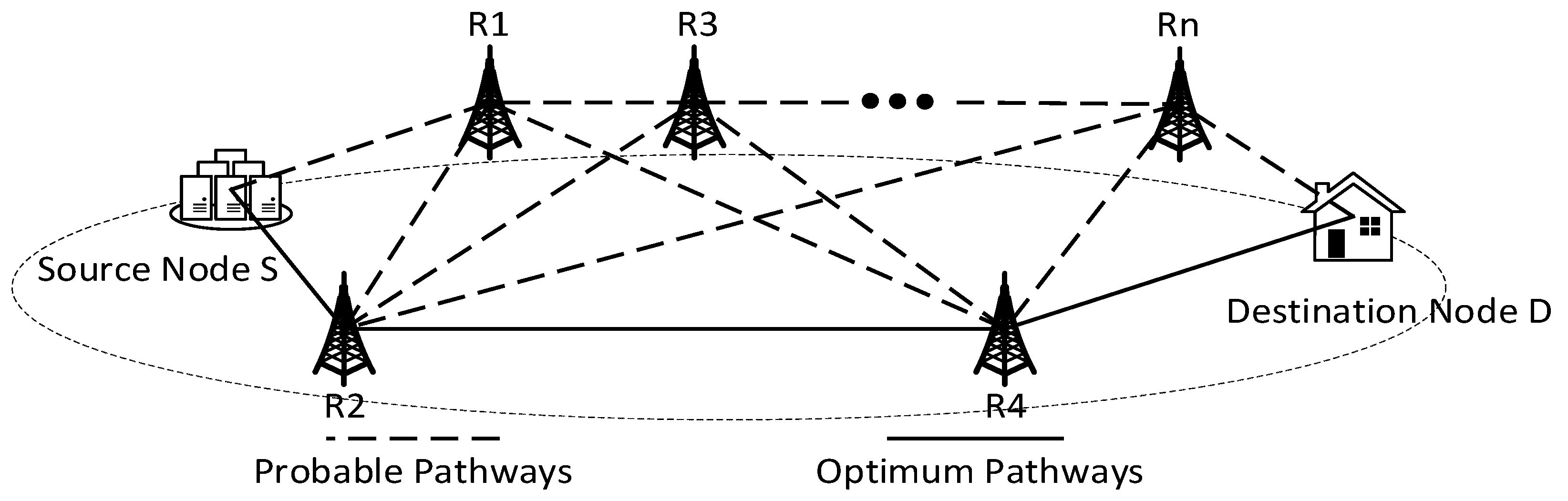
2.1. Description of the System Model
2.2. System Performance Analysis
2.3. Objective Function
3. Algorithm Design and Implementation
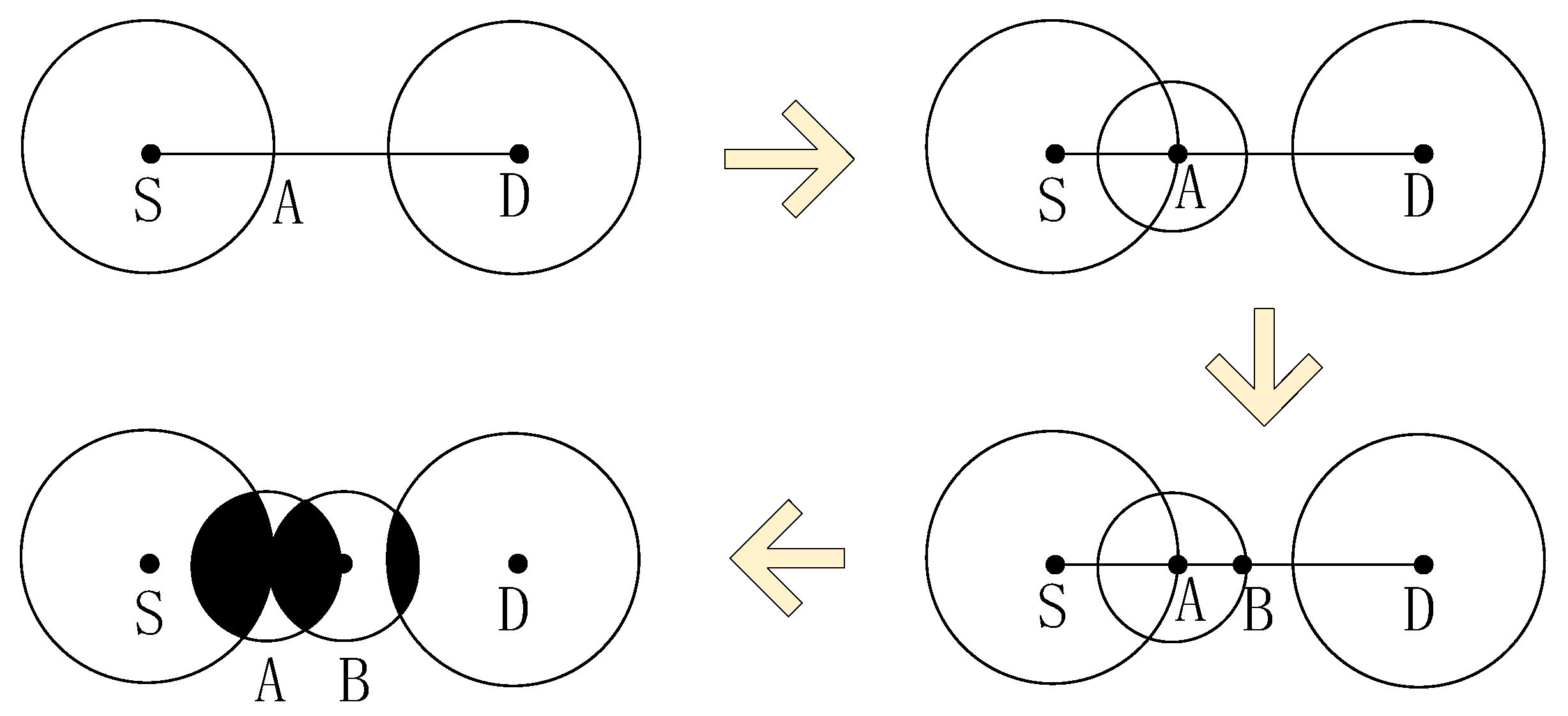
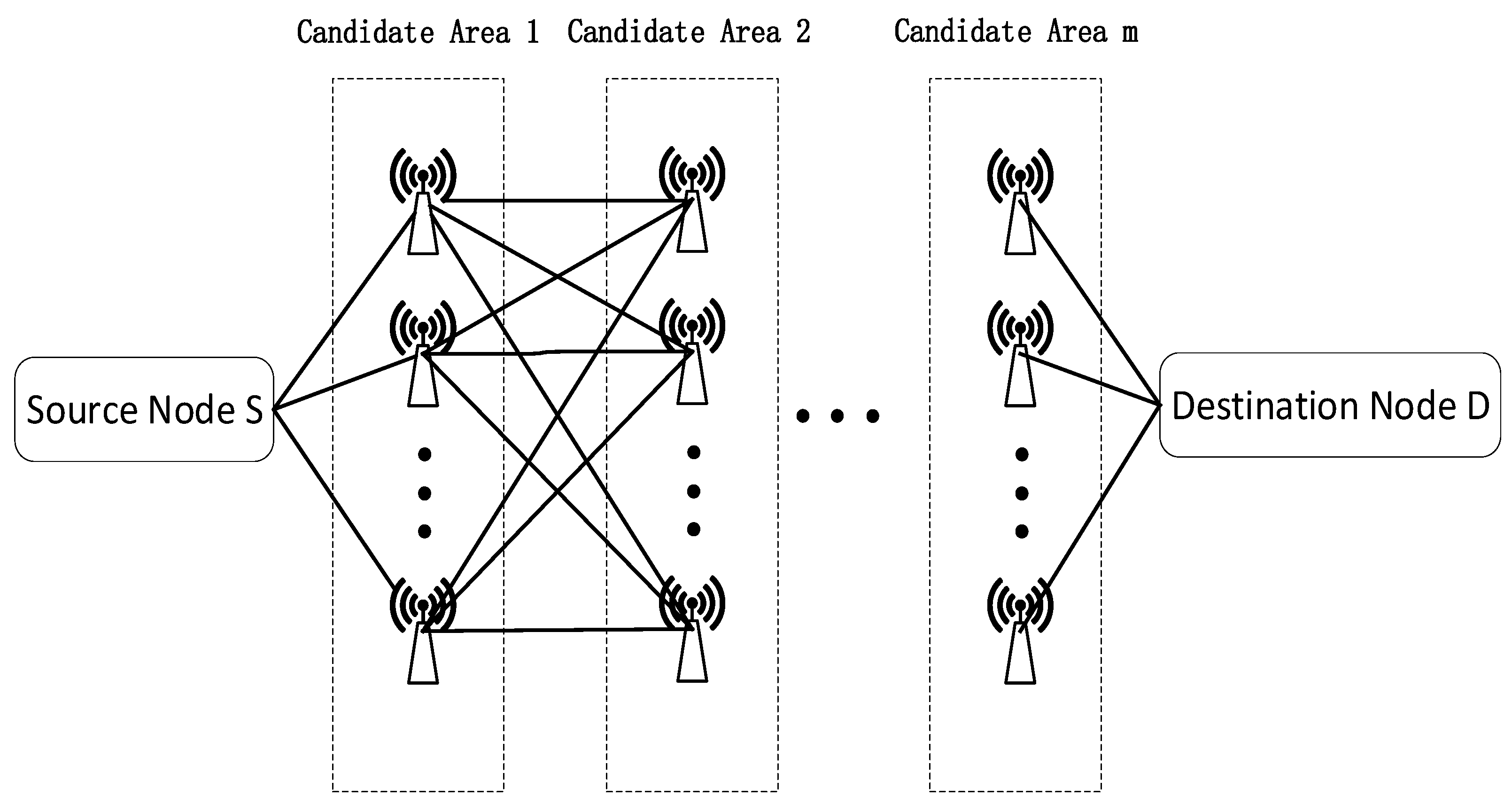
3.1. Node Pre-Screening
3.2. The Improved D* Algorithm in Combination with FMSNR
| Algorithm 1. The D* algorithm based on path loss |
Initialize two lists: open_set and close_set, where open_set is used to store the nodes to be explored and close_set is used to store the nodes that have already been processed.
|
| Algorithm 2. The improved D* algorithm in combination with FMSNR |
|
3.3. The Power Control Algorithm Based on the Dinkelbach Method and the Lagrange Multiplier Method
| Algorithm 3. The power allocation algorithm based on the Dinkelbach method and the Lagrange multiplier method |
The pseudocode is detailed in Appendix C.
|
4. Case Implementation and Analysis
4.1. Case Parameter Setting
4.2. Algorithm Flow
4.3. Case Study
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Correction Statement
Abbreviations
| FMSNR | Forward Maximum Signal–Noise Ratio |
| SNR | Signal-to-Noise Ratio |
| SINR | Signal-to-Interference-plus-Noise Ratio |
| GPC | Global Power Control |
Appendix A
Proof of the Existence of the Maximum Value of a Function
Appendix B
Proof of the Convexity and Concavity of Functions
Appendix C
| Input Output , 1. Initialization: n = 1, w(n), , , , , , , , . 2. do 3. 4. If (A7) 5. (A8) 6. 7. break 8. else 9. n n + 1 10. while do 11. Configure , , and 12. if , and 13. Renew the Lagrange operators , , and as well as 14. Calculation (A9) 15. break 16. end if 17. 18. end while 19. end if 20. end while |
References
- Zheng, C.; Wu, X.; Li, X.; Chen, J.; Lin, Z.; Xiao, Z.; Liu, H. Development of a 230 MHz Interference Source Identification Device for Power Wireless Private Networks. Procedia Comput. Sci. 2022, 203, 350–355. [Google Scholar]
- Zhao, X.; Gan, J.; Xu, W.; Huang, T. A Covariance Matrix-Based Cooperative Spectrum Sensing Algorithm in Electric Wireless Private Network. Mob. Inf. Syst. 2022, 2022, 1420539. [Google Scholar] [CrossRef]
- Li, A.; Liu, L.; Lv, Y.; Bai, Y.; Cui, L. Adaptability Analysis of Wireless Communication Application Scenarios Under New Power Systems. In Proceedings of the 2023 IEEE 11th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 8–10 December 2023; pp. 1588–1592. [Google Scholar]
- Ma, L.; Li, W.; Hou, Y.; Yang, R.; Jia, W.; Qiu, Y. Application of wireless communication technology in ubiquitous power internet of things. In Proceedings of the 2020 IEEE 3rd International Conference on Computer and Communication Engineering Technology (CCET), Beijing, China, 14–16 August 2020; pp. 267–271. [Google Scholar]
- Betriu, P.; Soria, M.; Gutiérrez, J.L.; Llopis, M.; Barlabé, A. An assessment of different relay network topologies to improve Earth–Mars communications. Acta Astronaut. 2023, 206, 72–88. [Google Scholar] [CrossRef]
- Mahapatra, S.N.; Singh, B.K.; Kumar, V. A secure multi-hop relay node selection scheme based data transmission in wireless ad-hoc network via block chain. Multimed. Tools Appl. 2022, 81, 18343–18373. [Google Scholar] [CrossRef]
- Sun, H.; Naraghi-Pour, M.; Sheng, W.; Han, Y. Performance Analysis of Incremental Relaying in Multi-Hop Relay Networks. IEEE Access 2020, 8, 68747–68761. [Google Scholar] [CrossRef]
- Yuan, L.; Zhou, F.; Wu, Q.; Ng, D.W.K. Channel Prediction-Enhanced Intelligent Resource Allocation for Dynamic Spectrum-Sharing Networks. In Proceedings of the ICC 2024-IEEE International Conference on Communications, Denver, CO, USA, 9–13 June 2024; pp. 2767–2772. [Google Scholar]
- Alvi, A.S.; Hussain, R.; Hasan, U.Q.; Malik, S.A. Improved Buffer-Aided Multi-Hop Relaying with Reduced Outage and Packet Delay in Cognitive Radio Networks. Electronics 2019, 8, 895. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, X.; Liu, H.; Wang, X.; Huang, L. RIS-Aided MmWave Hybrid Relay Network Based on Multi-Agent Deep Reinforcement Learning. Mob. Netw. Appl. 2024, 29, 825–840. [Google Scholar] [CrossRef]
- Dai, J.; Li, X.; Han, S.; Liu, Z.; Zhao, H.; Yan, L. Multi-hop relay selection for underwater acoustic sensor networks: A dynamic combinatorial multi-armed bandit learning approach. Comput. Netw. 2024, 242, 110242. [Google Scholar] [CrossRef]
- Kravchuk, S.; Afanasieva, L. “Best” relay selection algorithm for wireless networks with cooperative relaying. In Proceedings of the 2019 International Conference on Information and Telecommunication Technologies and Radio Electronics (UkrMiCo), Odessa, Ukraine, 9–13 September 2019; pp. 1–4. [Google Scholar]
- Li, Q.L.; Dou, Z.; Li, Z.G.; He, Q.H. Adaptive Relay Selection Algorithm for Maritime Multi-hop Communication Networks. In Proceedings of the 2022 National Microwave and Millimeter Wave Conference (Volume II), Harbin, China, 12 August 2022. (In Chinese). [Google Scholar] [CrossRef]
- Zhang, G.; Yan, H.; Zeng, Y.; Cui, M.; Liu, Y. Trajectory optimization and power allocation for multi-hop UAV relaying communications. IEEE Access 2018, 6, 48566–48576. [Google Scholar] [CrossRef]
- Khodmi, A.; Benrejeb, S.; Choukair, Z. Iterative water filling power allocation and relay selection based on two-hop relay in 5G/heterogeneous ultra dense network. In Proceedings of the 2018 Seventh International Conference on Communications and Networking (ComNet), Hammamet, Tunisia, 1–3 November 2018; pp. 1–6. [Google Scholar]
- Zhu, J.; Xie, Z.; Jiang, Z.; Lin, P.; Zhu, J.; She, X.; Chen, P. A Joint Relay Selection and Power Allocation Strategy for Multi-Hop D2D Communications. In Proceedings of the 2024 IEEE/CIC International Conference on Communications in China (ICCC), Hangzhou, China, 7–9 August 2024; pp. 1087–1091. [Google Scholar]
- Basak, S.; Acharya, T. Spectrum-aware outage minimizing cooperative routing in cognitive radio sensor networks. Wirel. Netw. 2020, 26, 1069–1084. [Google Scholar] [CrossRef]
- Wang, X.; Jin, T.; Qian, Z.H.; Hu, L.S.; Wang, X. Research on Energy Efficiency Optimization Algorithm for D2D Relay-assisted Communication. J. Commun. 2020, 41, 71–79. (In Chinese) [Google Scholar]
- Zhang, S.B.; Chen, C.; Li, Y. Power Control Algorithm for Multi-hop Relay Communication System Based on Energy Efficiency and Delay. J. Nanjing Univ. Posts Telecommun. Nat. Sci. Ed. 2021, 41, 1–8. (In Chinese) [Google Scholar] [CrossRef]
- Akande, A.O.; Agubor, C.K.; Semire, F.A.; Akinde, O.K.; Adeyemo, Z.K. Intelligent Empirical Model for Interference Mitigation in 5G Mobile Network at Sub-6 GHz Transmission Frequency. Int. J. Wirel. Inf. Netw. 2023, 30, 287–305. [Google Scholar] [CrossRef]
- Wang, R.; Liu, J.; Zhang, G.; Huang, S.; Yuan, M. Energy Efficient Power Allocation for Relay-Aided D2D Communications in 5G Networks. China Commun. 2017, 14, 54–64. [Google Scholar] [CrossRef]
- Suanpang, P.; Jamjuntr, P. Optimizing Autonomous UAV Navigation with D* Algorithm for Sustainable Development. Sustainability 2024, 16, 7867. [Google Scholar] [CrossRef]
- Dinkelbach, W. On nonlinear fractional programming. Manag. Sci. 1967, 13, 492–498. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Values |
|---|---|
| Communication bandwidth /MHz | 1 |
| Node power range /dBm | [10, 40] |
| Rest communication power /dBm | 10 |
| Noise power /dBm | −114 |
| Minimum transfer rate /() | 5 |
| Cell range/ | 4000 × 4000 |
| Distance between nodes/km | 4 |
| Base station antenna height /m | 35 |
| Terminal antenna height /m | 1.2 |
| Number of network relay nodes/pieces | 10–100 |
| Schemes | Interrupt Probability | Number of Relay Hops |
|---|---|---|
| D* | 0.136 | 3 |
| FMSNR-A* | 0.051 | 5 |
| FMSNR-D* | 0.048 | 4 |
| FMSNR | 0.031 | 9 |
| Number of Relay Hops | The Scheme in This Paper Is Relative to the Power Allocation Efficiency Increase Rate Based on Channel Gain | The Scheme in This Paper Is Relative to the Equal Power Allocation Efficiency Increase Rate | The Scheme in This Paper Is Relative to the Iterative Water-Filling Algorithm Efficiency Increase Rate |
|---|---|---|---|
| 1 | 9% | 29% | 5% |
| 2 | 13% | 36% | 7% |
| 3 | 15% | 46% | 10% |
| 4 | 20% | 59% | 12% |
| 5 | 20% | 60% | 13% |
| 6 | 20% | 65% | 14% |
| 7 | 18% | 66% | 13% |
| 8 | 21% | 69% | 15% |
| 9 | 22% | 73% | 16% |
| 10 | 26% | 83% | 18% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, D.; Wan, L.; He, S.; Xu, G. Energy Efficiency Optimization of Multi-Hop Relay Networks via a Joint Relay Selection and Power Allocation Strategy. Electronics 2025, 14, 2017. https://doi.org/10.3390/electronics14102017
Li D, Wan L, He S, Xu G. Energy Efficiency Optimization of Multi-Hop Relay Networks via a Joint Relay Selection and Power Allocation Strategy. Electronics. 2025; 14(10):2017. https://doi.org/10.3390/electronics14102017
Chicago/Turabian StyleLi, Dongxu, Linmao Wan, Sheng He, and Gang Xu. 2025. "Energy Efficiency Optimization of Multi-Hop Relay Networks via a Joint Relay Selection and Power Allocation Strategy" Electronics 14, no. 10: 2017. https://doi.org/10.3390/electronics14102017
APA StyleLi, D., Wan, L., He, S., & Xu, G. (2025). Energy Efficiency Optimization of Multi-Hop Relay Networks via a Joint Relay Selection and Power Allocation Strategy. Electronics, 14(10), 2017. https://doi.org/10.3390/electronics14102017