
Integrated Sensing and Communication Beamforming Design in RIS-Assisted Symbiotic Radio System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- We develop novel beamforming designs of ISAC-SR systems in both single-user and multi-user scenarios. The joint active transmit beamforming and passive reflecting beamforming design problem is formulated to maximize the transmission rate of the RIS-aided link under a given SINR constraint for the primary communication and a given beampattern constraint for the sensing performance.
- In the single-user case, we address the formulated non-convex problem by decomposing the problem into two subproblems. For the first subproblem, a covariance matrix is proposed to construct the sensing and communication beamforming. Then, the subproblem is solved via SDR and Dinkelbach methods. For the second subproblem, based on the properties of matrix trace operations, we transform the objective function and the intended optimization problem can be solved by using SDR.
- In the multi-user case, the SCA method is adopted to approximate the objective function via first-order Taylor expansion, which transforms the original problem into a tractable convex problem. Moreover, the rank-one property of the relaxed covariance matrix is rigorously proven, so that the beamforming can be derived by performing eigenvalue decomposition. Numerical results validate the effectiveness of our proposed schemes.
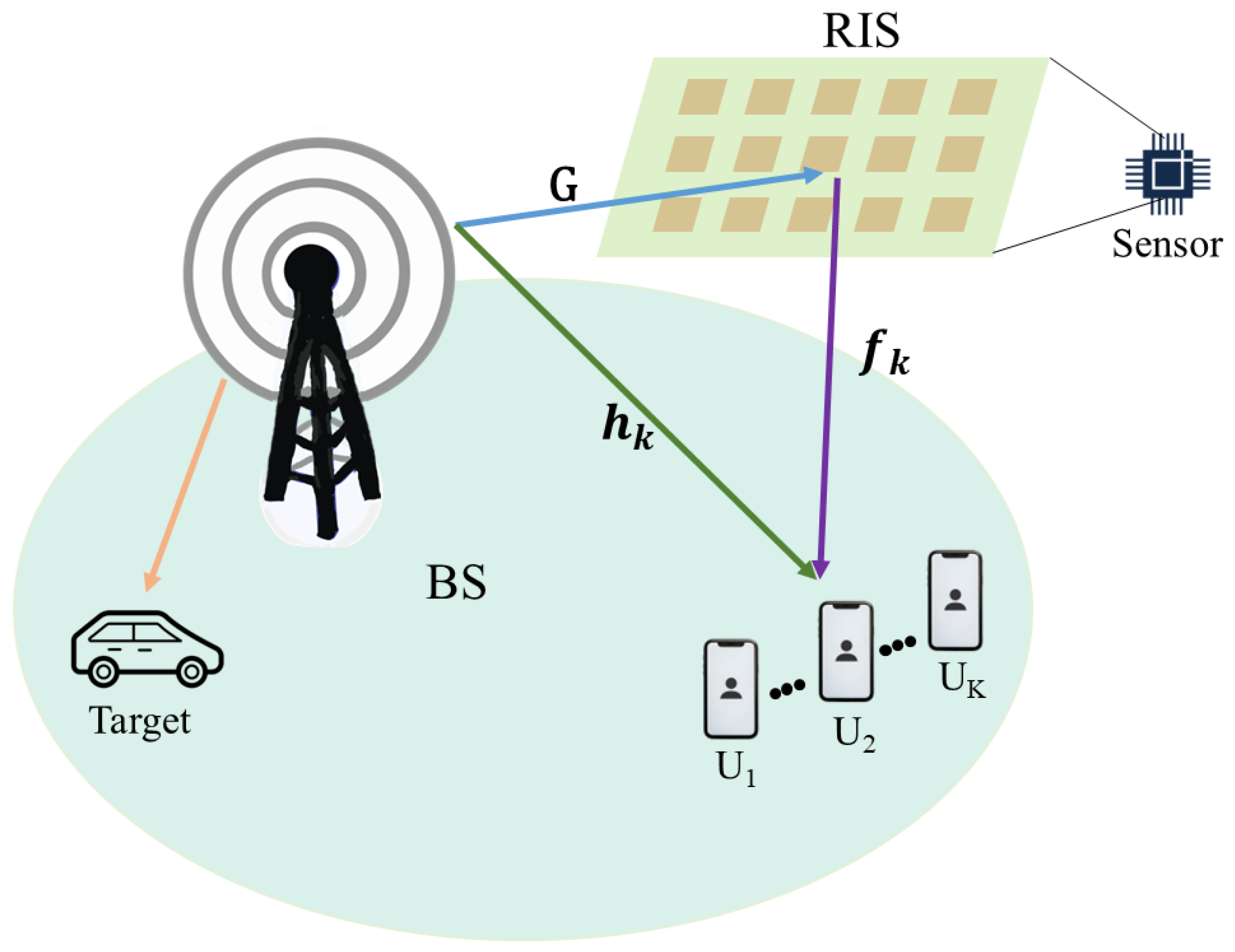
2. System Model
2.1. Sensing Performance Guarantee
2.2. Communication Performance Metric
3. Beamforming Design in Single-User Case
3.1. Problem Formulation
3.2. Beamforming Vector Optimization
3.3. RIS Reflection Coefficient Optimization
| Algorithm 1 The Proposed AO Algorithm for Solving (10) |
| 1: Input: Set the iteration counter , the convergence tolerance , initial the objective function value , initial the beamforming vector , and the RIS phase shift is randomly generated. |
| 2: while do |
| 3: Given , obtain the beamforming vector by solving (13). |
| 4: Given , obtain the RIS phase shift by solving (15). |
| 5: Update the objective function value by (14a). |
| 6: Set ; |
| 7: end while |
| 8: Output: . |
4. Beamforming Design in Multi-User Case
4.1. Problem Formulation
4.2. Beamforming Vector Optimization
4.3. RIS Reflection Coefficient Optimization
| Algorithm 2 The Proposed AO Algorithm for Sum Rate Maximization |
| 1: Input: Set the iteration counter , the convergence tolerance , initial the objective function value , initial the beamforming vector , and the RIS phase shift is randomly generated. |
| 2: while do |
| 3: Given , derive by solving (19). |
| 4: Given , obtain by solving (26). |
| 5: Calculate by (16) to update the objective function value . |
| 6: Set ; |
| 7: end while |
| 8: Output: . |
4.4. Computational Complexity Analysis
5. Numerical Results
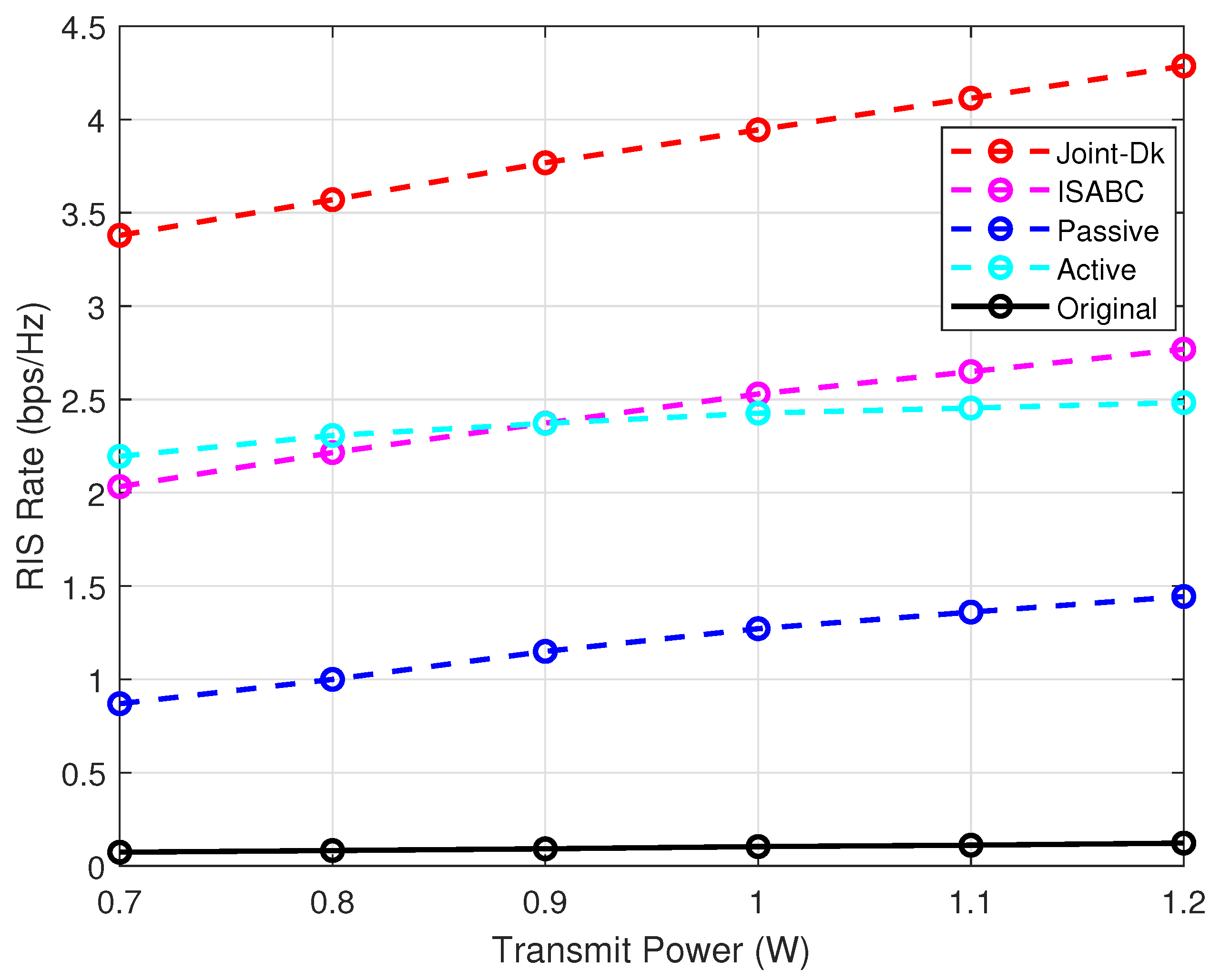
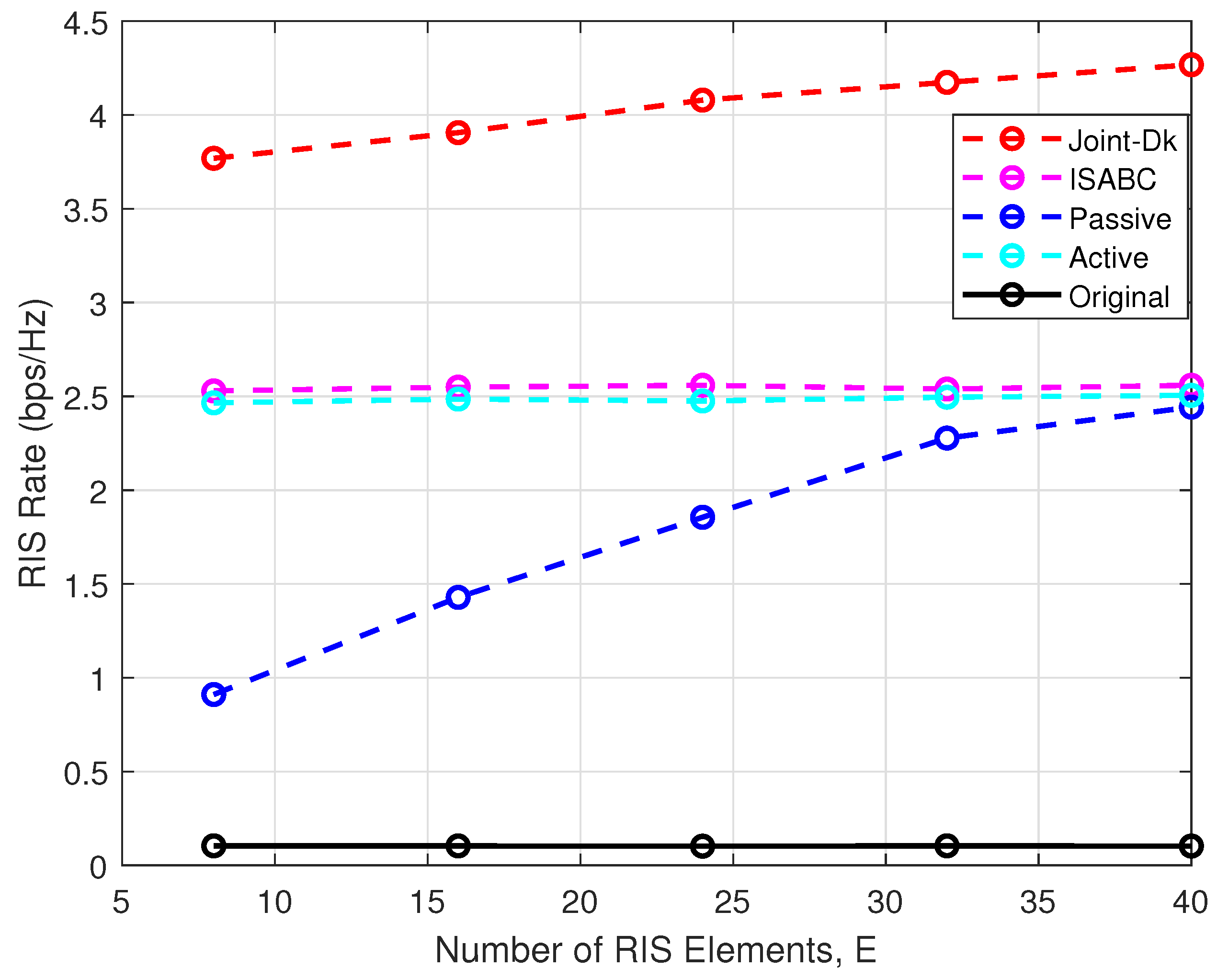
- Joint-Dk: This legend represents the proposed Dinkelbach scheme to solve the optimization problem in the ISAC-SR system considered with a single user. In Joint-Dk, the transmit beamforming vectors at the BS and the RIS reflection coefficient are jointly optimized, as specified in Section 3.
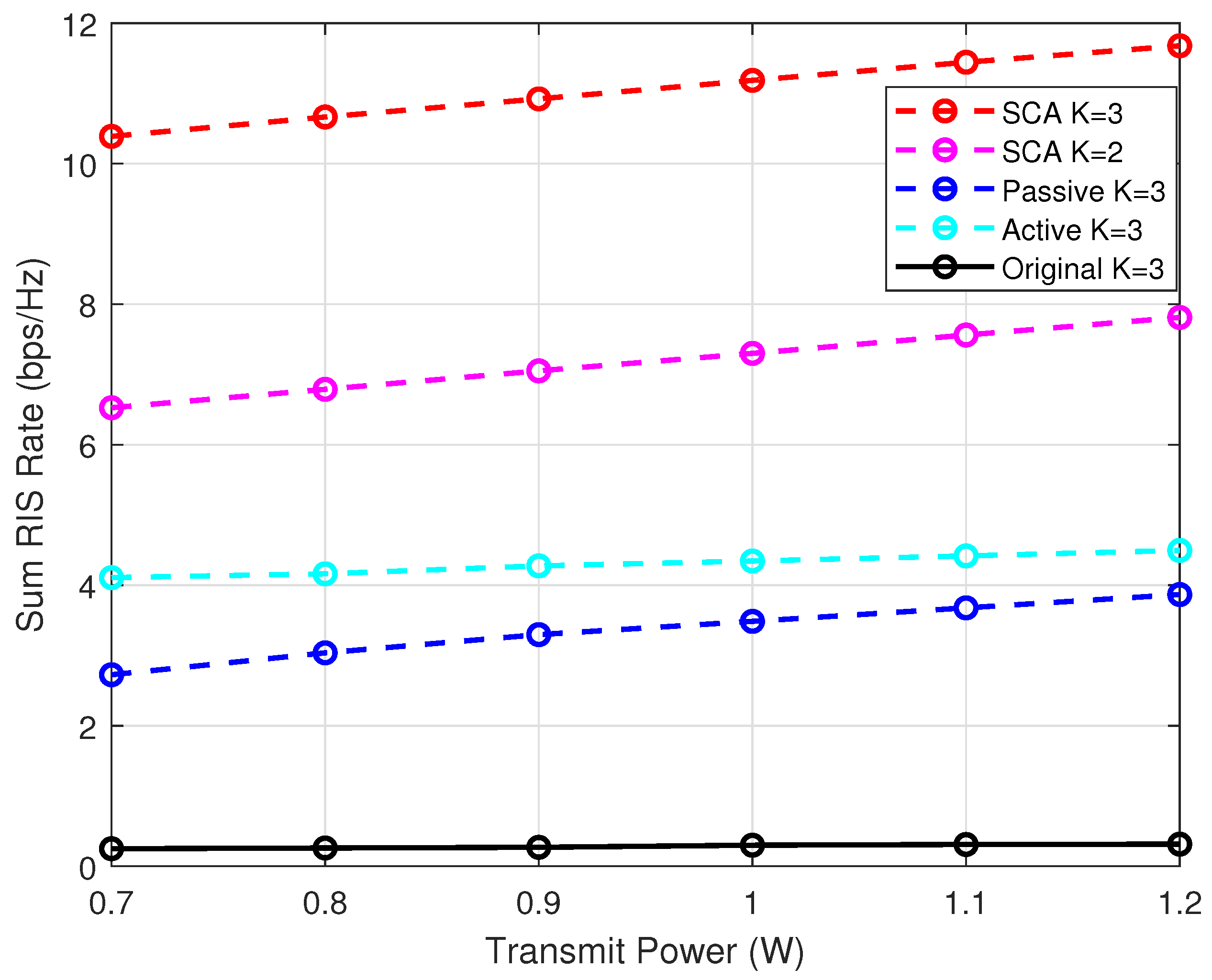
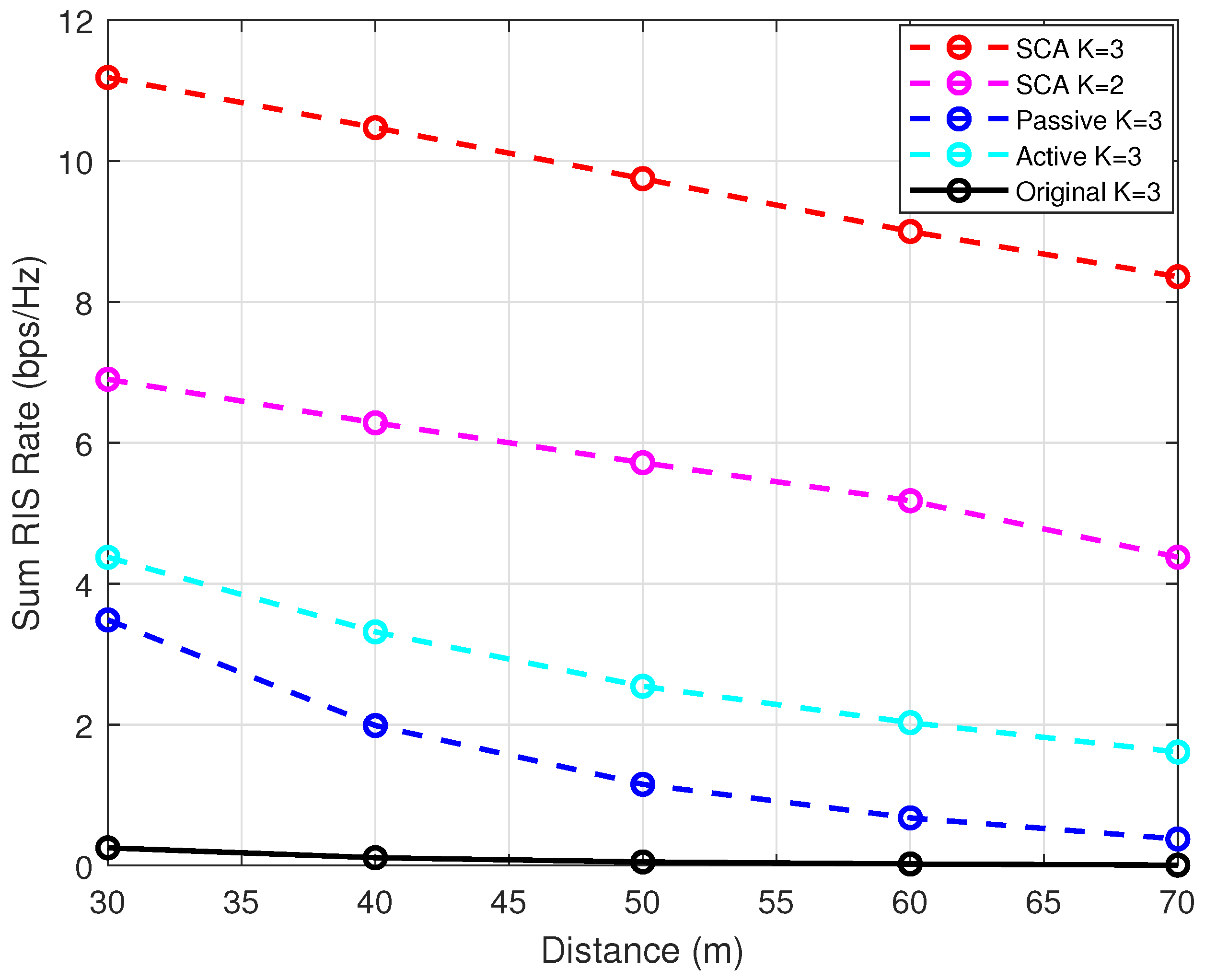
- Joint-SCA: This legend represents the proposed SCA scheme to solve the optimization problem in the ISAC-SR system considered with multiple users. In Joint-SCA, the transmit beamforming vectors at the BS and the RIS reflection coefficient are jointly optimized, as specified in Section 4.
- ISABC [18]: This legend represents a scheme that is specifically designed for the Integrated Sensing and Backscatter Communication (ISABC) system. In this architecture, the backscatter tag serves as the functional equivalent of the RIS in the SR system. The methodology is restricted to the single-user scenario. To ensure a fair comparative analysis, all critical parameters are maintained at consistent values across experimental configurations.
- Passive: This legend represents a simplified scheme, where the RIS reflection coefficient is optimized. The transmit beamforming vectors are, respectively, set as , , which ensures the transmit power constraint of the BS.
- Active: This legend represents a simplified scheme, where the transmit beamforming vectors at the BS are optimized. The RIS reflection coefficient is randomly generated.
- Original: This legend represents a simplified scheme, where the transmit beamforming vectors at the BS are, respectively, set as , and the RIS reflection coefficient is randomly generated.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 6G | Sixth generation |
| ISAC | Integrated sensing and communication |
| MIMO | Multiple-input multiple-output |
| BS | base station |
| RIS | Reconfigurable intelligent surface |
| DFRC | Dual-function radar communication |
| SINR | Signal-to-noise-plus-interference ratio |
| SNR | Signal-to-noise ratio |
| OFDM | Orthogonal frequency division multiplexing |
| SR | Symbiotic radio |
| BD | Backscatter device |
| QoS | Quality of service |
| CDMA | Code division multiple access |
| TDMA | Time division multiple access |
| AO | alternating optimization |
| SCA | Successive convex approximation |
| SDR | Semidefinite relaxation |
| AWGN | Additive White Gaussian Noise |
| LoS | Line-of-sight |
| MSE | Mean square error |
| SIC | Successive interference cancellation |
| KKT | Karush-Kuhn-Tucker |
| SDP | Semidefinite programming problem |
Appendix A
References
- Zhang, J.A.; Liu, F.; Masouros, C.; Heath, R.W.; Feng, Z.; Zheng, L.; Petropulu, A. An overview of signal processing techniques for joint communication and radar sensing. IEEE J. Sel. Top. Signal Process. 2021, 15, 1295–1315. [Google Scholar] [CrossRef]
- Liu, F.; Masouros, C.; Petropulu, A.P.; Griffiths, H.; Hanzo, L. Joint radar and communication design: Applications, state-of-the-art, and the road ahead. IEEE Trans. Commun. 2020, 68, 3834–3862. [Google Scholar] [CrossRef]
- Tan, D.K.P.; He, J.; Li, Y.; Bayesteh, A.; Chen, Y.; Zhu, P.; Tong, W. Integrated sensing and communication in 6G: Motivations, use cases, requirements, challenges and future directions. In Proceedings of the 2021 1st IEEE International Online Symposium on Joint Communications & Sensing (JC&S), Dresden, Germany, 23–24 February 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Saruthirathanaworakun, R.; Peha, J.M.; Correia, L.M. Opportunistic sharing between rotating radar and cellular. IEEE J. Sel. Areas Commun. 2012, 30, 1900–1910. [Google Scholar] [CrossRef]
- Liu, F.; Masouros, C.; Li, A.; Ratnarajah, T. Robust MIMO beamforming for cellular and radar coexistence. IEEE Wirel. Commun. Lett. 2017, 6, 374–377. [Google Scholar] [CrossRef]
- Khawar, A.; Abdelhadi, A.; Clancy, C. Target detection performance of spectrum sharing MIMO radars. IEEE Sens. J. 2015, 15, 4928–4940. [Google Scholar] [CrossRef]
- Khawar, A.; Abdelhadi, A.; Clancy, T.C. Coexistence analysis between radar and cellular system in LoS channel. IEEE Antennas Wirel. Propag. Lett. 2015, 15, 972–975. [Google Scholar] [CrossRef]
- Liu, F.; Zhou, L.; Masouros, C.; Li, A.; Luo, W.; Petropulu, A. Toward dual-functional radar-communication systems: Optimal waveform design. IEEE Trans. Signal Process. 2018, 66, 4264–4279. [Google Scholar] [CrossRef]
- Liu, Y.; Eldar, Y.C. Joint radar-communications strategies for autonomous vehicles. IEEE Signal Process. Mag. 2020, 1053. [Google Scholar] [CrossRef]
- Moghaddasi, J.; Wu, K. Multifunctional transceiver for future radar sensing and radio communicating data-fusion platform. IEEE Access 2016, 4, 818–838. [Google Scholar] [CrossRef]
- Liu, F.; Masouros, C.; Li, A.; Sun, H.; Hanzo, L. MU-MIMO communications with MIMO radar: From co-existence to joint transmission. IEEE Trans. Wirel. Commun. 2018, 17, 2755–2770. [Google Scholar] [CrossRef]
- Liu, X.; Huang, T.; Shlezinger, N.; Liu, Y.; Zhou, J.; Eldar, Y.C. Joint transmit beamforming for multiuser MIMO communications and MIMO radar. IEEE Trans. Signal Process. 2020, 68, 3929–3944. [Google Scholar] [CrossRef]
- Leyva, L.; Castanheira, D.; Silva, A.; Gameiro, A. Hybrid Beamforming Design for Communication-Centric ISAC. IEEE Sens. J. 2024, 24, 21179–21190. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Z.; Du, Y.; Chen, Y.; Yu, F.R. Generalized transceiver beamforming for DFRC with MIMO radar and MU-MIMO communication. IEEE J. Sel. Areas Commun. 2022, 40, 1795–1808. [Google Scholar] [CrossRef]
- Yang, C.; Wang, X.; Ni, W.; Jiang, Y. Optimal Beamforming for MIMO DFRC Systems with Transmit Covariance Constraints. IEEE Trans. Signal Process. 2025, 73, 601–616. [Google Scholar] [CrossRef]
- Yang, G.; Liang, Y.C.; Zhang, R.; Pei, Y. Modulation in the air: Backscatter communication over ambient OFDM carrier. IEEE Trans. Commun. 2017, 66, 1219–1233. [Google Scholar] [CrossRef]
- Huang, T.; Xu, X.; Kuai, X.; Liang, Y.C.; Zhao, X. Integrated sensing and communication for ambient backscatter communication systems. In Proceedings of the 2022 IEEE 22nd International Conference on Communication Technology (ICCT), Nanjing, China, 11–14 November 2022; pp. 260–265. [Google Scholar] [CrossRef]
- Galappaththige, D.; Tellambura, C.; Maaref, A. Integrated sensing and backscatter communication. IEEE Wirel. Commun. Lett. 2023, 12, 2043–2047. [Google Scholar] [CrossRef]
- Wang, X.; Fei, Z.; Wu, Q. Integrated sensing and communication for RIS-assisted backscatter systems. IEEE Internet Things J. 2023, 10, 13716–13726. [Google Scholar] [CrossRef]
- Long, R.; Liang, Y.C.; Guo, H.; Yang, G.; Zhang, R. Symbiotic radio: A new communication paradigm for passive Internet of Things. IEEE Internet Things J. 2019, 7, 1350–1363. [Google Scholar] [CrossRef]
- Han, S.; Liang, Y.C.; Sun, G. The design and optimization of random code assisted multi-BD symbiotic radio system. IEEE Trans. Wirel. Commun. 2021, 20, 5159–5170. [Google Scholar] [CrossRef]
- Guo, H.; Liang, Y.C.; Long, R.; Xiao, S.; Zhang, Q. Resource allocation for symbiotic radio system with fading channels. IEEE Access 2019, 7, 34333–34347. [Google Scholar] [CrossRef]
- Yang, H.; Ye, Y.; Liang, K.; Chu, X. Energy efficiency maximization for symbiotic radio networks with multiple backscatter devices. IEEE Open J. Commun. Soc. 2021, 2, 1431–1444. [Google Scholar] [CrossRef]
- Chu, Z.; Hao, W.; Xiao, P.; Khalily, M.; Tafazolli, R. Resource allocations for symbiotic radio with finite blocklength backscatter link. IEEE Internet Things J. 2020, 7, 8192–8207. [Google Scholar] [CrossRef]
- Long, R.; Guo, H.; Zhang, L.; Liang, Y.C. Full-duplex backscatter communications in symbiotic radio systems. IEEE Access 2019, 7, 21597–21608. [Google Scholar] [CrossRef]
- Zhang, Q.; Liang, Y.C.; Poor, H.V. Reconfigurable intelligent surface assisted MIMO symbiotic radio networks. IEEE Trans. Commun. 2021, 69, 4832–4846. [Google Scholar] [CrossRef]
- Chen, H.; Yang, G.; Liang, Y.C. Joint active and passive beamforming for reconfigurable intelligent surface enhanced symbiotic radio system. IEEE Wirel. Commun. Lett. 2021, 10, 1056–1060. [Google Scholar] [CrossRef]
- Xu, X.; Liang, Y.C.; Yang, G.; Zhao, L. Reconfigurable Intelligent Surface Empowered Symbiotic Radio Over Broadcasting Signals. IEEE Trans. Commun. 2021, 69, 7003–7016. [Google Scholar] [CrossRef]
- Hakimi, A.; Zargari, S.; Tellambura, C. Integrated Sensing and Communication With Symbiotic Radio and RIS-Assisted Backscatter. IEEE Wirel. Commun. Lett. 2025, 14, 38–42. [Google Scholar] [CrossRef]
- Dinkelbach, W. On nonlinear fractional programming. Manag. Sci. 1967, 13, 492–498. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.2. 2020. Available online: https://cvxr.com/cvx/ (accessed on 13 May 2025).
- Sidiropoulos, N.D.; Davidson, T.N.; Luo, Z.Q. Transmit beamforming for physical-layer multicasting. IEEE Trans. Signal Process. 2006, 54, 2239–2251. [Google Scholar] [CrossRef]
- Hakimi, A.; Zargari, S.; Tellambura, C.; Herath, S. Sum rate maximization of MIMO monostatic backscatter networks by suppressing residual self-interference. IEEE Trans. Commun. 2022, 71, 512–526. [Google Scholar] [CrossRef]
- Fuhrmann, D.R.; San Antonio, G. Transmit beamforming for MIMO radar systems using signal cross-correlation. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 171–186. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, X. Integrated Sensing and Communication Beamforming Design in RIS-Assisted Symbiotic Radio System. Electronics 2025, 14, 2016. https://doi.org/10.3390/electronics14102016
Wang Y, Wang X. Integrated Sensing and Communication Beamforming Design in RIS-Assisted Symbiotic Radio System. Electronics. 2025; 14(10):2016. https://doi.org/10.3390/electronics14102016
Chicago/Turabian StyleWang, Yang, and Xin Wang. 2025. "Integrated Sensing and Communication Beamforming Design in RIS-Assisted Symbiotic Radio System" Electronics 14, no. 10: 2016. https://doi.org/10.3390/electronics14102016
APA StyleWang, Y., & Wang, X. (2025). Integrated Sensing and Communication Beamforming Design in RIS-Assisted Symbiotic Radio System. Electronics, 14(10), 2016. https://doi.org/10.3390/electronics14102016