
Energy Storage Converter Off-Grid Parallel Cooperative Control Based on CAN Bus

 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
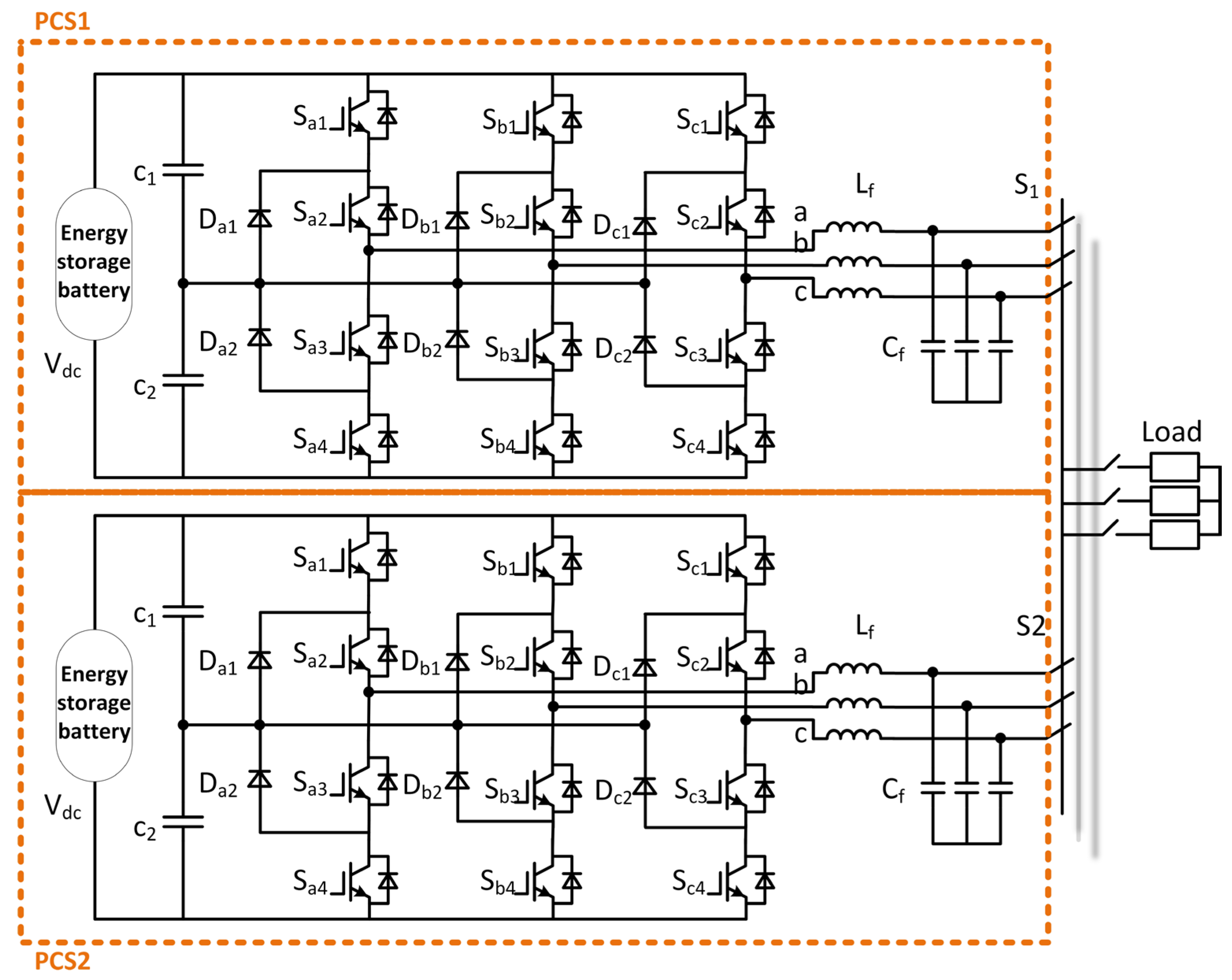
2. PCS Parallel Topology Structure
3. PCS Off-Grid Parallel Control Strategy
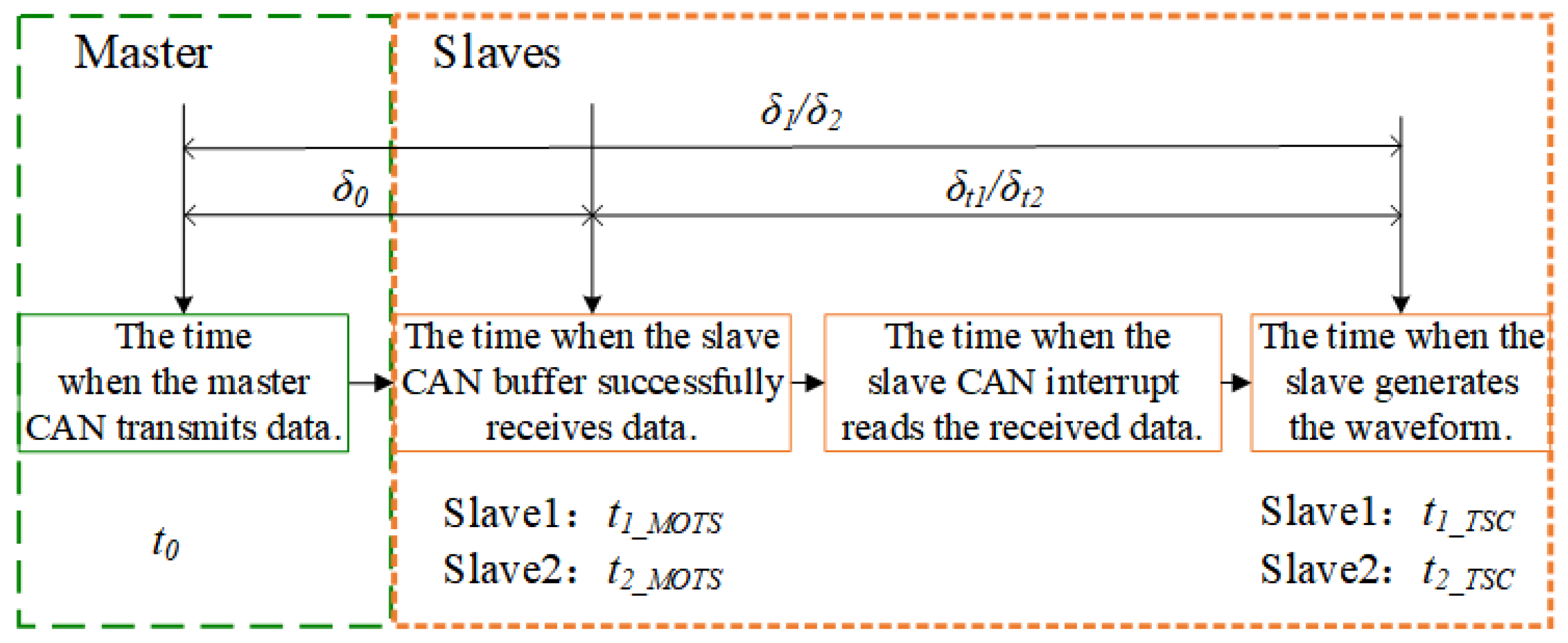
3.1. High-Precision Phase Synchronous Control
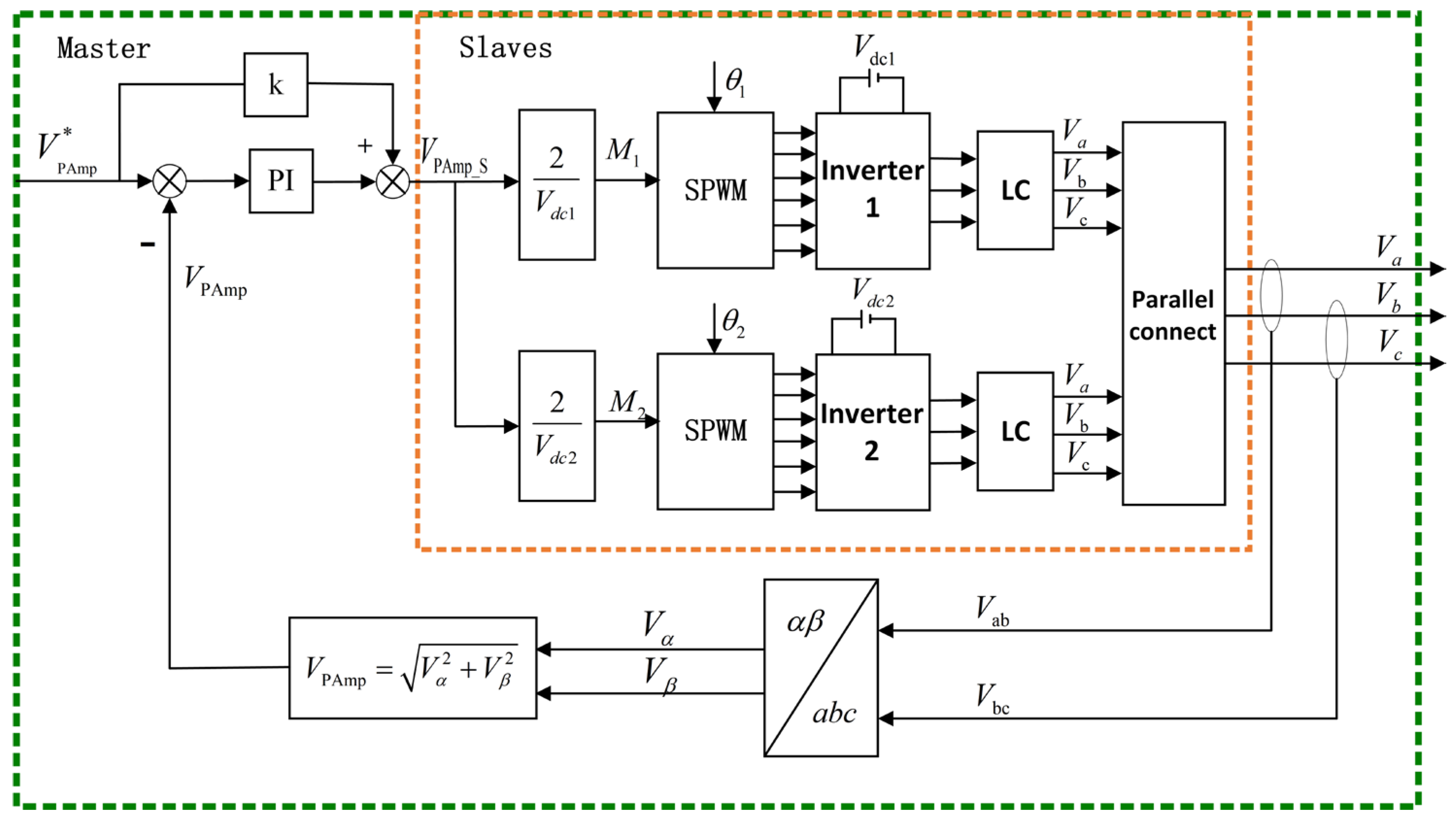
3.2. Parallel Voltage Source Equal Amplitude Control
3.3. Three-Level SPWM
3.4. Parallel Control of PCS Based on CAN Bus
4. Experimental Result
4.1. Output Phase Voltage Amplitude at 80 V
4.2. Output Phase Voltage Amplitude at 160 V
5. Conclusions
6. Patents
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, G.; Zhang, Q.; Shi, C.G.; Zhang, C.X.; Fu, M.Y.; Guo, X.W. Design and Application of Low Voltage Parallel Emergency Energy Storage Third Power Supply System for Coal Mines. Henan Sci. Technol. 2023, 42, 74–81. [Google Scholar]
- Hussain, A.; Li, D.; Luo, Y.; Zhang, H.Z.; Zhang, H.M.; Li, X.F. Porous membrane with improved dendrite resistance for high-performance lithium metal-based battery. J. Membr. Sci. 2020, 605, 118108. [Google Scholar] [CrossRef]
- Deng, Y.G.; Hussain, A.; Raza, W.; Ao, L.H.; Zong, K.; Zhao, J.; Liu, W.; Ye, P.F.; Ramiere, A.; Cai, X.K.; et al. Morphological modulation of the PBI membrane and performance optimization for Li-metal battery. Chem. Eng. J. 2023, 474, 145800. [Google Scholar] [CrossRef]
- Díaz-González, F.; Heredero-Peris, D.; Pagès-Giménez, M.; Prieto-Araujo, E.; Sumper, A. A Comparison of Power Conversion Systems for Modular Battery-Based Energy Storage Systems. IEEE Access 2020, 8, 29557–29574. [Google Scholar] [CrossRef]
- Zhu, L.F.; Wu, B.F.; Song, N.L.; Liu, Z.Z.; Yang, C.G.; Liu, R. Modelling and Additional Control for Parallel Operation of Power Converters in ESS under Master-slave Scheme. Proc. CSU-EPSA 2022, 34, 74–81. [Google Scholar]
- Kim, K.T.; Kwon, J.M.; Kwon, B.H. Parallel operation of photovoltaic power conditioning system modules for large-scale photovoltaic power generation. IET Power Electron. 2014, 7, 406–417. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, L.; Zhang, J.X.; Shi, S.S.; Ma, J.; Yu, H.R. Research on Energy Storage System Based on Master-slave Control Paralleled Three-level Converter. Electr. Drive 2014, 44, 27–31. [Google Scholar]
- Aquib, M.; Vijay, A.S.; Doolla, S.; Chandorkar, M.C. On circulating current mitigation for modular UPS/Inverters. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 1179–1190. [Google Scholar] [CrossRef]
- Dalboni, M.; Soldati, A. Distributed Controller for the Parallel Operation of Power Converters with Small Output Filters. IEEE Open J. Power Electron. 2024, 5, 1297–1308. [Google Scholar] [CrossRef]
- Zhang, J.W.; Huang, X.L.; Zhou, J.Q.; Fan, X.M.; Shi, G.; Zang, J.J.; Yang, X.W.; Cai, X. A Capacity-Expandable Cascaded Multilevel Energy Storage System Based on Laminated Power Modules. IEEE Trans. Power Electron. 2025, 40, 5265–5278. [Google Scholar] [CrossRef]
- Li, J.L.; Ding, Z.Y.; Liu, H.T.; Yang, H. Research on Grid-Forming Energy Storage Converters and Control Strategies. Power Gener. Technol. 2022, 43, 679–686. [Google Scholar]
- Luo, N.H.; Gu, S.; Yao, X.; Huang, C.; Yan, P.; Zhao, C. Parallel Circulation Current Suppression of Three–level Inverter Based on FPGA. Ind. Control Comput. 2019, 32, 139–140. [Google Scholar]
- Xu, T.; Gao, F.; Liu, H.T.; Wang, X.F.; Blaabjerg, F. A Carrier Synchronization Method for Global Synchronous Pulsewidth Modulation Application Using Phase-Locked Loop. IEEE Trans. Power Electron. 2019, 34, 10720–10732. [Google Scholar] [CrossRef]
- Yang, H.K. Research on Parallel Operation Control Technology of the Battery Energy Storage Converter in New Energy Stations. Electr. Mach. Technol. 2024, 4, 13–18. [Google Scholar]
- Roncero-Clemente, C.; Gonzalez-Romera, E.; Barrero-Gonzalez, F.; Milanes-Montero, M.I.; Romero-Cadaval, E. Power-Flow-Based Secondary Control for Autonomous Droop-Controlled AC Nanogrids with Peer-to-Peer Energy Trading. IEEE Access 2021, 9, 22339–22350. [Google Scholar] [CrossRef]
- Ding, M.; Tao, Z.L.; Hu, B.; Tan, S.J.; Yokoyama, R. Parallel Operation Strategy of Inverters Based on an Improved Adaptive Droop Control and Equivalent Input Disturbance Approach. Electronics 2024, 13, 486. [Google Scholar] [CrossRef]
- Zheng, R.N.; Han, H.; Li, G.J.; Ge, X.H. A local master-slave coordinated control strategy for series-parallel inverter microgrids. Power Syst. Prot. Control 2020, 48, 47–56. [Google Scholar]
- Liu, P.; Bi, Y.; Liu, C. Data-Based Intelligent Frequency Control of VSG via Adaptive Virtual Inertia Emulation. IEEE Syst. J. 2022, 16, 3917–3926. [Google Scholar] [CrossRef]
- Zhang, C.X.; Li, C.B.; Feng, W.; Sun, K.; Xia, Y.W.; Liu, Q. A Coordinated Transient Power Fluctuation Suppression Strategy for Power Conversion System in Islanded PV/Storage Microgrid. Proc. CSEE 2018, 38, 2302–2314. [Google Scholar]
- Sun, P.; Yao, J.; Zhao, Y.; Fang, X.; Cao, J.Y. Stability Assessment and Damping Optimization Control of Multiple Grid-connected Virtual Synchronous Generators. IEEE Trans. Energy Convers. 2021, 36, 3555–3567. [Google Scholar] [CrossRef]
- Guan, Y.; Guerrero, J.M.; Zhao, X.; Vasquez, J.C.; Guo, X. A new way of controlling parallel-connected inverters by using synchronous-reference-frame virtual impedance loop–Part I: Control principle. IEEE Trans. Power Electron 2016, 31, 4576–4593. [Google Scholar] [CrossRef]
- Espina, E.; Llanos, J.; Burgos-Mellado, C.; Cárdenas-Dobson, R.; Martínez-Gómez, M.; Sáez, D. Distributed Control Strategies for Microgrids: An Overview. IEEE Access 2020, 8, 193412–193448. [Google Scholar] [CrossRef]
- Yuan, L.; Qing, Y.; Jiang, Y.H.; Xu, A.F. A New Neutral-point Voltage Balance Control Based on Virtual Space Vector Modulation for Three-Level NPC Converter. J. Electr. Eng. Technol. 2023, 18, 971–980. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, Z.B.; Yin, Y.F.; Vazquez, S.; Zhao, Y.X.; Kennel, R. An Efficient Robust Power-Voltage Control for Three-Level NPC Converters in Micro grids. IEEE Trans. Ind. Inform. 2024, 20, 5849–5863. [Google Scholar] [CrossRef]
- Zhou, J.H.; Sun, Y.F.; Chen, S.S.; Lan, T.F. A Fast Repetitive Control Strategy for a Power Conversion System. Electronics 2024, 13, 1186. [Google Scholar] [CrossRef]
- Wu, Y.L.; Ge, L.; Yuan, X.D.; Fu, X.Y.; Wang, M.S. Adaptive Power Control Based on Double-layer Q-learning Algorithm for Multi-parallel Power Conversion Systems in Energy Storage Station. J. Mod. Power Syst. Clean Energy 2022, 10, 1714–1724. [Google Scholar] [CrossRef]
- Li, J.L.; Xu, S.H.; Hui, D. A review of stability analysis and control strategy of multi-parallel PCS for analysis and control strategy of multi-parallel PCS for hundred MW level energy storage power station. Proc. CSEE 2016, 36, 4034–4047. [Google Scholar]
- Park, T.W.; Kim, R.Y.; Lee, J.H. An Instantaneous Load-Sharing Parallel Control Method Using Improved PWM-Capture With DMA in a Power Conversion System. IEEE Access 2024, 12, 29660–29672. [Google Scholar] [CrossRef]
- Wang, L.Q.; Zhang, J.L.; Guan, C.G.; Zhang, X.F. Research on Single-Phase Current Source Inverter Based on Nonlinear Carrier Modulation. Acta Energiae Solaris Sin. 2021, 42, 435–442. [Google Scholar]
















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, M.; Zhou, G.; Guo, L.; Song, N.; Wang, Y.; Lv, H.; Chu, S. Energy Storage Converter Off-Grid Parallel Cooperative Control Based on CAN Bus. Electronics 2025, 14, 2010. https://doi.org/10.3390/electronics14102010
Zhu M, Zhou G, Guo L, Song N, Wang Y, Lv H, Chu S. Energy Storage Converter Off-Grid Parallel Cooperative Control Based on CAN Bus. Electronics. 2025; 14(10):2010. https://doi.org/10.3390/electronics14102010
Chicago/Turabian StyleZhu, Mengmei, Guangxu Zhou, Lei Guo, Ningran Song, Yipei Wang, Hongzhang Lv, and Sheng Chu. 2025. "Energy Storage Converter Off-Grid Parallel Cooperative Control Based on CAN Bus" Electronics 14, no. 10: 2010. https://doi.org/10.3390/electronics14102010
APA StyleZhu, M., Zhou, G., Guo, L., Song, N., Wang, Y., Lv, H., & Chu, S. (2025). Energy Storage Converter Off-Grid Parallel Cooperative Control Based on CAN Bus. Electronics, 14(10), 2010. https://doi.org/10.3390/electronics14102010