
Overvoltage Suppression Strategy of LCC-HVDC Delivery System Based on Hydropower Phase Control Participation

 ,
, 
Abstract
1. Introduction
- The proposed strategy introduces the measured trigger angle in the rectifier side control system into the hydroelectric excitation control system, which can respond quickly to the overvoltage at the sending end after the commutation failure and absorb the surplus reactive power.
- The proposed strategy fully exploits the reactive power absorption capacity and emergency voltage regulation capacity of the hydropower unit. Overvoltage suppression can be achieved without the need for additional equipment, avoiding additional investment.
2. Principle of Overvoltage at the Sending End
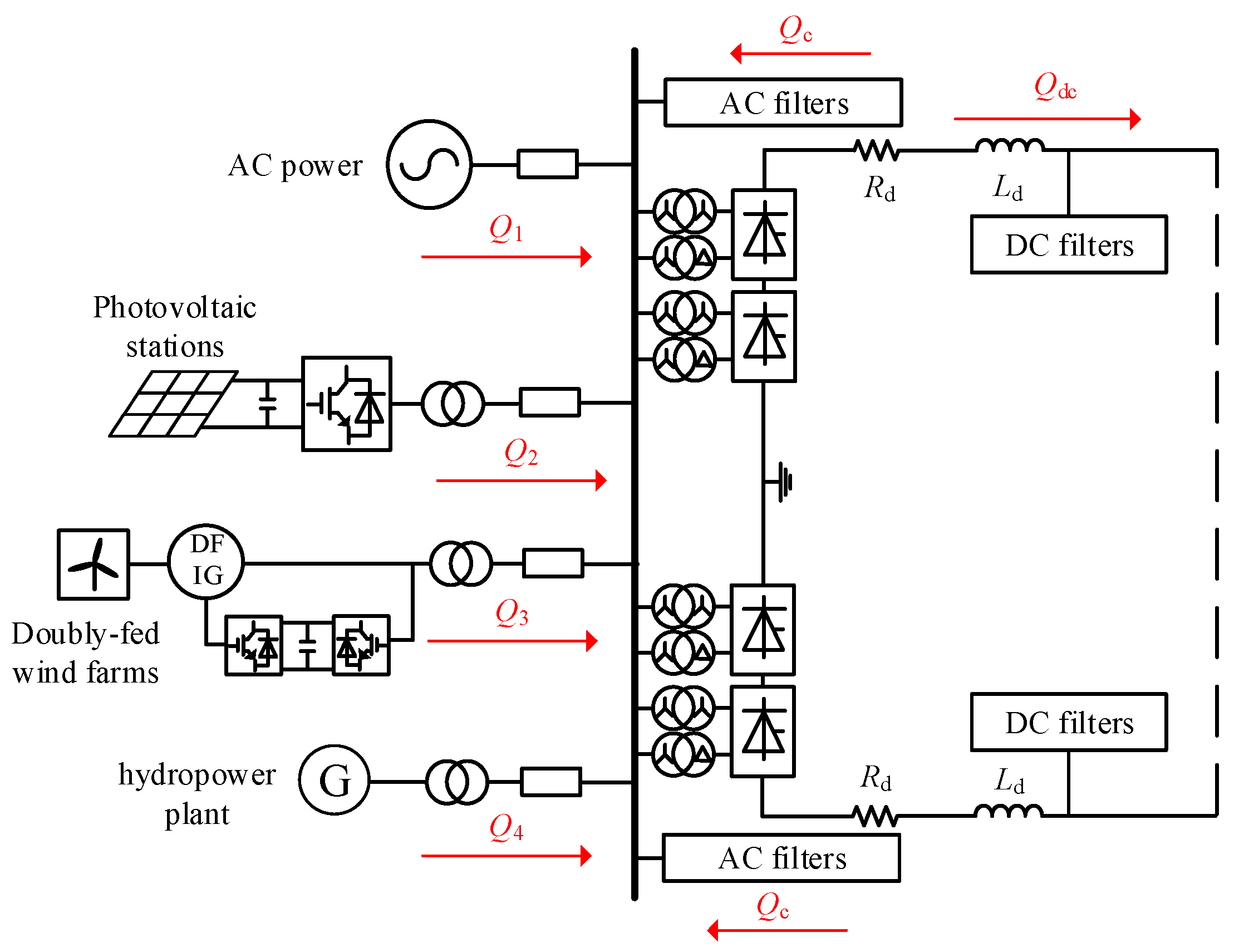
2.1. Feeder Systems for Clean Energy Sent via Direct Current
2.2. Principle of Overvoltage Triggered by Commutation Failure at the Sending End of the System
2.3. Calculation of Transient Overvoltage at the Sending End under DC Blocking after Commutation Failure
3. Coordinated Control Strategy for Overvoltage Suppression at the Sending End of Hydropower and DC System
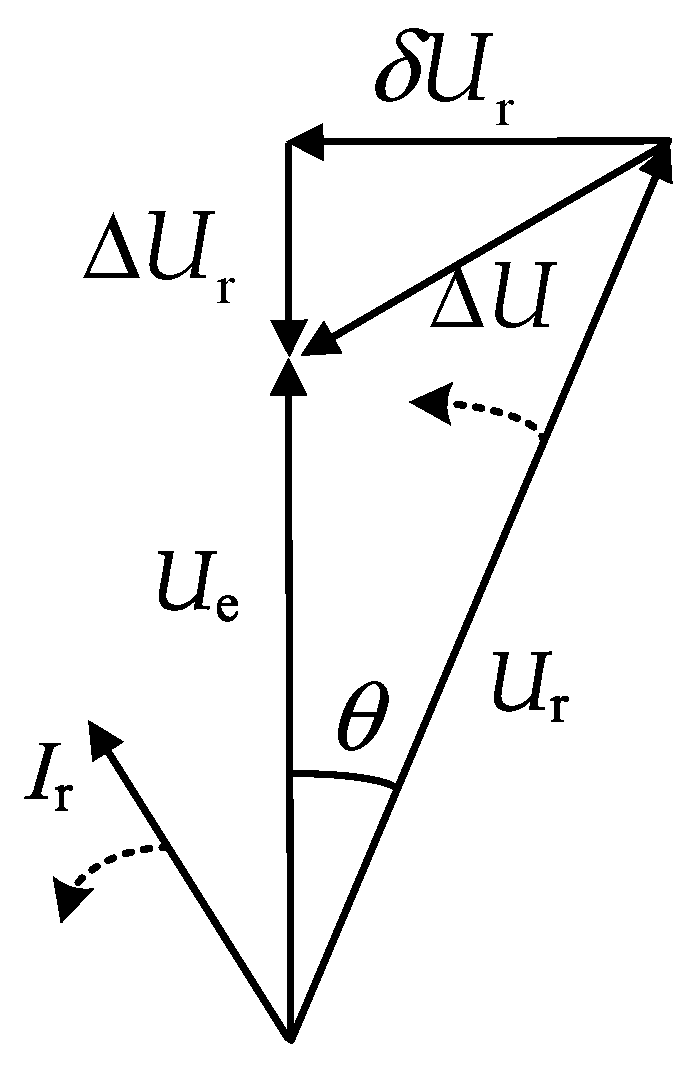
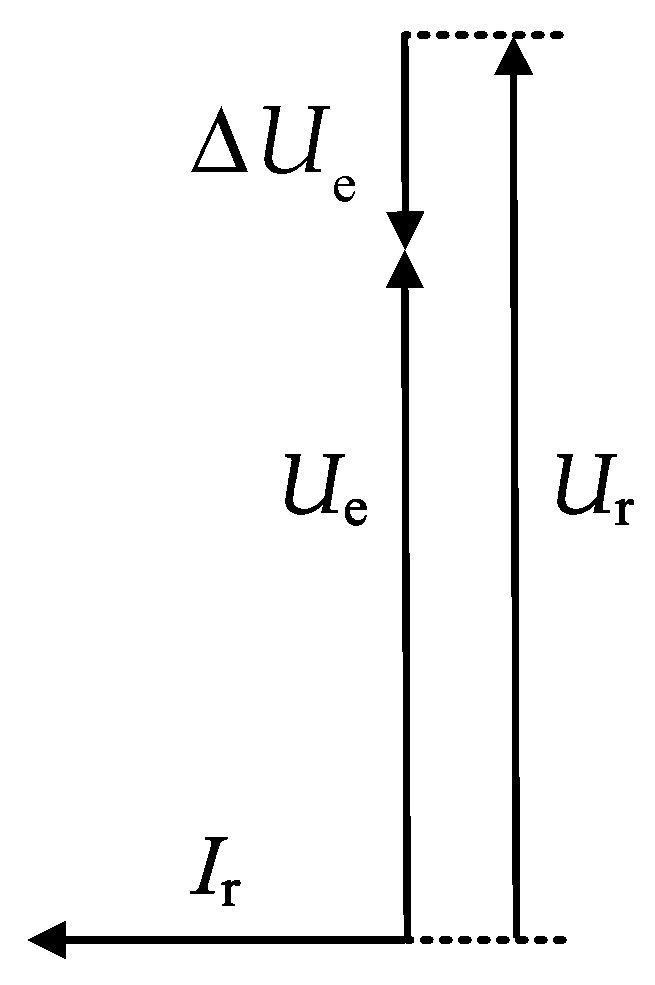
3.1. Transient Output Characteristics of Hydroelectric Units
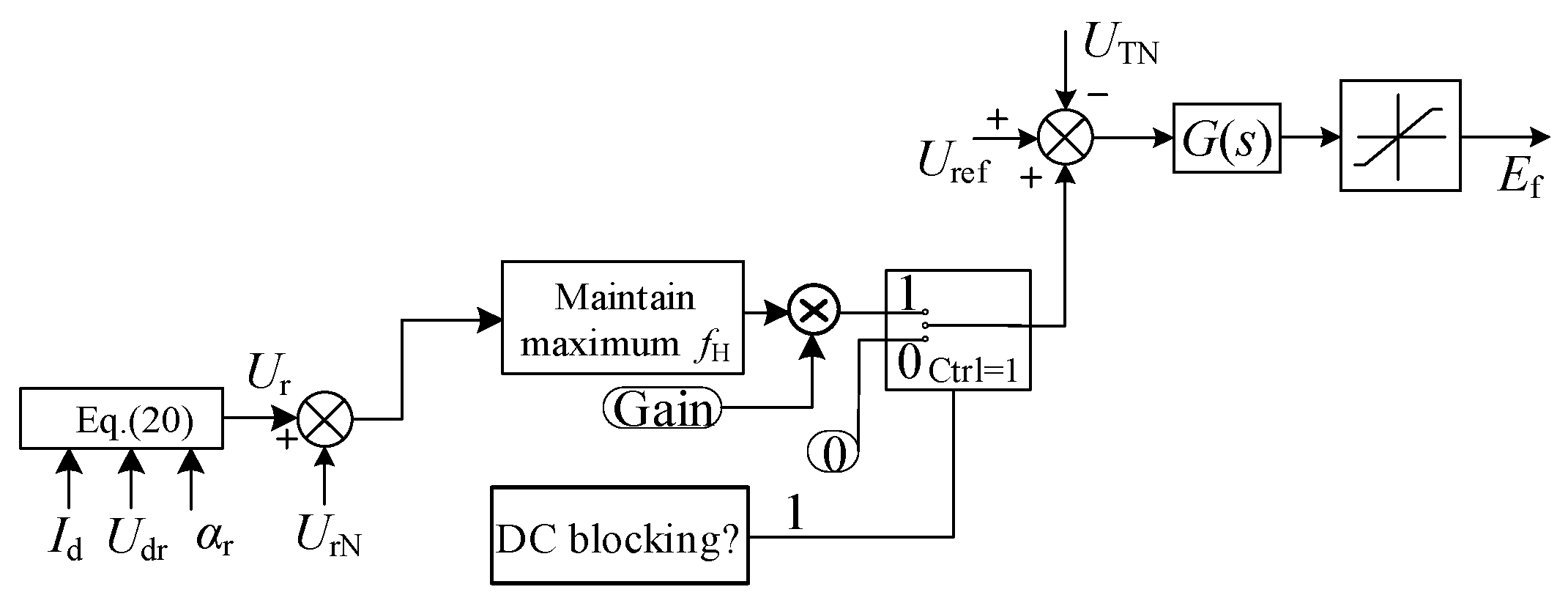
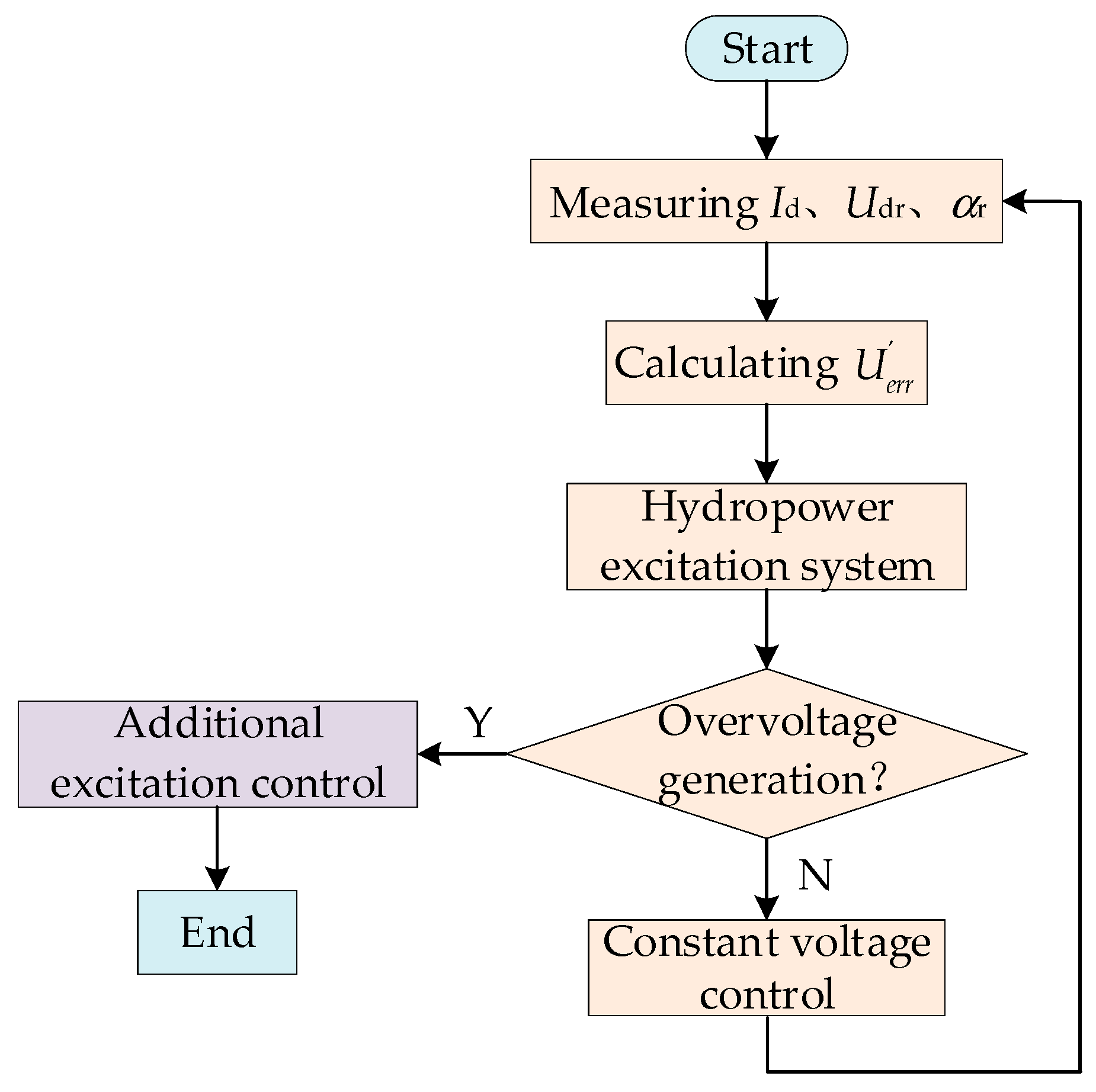
3.2. Principle of Coordinated Control Strategy
4. Simulation and Verification
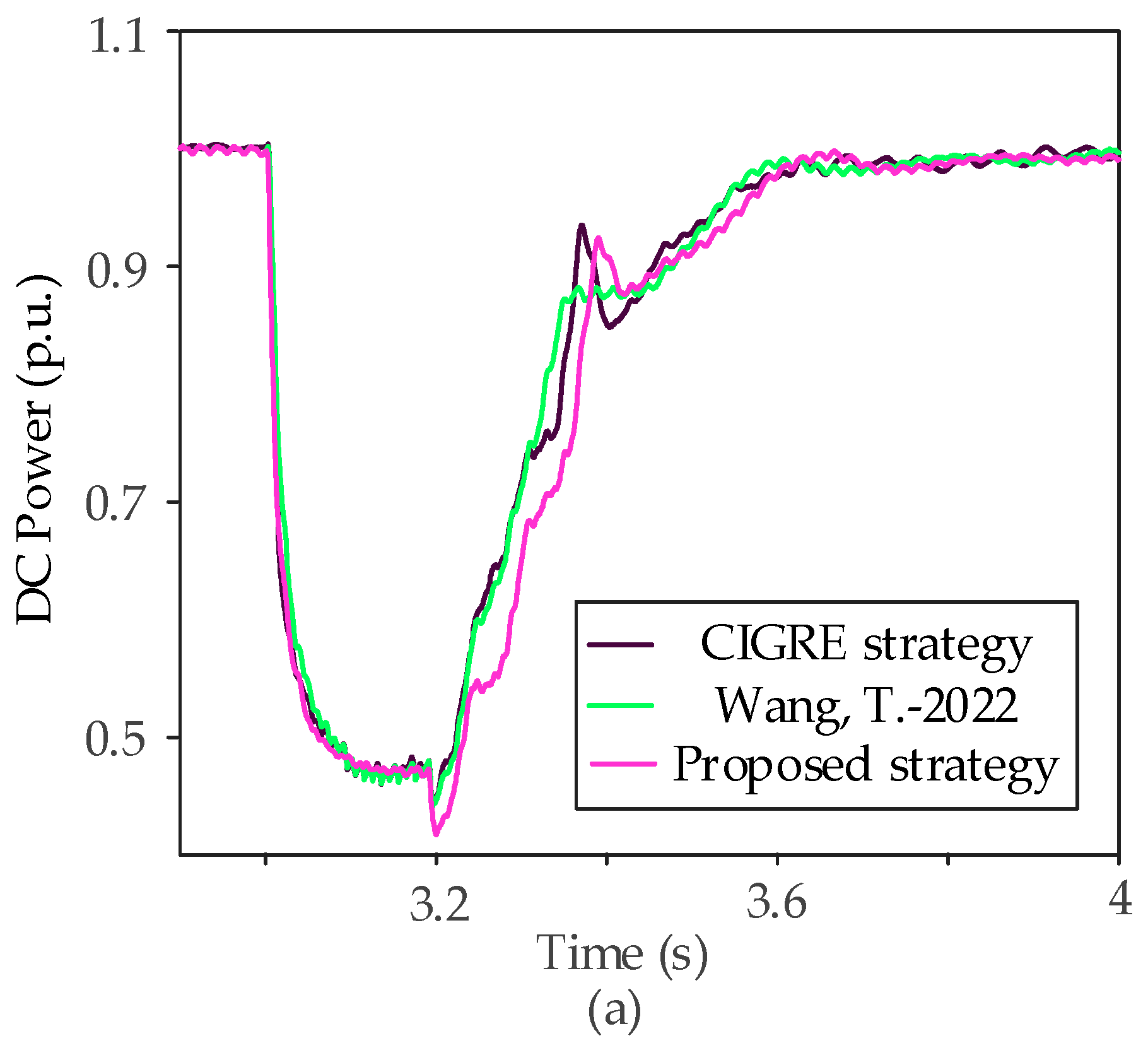
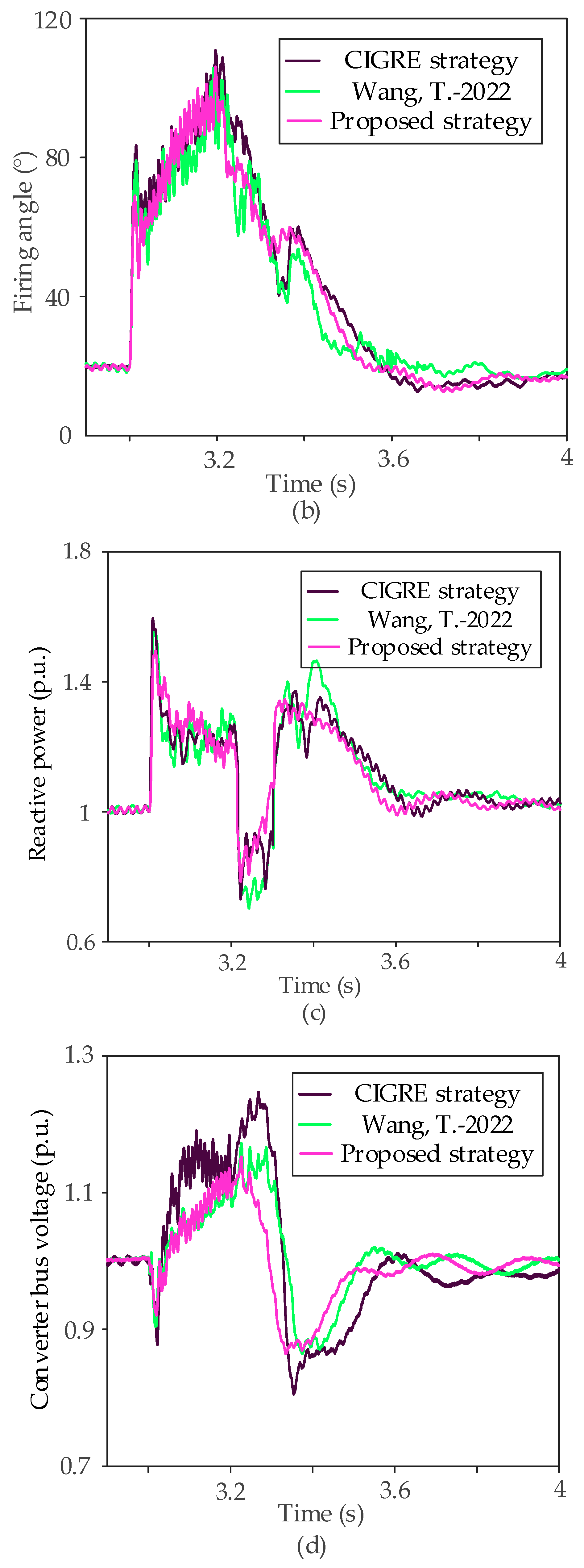
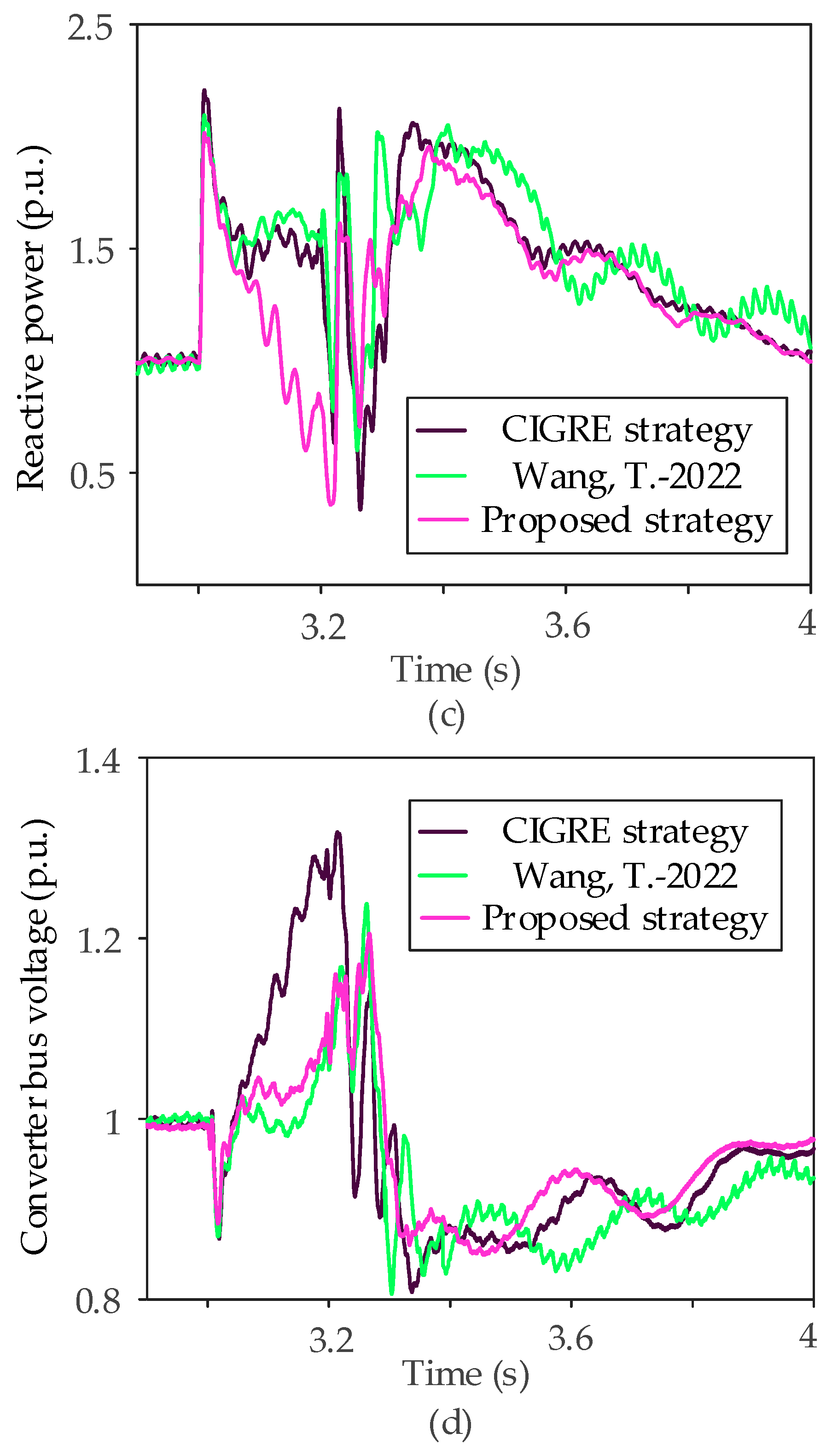
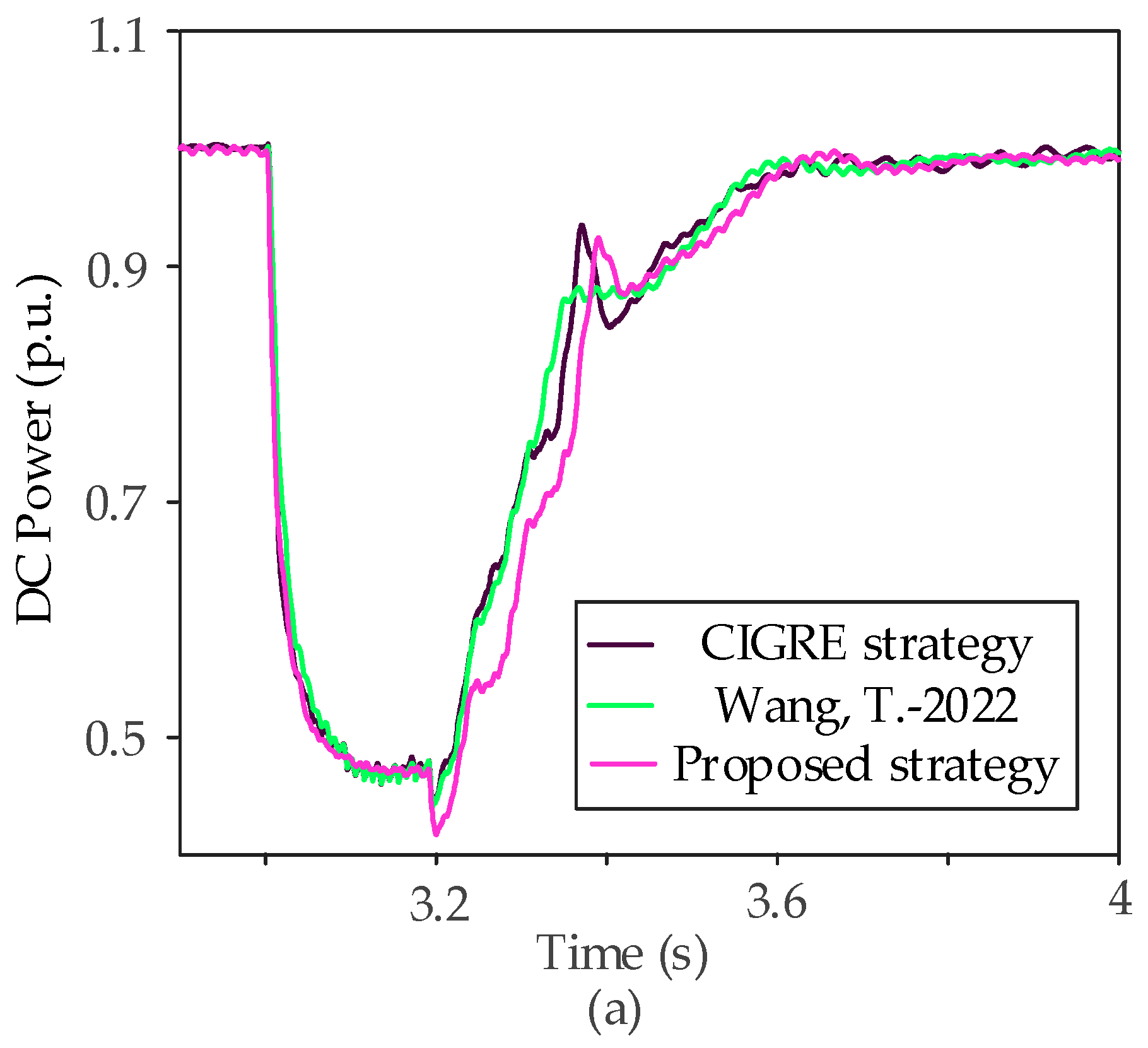
4.1. Comparison of System Operating Characteristics
- (1)
- CIGRE strategy: the CIGRE standard control strategy.
- (2)
- (3)
- Proposed strategy: the coordinated control strategy proposed in this paper.
4.2. Comparison of Transient Overvoltage Suppression Rate Indexes
5. Conclusions
- (1)
- Hydropower units can reduce reactive power output by lowering the excitation voltage, or even turn to absorb reactive power, thus reducing the system overvoltage. However, this ability is limited by its own constant voltage control strategy, which reduces the ability to suppress overvoltage to a certain extent.
- (2)
- Adopting the coordinated control strategy of hydropower and DC system proposed in this paper can strengthen the ability of the hydropower unit to absorb excess reactive power and effectively reduce the overvoltage amplitude of the sending end converter bus.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Y. Technology and Practice of the Operation Control of Large Power Grid Connected with Weak AC Area. Power Syst. Technol. 2016, 40, 3756–3760. [Google Scholar]
- Mirsaeidi, S.; Dong, X.; Tzelepis, D.; Mat Said, D.; Dysko, A.; Booth, C. A Predictive Control Strategy for Mitigation of Commutation Failure in LCC-based HVDC Systems. IEEE Trans. Power Electron. 2019, 34, 160–172. [Google Scholar] [CrossRef]
- Yao, L.Z.; Wu, J.; Wang, Z.B. Pattern Analysis of Future HVDC Grid Development. Proc. CSEE 2014, 34, 6007–6020. [Google Scholar]
- Dong, X.; Guan, E.; Jing, L.; Wang, H.; Mirsaeidi, S. Simulation and Analysis of Cascading Faults in Hybrid AC/DC Power Grids. Int. J. Elect. Power Energy Syst. 2020, 115, 105492. [Google Scholar] [CrossRef]
- Gao, B.F.; Yang, J.; Song, S.L. Coordinated Control Strategy of Hydropower Units for Restraining Overvoltage of Renewable Energy Generation System Integrated With HVDC. Proc. CSEE 2021, 41, 6212–6224. [Google Scholar]
- Chen, G.P.; Li, M.J.; Xu, T. Practice and Challenge of Renewable Energy Development Based on Interconnected Power Grids. Power Syst. Technol. 2017, 41, 3095–3103. [Google Scholar]
- Wang, S.Y.; Xu, S.Y.; Sun, H.D. Overvoltage of the Power System Integrated with High Proportion of Power Electronics Equipment (III)—Mechanistic Analysis of Temporary Power Frequency Overvoltage Caused by DC Fault. Available online: https://doi.org/10.13334/j.0258-8013.pcsee.222403 (accessed on 16 February 2024).
- Niu, T.; Guo, Q.L.; Sun, H.B. Autonomous Voltage Security Regions to Prevent Cascading Trip Faults in Wind Turbine Generators. IEEE Trans. Sustain. Energy 2016, 7, 1306–1316. [Google Scholar] [CrossRef]
- Yin, C.Y.; Li, F.T. Analytical Expression on Transient Overvoltage Peak Value of Converter Bus Caused by DC Faults. IEEE Trans. Power Syst. 2021, 36, 2741–2744. [Google Scholar] [CrossRef]
- Wang, T.; Pei, L.; Wang, J.M. Overvoltage Suppression under Commutation Failure Based on Improved Voltage-Dependent Current Order Limiter Control Strategy. IEEE Trans. Ind. Appl. 2022, 58, 4914–4922. [Google Scholar] [CrossRef]
- Yuan, Y.; Wei, Z.; Wang, H.; Lei, X.; Sun, G. A DC Current Predictive Control Based Method to Decrease Probability of Commutation Failure. Power Syst. Technol. 2014, 38, 565–570. [Google Scholar]
- Mirsaeidi, S.; Dong, X. An Enhanced Strategy to Inhibit Commutation Failure in Line-Commutated Converters. IEEE Trans. Ind. Electron. 2020, 67, 340–349. [Google Scholar] [CrossRef]
- Liu, X.Y.; Li, X.W.; Jiao, D.H. Theoretical Study on Control Strategy of Grid-Connected High Voltage Ride through in Doubly-Fed Wind Farm. IEEE Access 2019, 7, 107453–107464. [Google Scholar] [CrossRef]
- Zhou, C.P.; Wang, Z.; Ju, P. High-Voltage Ride Through Strategy for DFIG Considering Converter Blocking of HVDC System. J. Mod. Power Syst. Clean Energy 2020, 8, 491–498. [Google Scholar] [CrossRef]
- Zhang, K.; Geng, G.C.; Jiang, Q.Y. Online Tracking of Reactive Power Reserve for Wind Farms. IEEE Trans. Sustain. Energy 2020, 11, 1100–1102. [Google Scholar] [CrossRef]
- Liu, J.S.; Li, F.T.; Yin, C.Y. Mechanism of and Suppression Strategy for Transient Voltage Fluctuation in the Commutator Bus of a Hybrid Cascaded DC System Caused by Commutation Failure. Power Syst. Prot. Control 2023, 51, 36–46. [Google Scholar]
- Tu, J.; Zhang, S.; Ma, S.; Liu, M.; Yi, J.; Luo, X.; He, Q. Mechanism Analysis and Control Measures of Wind Turbine Generators Tripping Caused by HVDC Contingencies. In Proceedings of the 12th IET International Conference on AC and DC Power Transmission (ACDC 2016), Beijing, China, 28–29 May 2016. [Google Scholar]
- Aamir, A.; Qiao, L.; Guo, C.; Rehman, A.U.; Yang, Z. Impact of Synchronous Condenser on the Dynamic Behavior of LCC-Based UHVDC System Hierarchically Connected to AC System. CSEE J. Power Energy Syst. 2019, 5, 190–198. [Google Scholar] [CrossRef]
- Yin, C.; Li, F. Reactive Power Control Strategy for Inhibiting Transient Overvoltage Caused by Commutation Failure. IEEE Trans. Power Syst. 2021, 36, 4764–4777. [Google Scholar] [CrossRef]
- Yin, C.; Li, F.; Wang, D.; Liu, Y.; Fu, L. Research on Stability Control Scheme for AC/DC Hybrid Transmission System with Wind Power High Permeability under DC Blocking. Power Syst. Prot. Control 2019, 47, 95–102. [Google Scholar]
- He, J.; Zhuang, W.; Xu, T.; Huo, C.; Jiang, W. Study on Cascading Tripping Risk of Wind Turbines Caused by Transient Overvoltage and Its Countermeasures. Power Syst. Technol. 2016, 40, 1839–1844. [Google Scholar]
- Ding, M.; Zhang, Y.; Han, P.P. Research of Urgent Control Strategy under HVDC Block for Wind-Thermal-Bundled Sending End System. Acta Energiae Solaris Sin. 2019, 40, 1928–1937. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value/p.u. | Parameter | Numerical Value/p.u. |
|---|---|---|---|
| UrN | 1 | 0.3121 | |
| kr | 1.26 | 0.6452 | |
| Rr | 1 | kA | 40 |
| N | 2 | KF | 0.01 |
| Fault Type | Ur1max/p.u. | Ur2max/p.u. | TOSR | Ur3max/p.u. | TOSR |
|---|---|---|---|---|---|
| Commutation failure | 1.176 | 1.134 | 23.86% | 1.113 | 35.80% |
| DC unipolar blocking fault | 1.243 | 1.173 | 28.81% | 1.151 | 37.86% |
| DC bipolar blocking fault | 1.327 | 1.231 | 29.36% | 1.201 | 38.53% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Cao, B.; Shi, H.; Shi, P.; Wang, Y.; Liao, J.; Li, Y.; Zeng, W. Overvoltage Suppression Strategy of LCC-HVDC Delivery System Based on Hydropower Phase Control Participation. Electronics 2024, 13, 1223. https://doi.org/10.3390/electronics13071223
Wu X, Cao B, Shi H, Shi P, Wang Y, Liao J, Li Y, Zeng W. Overvoltage Suppression Strategy of LCC-HVDC Delivery System Based on Hydropower Phase Control Participation. Electronics. 2024; 13(7):1223. https://doi.org/10.3390/electronics13071223
Chicago/Turabian StyleWu, Xiaorong, Bin Cao, Huabo Shi, Peng Shi, Yuhong Wang, Jianquan Liao, Yuanqi Li, and Weigang Zeng. 2024. "Overvoltage Suppression Strategy of LCC-HVDC Delivery System Based on Hydropower Phase Control Participation" Electronics 13, no. 7: 1223. https://doi.org/10.3390/electronics13071223
APA StyleWu, X., Cao, B., Shi, H., Shi, P., Wang, Y., Liao, J., Li, Y., & Zeng, W. (2024). Overvoltage Suppression Strategy of LCC-HVDC Delivery System Based on Hydropower Phase Control Participation. Electronics, 13(7), 1223. https://doi.org/10.3390/electronics13071223