
Design of Multivariable PID Control Using Iterative Linear Programming and Decoupling





Abstract
1. Introduction
2. Preliminaries
3. Proposed Methodology
3.1. Linear Parameterization of ELTFs
3.2. PID Parameter Tuning via Linear Programming
3.2.1. Optimization I
- (a)
- Inequation for fulfilling the linear margin by each ELTF to ensure minimum robustness values. To improve the convergence of the iterative method, the two proposed expressions of the ELTFs are used: one that depends only on the controllers of the associated column (option a) and another that depends on all the control elements (option b);
- (b)
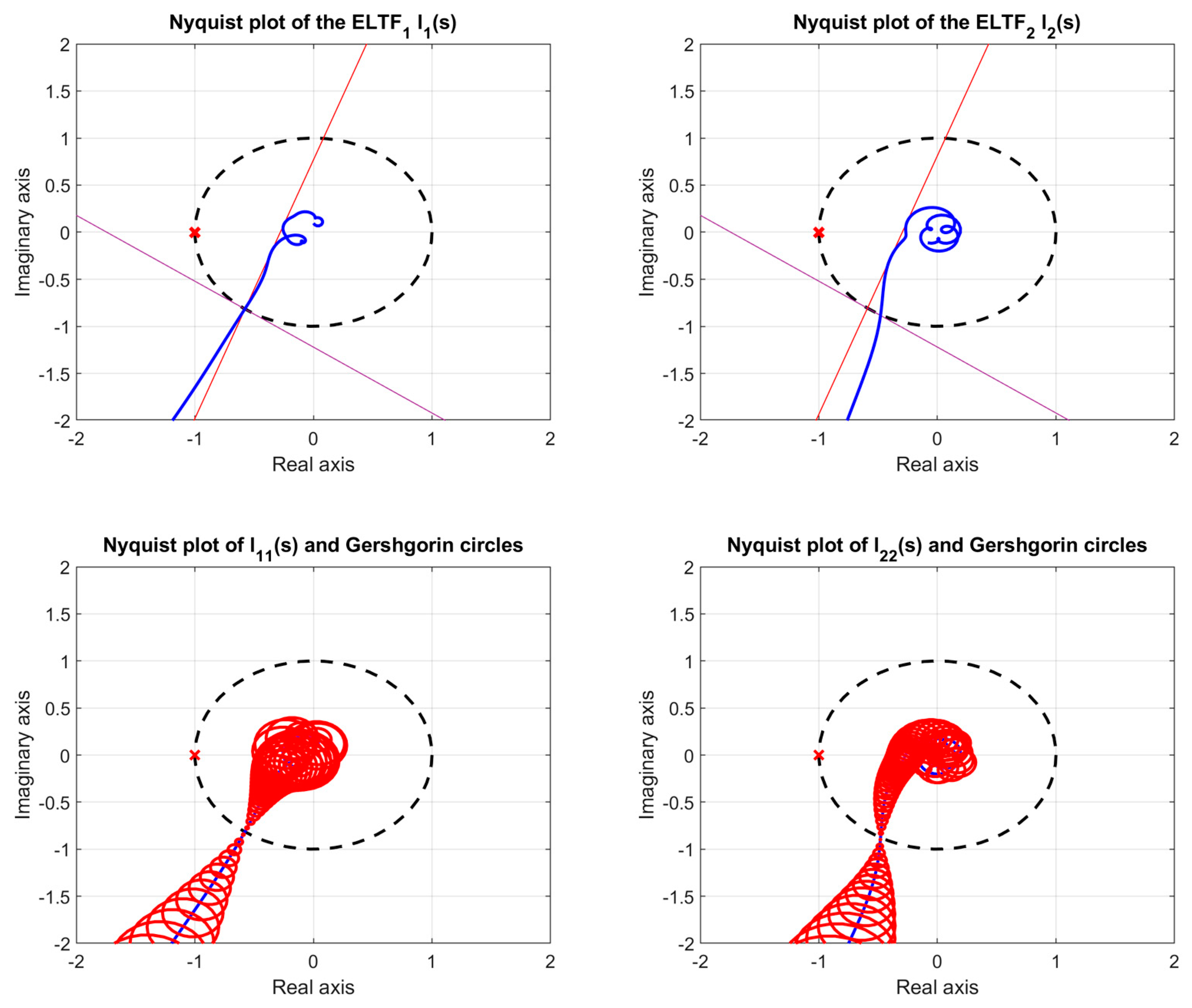
- Inequation to prevent the Nyquist polar trace of the diagonal elements of the open-loop matrix L(s) from encircling the critical point. Thus, the ELTFs are stable if the elements of G(s) are stable;
- (c)
- Equality to achieve static decoupling. As an example, the expressions for the 2 × 2 case in (18) are parameterized with respect to ρ. Here, 01×3 represents a row vector of three zero elements;
- (d)
- Equality to achieve decoupling at the selected ωx frequencies. The constraint in (19) is linearly parameterized with respect to ρ;
- (e)
- Lower (LB) and upper (UB) bounds on the design parameters. Integral gains are forced to be positive, whereas proportional and derivative gains can have any sign.
3.2.2. Optimization II
- (a)
- Inequations to meet the bandwidth specification ωx in each ELTF. To improve the convergence of the iterative method, the two proposed expressions of the ELTFs are used: one that only depends on the associated column controllers (option a) and one that depends on all the control elements (option b);
- (b)
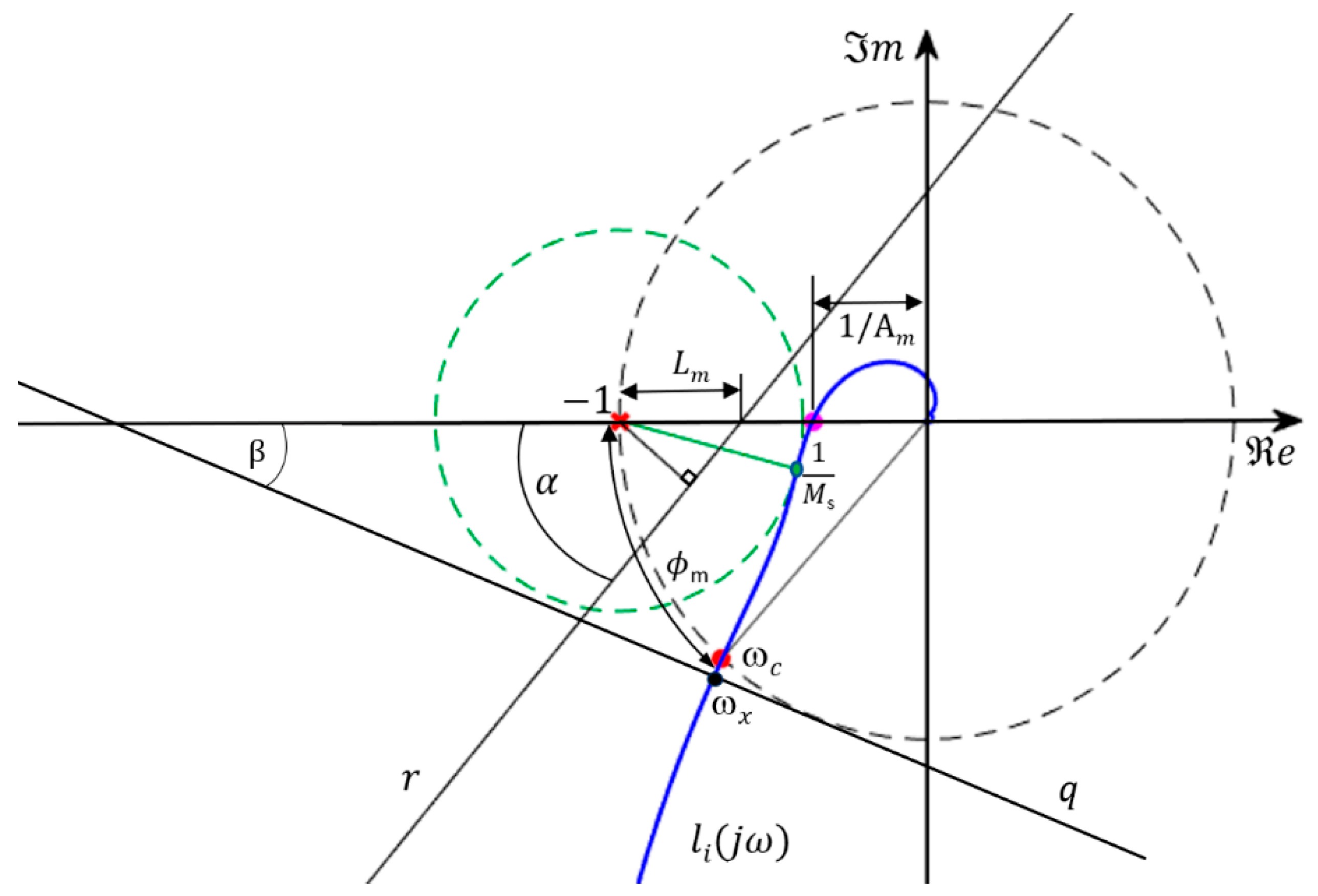
- Inequation for the fulfillment of the linear margin by each ELTF similar to optimization I but with two differences: the linear margin is now a decision variable; and, in addition, this constraint is now only required for frequencies higher than ωx. For lower frequencies, it is not required to be to the right of line r in Figure 3 since the previous constraint renders the Nyquist plot of the ELTF to be below the line q defined by β and tangent to the unit circle for frequencies below ωx. This constraint also causes the polar trace to move away from the critical point −1;
- (c)
- Inequation to prevent the polar trace of the diagonal elements of the open-loop matrix L(s) from encircling the critical point. It is similar to optimization I but is parameterized with respect to θ;
- (d)
- Equality to achieve static decoupling. This is similar to optimization I but is parameterized with respect to θ;
- (e)
- Equality to achieve decoupling at frequency ωx. This is similar to optimization I but is parameterized with respect to θ. However, it must be said that in optimization II, adding this may reduce the achievable bandwidth;
- (f)
- Lower (LB) and upper (UB) bounds on the design parameters.
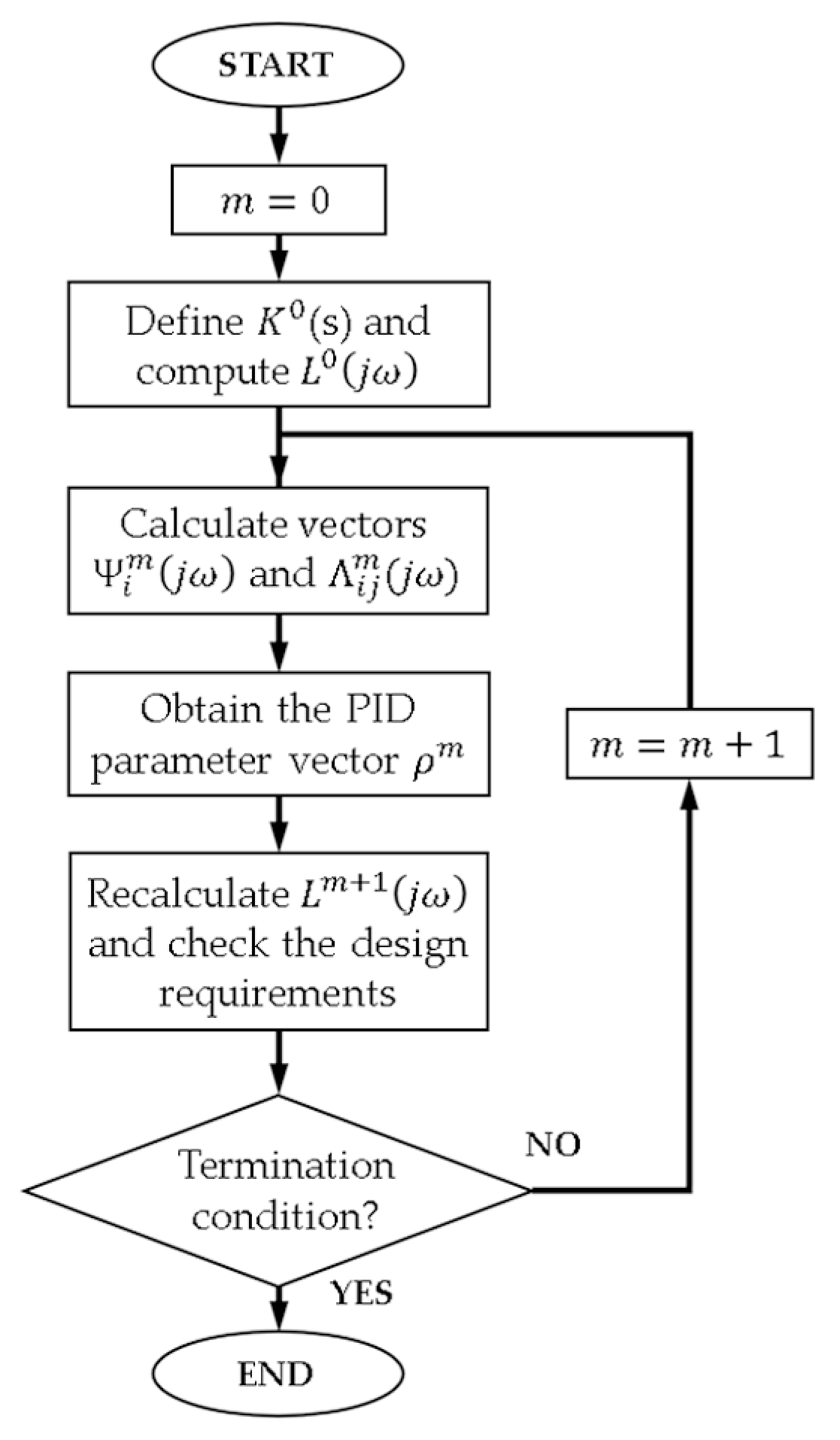
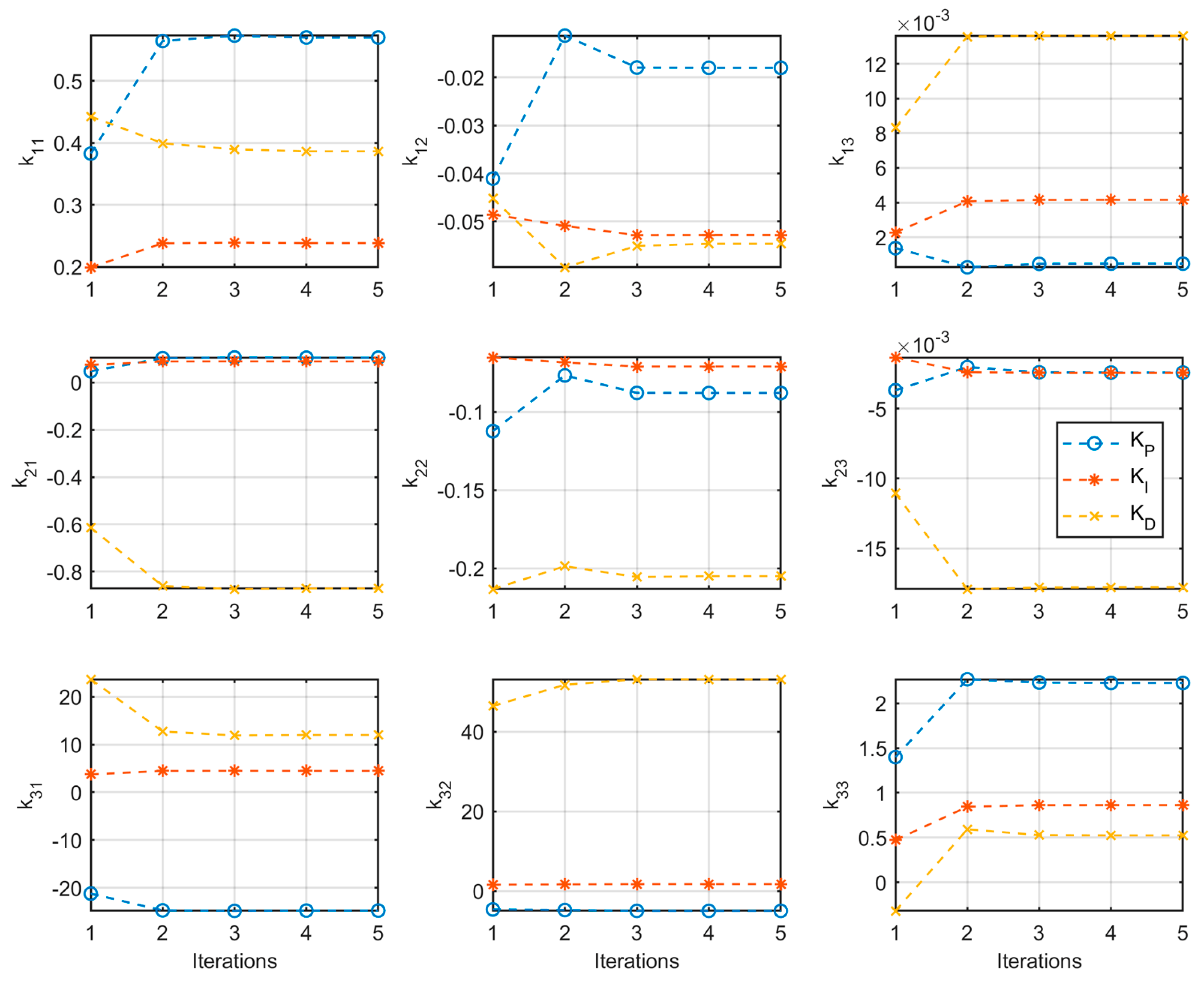
3.3. Iterative Algorithm
- Calculate, according to Section 3.1, the vectors Ψia(jωk), Ψib(jωk) for the ELTF of each loop and the vectors Λij(jωk) from the frequency response of the open-loop matrix known from the previous iteration Lm−1(jω);
- Obtain the PID parameter vector ρm using the linear programming method proposed in Section 3.2 depending on the design specifications;
- Recalculate the new open-loop matrix frequency response Lm(jω) with the new PID MIMO control matrix. With these open-loop transfer functions, we calculate the new ELTFs and check if the design requirements are met in all the loops;
- If the termination condition is fulfilled, the design is accepted and the resulting vector ρ is used to generate the multivariable PID control matrix K(s); otherwise, the iteration variable m is incremented and the process iterates again. The termination condition is satisfied if, during three consecutive iterations, the variation of the decision variables is below a user-defined tolerance. A maximum number of iterations before the process stops in the case of no convergence is also defined.
4. Illustrative Examples
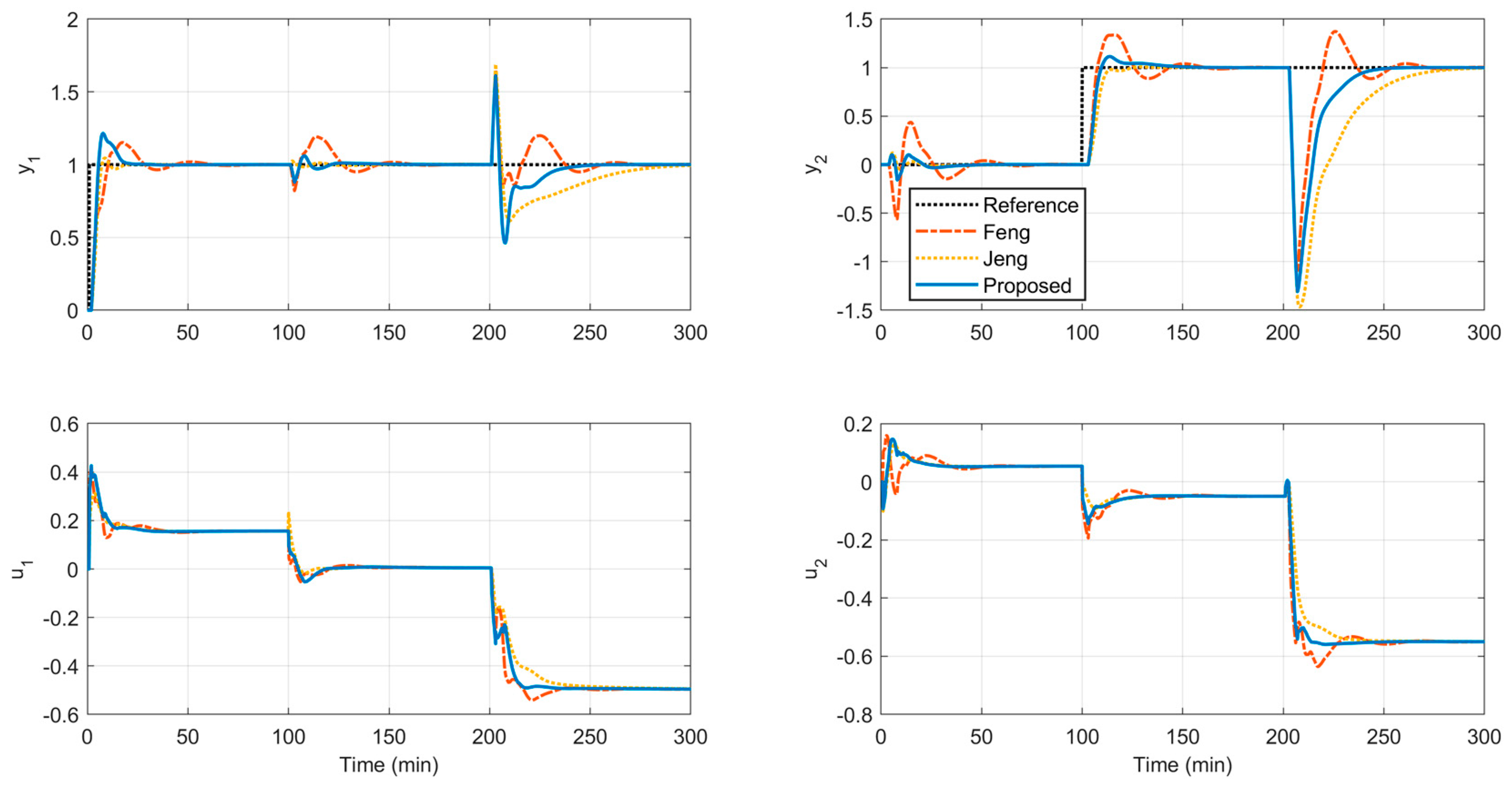
4.1. Example 1: A Wood and Berry Distillation Column
4.2. Example 2: An Ogunnaike and Ray Distillation Column
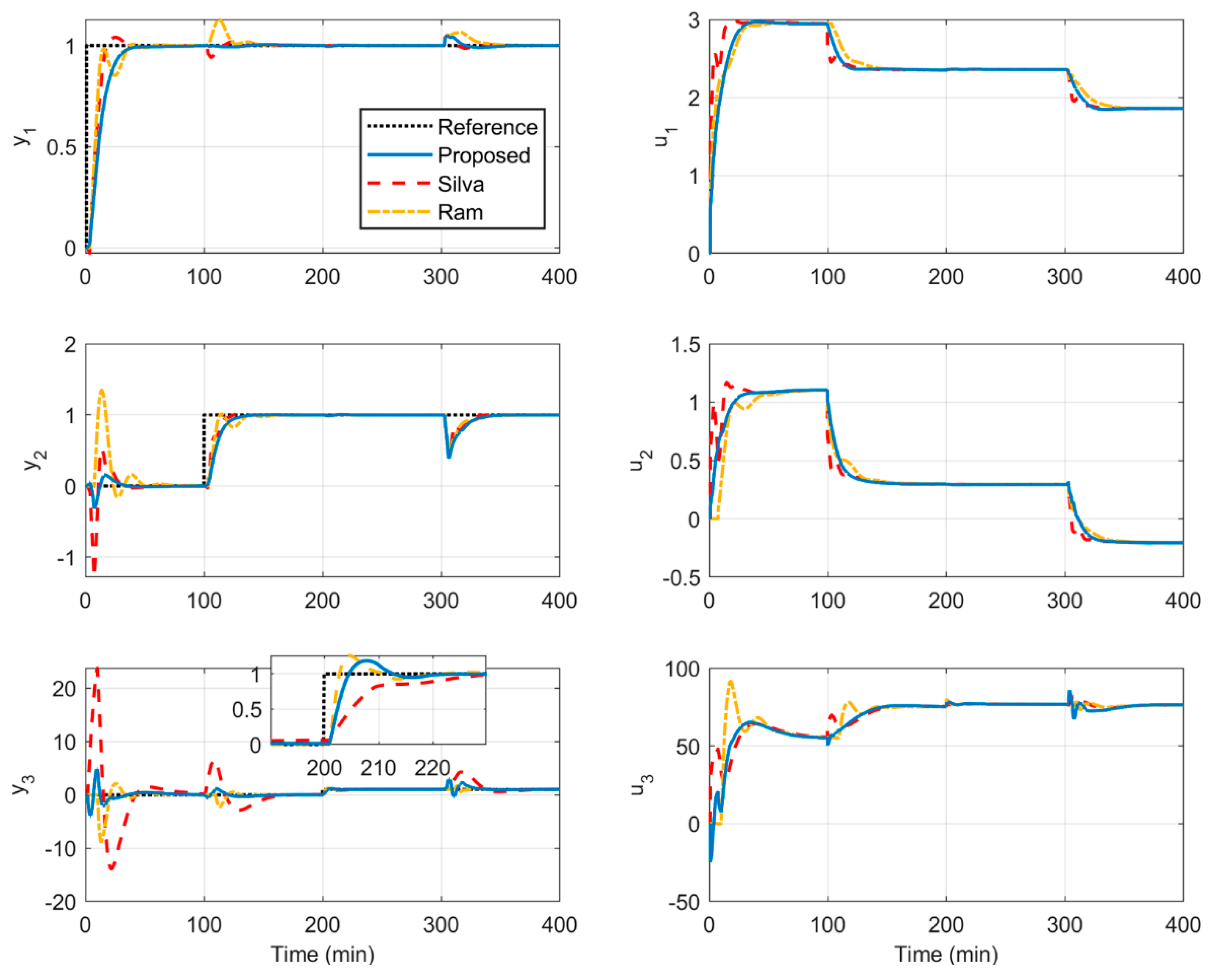
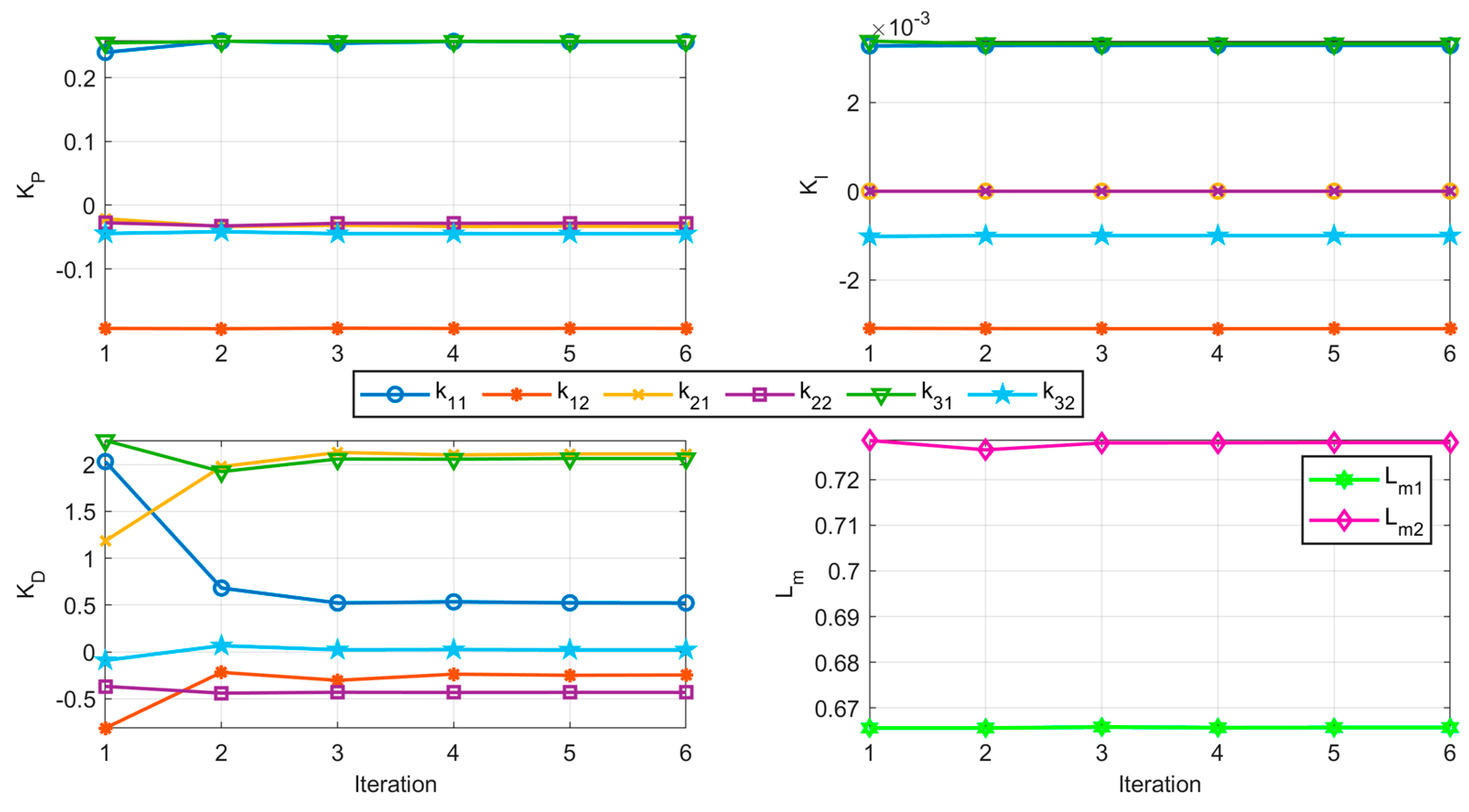
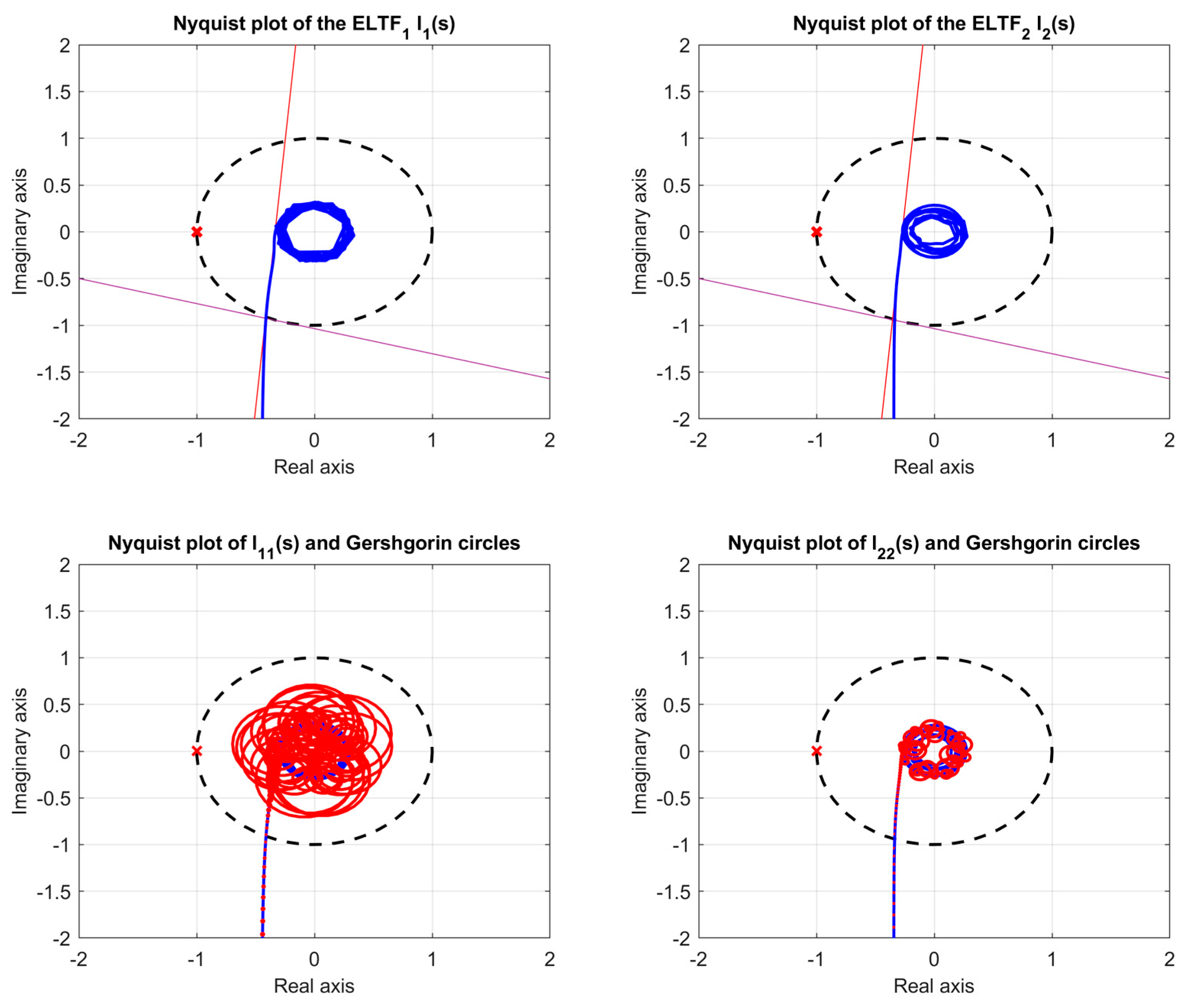
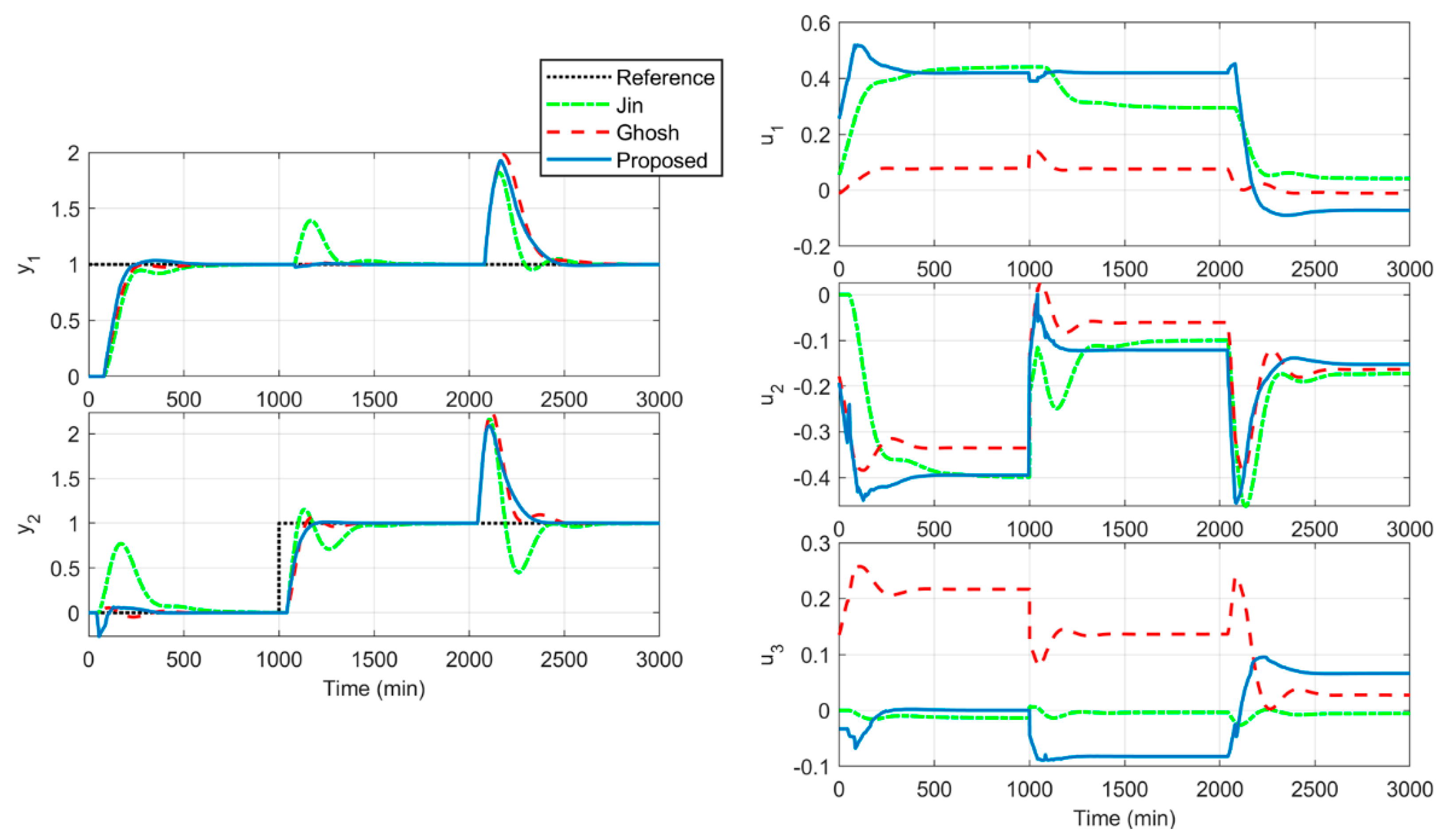
4.3. Example 3: 2 × 3 Shell Process
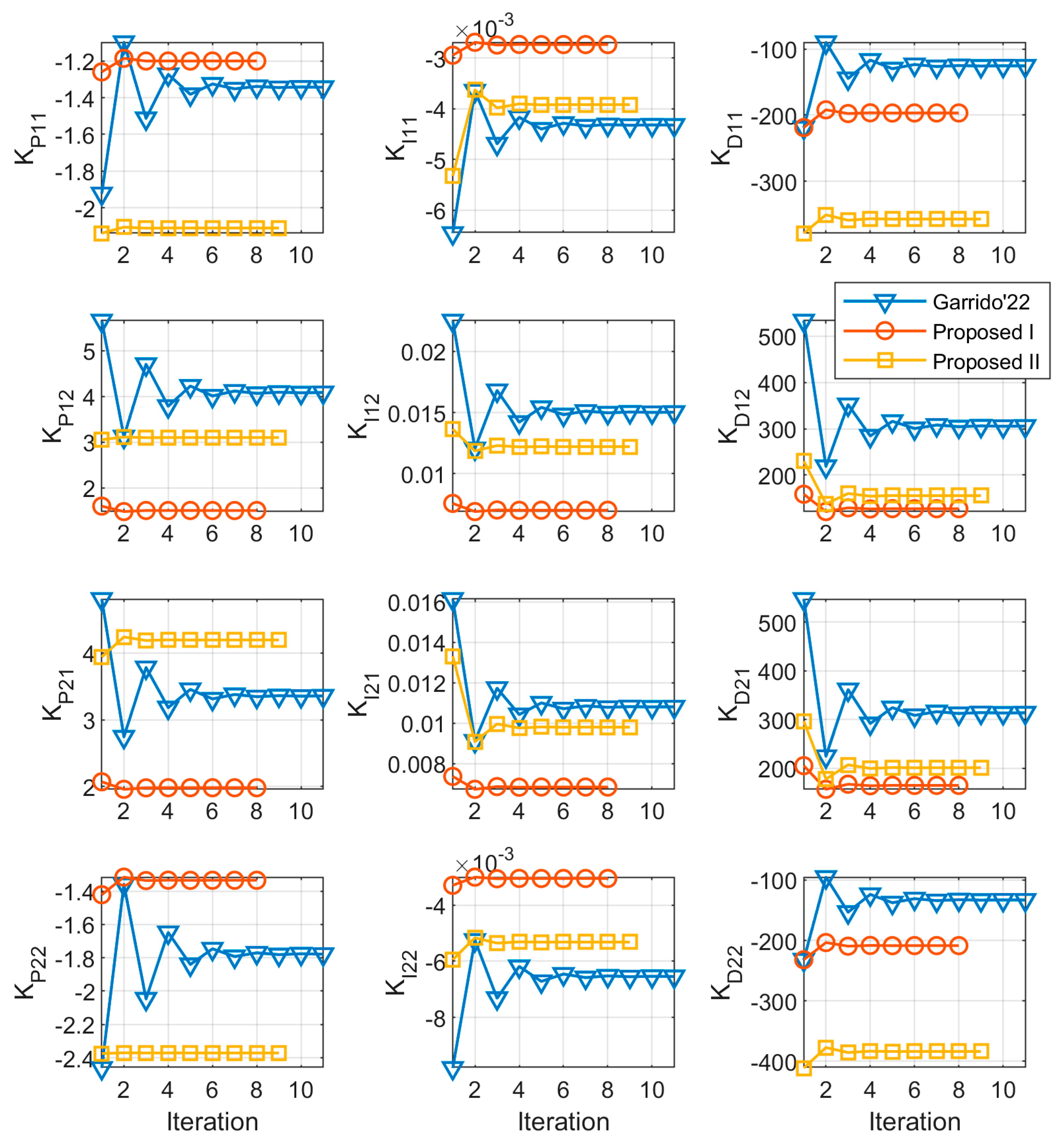
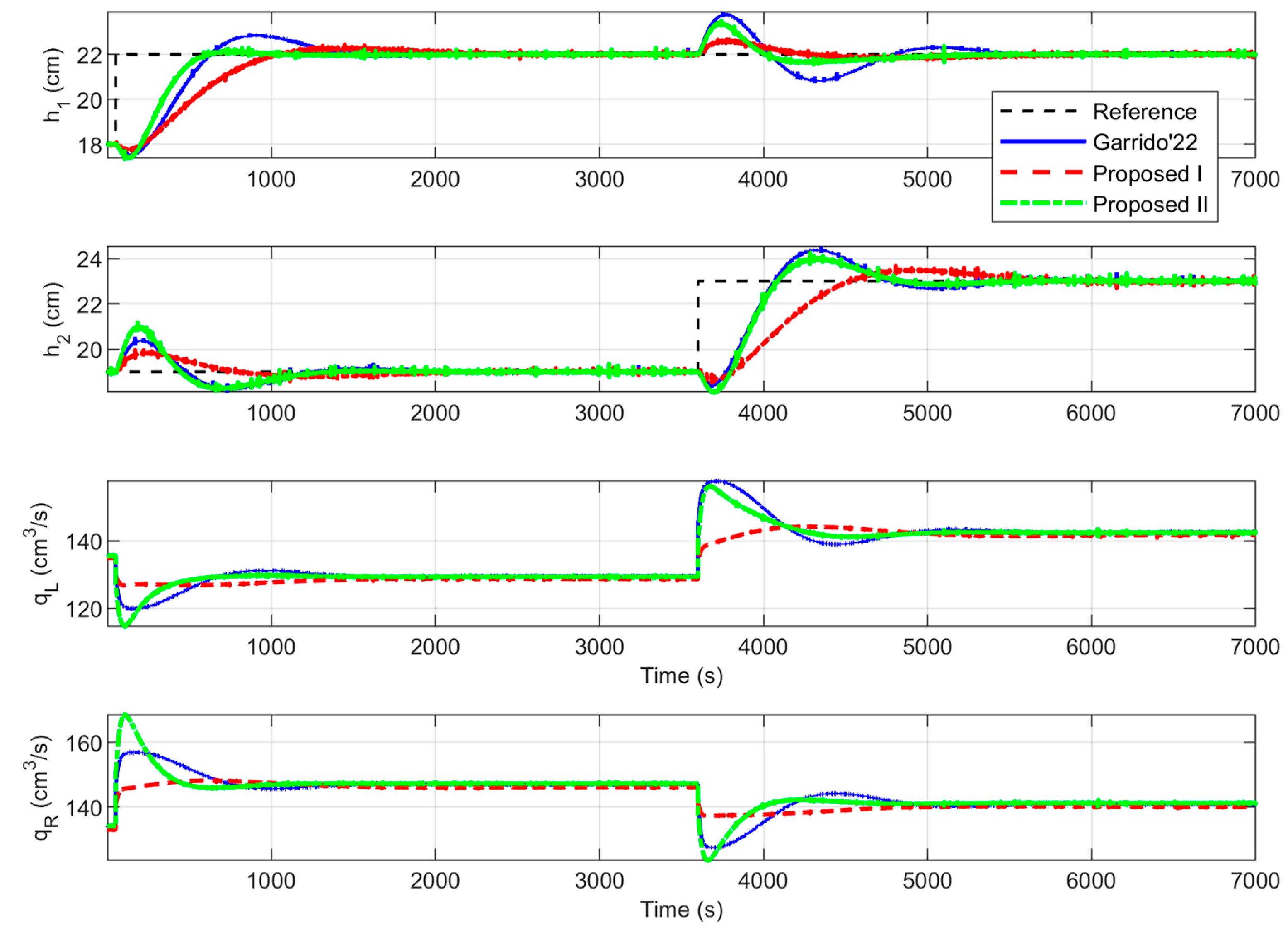
4.4. Example 4: Experimental Quadruple Tank System
5. Conclusions
- The complete design of the entire control matrix is formulated at each iteration as a single linear programming problem in which the frequency response of the ELTFs and the open-loop transfer functions are linearly parameterized with respect to the PID parameter vector. In this way, a better convergence is sought. In our previous work, each column of the controller matrix was separately designed;
- Two constraints are proposed to improve the decoupling performance: static decoupling at ω = 0 and decoupling at a frequency close to the crossover frequency of the ELTFs. These constraints not only manage to considerably reduce the interactions but also help to improve the convergence of the iterative procedure;
- Two possible optimizations are proposed according to the design specifications: (I) maximize the integral gains to optimize the disturbance rejection response while complying with a minimum linear robustness margin in each loop and (II) maximize the linear robustness margins of each loop while ensuring minimum bandwidth in each loop. In our previous work, the only option was optimization I;
- The new methodology has been extended not only for square processes but also for non-square systems.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Martínez-Luzuriaga, P.N.; Reynoso-Meza, G. Influencia de Los Hiper-Parámetros En Algoritmos Basados En Evolución Diferencial Para El Ajuste de Controladores del tipo PID en Procesos SISO. Rev. Iberoam. De Automática E Informática Ind. 2023, 20, 44–55. [Google Scholar] [CrossRef]
- De Aguiar, A.P.V.A.; Acioli, G.; Barros, P.R. Frequency-Based Multivariable Control Design with Stability Margin Constraints: A Linear Matrix Inequality Approach. J. Process Control 2023, 132, 103115. [Google Scholar] [CrossRef]
- Rojas, J.D.; Arrieta, O.; Vilanova, R. Industrial PID Controller Tuning with a Multiobjective Framework Using MATLAB®, 1st ed.; Springer: Cham, Swizterland, 2022; ISBN 978-3-030-72313-2. [Google Scholar]
- Hägglund, T. The One-Third Rule for PI Controller Tuning. Comput. Chem. Eng. 2019, 127, 25–30. [Google Scholar] [CrossRef]
- Garrido, J.; Vázquez, F.; Morilla, F. Multivariable PID Control by Decoupling. Int. J. Syst. Sci. 2016, 47, 1054–1072. [Google Scholar] [CrossRef]
- Jeng, J.C.; Lee, M.W. Multi-Loop PID Controllers Design with Reduced Loop Interactions Based on a Frequency-Domain Direct Synthesis Method. J. Frankl. Inst. 2023, 360, 2476–2506. [Google Scholar] [CrossRef]
- Mahapatro, S.R.; Subudhi, B. A New Hinf Weighted Sensitive Function Based Robust Multi-Loop PID Controller for a Multi-Variable System. IEEE Trans. Circuits Syst. II Express Briefs, 2023; early access. [Google Scholar] [CrossRef]
- Hovd, M.; Skogestad, S. Sequential Design of Decentralized Controllers. Automatica 1994, 30, 1601–1607. [Google Scholar] [CrossRef]
- Mahapatro, S.R.; Subudhi, B. A Robust Decentralized PID Controller Based on Complementary Sensitivity Function for a Multivariable System. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 2024–2028. [Google Scholar] [CrossRef]
- Euzebio, T.A.M.; Da Silva, M.T.; Yamashita, A.S. Decentralized PID Controller Tuning Based on Nonlinear Optimization to Minimize the Disturbance Effects in Coupled Loops. IEEE Access 2021, 9, 156857–156867. [Google Scholar] [CrossRef]
- Euzébio, T.A.M.; Yamashita, A.S.; Pinto, T.V.B.; Barros, P.R. SISO Approaches for Linear Programming Based Methods for Tuning Decentralized PID Controllers. J. Process Control 2020, 94, 75–96. [Google Scholar] [CrossRef]
- Garrido, J.; Ruz, M.L.; Morilla, F.; Vázquez, F. Iterative Method for Tuning Multiloop Pid Controllers Based on Single Loop Robustness Specifications in the Frequency Domain. Processes 2021, 9, 140. [Google Scholar] [CrossRef]
- Arrieta, O.; Vilanova, R. Simple Servo/Regulation Proportional-Integral-Derivative (PID) Tuning Rules for Arbitrary M s-Based Robustness Achievement. Ind. Eng. Chem. Res. 2012, 51, 2666–2674. [Google Scholar] [CrossRef]
- Vilanova, R.; Arrieta, O.; Ponsa, P. Robust PI/PID Controllers for Load Disturbance Based on Direct Synthesis. ISA Trans. 2018, 81, 177–196. [Google Scholar] [CrossRef]
- Liu, L.; Tian, S.; Xue, D.; Zhang, T.; Chen, Y.Q.; Zhang, S. A Review of Industrial MIMO Decoupling Control. Int. J. Control Autom. Syst. 2019, 17, 1246–1254. [Google Scholar] [CrossRef]
- Garrido, J.; Vázquez, F.; Morilla, F. Centralized Multivariable Control by Simplified Decoupling. J. Process Control 2012, 22, 1044–1062. [Google Scholar] [CrossRef]
- Dhanya Ram, V.; Chidambaram, M. Simple Method of Designing Centralized PI Controllers for Multivariable Systems Based on SSGM. ISA Trans. 2015, 56, 252–260. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.G.; Zhang, Y.; Chiu, M. Sen Non-Interacting Control Design for Multivariable Industrial Processes. J. Process Control 2003, 13, 253–265. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, W.; Gao, F. Analytical Decoupling Control Strategy Using a Unity Feedback Control Structure for MIMO Processes with Time Delays. J. Process Control 2007, 17, 173–186. [Google Scholar] [CrossRef]
- Saeki, M.; Ogawa, M.; Wada, N. Low-Order H∞ Controller Design on the Frequency Domain by Partial Optimization. Int. J. Robust Nonlinear Control 2010, 20, 323–333. [Google Scholar] [CrossRef]
- Jeng, J.C.; Jian, Y.S.; Lee, M.W. Data-Based Design of Centralized PID Controllers for Decoupling Control of Multivariable Processes. In Proceedings of the 2017 6th International Symposium on Advanced Control of Industrial Processes, AdCONIP 2017, Taipei, Taiwan, 28–31 May 2017; pp. 505–510. [Google Scholar] [CrossRef]
- Vilanova, R.; Visioli, A. PID Control in the Third Millennium; Vilanova, R., Visioli, A., Eds.; Springer: London, UK, 2012; ISBN 978-1-4471-2424-5. [Google Scholar]
- Zheng, F.; Wang, Q.-G.; Lee, T.H. On the Design of Multivariable PID Controllers via LMI Approach. Automatica 2002, 38, 517–526. [Google Scholar] [CrossRef]
- He, Y.; Wang, Q.G. An Improved ILMI Method for Static Output Feedback Control with Application to Multivariable PID Control. IEEE Trans. Automat. Contr. 2006, 51, 1678–1683. [Google Scholar] [CrossRef]
- Merrikh-Bayat, F. An Iterative LMI Approach for H∞ Synthesis of Multivariable PI/PD Controllers for Stable and Unstable Processes. Chem. Eng. Res. Des. 2018, 132, 606–615. [Google Scholar] [CrossRef]
- Luan, X.; Chen, Q.; Liu, F. Centralized PI Control for High Dimensional Multivariable Systems Based on Equivalent Transfer Function. ISA Trans. 2014, 53, 1554–1561. [Google Scholar] [CrossRef] [PubMed]
- Khandelwal, S.; Detroja, K.P. The Optimal Detuning Approach Based Centralized Control Design for MIMO Processes. J. Process Control 2020, 96, 23–36. [Google Scholar] [CrossRef]
- Xiong, Q.; Cai, W.-J.; He, M.-J. Equivalent Transfer Function Method for PI/PID Controller Design of MIMO Processes. J. Process Control 2007, 17, 665–673. [Google Scholar] [CrossRef]
- Shen, Y.; Cai, W.-J.; Li, S. Normalized Decoupling Control for High-Dimensional MIMO Processes for Application in Room Temperature Control HVAC Systems. Control Eng. Pract. 2010, 18, 652–664. [Google Scholar] [CrossRef]
- Vijay Kumar, V.; Rao, V.S.R.; Chidambaram, M. Centralized PI Controllers for Interacting Multivariable Processes by Synthesis Method. ISA Trans. 2012, 51, 400–409. [Google Scholar] [CrossRef]
- Davison, E. Some Properties of Minimum Phase Systems and “Squared-down” Systems. IEEE Trans. Automat. Contr. 1983, 28, 221–222. [Google Scholar] [CrossRef]
- Jin, Q.B.; Hao, F.; Wang, Q. A Multivariable IMC-PID Method for Non-Square Large Time Delay Systems Using NPSO Algorithm. J. Process Control 2013, 23, 649–663. [Google Scholar] [CrossRef]
- Shen, Y.; Sun, Y.; Xu, W. Centralized PI/PID Controller Design for Multivariable Processes. Ind. Eng. Chem. Res. 2014, 53, 10439–10447. [Google Scholar] [CrossRef]
- Jin, Q.; Du, X.; Jiang, B. Novel Centralized IMC-PID Controller Design for Multivariable Processes with Multiple Time Delays. Ind. Eng. Chem. Res. 2017, 56, 4431–4445. [Google Scholar] [CrossRef]
- Boyd, S.; Hast, M.; Åström, K.J. MIMO PID Tuning via Iterated LMI Restriction. Int. J. Robust Nonlinear Control 2016, 26, 1718–1731. [Google Scholar] [CrossRef]
- Ghosh, S.; Pan, S. Centralized PI Controller Design Method for MIMO Processes Based on Frequency Response Approximation. ISA Trans. 2021, 110, 117–128. [Google Scholar] [CrossRef]
- De Aguiar, A.P.V.A.; Acioli, G.; Barros, P.R.; Perkusich, A. A Closed-Loop Frequency Domain PI Retuning Technique for Multivariable Systems. IFAC-Pap. 2021, 54, 463–468. [Google Scholar] [CrossRef]
- Karimi, A.; Kammer, C. A Data-Driven Approach to Robust Control of Multivariable Systems by Convex Optimization. Automatica 2017, 85, 227–233. [Google Scholar] [CrossRef]
- Garrido, J.; Ruz, M.L.; Morilla, F.; Vázquez, F. Iterative Design of Centralized PID Controllers Based on Equivalent Loop Transfer Functions and Linear Programming. IEEE Access 2022, 10, 1440–1450. [Google Scholar] [CrossRef]
- Karimi, A.; Kunze, M.; Longchamp, R. Robust Controller Design by Linear Programming with Application to a Double-Axis Positioning System. Control Eng. Pract. 2007, 15, 197–208. [Google Scholar] [CrossRef]
- Åström, K.J.; Hägglund, T. Advanced PID Control; ISA-The Instrumentation, Systems, and Automation Society: Research Triangle Park, NC, USA, 2005. [Google Scholar]
- Wood, R.K.; Berry, M.W. Terminal Composition Control of a Binary Distillation Column. Chem. Eng. Sci. 1973, 28, 1707–1717. [Google Scholar] [CrossRef]
- Feng, Z.Y.; Guo, H.; She, J.; Xu, L. Weighted Sensitivity Design of Multivariable PID Controllers via a New Iterative LMI Approach. J. Process Control 2022, 110, 24–34. [Google Scholar] [CrossRef]
- Ogunnaike, B.A.; Lemaire, J.P.; Morari, M.; Ray, W.H. Advanced Multivariable Control of a Pilot-plant Distillation Column. AIChE J. 1983, 29, 632–640. [Google Scholar] [CrossRef]
- Da Silva, M.T.; Barros, P.R. An Iterative Procedure for Tuning Decentralized PID Controllers Based on Effective Open-Loop Process. In Proceedings of the 7th International Conference on Control, Decision and Information Technologies, CoDIT 2020, Prague, Czech Republic, 29 June–2 July 2020; pp. 813–818. [Google Scholar] [CrossRef]
- Johansson, K.H.; Nunes, J.L.R. A Multivariable Laboratory Process with an Adjustable Zero. Proc. Am. Control. Conf. 1998, 4, 2045–2049. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Loop | ϕm | Am | Ms | ωcp (rad/min) | IAE | TV |
|---|---|---|---|---|---|---|---|
| Proposed | 1 | 54.67 | 3.99 | 1.48 | 0.403 | 11.88 | 1.83 |
| 2 | 61.36 | 3.75 | 1.51 | 0.181 | 34.82 | 1.51 | |
| Feng | 1 | 76.47 | 3.36 | 1.69 | 0.23 | 15.67 | 2.11 |
| 2 | 45.21 | 2.22 | 1.95 | 0.21 | 39.96 | 2.06 | |
| Jeng | 1 | 63.5 | 3.86 | 1.57 | 0.31 | 17.74 | 1.39 |
| 2 | 66.4 | 2.71 | 1.65 | 0.13 | 56.33 | 1.16 |
| Method | Loop | ϕm | Am | Ms | ωcp (rad/min) | IAE | TV |
|---|---|---|---|---|---|---|---|
| Proposed | 1 | 77.52 | 6.67 | 1.18 | 0.081 | 13.44 | 4.16 |
| 2 | 73.04 | 5.37 | 1.26 | 0.086 | 22.30 | 2.55 | |
| 3 | 53.79 | 3.60 | 1.48 | 0.395 | 107.6 | 240.3 | |
| Silva | 1 | 63.32 | 4.92 | 1.42 | 0.191 | 12.85 | 4.38 |
| 2 | 55.06 | 7.4 | 1.67 | 0.191 | 32.12 | 2.61 | |
| 3 | 48.38 | 3.02 | 1.69 | 0.554 | 112.5 | 210.0 | |
| Ram | 1 | 62.11 | 4.83 | 1.33 | 0.120 | 10.38 | 4.85 |
| 2 | 71.07 | 2.57 | 1.64 | 0.118 | 23.70 | 3.87 | |
| 3 | 95.29 | 11.42 | 1.25 | 0.119 | 634.6 | 169.2 |
| Method | Loop | ϕm | Am | Ms | ωcp (rad/min) | IAE | TV |
|---|---|---|---|---|---|---|---|
| Proposed | 1 | 65.71 | 2.99 | 1.51 | 0.0077 | 297.3 | 1.0841 1.8018 0.4862 |
| 2 | 70.34 | 3.55 | 1.38 | 0.0121 | 253.7 | ||
| Ghosh | 1 | 65.32 | 2.66 | 1.67 | 0.007 | 328.5 | 0.3765 1.4852 0.7961 |
| 2 | 61.02 | 2.71 | 1.75 | 0.0127 | 264.1 | ||
| Jin | 1 | 69.79 | 2.42 | 1.73 | 0.006 | 343 | 0.8033 1.6588 0.1416 |
| 2 | 38.81 | 2.24 | 2.07 | 0.0202 | 451.2 |
| Method | loop | ϕm | Am | Ms | ωcp (rad/s) | IAE | TV |
|---|---|---|---|---|---|---|---|
| Proposed I | 1 | 65.7 | 5 | 1.26 | 2.1 × 10−3 | 2674.1 | 464.6 |
| 2 | 66.4 | 5 | 1.26 | 2.1 × 10−3 | 3117.4 | 446.8 | |
| Proposed II | 1 | 60.9 | 2.75 | 1.59 | 4 × 10−3 | 1950.8 | 699.3 |
| 2 | 56 | 2.72 | 1.58 | 4 × 10−3 | 2814.0 | 652.9 | |
| Garrido | 1 | 64.7 | 5 | 1.26 | 3 × 10−3 | 3233.8 | 705.3 |
| 2 | 64.4 | 5 | 1.25 | 4 × 10−3 | 2931.5 | 660.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garrido, J.; Garrido-Jurado, S.; Vázquez, F.; Arrieta, O. Design of Multivariable PID Control Using Iterative Linear Programming and Decoupling. Electronics 2024, 13, 698. https://doi.org/10.3390/electronics13040698
Garrido J, Garrido-Jurado S, Vázquez F, Arrieta O. Design of Multivariable PID Control Using Iterative Linear Programming and Decoupling. Electronics. 2024; 13(4):698. https://doi.org/10.3390/electronics13040698
Chicago/Turabian StyleGarrido, Juan, Sergio Garrido-Jurado, Francisco Vázquez, and Orlando Arrieta. 2024. "Design of Multivariable PID Control Using Iterative Linear Programming and Decoupling" Electronics 13, no. 4: 698. https://doi.org/10.3390/electronics13040698
APA StyleGarrido, J., Garrido-Jurado, S., Vázquez, F., & Arrieta, O. (2024). Design of Multivariable PID Control Using Iterative Linear Programming and Decoupling. Electronics, 13(4), 698. https://doi.org/10.3390/electronics13040698