


Seismic Event Detection in the Copahue Volcano Based on Machine Learning: Towards an On-the-Edge Implementation

 , ,
, ,  , and
, and
Abstract
1. Introduction
- Presented a software/hardware co-design for volcanic seismic event detection based on digital signal processing techniques and ML while considering a multichannel approach;
- Showed the implementation of an event detection process on a system (SoC) based on a field-programmable gate array (FPGA) to provide data about resource utilization, latency, and power consumption;
- Exposed insights regarding the integration of a low-end SoC device into the acquisition node as an event-triggered system based on ML to operate on the edge; this can prove valuable in other scenarios, such as landslides or rockfalls, where stations are deployed solely for data collection.
2. Materials and Methods
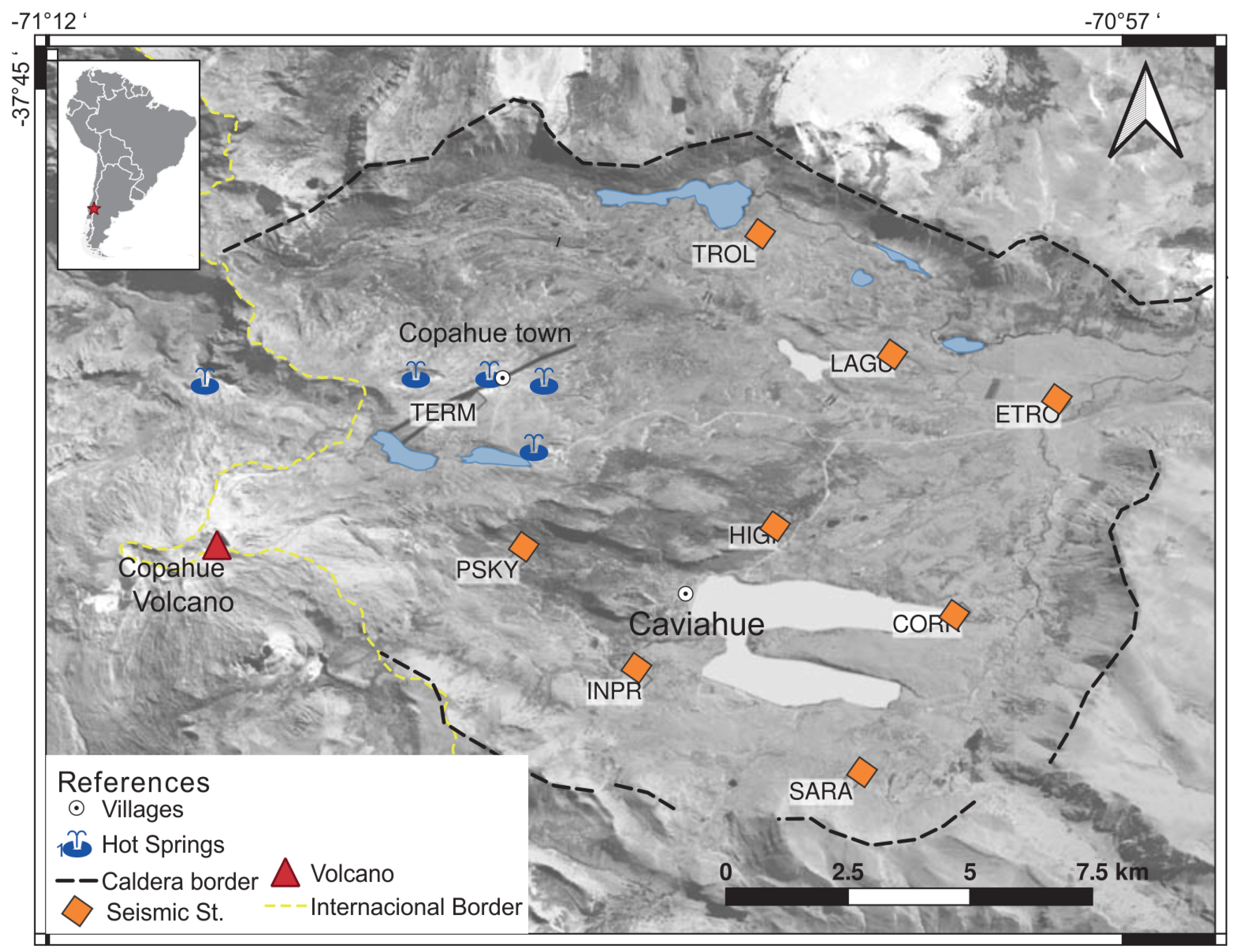
2.1. Geological Setting and Data
2.2. Volcanic Seismic Event Detection
2.2.1. Data Curation and Enrichment
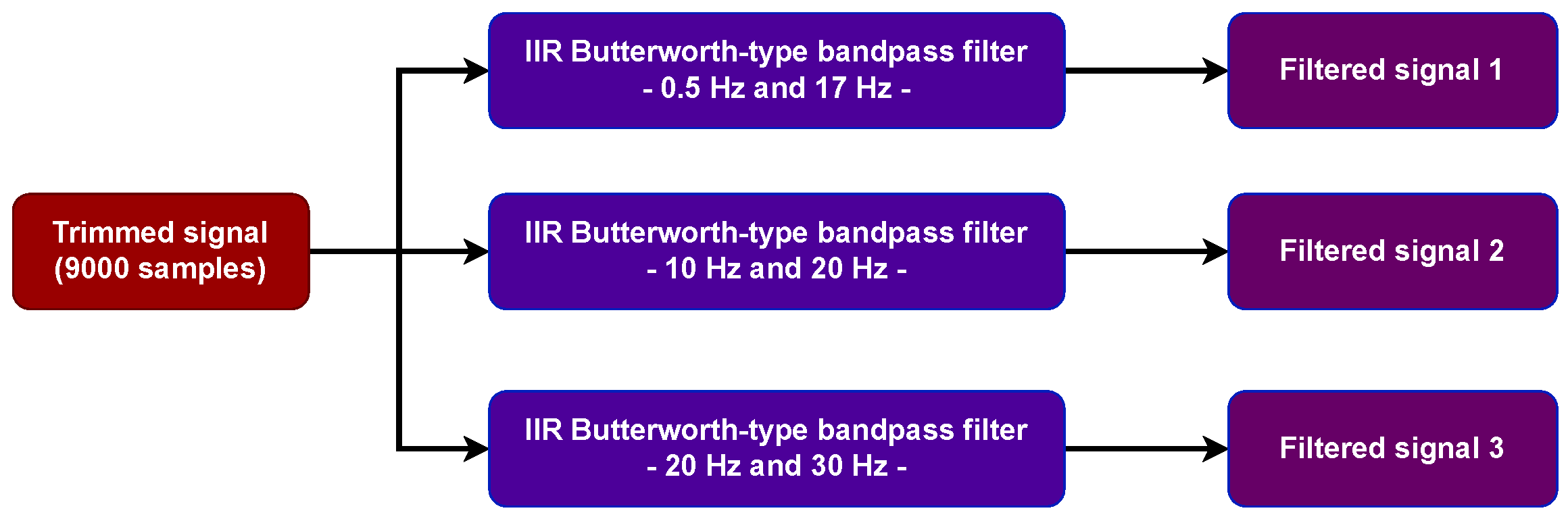
- Time domain: To obtain features in the time domain, we utilized the filtered traces within the 0.5–17 Hz frequency band.
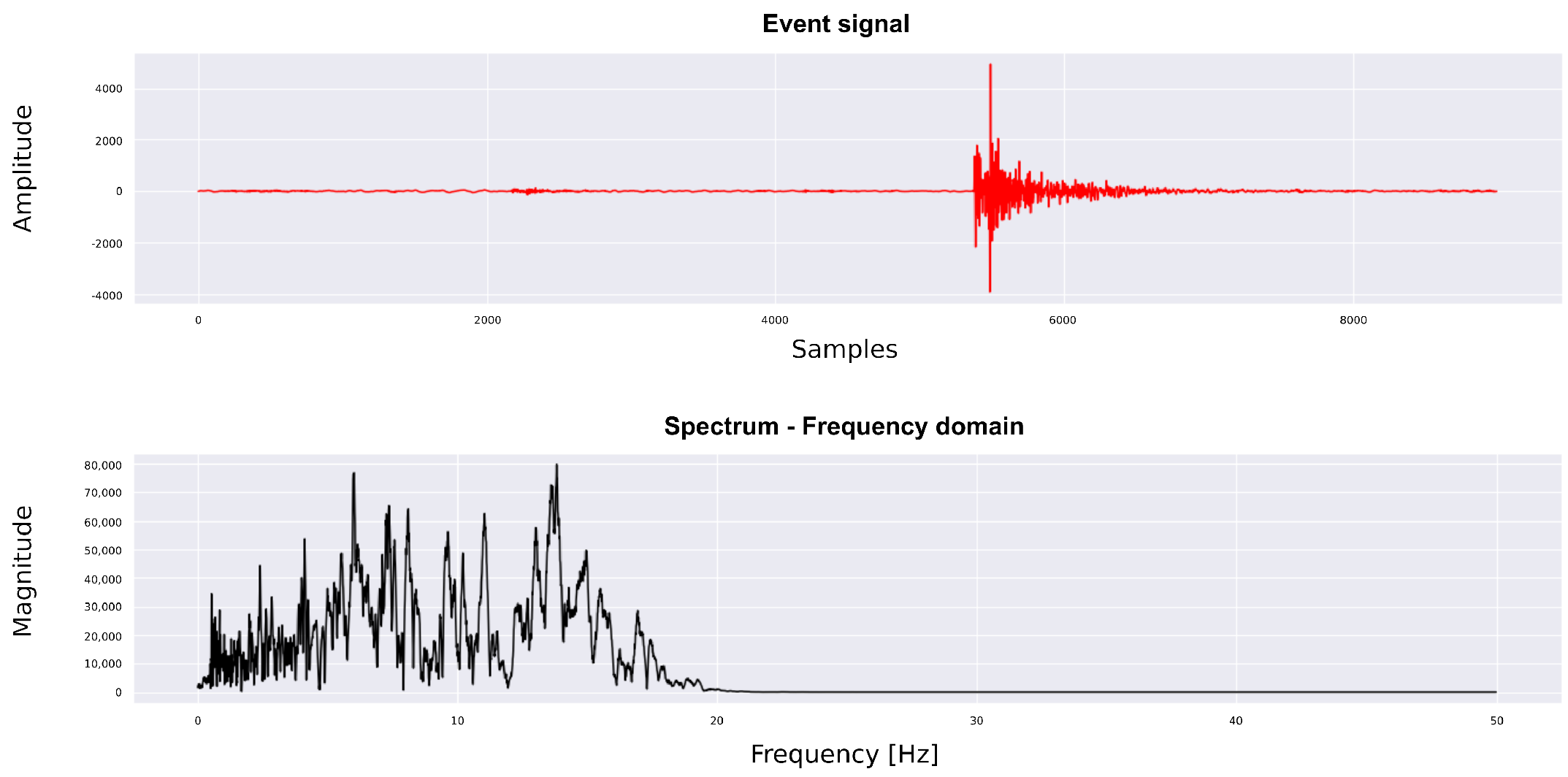
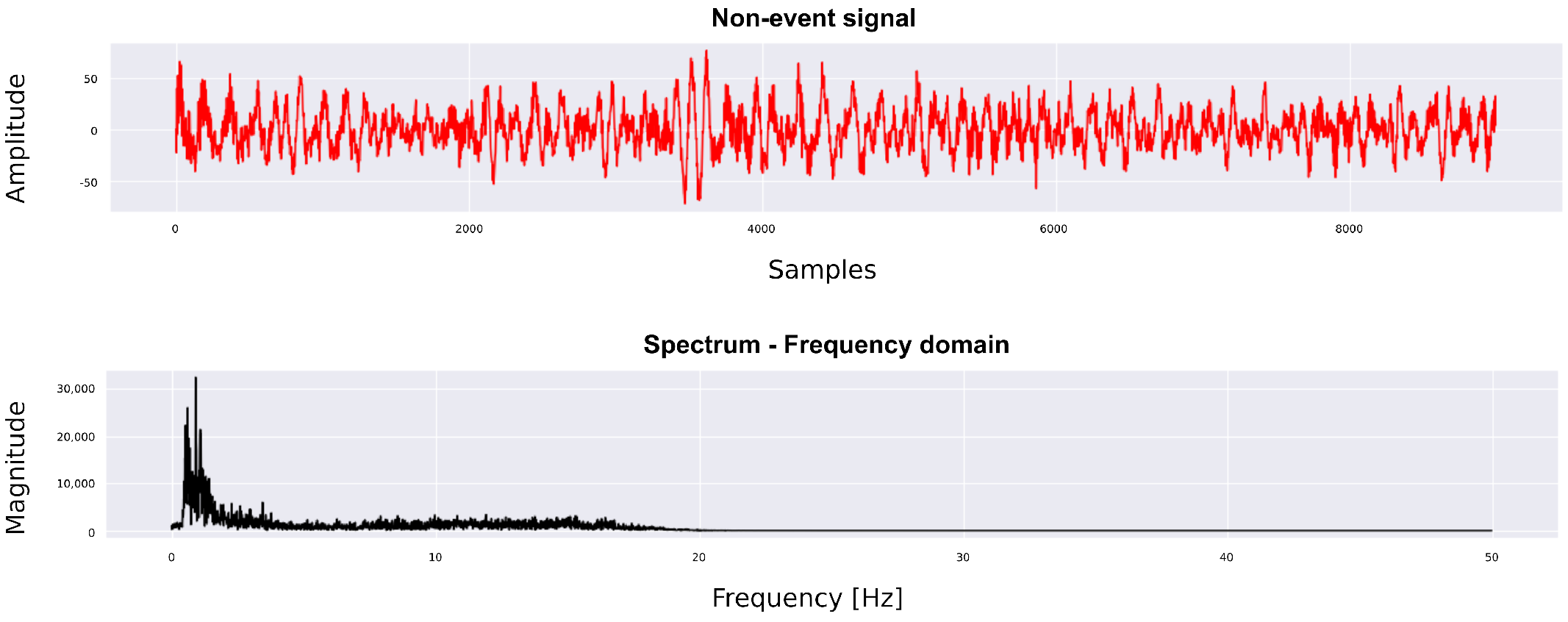
- Frequency domain: The discrete Fourier transform (DFT) was computed from the signals filtered in the bands 0.5–17 Hz, 10–20 Hz, and 20–30 Hz. After the DFT, various features were extracted.
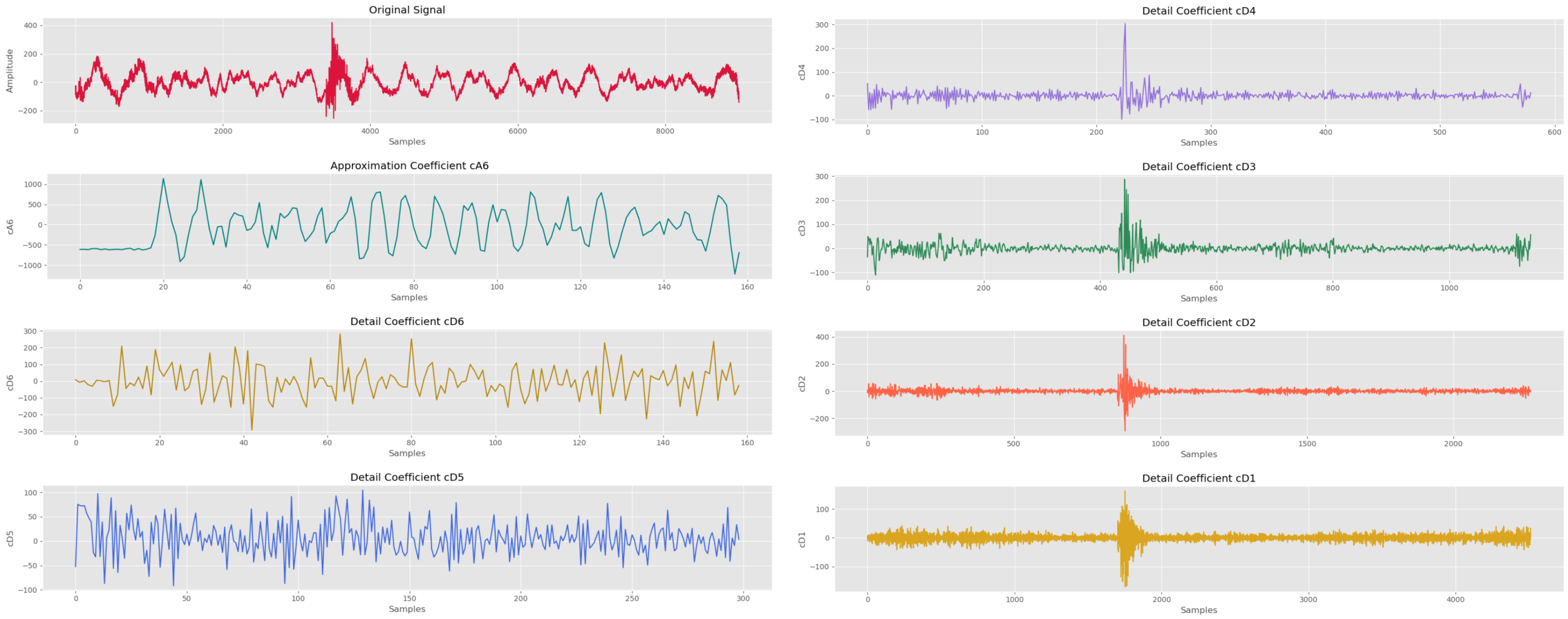
- Scale domain: The signal was filtered within the frequency range of 0.5–17 Hz and underwent the wavelet transform (WT), resulting in the extraction of approximation and detail coefficients.
- Average: The sum of a set of values , considering , divided by the total number of values n, as shown in Equation (1).
- Root mean square (RMS): Defined as the square root of the arithmetic mean of the square of data, as shown in Equation (2), where is the dataset and n is the total number of data.
- Kurtosis: Kurtosis is a measure of the extent of outliers in a dataset. For a normal distribution, the kurtosis statistic has a value of 0. A positive kurtosis indicates that the data exhibit more extreme outliers than a normal distribution. Negative kurtosis indicates that the data have less extreme outliers than a normal distribution. Kurtosis (k) can be obtained using Equation (3), where n is the number of data points, is the i-th value of the data, is the mean or arithmetic average, and is the standard deviation of the dataset.
- Minimum: This is the lowest value that the signal takes within a specific time interval.
- Maximum: This is the highest value that the signal takes within a specific time interval and is defined by Equation (4), where corresponds to the signal.
- Time to reach the maximum value: Time taken for the signal to reach its maximum amplitude.
- Difference between maximum and minimum values of the signal: The difference between the maximum and minimum values of the signal is calculated.
- Difference between the maximum value and RMS: This is the difference between the maximum value of the signal and its RMS.
- Energy: Refers to the total amount of energy contained by the signal within a specified time interval. As seen in Equation (5), it is calculated by summing the square of all the signal values within a given time interval.
- Maximum signal value in the 10–20 Hz frequency band: The highest value of the signal in the frequency domain is calculated for the 10–20 Hz frequency band.
- Maximum signal value in the 20–30 Hz frequency band: The highest value of the signal in the frequency domain is calculated for the 20–30 Hz frequency band.
- Maximum frequency value: The value at which the maximum frequency value occurs is obtained. This is performed for the 0.5–17 Hz frequency band.
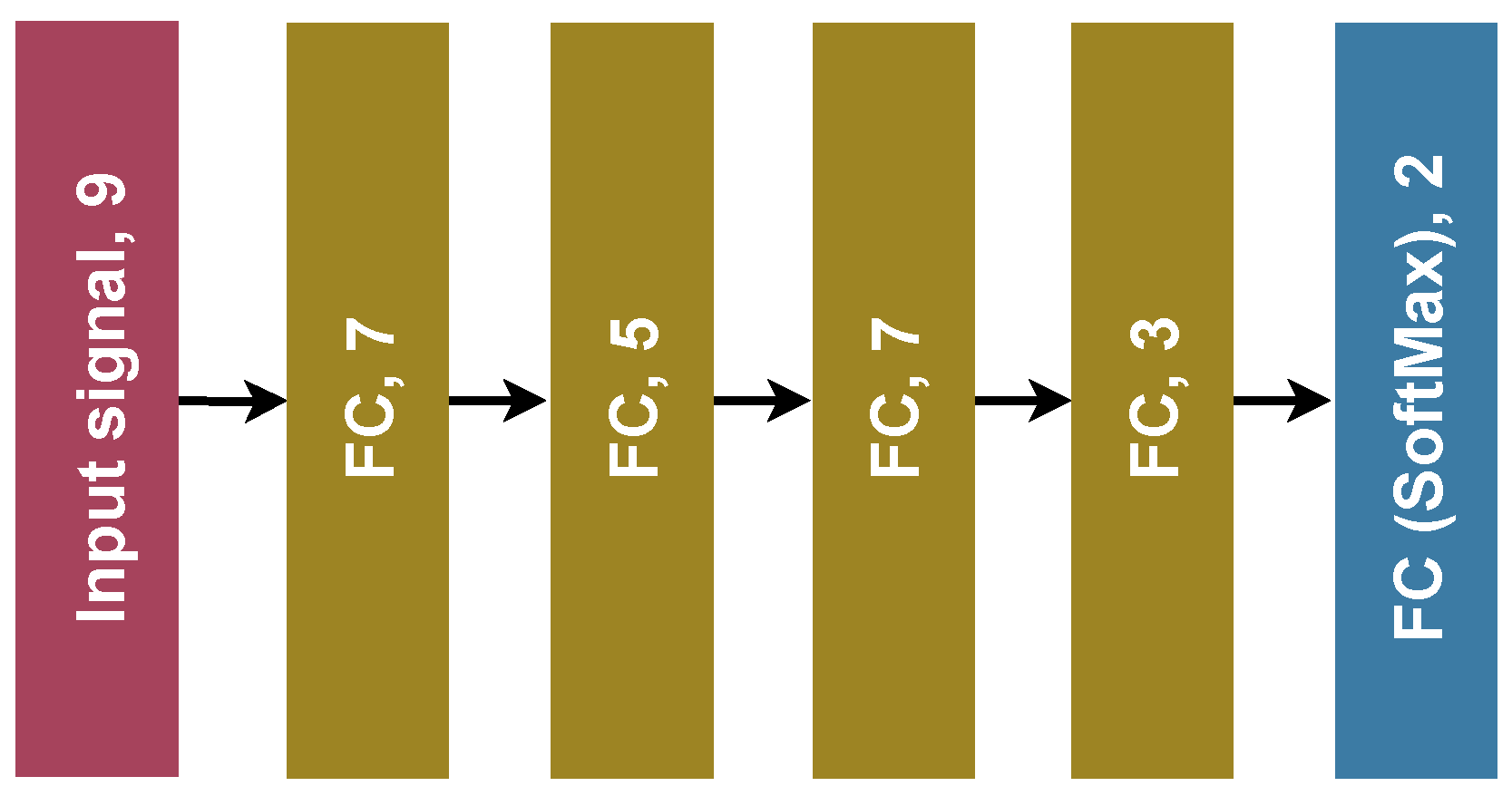
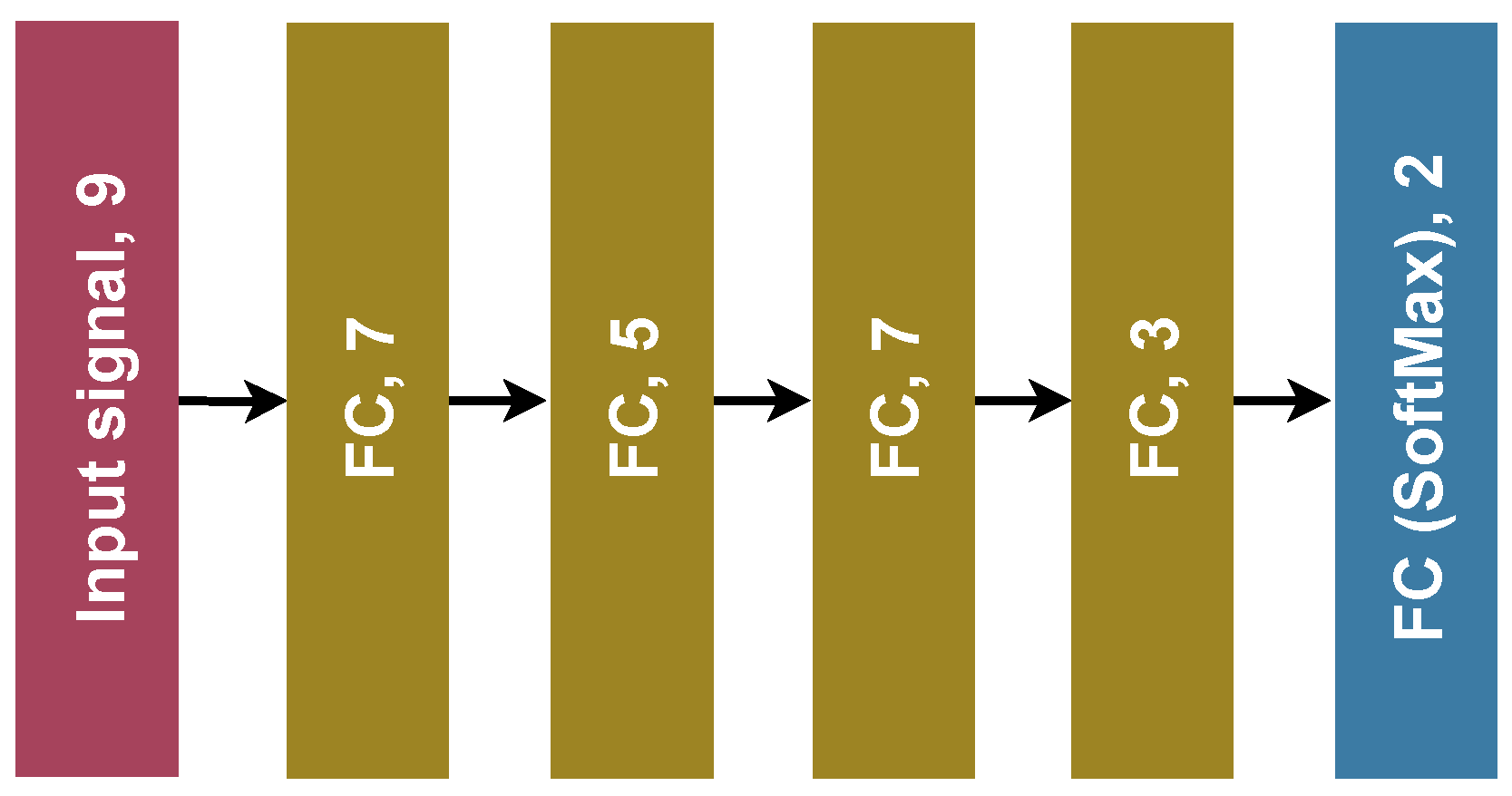
2.2.2. Machine Learning for Event Detection
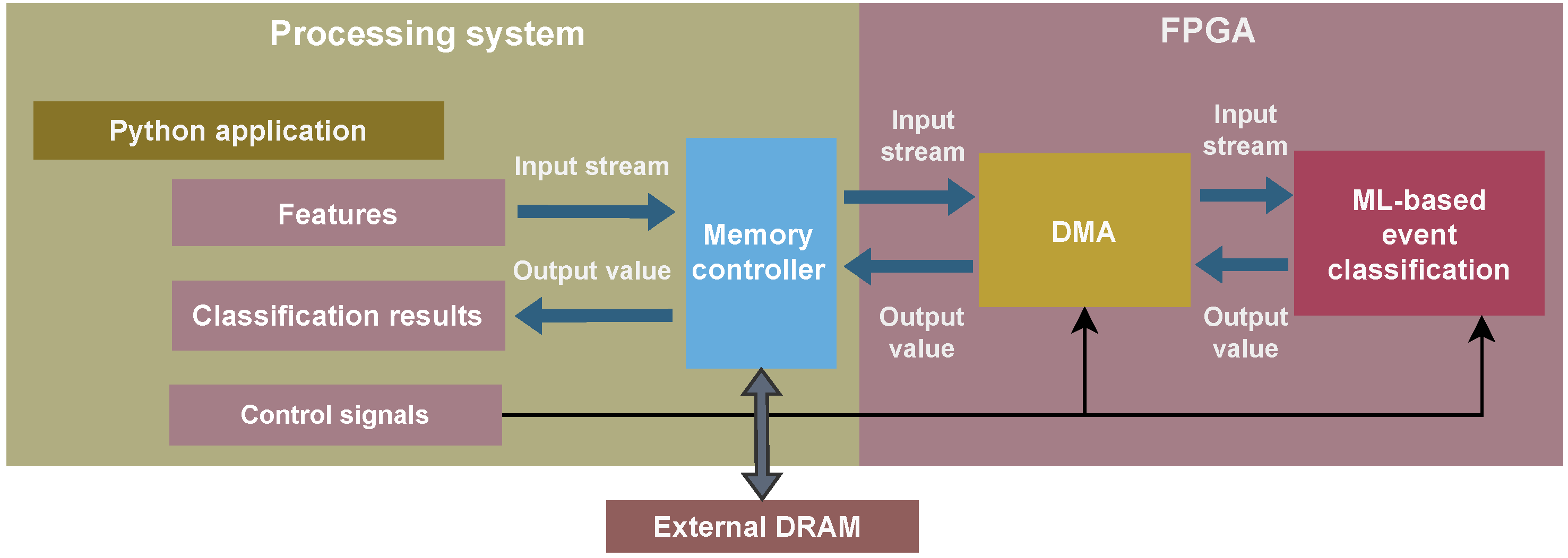
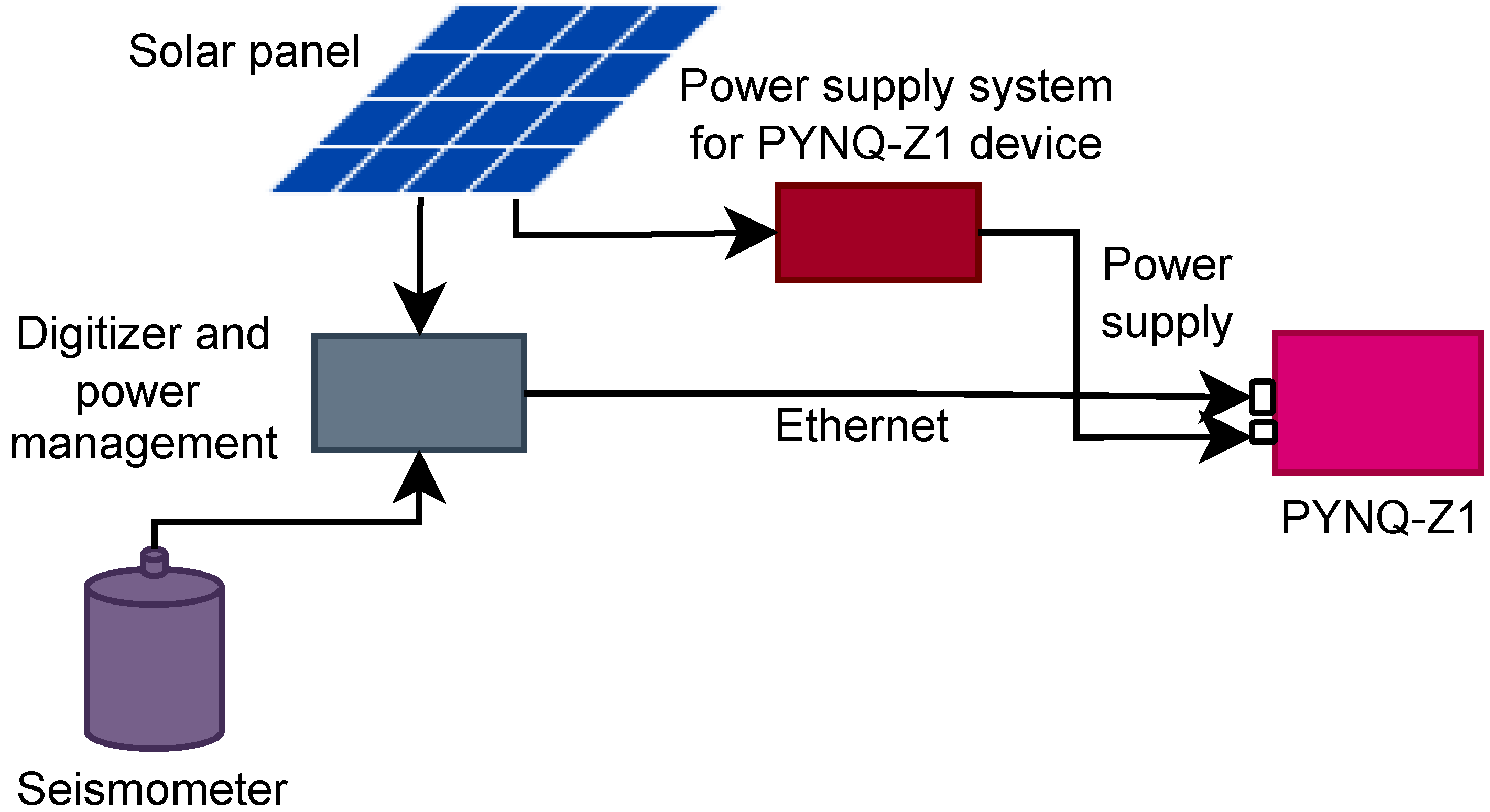
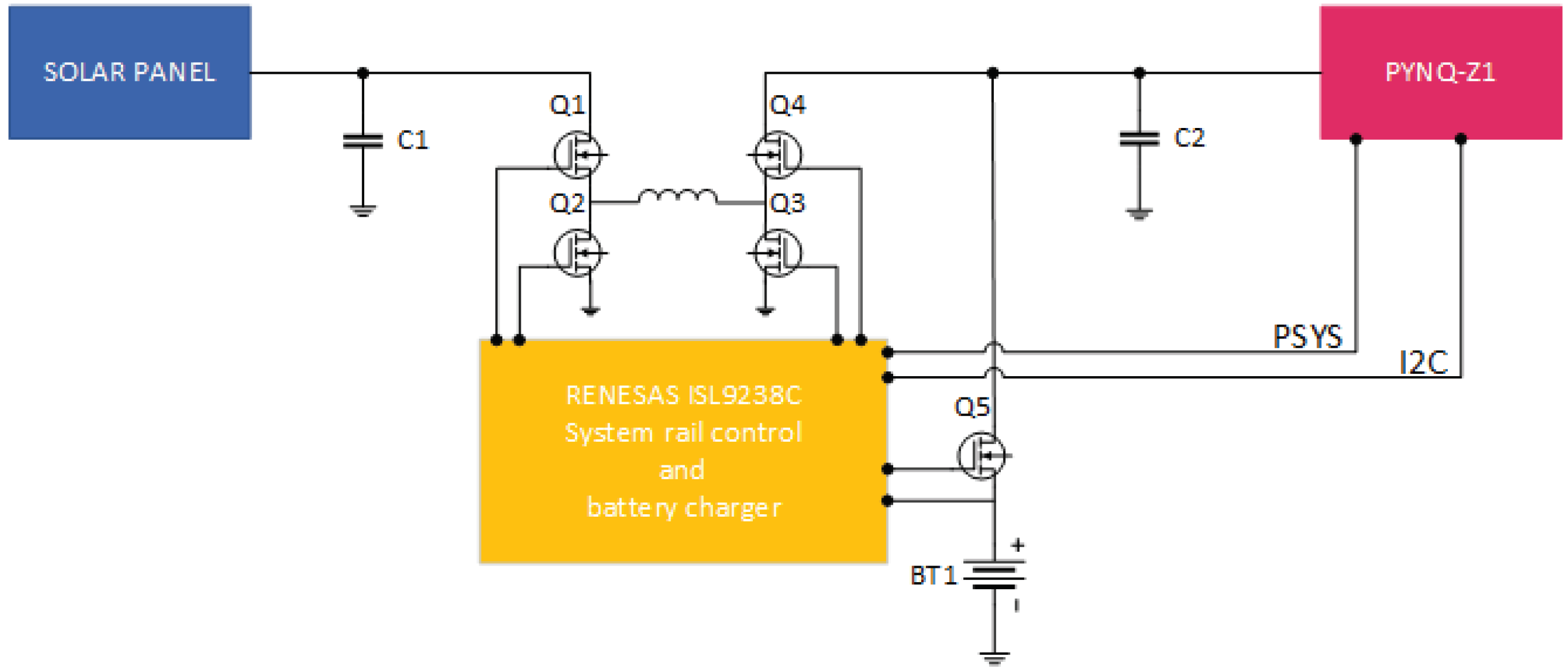
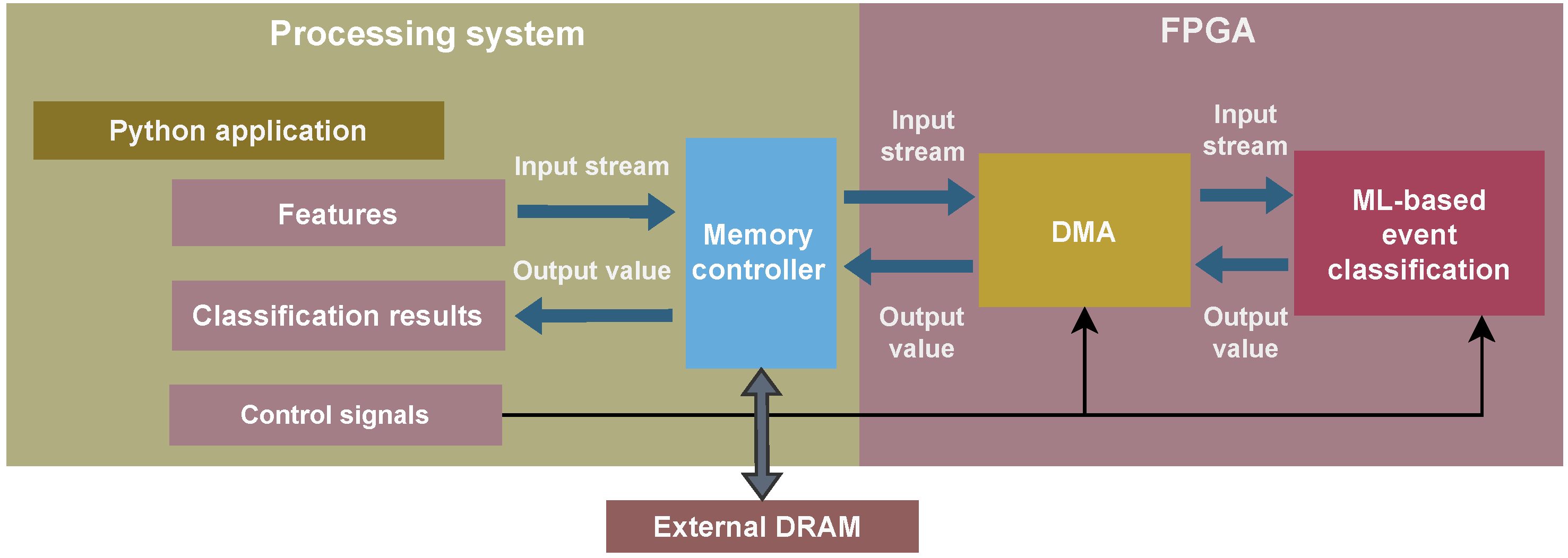
2.3. Software/Hardware Co-Design and PYNQ Framework
2.3.1. Hardware Platform Creation
2.3.2. Software Integration
3. Results
3.1. Feature Extraction
3.2. Machine Learning Model Assessment
4. Towards a Seismic Event Processing on the Edge
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 1D | One-Dimensional |
| A6 | Approximation Coefficient—Level 6 |
| A/D | Analog/Digital |
| DB10 | Daubechies 10 |
| CNN | Convolutional Neural Network |
| CP | Copahue Temporary Network |
| DFT | Discrete Fourier Transform |
| DMA | Direct Memory Access |
| FPGA | Field-Programmable Gate Array |
| HLS | High-Level Synthesis |
| HLS4ML | High-Level Synthesis For Machine Learning |
| I2C | Inter-Integrated Circuits |
| IIR | Infinite Impulse Response |
| IP | Intellectual Property |
| LP | Long Period |
| ML | Machine Learning |
| MLP | Multi-Layer Perceptron |
| PSD | Power Spectral Density |
| PYNQ | Python productivity for Zynq |
| RMS | Root-Mean Square |
| RNN | Recurrent Neural Network |
| ROC | Receiver Operating Characteristic Curve |
| SoC | System on Chip |
| STA/LTA | Short-Time Average over Long-Time Average |
| UAV | Unmanned Aerial Vehicle |
| VT | Volcanic Tectonic |
| WT | Wavelet Transform |
References
- Cashman, K.V.; Sparks, R.S.J. How volcanoes work: A 25 year perspective. Bulletin 2013, 125, 664–690. [Google Scholar] [CrossRef]
- Chouet, B.A.; Matoza, R.S. A multi-decadal view of seismic methods for detecting precursors of magma movement and eruption. J. Volcanol. Geotherm. Res. 2013, 252, 108–175. [Google Scholar] [CrossRef]
- Saccorotti, G.; Lokmer, I. Chapter 2—A review of seismic methods for monitoring and understanding active volcanoes. In Forecasting and Planning for Volcanic Hazards, Risks, and Disasters; Papale, P., Ed.; Hazards and Disasters Series; Elsevier: Amsterdam, The Netherlands, 2021; Volume 2, pp. 25–73. [Google Scholar] [CrossRef]
- Allen, R.V. Automatic earthquake recognition and timing from single traces. Bull. Seismol. Soc. Am. 1978, 68, 1521–1532. [Google Scholar] [CrossRef]
- Trnkoczy, A. Understanding and parameter setting of STA/LTA trigger algorithm. In New Manual of Seismological Observatory Practice (NMSOP); Deutsches GeoForschungsZentrum GFZ: Potsdam, Germany, 2009; pp. 1–20. [Google Scholar]
- Mousavi, S.M.; Zhu, W.; Sheng, Y.; Beroza, G.C. CRED: A deep residual network of convolutional and recurrent units for earthquake signal detection. Sci. Rep. 2019, 9, 10267. [Google Scholar] [CrossRef]
- Li, J.; He, M.; Cui, G.; Wang, X.; Wang, W.; Wang, J. A novel method of seismic signal detection using waveform features. Appl. Sci. 2020, 10, 2919. [Google Scholar] [CrossRef]
- Vaezi, Y.; Van der Baan, M. Comparison of the STA/LTA and power spectral density methods for microseismic event detection. Geophys. J. Int. 2015, 203, 1896–1908. [Google Scholar] [CrossRef]
- Li, W.; Chakraborty, M.; Fenner, D.; Faber, J.; Zhou, K.; Rümpker, G.; Stöcker, H.; Srivastava, N. EPick: Attention-based multi-scale UNet for earthquake detection and seismic phase picking. Front. Earth Sci. 2022, 10, 953007. [Google Scholar] [CrossRef]
- Marsi, S.; Bhattacharya, J.; Molina, R.; Ramponi, G. A non-linear convolution network for image processing. Electronics 2021, 10, 201. [Google Scholar] [CrossRef]
- Park, Y.H.; Choi, S.H.; Kwon, Y.J.; Kwon, S.W.; Kang, Y.J.; Jun, T.H. Detection of Soybean Insect Pest and a Forecasting Platform Using Deep Learning with Unmanned Ground Vehicles. Agronomy 2023, 13, 477. [Google Scholar] [CrossRef]
- Peng, Z.; Yang, J.; Chen, T.H.; Ma, L. A first look at the integration of machine learning models in complex autonomous driving systems: A case study on Apollo. In Proceedings of the 28th ACM Joint Meeting on European Software Engineering Conference and Symposium on the Foundations of Software Engineering, Virtual, 8–13 November 2020; pp. 1240–1250. [Google Scholar]
- Qureshi, I.; Yan, J.; Abbas, Q.; Shaheed, K.; Riaz, A.B.; Wahid, A.; Khan, M.W.J.; Szczuko, P. Medical image segmentation using deep semantic-based methods: A review of techniques, applications and emerging trends. Inf. Fusion 2023, 90, 316–352. [Google Scholar] [CrossRef]
- Biggs, J.; Anantrasirichai, N.; Albino, F.; Lazecky, M.; Maghsoudi, Y. Large-scale demonstration of machine learning for the detection of volcanic deformation in Sentinel-1 satellite imagery. Bull. Volcanol. 2022, 84, 100. [Google Scholar] [CrossRef] [PubMed]
- Falanga, M.; De Lauro, E.; Petrosino, S.; Rincon-Yanez, D.; Senatore, S. Semantically enhanced IoT-oriented seismic event detection: An application to Colima and Vesuvius volcanoes. IEEE Internet Things J. 2022, 9, 9789–9803. [Google Scholar] [CrossRef]
- Del Rosso, M.P.; Sebastianelli, A.; Spiller, D.; Ullo, S.L. A demo setup testing onboard CNNs for Volcanic Eruption Detection. In Proceedings of the 2022 IEEE International Conference on Metrology for Extended Reality, Artificial Intelligence and Neural Engineering (MetroXRAINE), Rome, Italy, 26–28 October 2022; pp. 719–724. [Google Scholar]
- Malfante, M.; Dalla Mura, M.; Métaxian, J.P.; Mars, J.I.; Macedo, O.; Inza, A. Machine learning for volcano-seismic signals: Challenges and perspectives. IEEE Signal Process. Mag. 2018, 35, 20–30. [Google Scholar] [CrossRef]
- Anantrasirichai, N.; Biggs, J.; Albino, F.; Hill, P.; Bull, D. Application of machine learning to classification of volcanic deformation in routinely generated InSAR data. J. Geophys. Res. Solid Earth 2018, 123, 6592–6606. [Google Scholar] [CrossRef]
- Carniel, R.; Guzmán, S.R. Machine Learning in Volcanology: A Review. In Updates in Volcanology; Németh, K., Ed.; IntechOpen: Rijeka, Croatia, 2020. [Google Scholar] [CrossRef]
- Duque, A.; González, K.; Pérez, N.; Benítez, D.; Grijalva, F.; Lara-Cueva, R.; Ruiz, M. Exploring the unsupervised classification of seismic events of Cotopaxi volcano. J. Volcanol. Geotherm. Res. 2020, 403, 107009. [Google Scholar] [CrossRef]
- Lara-Cueva, R.; Bernal, P.; Saltos, M.G.; Benítez, D.S.; Rojo-Álvarez, J.L. Time and Frequency Feature Selection for Seismic Events from Cotopaxi Volcano. In Proceedings of the 2015 Asia-Pacific Conference on Computer Aided System Engineering, Quito, Ecuador, 14–16 July 2015; pp. 129–134. [Google Scholar] [CrossRef]
- Lara, P.E.E.; Fernandes, C.A.R.; Inza, A.; Mars, J.I.; Métaxian, J.P.; Dalla Mura, M.; Malfante, M. Automatic Multichannel Volcano-Seismic Classification Using Machine Learning and EMD. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1322–1331. [Google Scholar] [CrossRef]
- Witsil, A.J.; Johnson, J.B. Analyzing continuous infrasound from Stromboli volcano, Italy using unsupervised machine learning. Comput. Geosci. 2020, 140, 104494. [Google Scholar] [CrossRef]
- Lapins, S.; Roman, D.C.; Rougier, J.; De Angelis, S.; Cashman, K.V.; Kendall, J.M. An examination of the continuous wavelet transform for volcano-seismic spectral analysis. J. Volcanol. Geotherm. Res. 2020, 389, 106728. [Google Scholar] [CrossRef]
- Laumann, P.; Srivastava, N.; Li, W.; Ruempker, G. Volcano-seismic event classification using wavelet scattering transforms. In Proceedings of the EGU23, the 25th EGU General Assembly, Vienna, Austria, 23–28 April 2023. [Google Scholar]
- Falcin, A.; Métaxian, J.P.; Mars, J.; Stutzmann, É.; Komorowski, J.C.; Moretti, R.; Malfante, M.; Beauducel, F.; Saurel, J.M.; Dessert, C.; et al. A machine-learning approach for automatic classification of volcanic seismicity at La Soufrière Volcano, Guadeloupe. J. Volcanol. Geotherm. Res. 2021, 411, 107151. [Google Scholar] [CrossRef]
- Titos, M.; Bueno, A.; García, L.; Benítez, M.C.; Ibañez, J. Detection and classification of continuous volcano-seismic signals with recurrent neural networks. IEEE Trans. Geosci. Remote Sens. 2018, 57, 1936–1948. [Google Scholar] [CrossRef]
- Canario, J.P.; Mello, R.; Curilem, M.; Huenupan, F.; Rios, R. In-depth comparison of deep artificial neural network architectures on seismic events classification. J. Volcanol. Geotherm. Res. 2020, 401, 106881. [Google Scholar] [CrossRef]
- Ren, C.X.; Peltier, A.; Ferrazzini, V.; Rouet-Leduc, B.; Johnson, P.A.; Brenguier, F. Machine learning reveals the seismic signature of eruptive behavior at Piton de la Fournaise volcano. Geophys. Res. Lett. 2020, 47, e2019GL085523. [Google Scholar] [CrossRef] [PubMed]
- Mousavi, S.M.; Ellsworth, W.L.; Zhu, W.; Chuang, L.Y.; Beroza, G.C. Earthquake transformer—An attentive deep-learning model for simultaneous earthquake detection and phase picking. Nat. Commun. 2020, 11, 3952. [Google Scholar] [CrossRef]
- Cembrano, J.; Hervé, F.; Lavenu, A. The Liquiñe Ofqui fault zone: A long-lived intra-arc fault system in southern Chile. Tectonophysics 1996, 259, 55–66. [Google Scholar] [CrossRef]
- Cembrano, J.; Lara, L. The link between volcanism and tectonics in the southern volcanic zone of the Chilean Andes: A review. Tectonophysics 2009, 471, 96–113. [Google Scholar] [CrossRef]
- Garcia, S.; Badi, G. Towards the development of the first permanent volcano observatory in Argentina. Volcanica 2021, 4, 21–48. [Google Scholar] [CrossRef]
- Tassi, F.; Vaselli, O.; Caselli, A.T. Copahue Volcano; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Montenegro, V.M.; Spagnotto, S.; Legrand, D.; Caselli, A.T. Seismic evidence of the active regional tectonic faults and the Copahue volcano, at Caviahue Caldera, Argentina. Bull. Volcanol. 2021, 83, 20. [Google Scholar] [CrossRef]
- Montenegro, V.M. Estudio Sismotectónico en la Caldera del Agrio. Ph.D. Thesis, Universidad Nacional de Córdoba, Córdoba, Argentina, 2019. [Google Scholar]
- Curilem, M.; Vergara, J.; Martin, C.S.; Fuentealba, G.; Cardona, C.; Huenupan, F.; Chacón, M.; Salman Khan, M.; Hussein, W.; Yoma, N.B. Pattern recognition applied to seismic signals of the Llaima volcano (Chile): An analysis of the events’ features. J. Volcanol. Geotherm. Res. 2014, 282, 134–147. [Google Scholar] [CrossRef]
- Smith, J.O. Introduction to Digital Filters: With Audio Applications; Stanford University: Stanford, CA, USA, 2007; Volume 2. [Google Scholar]
- Pérez, N.; Benítez, D.; Grijalva, F.; Lara-Cueva, R.; Ruiz, M.; Aguilar, J. ESeismic: Towards an Ecuadorian volcano seismic repository. J. Volcanol. Geotherm. Res. 2020, 396, 106855. [Google Scholar] [CrossRef]
- Choudhary, T.; Mishra, V.; Goswami, A.; Sarangapani, J. A comprehensive survey on model compression and acceleration. Artif. Intell. Rev. 2020, 53, 5113–5155. [Google Scholar] [CrossRef]
- Molina, R.S.; Morales, I.R.; Crespo, M.L.; Costa, V.G.; Carrato, S.; Ramponi, G. An End-to-End Workflow to Efficiently Compress and Deploy DNN Classifiers On SoC/FPGA. IEEE Embed. Syst. Lett. 2023; Early Access. [Google Scholar] [CrossRef]
- Coelho, C.N.; Kuusela, A.; Li, S.; Zhuang, H.; Ngadiuba, J.; Aarrestad, T.K.; Loncar, V.; Pierini, M.; Pol, A.A.; Summers, S. Automatic heterogeneous quantization of deep neural networks for low-latency inference on the edge for particle detectors. Nat. Mach. Intell. 2021, 3, 675–686. [Google Scholar] [CrossRef]
- AMD Inc. PYNQ; AMD Inc.: Santa Clara, CA, USA. Available online: http://www.pynq.io/ (accessed on 1 December 2023).
- Duarte, J.; Han, S.; Harris, P.; Jindariani, S.; Kreinar, E.; Kreis, B.; Ngadiuba, J.; Pierini, M.; Rivera, R.; Tran, N.; et al. Fast inference of deep neural networks in FPGAs for particle physics. J. Instrum. 2018, 13, P07027. [Google Scholar] [CrossRef]
- Beyreuther, M.; Barsch, R.; Krischer, L.; Megies, T.; Behr, Y.; Wassermann, J. ObsPy: A Python toolbox for seismology. Seismol. Res. Lett. 2010, 81, 530–533. [Google Scholar] [CrossRef]
- Renesas. Renesas ISL9238C. Available online: https://www.renesas.com/us/en/products/power-power-management/battery-management/multi-cell-battery-charging/isl9238c-buck-boost-narrow-vdc-battery-charger-smbus-interface-and-usb-otg (accessed on 1 October 2023).
- Molina, R.S.; Gil-Costa, V.; Crespo, M.L.; Ramponi, G. High-Level Synthesis Hardware Design for FPGA-Based Accelerators: Models, Methodologies, and Frameworks. IEEE Access 2022, 10, 90429–90455. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | |||
|---|---|---|---|
| Time domain | |||
| ft1 | Kurtosis | ft5 | Minimum |
| ft2 | RMS | ft6 | Maximum time |
| ft3 | Average | ft7 | Maximum |
| ft4 | Maximum | ft8 | Difference between maximum and minimum |
| ft9 | Difference between maximum and RMS | ||
| Frequency domain | |||
| ft10 | Maximum amplitude | ft14 | Maximum frequency value 20–30 Hz |
| ft11 | Maximum frequency | ft15 | RMS |
| ft12 | Average | ft16 | Difference between maximum and RMS |
| ft13 | Maximum frequency value 10–20 Hz | ft17 | Maximum |
| Scale domain | |||
| ft18 | Difference between maximum and minimum A6 | ft43 | Energy D3 |
| ft19 | Difference between maximum and minimum D6 | ft44 | Energy D2 |
| ft20 | Difference between maximum and minimum D5 | ft45 | Energy D1 |
| ft21 | Difference between maximum and minimum D4 | ft46 | Percentage of energy A6 |
| ft22 | Difference between maximum and minimum D3 | ft47 | Percentage of energy D6 |
| ft23 | Difference between maximum and minimum D2 | ft49 | Percentage of energy D6 |
| ft24 | Difference between maximum and minimum D1 | ft49 | Percentage of energy D4 |
| ft25 | RMS A6 | ft50 | Percentage of energy D3 |
| ft26 | RMS D6 | ft51 | Percentage of energy D2 |
| ft27 | RMS D5 | ft52 | Percentage of energy D1 |
| ft28 | RMS D4 | DFT after Wavelet transform | |
| ft29 | RMS D3 | ft53 | Maximum A6 |
| ft30 | RMS D2 | ft54 | Maximum D6 |
| ft31 | RMS D1 | ft55 | Maximum D5 |
| ft32 | Difference between maximum and RMS A6 | ft56 | Maximum D4 |
| ft33 | Difference between maximum and RMS D6 | ft57 | Maximum D3 |
| ft34 | Difference between maximum and RMS D5 | ft58 | Maximum D2 |
| ft35 | Difference between maximum and RMS D4 | ft59 | Maximum D1 |
| ft36 | Difference between maximum and RMS D3 | ft60 | Average A6 |
| ft37 | Difference between maximum and RMS D2 | ft61 | Average D6 |
| ft38 | Difference between maximum and RMS D1 | ft62 | Average D4 |
| ft39 | Total energy A6 | ft63 | Average D3 |
| ft40 | Energy D6 | ft64 | Average D2 |
| ft41 | Energy D5 | ft65 | Average D1 |
| MLP-F-C Model | Overall System | |||||
|---|---|---|---|---|---|---|
| Resource Utilization [%] | Latency [ms] | Power [W] | Latency [ms] | |||
| BRAM | DSP | FF | LUT | |||
| 0 | 2 | 2 | 5 | 0.00025 | 1.5 | 140 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sosa, Y.M.; Molina, R.S.; Spagnotto, S.; Melchor, I.; Nuñez Manquez, A.; Crespo, M.L.; Ramponi, G.; Petrino, R. Seismic Event Detection in the Copahue Volcano Based on Machine Learning: Towards an On-the-Edge Implementation. Electronics 2024, 13, 622. https://doi.org/10.3390/electronics13030622
Sosa YM, Molina RS, Spagnotto S, Melchor I, Nuñez Manquez A, Crespo ML, Ramponi G, Petrino R. Seismic Event Detection in the Copahue Volcano Based on Machine Learning: Towards an On-the-Edge Implementation. Electronics. 2024; 13(3):622. https://doi.org/10.3390/electronics13030622
Chicago/Turabian StyleSosa, Yair Mauad, Romina Soledad Molina, Silvana Spagnotto, Iván Melchor, Alejandro Nuñez Manquez, Maria Liz Crespo, Giovanni Ramponi, and Ricardo Petrino. 2024. "Seismic Event Detection in the Copahue Volcano Based on Machine Learning: Towards an On-the-Edge Implementation" Electronics 13, no. 3: 622. https://doi.org/10.3390/electronics13030622
APA StyleSosa, Y. M., Molina, R. S., Spagnotto, S., Melchor, I., Nuñez Manquez, A., Crespo, M. L., Ramponi, G., & Petrino, R. (2024). Seismic Event Detection in the Copahue Volcano Based on Machine Learning: Towards an On-the-Edge Implementation. Electronics, 13(3), 622. https://doi.org/10.3390/electronics13030622