
RFID-Based Localization System for Monitoring the Dispersal of Oak Acorns



Abstract
1. Introduction
1.1. RFID Techniques in Wildlife Tracking
1.2. Radio-Tracking Techniques in Acorn Dispersal
1.3. Our Motivations and Contributions
2. Materials and Methods
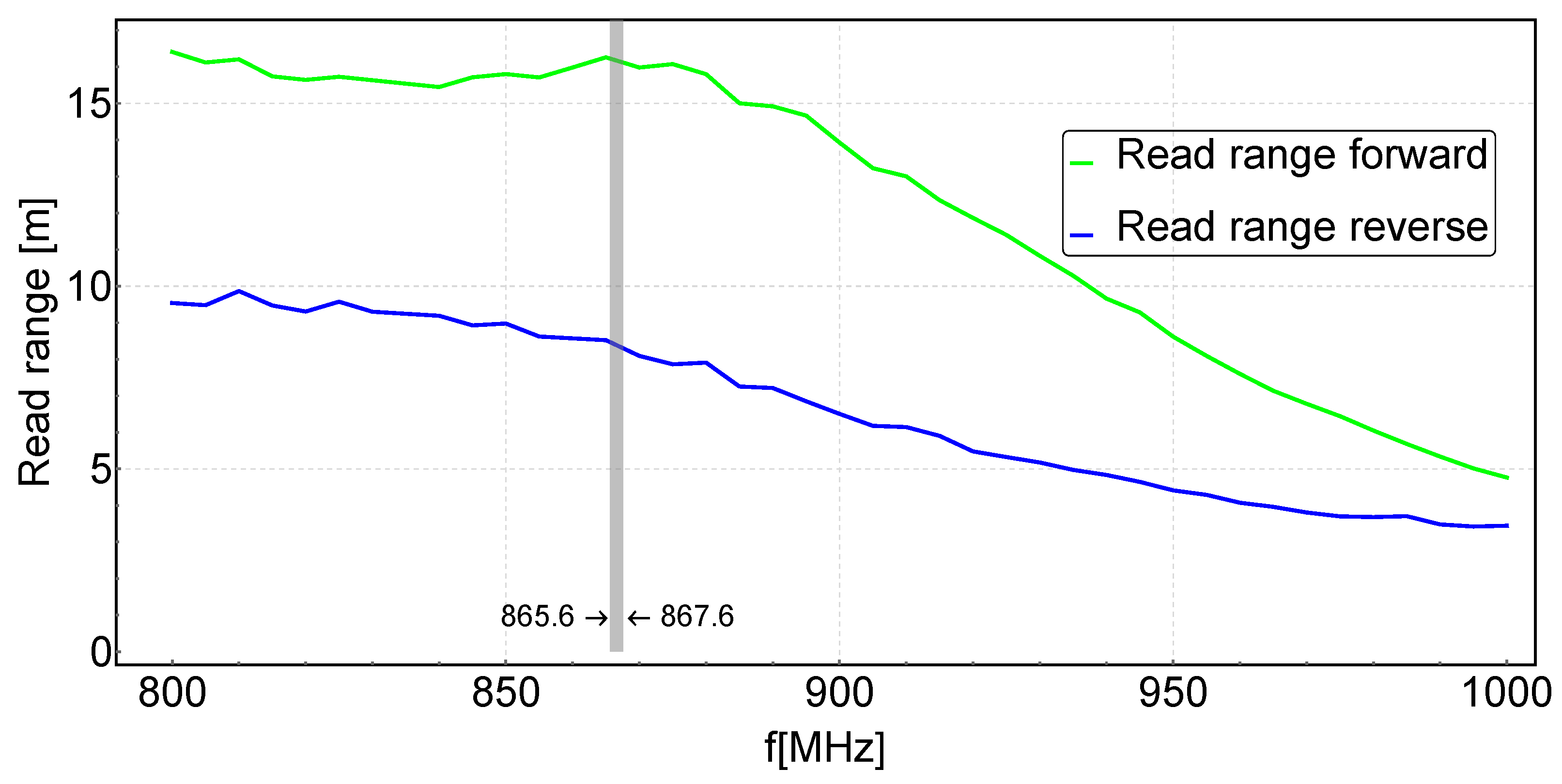
2.1. Determining the Operation Range of the RFID System
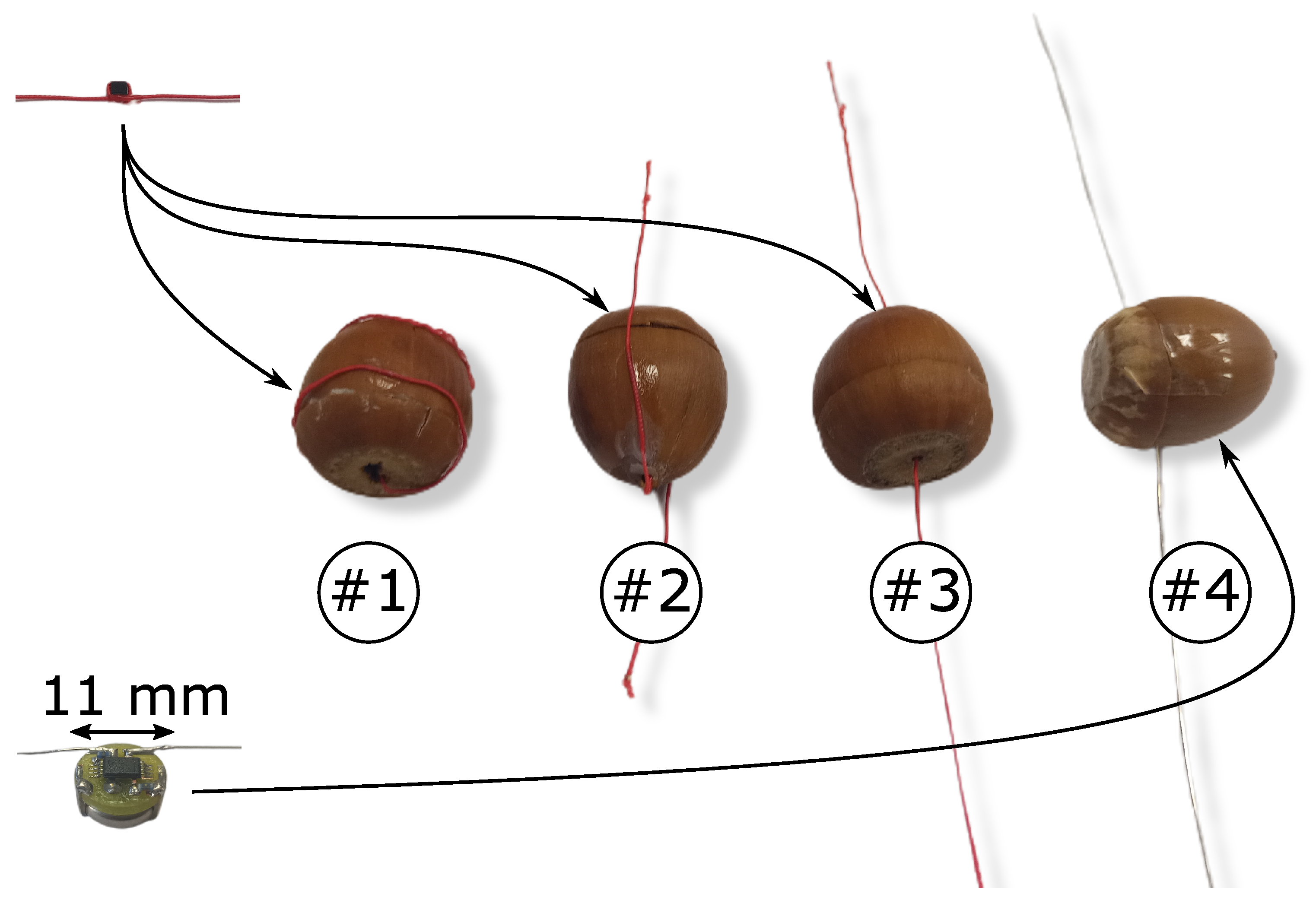
2.2. Selection of RFID Tags for Experimental Studies
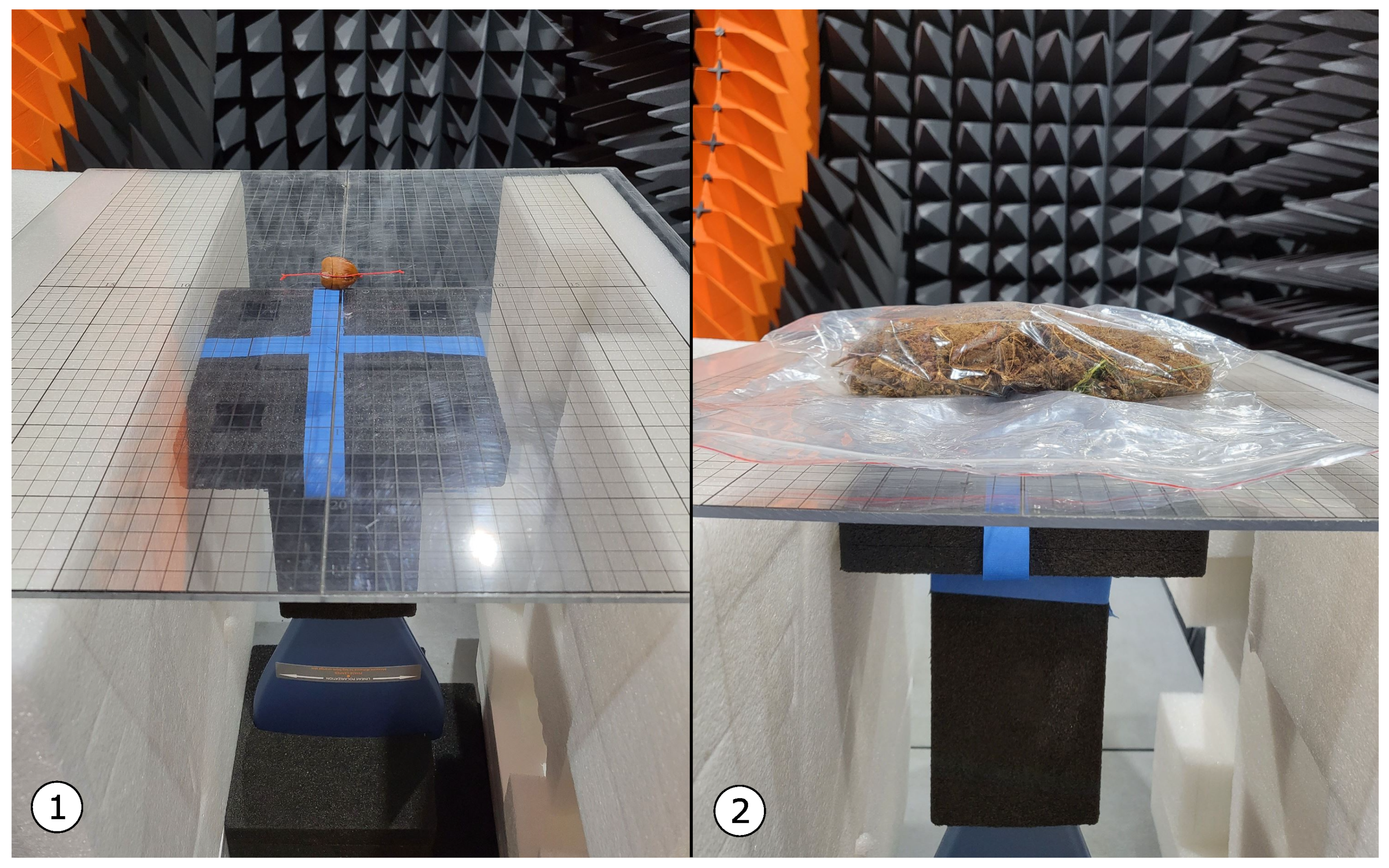
2.3. Laboratory Experimental Set-Up
2.4. Experimental Set-Up under Quasi-Real Conditions
3. Results
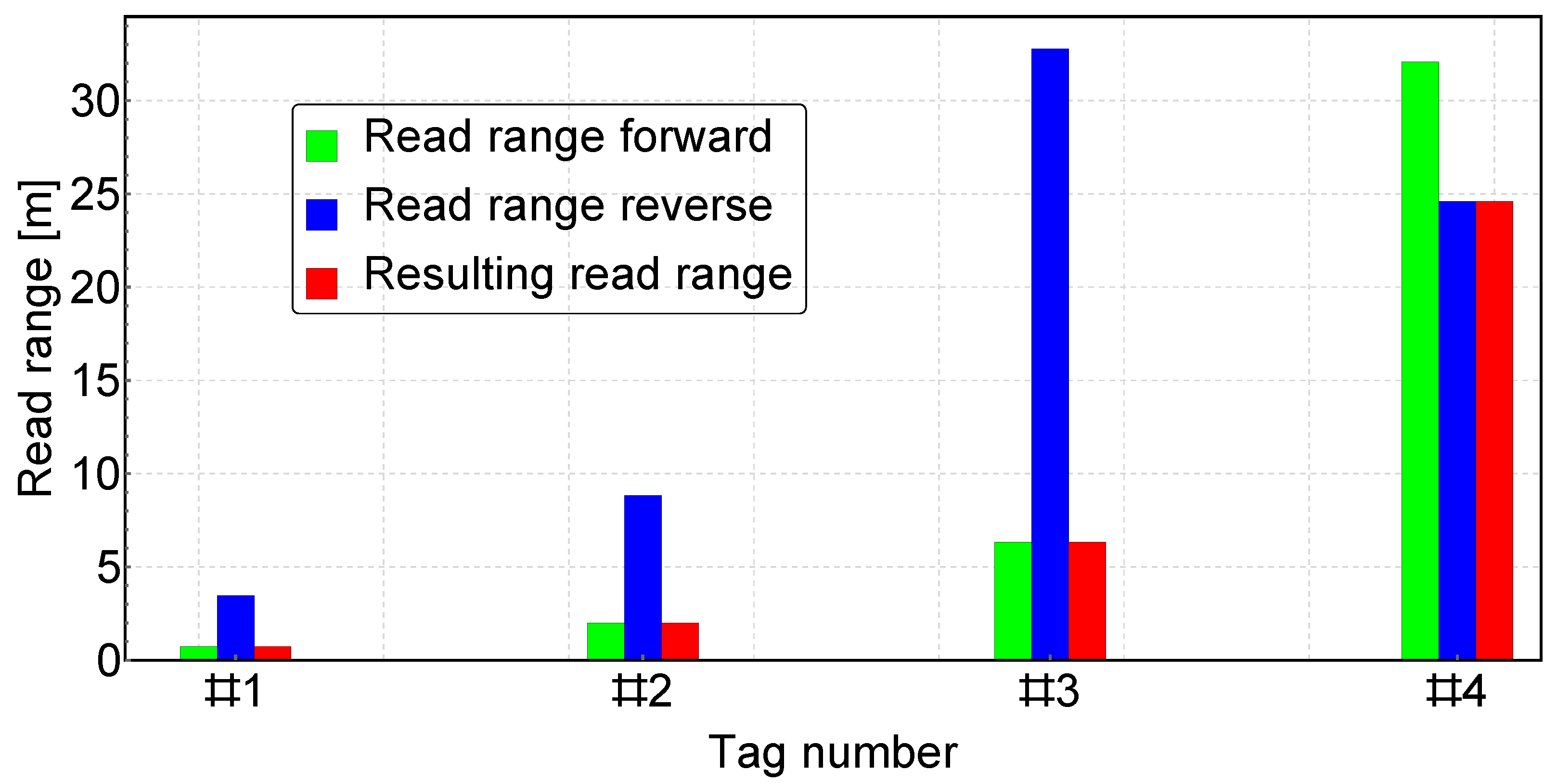
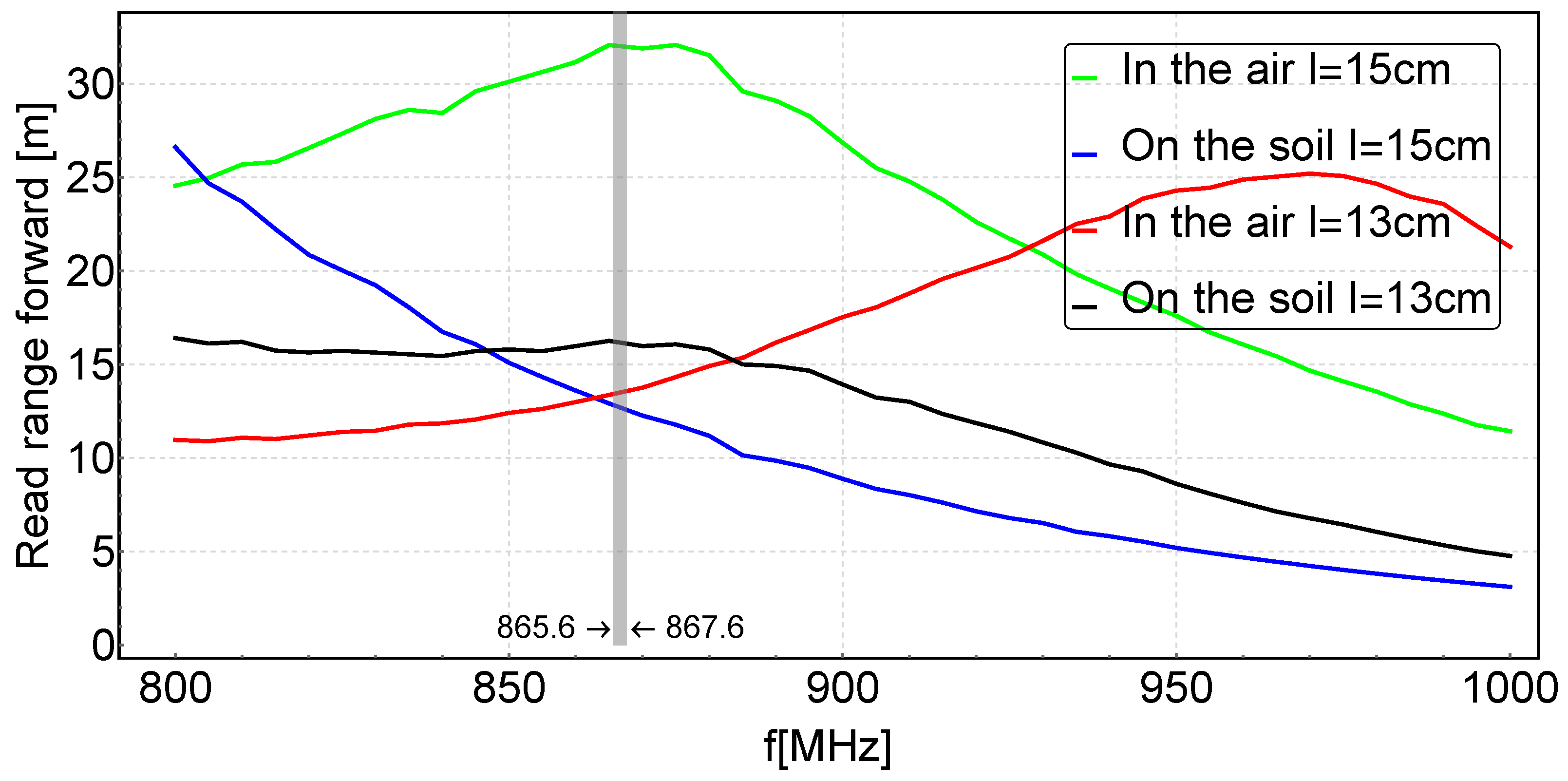
3.1. Laboratory Experimental Results
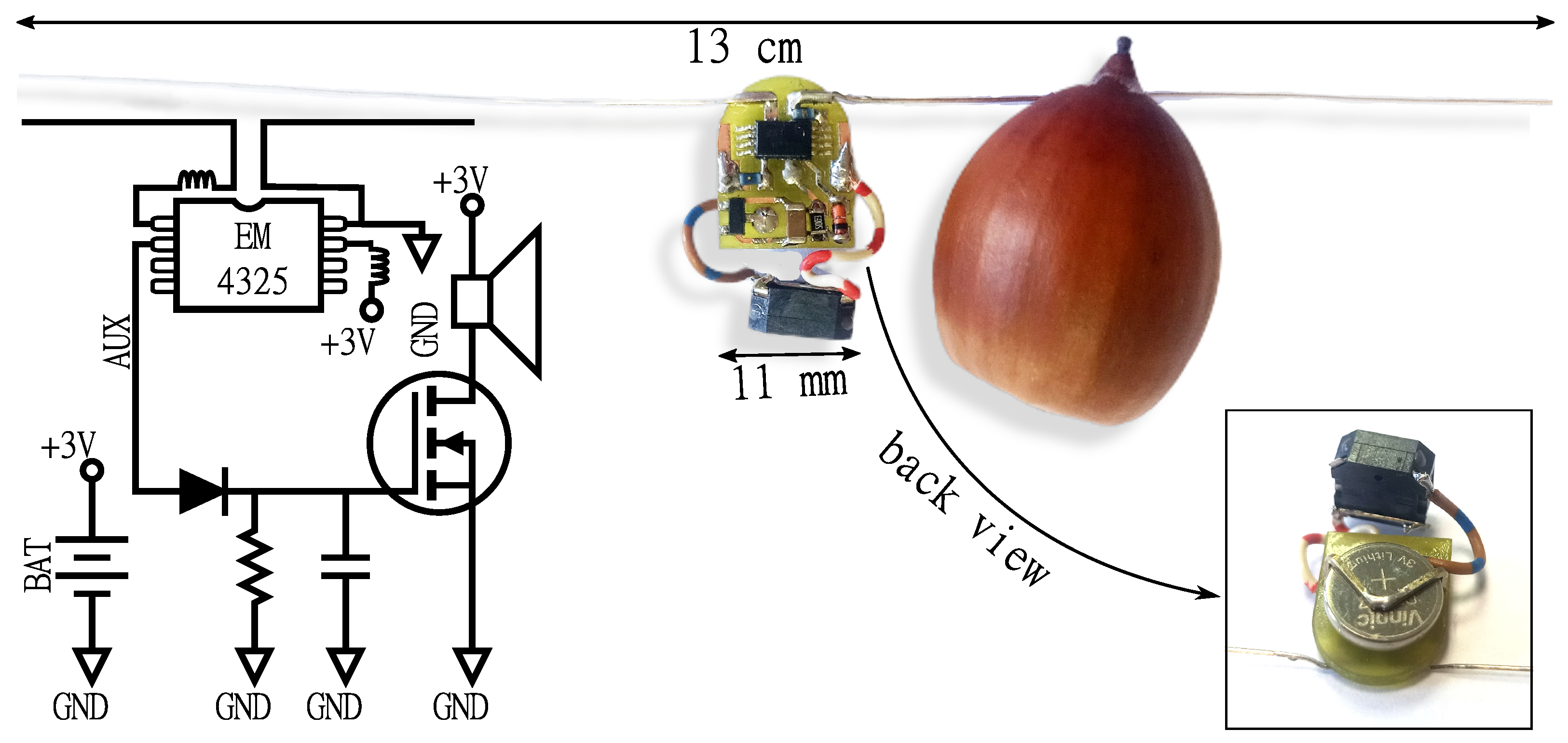
Conclusions from Laboratory Experiments—RFID Tag Concept with Sound Indicator
3.2. Experimental Results under Quasi-Real Conditions
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cochran, W.W.; Lord, R.D., Jr. A radio-tracking system for wild animals. J. Wildl. Manag. 1963, 27, 9–24. [Google Scholar] [CrossRef]
- Lahoz-Monfort, J.J.; Magrath, M.J. A comprehensive overview of technologies for species and habitat monitoring and conservation. BioScience 2021, 71, 1038–1062. [Google Scholar] [CrossRef]
- Thomas, B.; Holland, J.D.; Minot, E.O. Wildlife tracking technology options and cost considerations. Wildl. Res. 2011, 38, 653–663. [Google Scholar] [CrossRef]
- Singh, J.; Bais, B. Wildlife tracking with latest electronic technology. Int. J. Avian Wildl. Biol. 2018, 3, 238–240. [Google Scholar]
- Hofman, M.P.; Hayward, M.W.; Heim, M.; Marchand, P.; Rolandsen, C.M.; Mattisson, J.; Urbano, F.; Heurich, M.; Mysterud, A.; Melzheimer, J.; et al. Right on track? Performance of satellite telemetry in terrestrial wildlife research. PLoS ONE 2019, 14, e0216223. [Google Scholar] [CrossRef] [PubMed]
- Chabot, D.; Bird, D.M. Wildlife research and management methods in the 21st century: Where do unmanned aircraft fit in? J. Unmanned Veh. Syst. 2015, 3, 137–155. [Google Scholar] [CrossRef]
- Mesquita, G.P.; Mulero-Pázmány, M.; Wich, S.A.; Rodríguez-Teijeiro, J.D. A practical approach with drones, smartphones, and tracking tags for potential real-time animal tracking. Curr. Zool. 2023, 69, 208–214. [Google Scholar] [CrossRef] [PubMed]
- Desrochers, A.; Tremblay, J.A.; Aubry, Y.; Chabot, D.; Pace, P.; Bird, D.M. Estimating wildlife tag location errors from a VHF receiver mounted on a drone. Drones 2018, 2, 44. [Google Scholar] [CrossRef]
- Gottwald, J.; Zeidler, R.; Friess, N.; Ludwig, M.; Reudenbach, C.; Nauss, T. Introduction of an automatic and open-source radio-tracking system for small animals. Methods Ecol. Evol. 2019, 10, 2163–2172. [Google Scholar] [CrossRef]
- Finkenzeller, K. RFID Handbook: Fundamentals and Applications in Contactless Smart Cards, Radio Frequency Identification and Near-Field Communication; John wiley & Sons: New York, NY, USA, 2010. [Google Scholar]
- Chetouane, F. An overview on RFID technology instruction and application. IFAC-PapersOnLine 2015, 48, 382–387. [Google Scholar] [CrossRef]
- Floyd, R.E. RFID in animal-tracking applications. IEEE Potentials 2015, 34, 32–33. [Google Scholar] [CrossRef]
- Habedank, A.; Urmersbach, B.; Kahnau, P.; Lewejohann, L. O mouse, where art thou? The Mouse Position Surveillance System (MoPSS)—An RFID-based tracking system. Behav. Res. Methods 2022, 54, 676–689. [Google Scholar] [CrossRef]
- Ross, R.; Anderson, B.; Bienvenu, B.; Scicluna, E.L.; Robert, K.A. WildTrack: An IoT System for Tracking Passive-RFID Microchipped Wildlife for Ecology Research. Automation 2022, 3, 426–438. [Google Scholar] [CrossRef]
- Briggs, A.J.; Robstad, C.A.; Rosell, F. Using radio-frequency identification technology to monitor Eurasian beavers. Wildl. Soc. Bull. 2021, 45, 154–161. [Google Scholar] [CrossRef]
- Dyo, V.; Ellwood, S.A.; Macdonald, D.W.; Markham, A.; Trigoni, N.; Wohlers, R.; Mascolo, C.; Pásztor, B.; Scellato, S.; Yousef, K. WILDSENSING: Design and deployment of a sustainable sensor network for wildlife monitoring. ACM Trans. Sens. Netw. (TOSN) 2012, 8, 1–33. [Google Scholar] [CrossRef]
- Rafiq, K.; Appleby, R.G.; Edgar, J.P.; Radford, C.; Smith, B.P.; Jordan, N.R.; Dexter, C.E.; Jones, D.N.; Blacker, A.R.; Cochrane, M. WildWID: An open-source active RFID system for wildlife research. Methods Ecol. Evol. 2021, 12, 1580–1587. [Google Scholar] [CrossRef]
- Gómez, J.M.; Schupp, E.W.; Jordano, P. Synzoochory: The ecological and evolutionary relevance of a dual interaction. Biol. Rev. 2019, 94, 874–902. [Google Scholar] [CrossRef] [PubMed]
- Bossema, I. Jays and oaks: An eco-ethological study of a symbiosis. Behaviour 1979, 70, 1–116. [Google Scholar] [CrossRef]
- Bobiec, A.; Reif, A.; Öllerer, K. Seeing the oakscape beyond the forest: A landscape approach to the oak regeneration in Europe. Landsc. Ecol. 2018, 33, 513–528. [Google Scholar] [CrossRef]
- Pons, J.; Pausas, J.G. Acorn dispersal estimated by radio-tracking. Oecologia 2007, 153, 903–911. [Google Scholar] [CrossRef]
- Kurek, P.; Dobrowolska, D.; Wiatrowska, B. Dispersal distance and burial mode of acorns in Eurasian Jays Garrulus glandarius in European temperate forests. Acta Ornithol. 2019, 53, 155–162. [Google Scholar] [CrossRef]
- Wróbel, A.; Kurek, P.; Bogdziewicz, M.; Dobrowolska, D.; Zwolak, R. Avian dispersal of an invasive oak is modulated by acorn traits and the presence of a native oak. For. Ecol. Manag. 2022, 505, 119866. [Google Scholar] [CrossRef]
- Commission Implementing Decision (EU) 2019/1345 of 2 August 2019 Amending Decision 2006/771/EC Updating Harmonised Technical Conditions in the Area of Radio Spectrum Use for Short-Range Devices (Notified under Document C (2019) 5660) (Text with EEA Relevance). 2019. Available online: http://data.europa.eu/eli/dec_impl/2019/1345/oj (accessed on 8 December 2023).
- Jankowski-Mihułowicz, P.; Węglarski, M.; Chamera, M.; Pyt, P. Textronic UHF RFID Transponder. Sensors 2021, 21, 1093. [Google Scholar] [CrossRef] [PubMed]
- Balanis, C.A. Antenna Theory: Analysis and Design; John Wiley & Sons: New York, NY, USA, 2016. [Google Scholar]
- European Telecommunications Standards Institute. Radio Frequency Identification Equipment Operating in the Band 865 MHz to 868 MHz with Power Levels up to 2 W and in the Band 915 MHz to 921 MHz with Power Levels up to 4 W; Harmonised Standard for Access to Radio Spectrum; European Telecommunications Standards Institute: Valbonne, France, 2020. [Google Scholar]
- Voyantic. Tagformance, RAIN RFID and NFC Testing and Measurement System for Research & Development; Ver.Q3; Voyantic: Helsinki, Finland, 2023. [Google Scholar]
- Impinj, Inc. IMPINJ MONZA R6-P; Ver.7.0; Impinj, Inc.: Seattle, WA, USA, 2021. [Google Scholar]
- EM Microelectronic-Marin SA. EM4325; Ver.9.0; EM Microelectronic: Marin, Switzerland, 2017. [Google Scholar]
- Aaronia AG. Hyperlog®. Logper Antennas. 70 Series; Ver.6.0; Aaronia AG: Strickscheid, Germany, 2023. [Google Scholar]
- Zebra Technologies Corp. RFD90 Ultra-Rugged Uhf Rfid Sleds; Zebra Technologies Corp: Lincolnshire, IL, USA, 2022. [Google Scholar]
- Mohammed, N.A.; Sivakumar, M.; Deavours, D.D. An RFID tag capable of free-space and on-metal operation. In Proceedings of the 2009 IEEE Radio and Wireless Symposium, San Diego, CA, USA, 18–22 January 2009; pp. 63–66. [Google Scholar]
- Sidén, J.; Nilsson, H.E. RFID Antennas–Possibilities and Limitations. Radio Freq. Identif. Fundam. Appl. Des. Methods Solut. 2010, 5, 324. [Google Scholar]
- Solar, H.; Beriain, A.; Rezola, A.; Del Rio, D.; Berenguer, R. A 22-m Operation Range Semi-Passive UHF RFID Sensor Tag with Flexible Thermoelectric Energy Harvester. IEEE Sens. J. 2022, 22, 19797–19808. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reader-Tag Orientation Angle | Sound Indication Range | Reader Indication Range |
|---|---|---|
| [°] | [m] | [m] |
| 90 | 13.86 | 7.77 |
| 80 | 12.63 | 7.70 |
| 70 | 12.50 | 7.63 |
| 60 | 11.57 | 7.52 |
| 50 | 9.50 | 6.66 |
| 40 | 8.70 | 6.52 |
| 30 | 7.90 | 4.23 |
| 20 | 5.25 | 3.21 |
| 10 | 4.30 | 2.16 |
| 0 | 4.30 | 1.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ciężkowski, M.; Jankowski-Mihułowicz, P.; Skrobacz, K. RFID-Based Localization System for Monitoring the Dispersal of Oak Acorns. Electronics 2024, 13, 567. https://doi.org/10.3390/electronics13030567
Ciężkowski M, Jankowski-Mihułowicz P, Skrobacz K. RFID-Based Localization System for Monitoring the Dispersal of Oak Acorns. Electronics. 2024; 13(3):567. https://doi.org/10.3390/electronics13030567
Chicago/Turabian StyleCiężkowski, Maciej, Piotr Jankowski-Mihułowicz, and Kacper Skrobacz. 2024. "RFID-Based Localization System for Monitoring the Dispersal of Oak Acorns" Electronics 13, no. 3: 567. https://doi.org/10.3390/electronics13030567
APA StyleCiężkowski, M., Jankowski-Mihułowicz, P., & Skrobacz, K. (2024). RFID-Based Localization System for Monitoring the Dispersal of Oak Acorns. Electronics, 13(3), 567. https://doi.org/10.3390/electronics13030567