2.1. Signal Model of Rotor Targets
The blade echo mainly depends on the scattering coefficient, number, and position of scattering points, and the number and position of scattering points can be transformed into the distribution of scattering points on the blade. Considering the value and distribution of scattering coefficients for all scattering points, they can be mainly divided into the following four types: first, the scattering coefficient value is consistent and the scattering points are evenly spaced; second, the scattering coefficient value is consistent but the scattering point spacing is non-uniform; third, the scattering points are evenly spaced but the scattering coefficient value is not constant; fourth, both the scattering coefficient value and the scattering point spacing are non-uniform. The latter three types are non-uniform scattering, which poses significant difficulties in research and is still being studied by scholars. In this paper, the first type is defined as uniform scattering, which is the main method for constructing blade echo models. To some extent, this ignores the complexity of the target and can simplify the analysis and generate blade echo models. If the micromotion target is equivalent to several strong scattering points, it is a specific special case of the scattering point model. This model is commonly used in micromotion research for micromotion targets such as ballistic missiles and space debris.
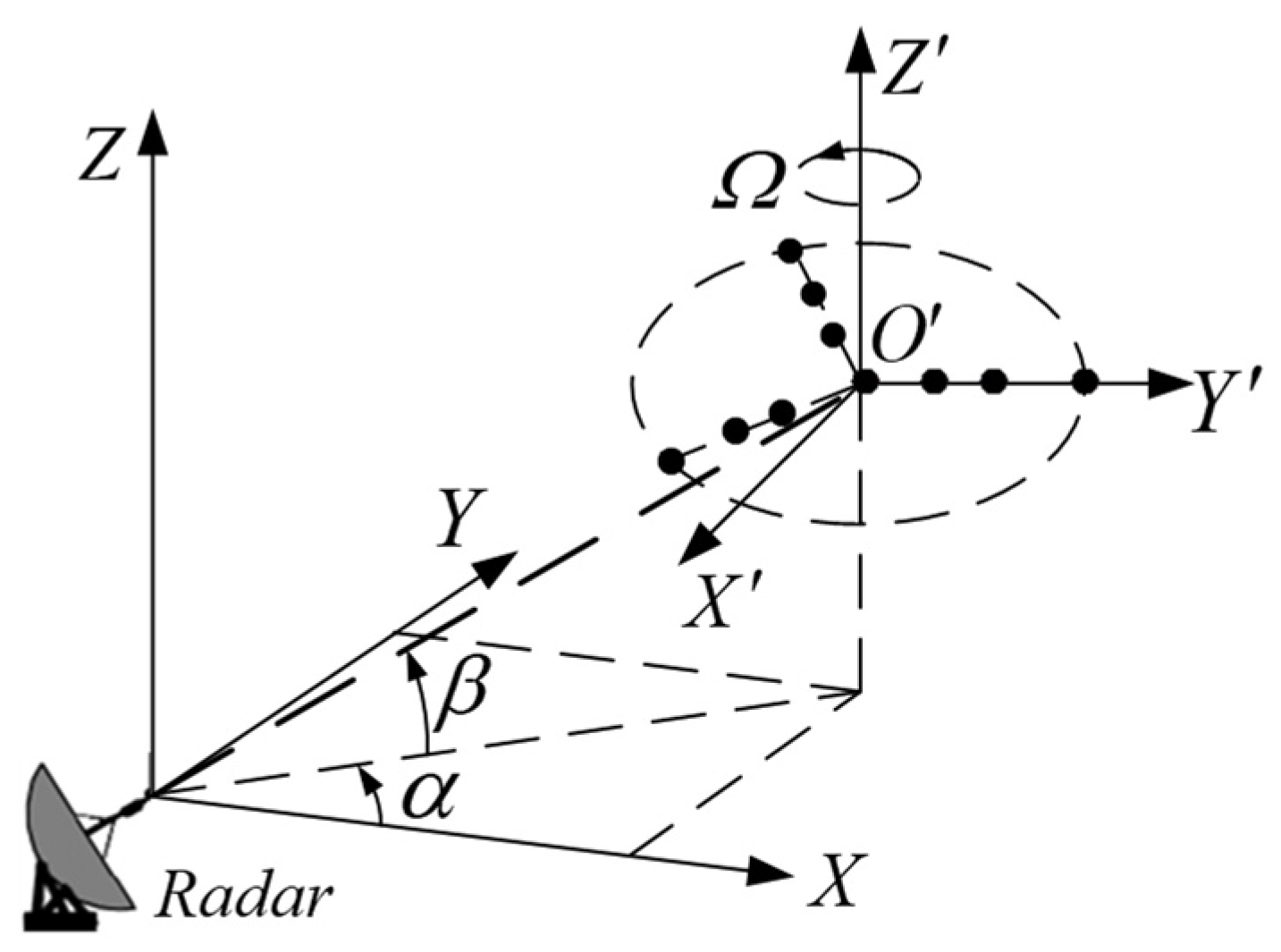
Figure 1 depicts the geometric correlation between the radar and the dispersion of the target’s three rotor blades. According to [
1], the baseband echo of the scattering point
when a radar signal is transmitted at a wavelength of
is as follows:
Equation (1) delineates the various components of the echo: the pitch angle , the rotor rotation frequency , the distance (, is the blade length), the initial rotation angle between the scattering point and the rotor center, and the backscattering coefficient . According to Equation (1), the signal of a single scattering point can be decomposed into two distinct components: the amplitude part and the phase part.
The amplitude part is constant for a single scattering point, while the phase part is modulo 1, which does not affect the signal amplitude. The derivative of the phase of a single scattering point, which represents the instantaneous Doppler frequency of the signal emitted by that point, is illustrated in Equation (2) as follows:
However, it is crucial to recognize that interference occurs among these scattering points due to a correlation between the scattering locations of the blades. The interference causes alterations to be incorporated into the echo’s amplitude and phase. In order to examine the influence of multiple scattering point superpositions on the phase component of the echo, the phase component’s instantaneous Doppler frequency of time is calculated. Additionally, Equation (3) calculates the phase component’s derivative as follows:
Upon performing the derivative, one may discover the presence of a term A
that remains unaffected by the frequency at a single scattering point when the modulus is set to 1. Nevertheless, superimposing the phase component of the scattering points will impact the signal’s instantaneous Doppler frequency. Assuming a single blade has
strong scattering centers, the single-blade echo can be expressed as follows:
Equation (4) states that the scattering coefficient, number, and position of scattering points primarily determine the blade echo. The number and position of scattering points can be converted into the distribution of scattering points on the blade. As follows, Equation (5) illustrates the decomposition of the blade echo into amplitude and phase components, assuming that the scattering coefficients of all scattering points on a single blade are identical and distributed uniformly:
Equation (5) establishes a correlation among all scattering points. The phase of each scattered point echo is separately modeled and added to 1, and the sum is modeled differently than 1. The phase parts impact each other, and it can be determined that the phase and amplitude parts have changed. Therefore, the phase and amplitude parts were replaced with parts A and B to represent them. At this time, it is possible to examine the effect of each dispersal point on the signal by deriving the formula theoretically.
2.2. Mechanism Analysis of the Flash Phenomenon in Rotor Targets
This paper analyzes the rotor targets’ flash phenomenon in two scenarios.
Scenario 1:
When
,
,
and an equal ratio relationship exists between the phase components of each scattering point, as demonstrated by Equation (6), the signal may transform.
The phase part influences the amplitude part of the echo, which has current phase and amplitude variations. Presently, the signal amplitude component is the following:
Equation (8), which represents the signal amplitude modulated by a
function and multiplied by the number of scattering points, illustrates this process. In addition to converting the phase component, the Singer function modulates it. The phase component can be subdivided into two components in the time domain, constituting a product relationship. Convolution is executed on the phase derivatives of the two components comprising the phase part to obtain the results of the signal in the frequency domain, thereby converting them to the frequency domain. Equations (8) and (9) represent the consequences of the two components in the time domain, as follows:
Regarding the component
, the instantaneous Doppler frequency of the signal is affected by the denominator
in
solely when
. At times, it simply exhibits frequency domain broadening (or compression); the phase derivative of the two individual component elements [
8] in the alignment represents the instantaneous Doppler frequency in
, and the phase derivative can be directly deduced in
. The instantaneous Doppler frequency results obtained from the differentiation of the two components are depicted in Equations (10) and (11) as follows:
We converge the instantaneous Doppler frequencies of the two components at this time as follows:
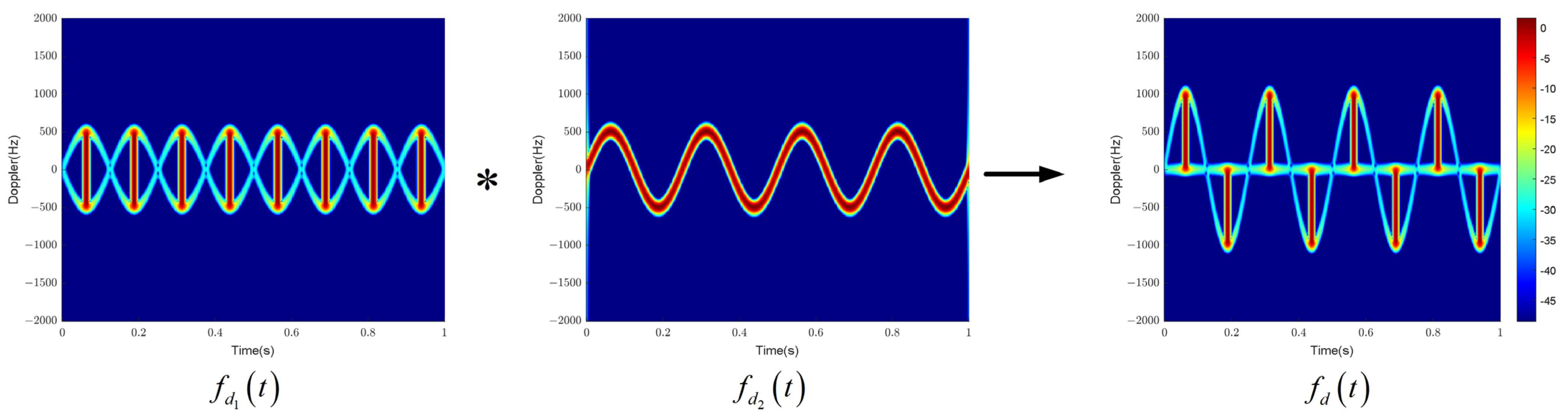
Equation (12) indicates that the frequency domain will contain two distinct frequency components, one of which is time-modulated and the other of which is a constant frequency with a value of zero. It will manifest in the time–frequency domain as a time-modulated sine curve (sine-modulated component) with amplitude and a direct current line with zero frequency (DC component).
Scenario 2:
When
,
,
, integrating the echo of all scattering points is impossible. The phase term remains constant and does not influence the amplitude of the signal when only this instant is considered. The current value of the amplitude of the blade echo is as follows:
At this time, the amplitude of the blade echo is determined by the number of scattering points, while its Doppler frequency value is given by the following:
The frequency of scattering points on the blade is , represented in the frequency domain by scattering points that are equally spaced and have identical intensities. It appears to be in the frequency band of the range as the scattering point interval approaches zero; this phenomenon is known as the time–frequency domain flash.
In the following two scenarios, it is established that the amplitude component of the blade echo can be consistently denoted as follows:
Equation (16) shows that the blade echo exhibits an instantaneous Doppler frequency value as follows:
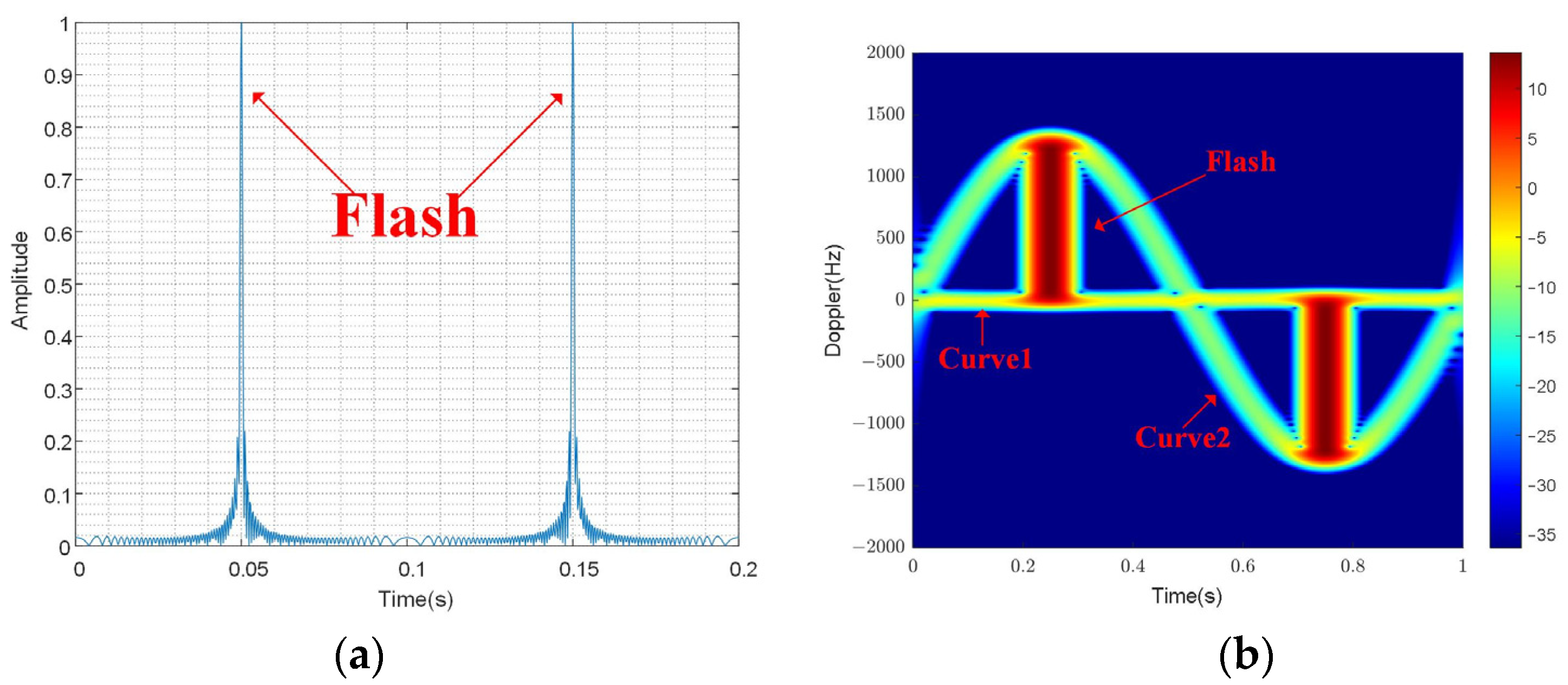
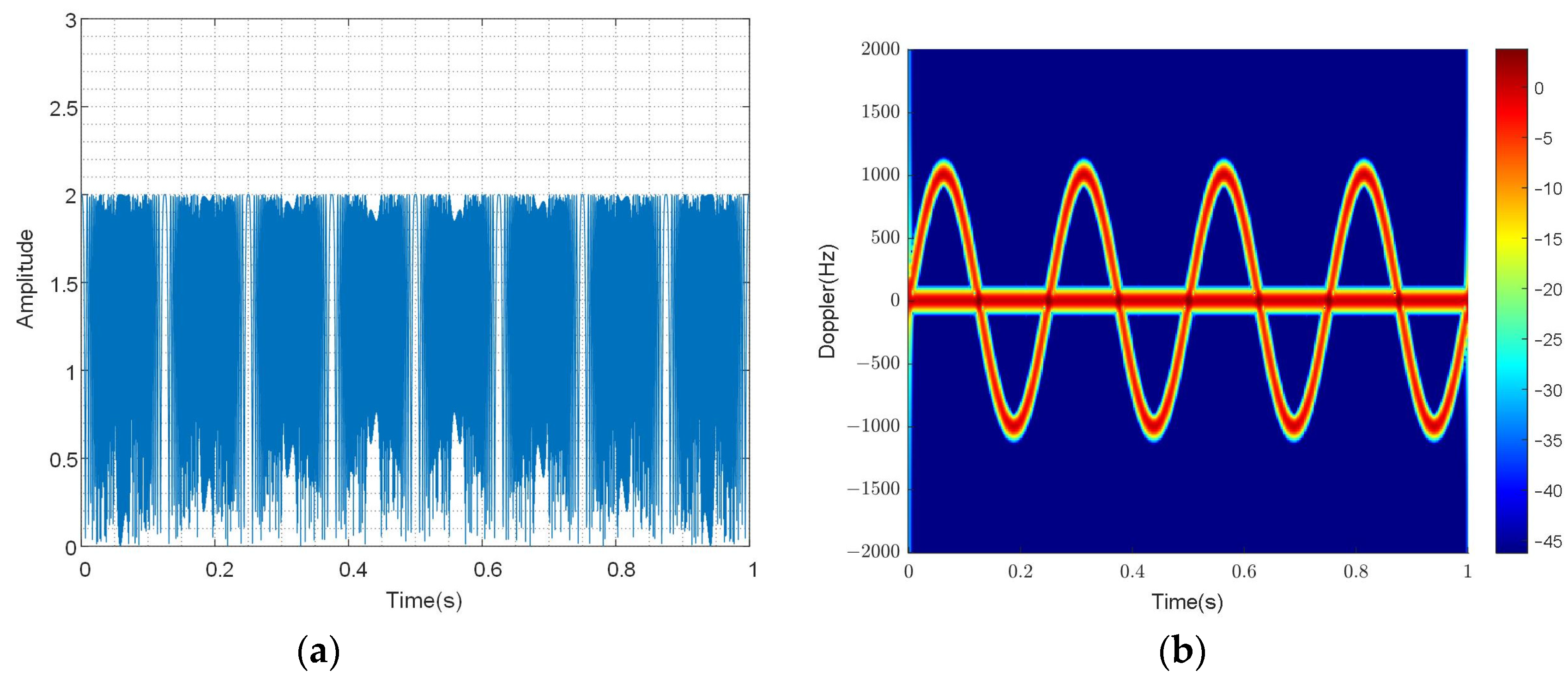
Figure 2 illustrates the time-domain and time–frequency results of the echo. As predicted by the theoretical analysis, the amplitude modulation caused by a
function is consistent with the results in
Figure 2. The time–frequency result, which is obtained by taking the derivative of the phase component, illustrates the relationship between time and frequency. Two curves are presented in the time–frequency results: a sine curve with the amplitude at
and a straight line representing the zero-frequency DC component. Simultaneously, when time-domain flash occurs, the frequency band
manifests in the time–frequency domain, known as the flash phenomenon in rotor targets.
In
Figure 2, the amplitude in the time domain is modulated by the
function, consistent with the theoretical analysis results. The time–frequency results are obtained by short-time Fourier transform (STFT). Short-time Fourier transform (STFT) is usually used to study the time–frequency characteristics of the target echo. This time–frequency transform method is the most direct way to study the time-varying characteristics of signal frequency. This time–frequency transformation method divides the signal into several overlapping blocks, each with its window length, and applies the Fourier transform to the data in each block. This transformation reflects the time–frequency characteristics of the signal frequency. However, its limitation lies in the “window effect” of the transformation, which means that the transformed signal cannot have both high time and high-frequency resolution simultaneously. The choice of window length determines the time resolution and frequency resolution. The longer the window length, the higher the frequency resolution and the lower the time resolution. The shorter the window length, the lower the frequency resolution and the higher the time resolution.
In Equation (17),
represents the signal, and
represents the Gaussian window function. In this study, STFT with an appropriate window length 8 achieves suitable time and frequency resolution [
19].
The window function is crucial in the short-time Fourier transform (STFT). Equation (18) shows the Gaussian window function used in this paper.
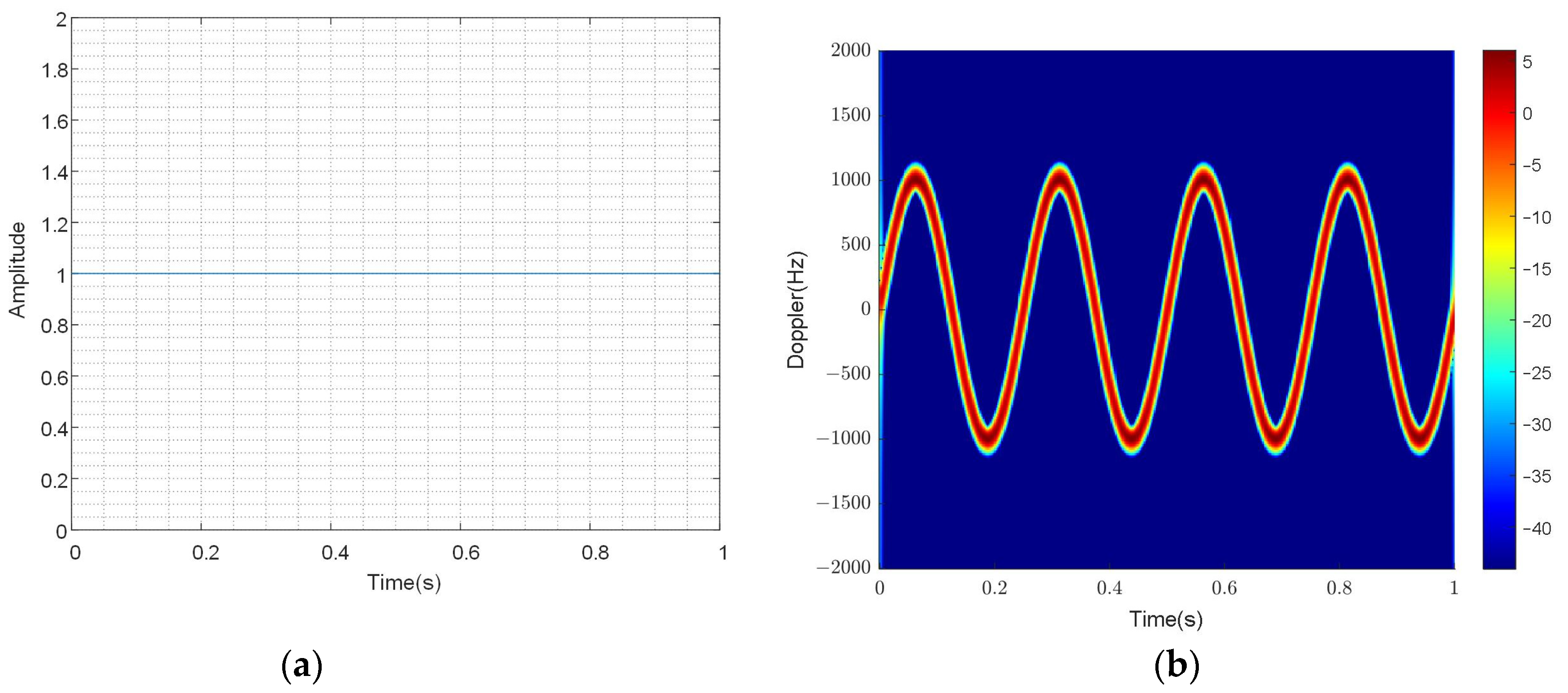
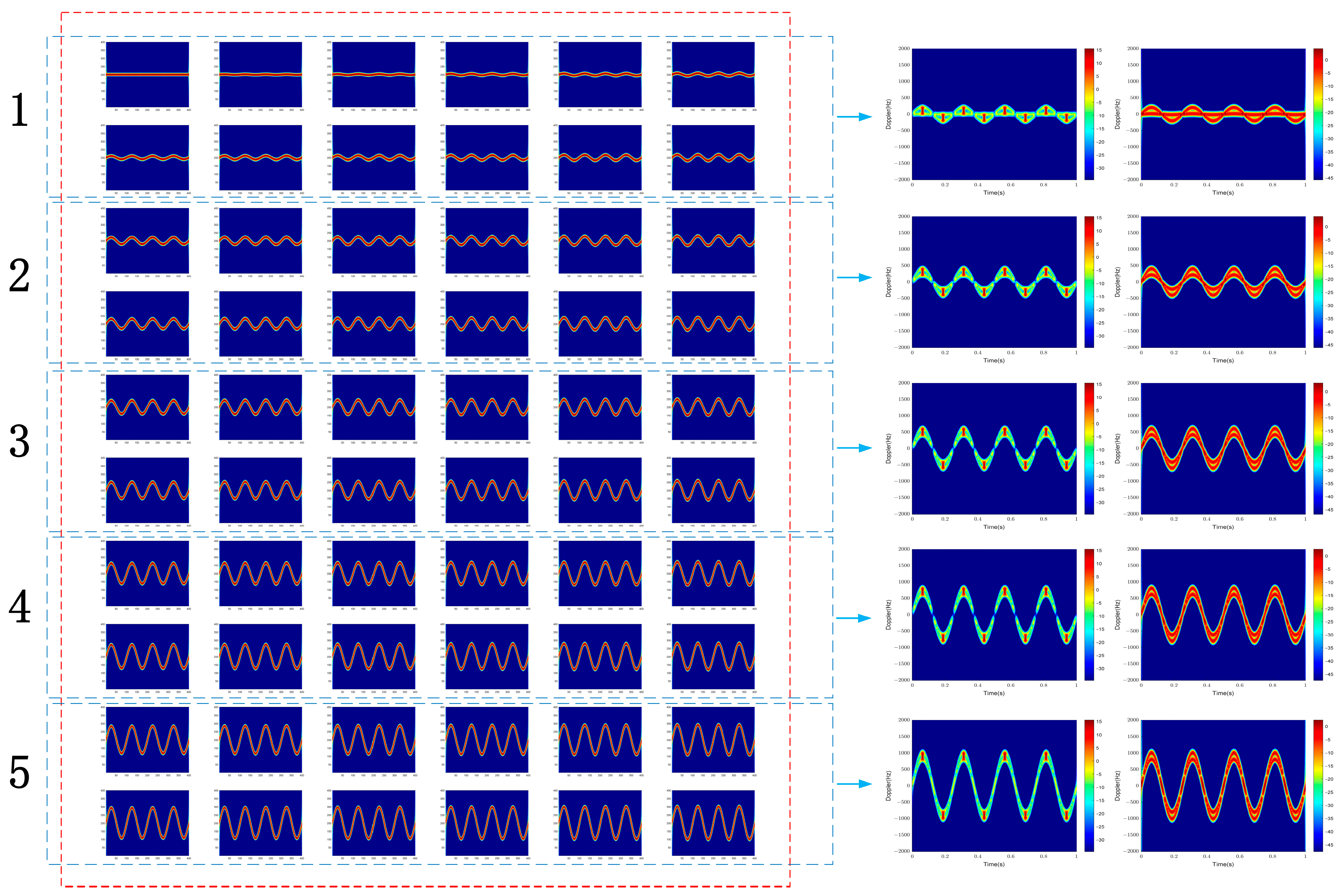
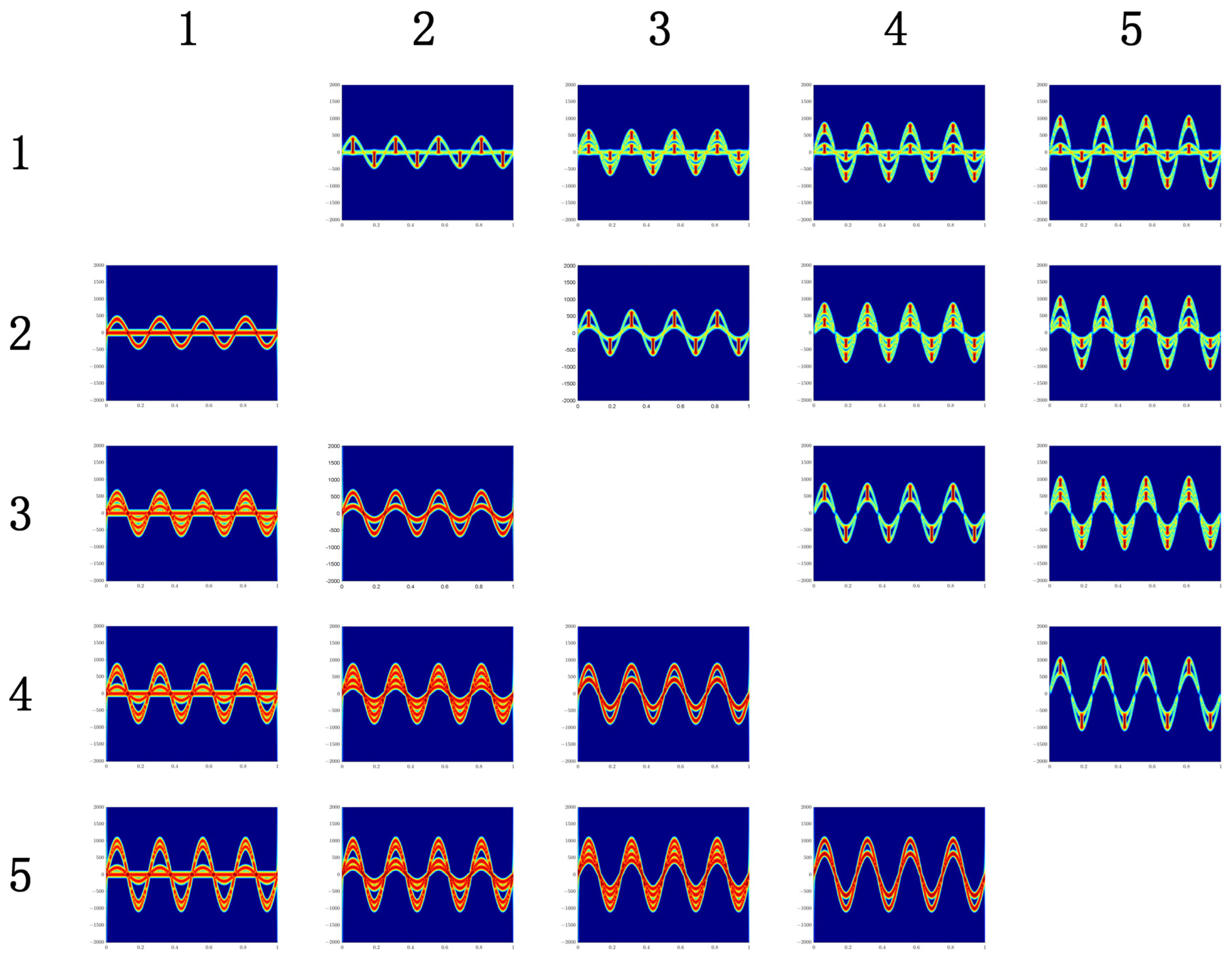
The time–frequency results reflect the relationship between frequency and time, that is, the result of taking the derivative of the phase part. In the time–frequency results, there are two curves, one is a sine curve, and the other is a straight line of the zero-frequency DC component. At the same time, when flash occurs in the time domain, a frequency band also appears in the time–frequency domain, which is called time–frequency domain flash. At this point, there are two curves, a sine curve with an amplitude of and a sine curve with an amplitude of 0. Due to the frequency being 0, it is easy to ignore when analyzing instantaneous Doppler. Therefore, further theoretical derivation is carried out, assuming that the length of the blade is , is the distance from the outermost scattering point to the center of rotation of the blade, and is the distance from the innermost scattering point to the center of rotation of the blade. The innermost scattering point is not at the origin, which can avoid the case of a frequency of 0. Currently, scenario 2 is divided into scenario 2.1 and scenario 2.2.
Scenario 2.1: When
,
, the number of scattering points decreases compared to the number of scattering points starting from the origin. At this point, let the number of scattering points be K, and the amplitude of the blade echo is the following:
At this moment, the instantaneous Doppler frequency value of the blade echo is the following:
In the frequency domain, the frequency of scattering point
on the blade is as follows:
where it is manifested as equally spaced scattering points with the same intensity. When
approaches 0, it appears to be within the frequency band of
, and the flash range in the time–frequency domain changes.
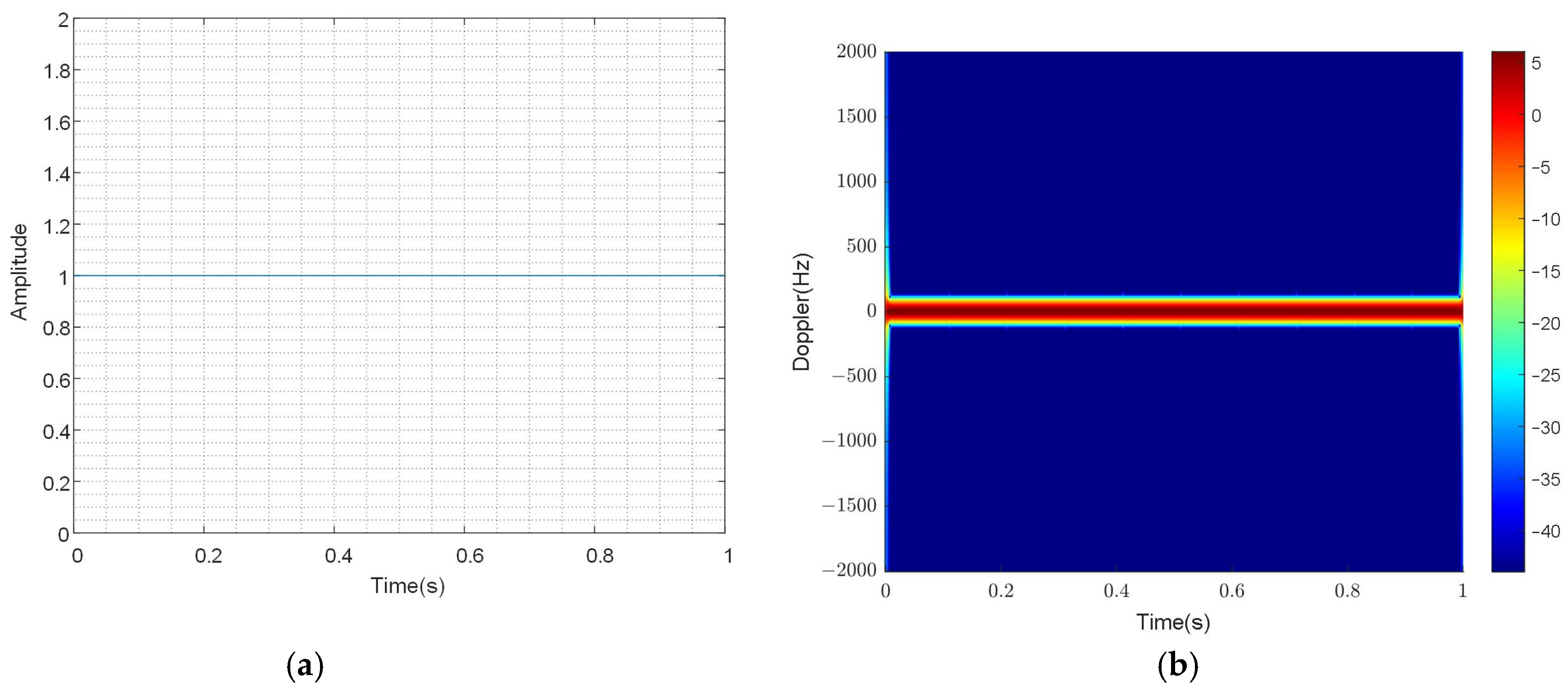
Scenario 2.2: When
,
, and
, there is a proportional relationship between the phase parts of each scattering point, which can be integrated. The signal can be transformed at this point, as shown in Equation (22).
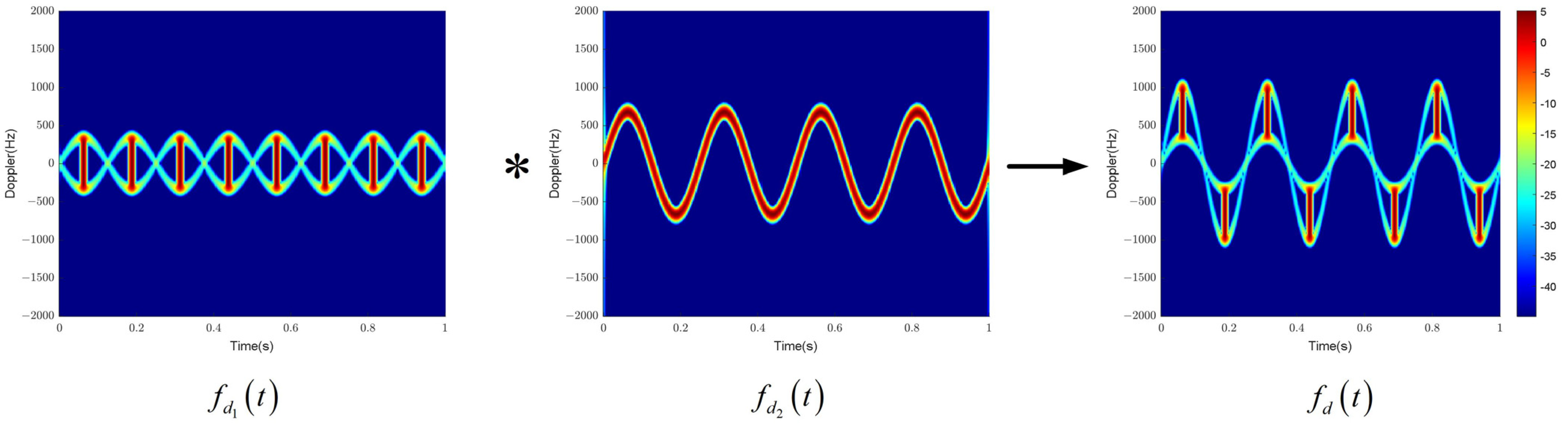
In the time domain, the signal amplitude decreases and becomes the original. The phase part is divided into two parts in the time domain, as shown as follows in Equations (23) and (24):
For the first part
, when the denominator is
and only
, it impacts the instantaneous Doppler frequency of the signal. At other times, it only exhibits broadening (or compression) in the frequency domain. The instantaneous Doppler frequency can be seen as the phase derivative of the two single components in the middle, as shown in Equation (25). For the second part, the phase can be directly differentiated, as shown in Equation (26):
At this point, we convolve the instantaneous Doppler frequencies of the two parts as follows:
According to the results, there are two curves in the time–frequency domain, one with an amplitude of the sine modulation curve and the other with an amplitude of the sine modulation curve. The instantaneous Doppler frequency value of the blade echo is given by the following:

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}