

Zero-Shot Learning-Based Recognition of Highlight Images of Echoes of Active Sonar

 , ,
, ,
Abstract
1. Introduction
- The underwater target highlight model has been enhanced to depict more accurately the distance, echo intensity, horizontal angle, pitch angle and frequency response of each highlight scattering region of targets. This model serves as the theoretical foundation for extracting highlight information and can be utilized to generate the simulation data of underwater targets in order to address the issue of data scarcity.
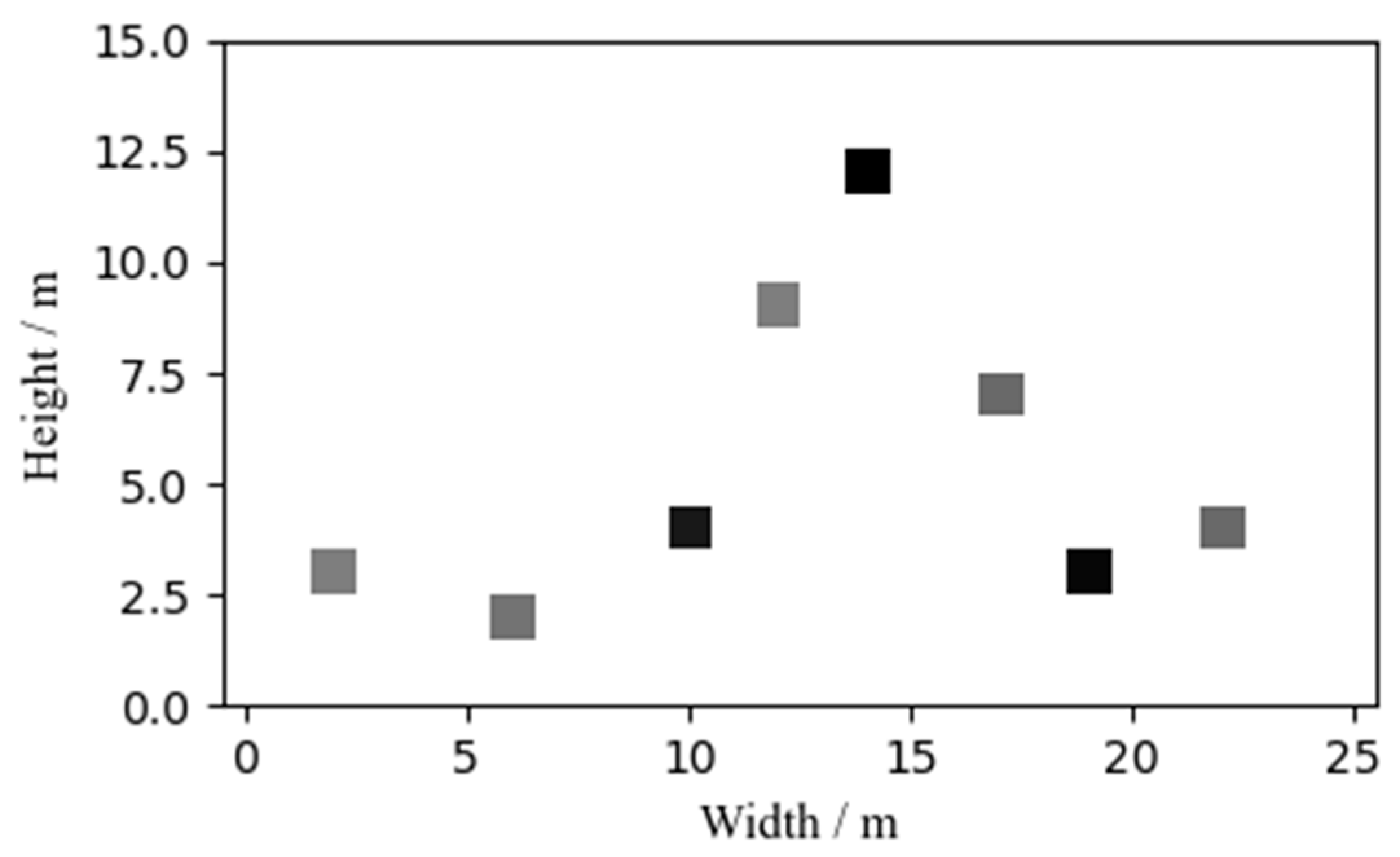
- The paper proposes a methodology for acquiring the highlight image of underwater targets by utilizing cross-spectral directional or high-resolution DOA algorithms, thereby enabling the retrieval of multi-highlight information from moving targets at long distances. Furthermore, it employs the principle of orthogonal projection to derive the distribution map of the highlight scattering region on the target.
- The HasNet-5 convolutional classification network is established, which leverages the concept of zero-shot learning. The network is trained using simulation data from four typical disturbance targets and an underwater vehicle, enabling it to effectively extract both global features and local highlight features of underwater targets. The effectiveness of the recognition method is validated through experimental data, demonstrating a recognition probability of 92% for actual targets and 94% for 2D disturbance targets.
2. Theory and Methodology
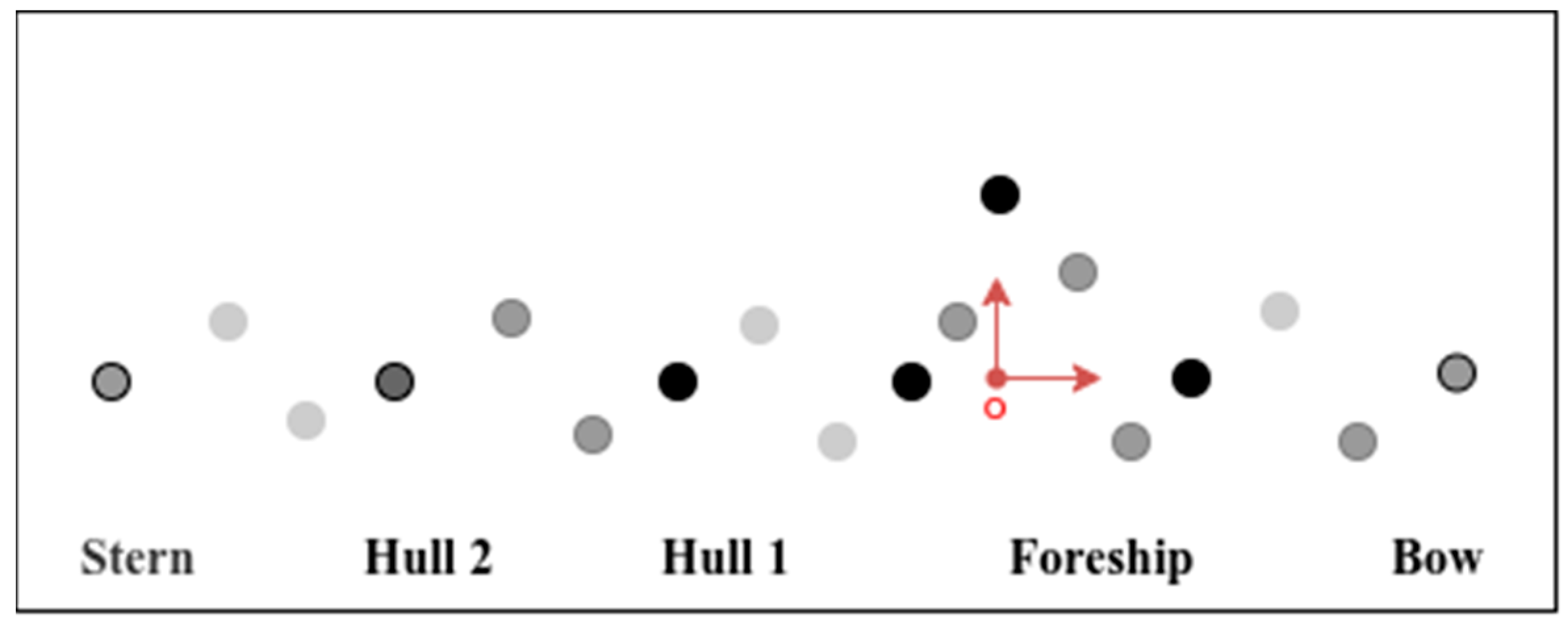
2.1. Improvement of Underwater Target Highlight Model
2.2. Method for Underwater Target Highlight Image Acquisition
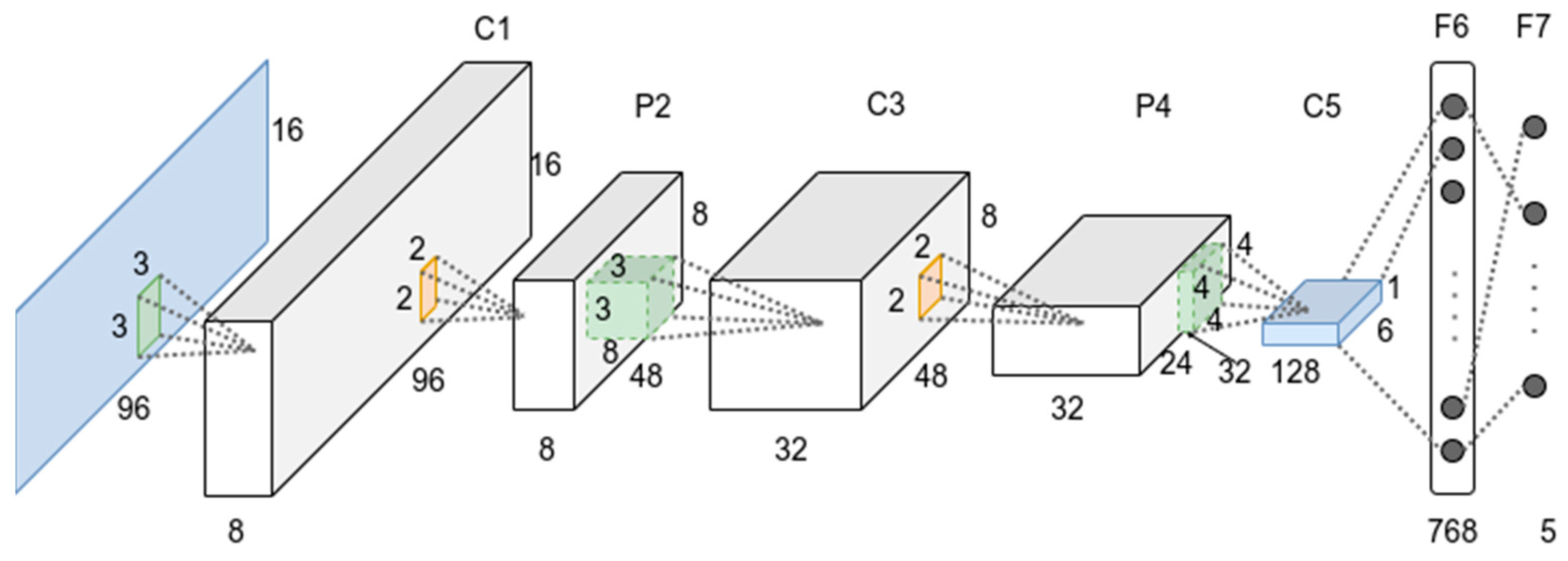
2.3. Design of the HasNet-5 Convolutional Neural Network
3. Validation and Analysis
3.1. Dataset
3.2. Evaluation Metrics
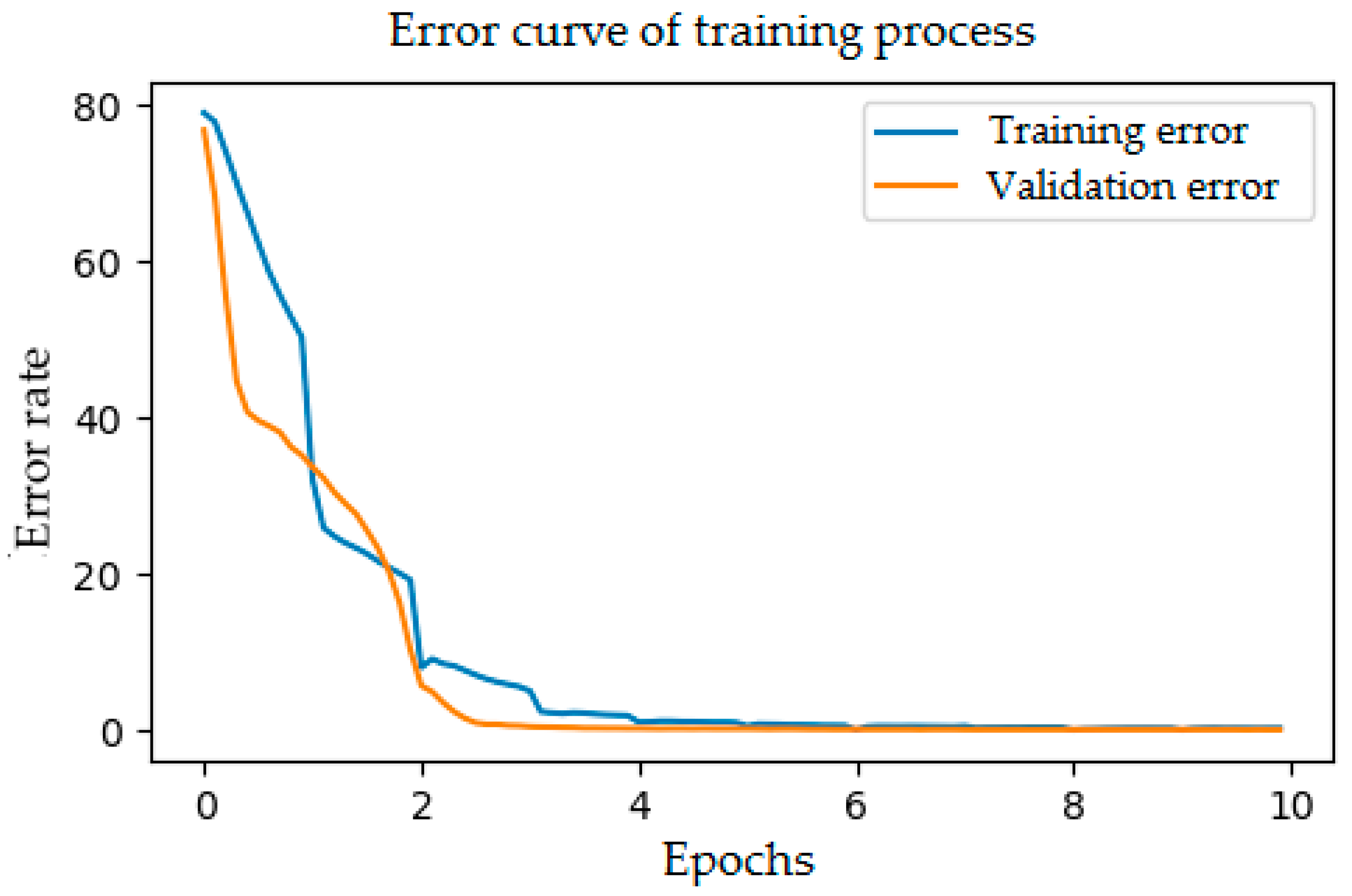
3.3. Validation
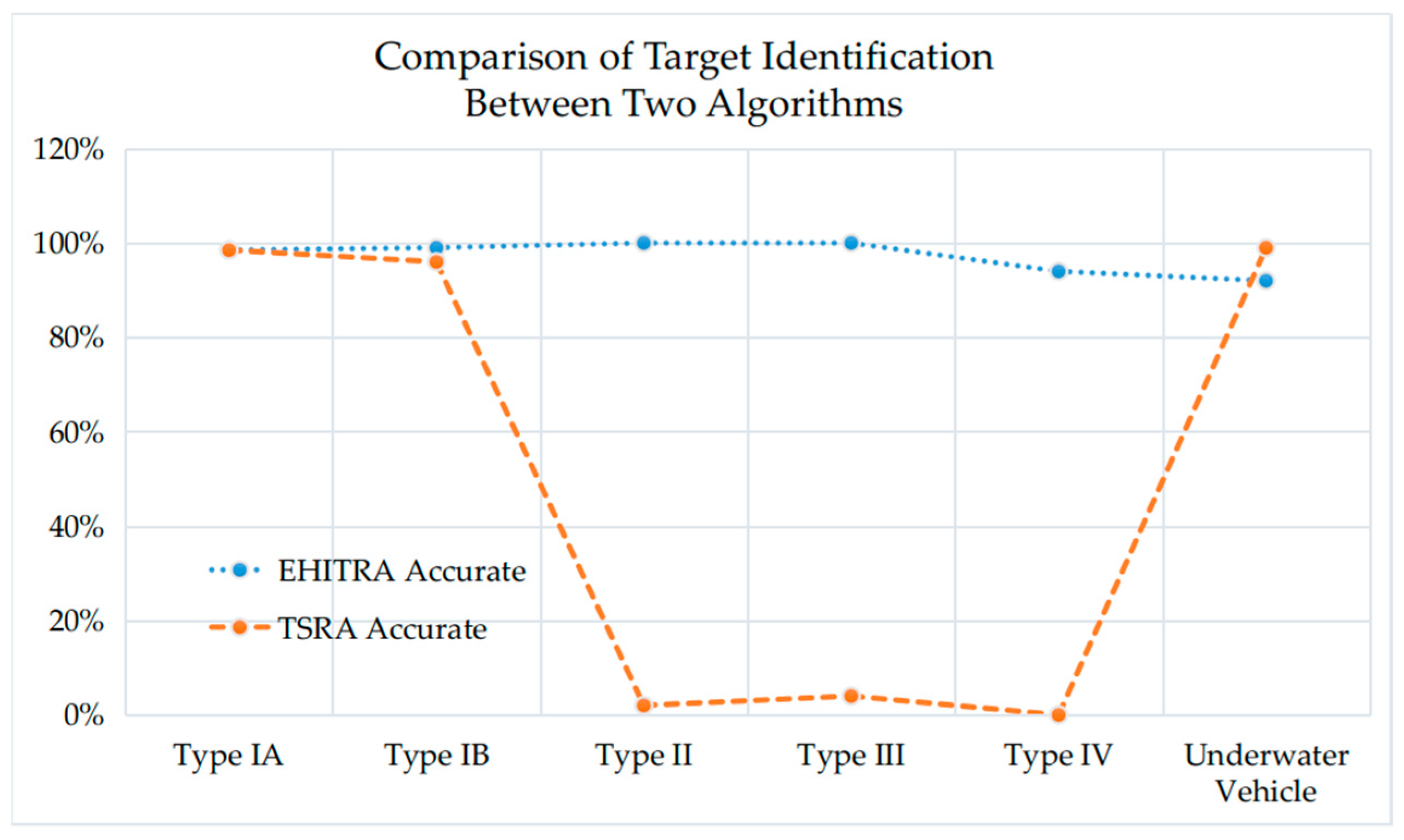
3.4. Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liang, K.; Wang, K. Using Simulation and Evolutionary Algorithms to Evaluate the Design of Mix Strategies of Decoy and Jammers in Anti-Torpedo Tactics. In Proceedings of the 2006 Winter Simulation Conference, Monterey, CA, USA, 3–6 December 2006; pp. 1299–1306. [Google Scholar]
- Chen, Y.C.; Guo, Y.H. Optimal Combination Strategy for Two Swim-Out Acoustic Decoys to Countermeasure Acoustic Homing Torpedo. In Proceedings of the 2017 4th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 21–23 July 2017; pp. 1061–1065. [Google Scholar]
- Sun, T.; Jin, J.; Liu, T.; Zhang, J. Active sonar target classification method based on Fisher’s dictionary learning. Appl. Sci. 2021, 11, 10635. [Google Scholar] [CrossRef]
- Yu, L.; Cheng, Y.; Li, S.; Liang, Y.; Wang, X. Tracking and length estimation of underwater acoustic target. Electron. Lett. 2017, 53, 1224–1226. [Google Scholar] [CrossRef]
- Yong, J.; Chen, Y.; Jia, B.; Zhang, Y. Simulation of Phase Characteristics of Underwater Target Acoustic Scattering. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–5. [Google Scholar]
- Liu, Z.; Li, Z.; Ma, G.; Wang, M. Submarine Target Identification based on Short-time Cross-spectrum. Fire Control. Command. Control. 2005, 1, 103–106. [Google Scholar]
- Hao, B.; Wang, M.; Xiao, L. A Research of Echo-Bearing Fluctuation Feature of Underwater Target. Torpedo Technol. 2004, 12, 20–23. [Google Scholar]
- Wang, Z.; Wu, J.; Wang, H.; Hao, Y.; Wang, H. A torpedo target recognition method based on the correlation between echo broadening and apparent angle. Appl. Sci. 2022, 12, 12345. [Google Scholar] [CrossRef]
- Xu, Y.; Yuan, B.; Zhang, H. An improved algorithm of underwater target feature abstracting based on target azimuth tendency. Appl. Mech. Mater. 2012, 155–156, 1164–1169. [Google Scholar]
- Wu, H.; Pan, M. Direction Identification Method of the Two-dimensional Scale Sound Target. Ship Electron. Eng. 2016, 36, 139–142. [Google Scholar]
- Liu, X.; Dong, C. A Method of Distinguishing Submarine and Acoustic Decoy Based on Features of Target Space Dimension. Torpedo Technol. 2008, 5, 46–50. [Google Scholar]
- Philips, S.; Pitton, J.; Atlas, L. Perceptual Feature Identification for Active Sonar Echoes. In Proceedings of the OCEANS, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar]
- Ou, H.H.; Au, W.W.L.; Syrmos, V.L. Underwater Ordnance Classification Using Time-Frequency Signatures of Backscattering Signals. In Proceedings of the OCEANS, Seattle, WA, USA, 20–23 September 2010; pp. 1–8. [Google Scholar]
- Malarkodi, A.; Manamalli, D.; Kavitha, G.; Latha, G. Acoustic Scattering of Underwater Targets. In Proceedings of the Ocean Electronics (SYMPOL), Kochi, India, 23–25 October 2013; pp. 127–132. [Google Scholar]
- Yu, X.; Zhai, J.; Zou, B.; Shao, Q.; Hou, G. A novel acoustic sediment classification method based on the k-medoids algorithm using multibeam echosounder backscatter intensity. J. Mar. Sci. Eng. 2021, 9, 508. [Google Scholar] [CrossRef]
- Kubicek, B.; Sen Gupta, A.; Kirsteins, I. Feature extraction and classification of simulated monostatic acoustic echoes from spherical targets of various materials using convolutional neural networks. J. Mar. Sci. Eng. 2023, 11, 571. [Google Scholar] [CrossRef]
- Zhang, T.; Liu, S.; He, X.; Huang, H.; Hao, K. Underwater target tracking using forward-looking sonar for autonomous underwater vehicles. Sensors 2020, 20, 102. [Google Scholar] [CrossRef] [PubMed]
- Palomeras, N.; Furfaro, T.; Williams, D.P.; Carreras, M.; Dugelay, S. Automatic target recognition for mine countermeasure missions using forward-looking sonar data. IEEE J. Ocean. Eng. 2022, 47, 141–161. [Google Scholar] [CrossRef]
- Zhang, B.; Zhou, T.; Shi, Z.; Xu, C.; Yang, K.; Yu, X. An underwater small target boundary segmentation method in forward-looking sonar images. Appl. Acoust. 2023, 207, 109341. [Google Scholar] [CrossRef]
- Chungath, T.T.; Nambiar, A.M.; Mittal, A. Transfer learning and few-shot learning based deep neural network models for underwater sonar image classification with a few samples. IEEE J. Ocean. Eng. 2023, 99, 1–17. [Google Scholar] [CrossRef]
- Kriminger, E.; Tory Cobb, J.; Príncipe, J.C. Online active learning for automatic target recognition. IEEE J. Ocean. Eng. 2015, 40, 583–591. [Google Scholar] [CrossRef]
- Gerg, I.D.; Monga, V. Structural prior driven regularized deep learning for sonar image classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Xia, Z.; Li, X.; Meng, X. High resolution time-delay estimation of underwater target geometric scattering. Appl. Acoust. 2016, 114, 111–117. [Google Scholar] [CrossRef]
- Wu, Y.; Li, X.; Wang, Y. Extraction and classification of acoustic scattering from underwater target based on Wigner-Ville distribution. Appl. Acoust. 2018, 138, 52–59. [Google Scholar] [CrossRef]
- Li, X.; Xu, T.; Chen, B. Atomic decomposition of geometric acoustic scattering from underwater target. Appl. Acoust. 2018, 140, 205–213. [Google Scholar] [CrossRef]
- Rui, L.; Junying, A.; Gang, C. Target Geometric Configuration Estimation Based on Acoustic Scattering Spatiotemporal Characteristics. In Proceedings of the IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–4. [Google Scholar]
- Tang, W. Highlight model of echoes from sonar targets. J. Acoust. 1994, 19, 92–100. [Google Scholar]
- Song, Z.; Lanrui, L.; Xinhua, Z.; Dawei, Z.; Mingyuan, L. Simulation of Backscatter Signal of Submarine Target Based on Spatial Distribution Characteristics of Target Intensity. In Proceedings of the OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021; pp. 234–239. [Google Scholar]
- Zhao, A.; He, C.; Hui, J.; Niu, F. Research of Sonar Echo Highlights Measurement. In Proceedings of the OCEANS 2014, Taipei, Taiwan, 7–10 April 2014; pp. 1–9. [Google Scholar]
- Jiang, Y.; Hao, X.; Feng, H.; Hui, J. A Study on 2-Dimensional Highlight Distribution of Underwater Target. J. Acoust. 1997, 22, 79–86. [Google Scholar]
- Chen, H.; Fengzhen, Z.; Zhaohui, Z.; Yuan, P.; Yi, J. Echo Highlight Model of Underwater Target and Design of FPGA Signal Simulation Module. In Proceedings of the 2020 5th International Conference on Communication, Image and Signal Processing (CCISP), Chengdu, China, 13–15 November 2020; pp. 53–57. [Google Scholar]
- Sun, R.; Ma, X.; Shu, X. Simulation of Echoes from Submarine in Shallow Waters. In Proceedings of the 2013 2nd International Conference on Measurement, Information and Control, Harbin, China, 16–18 August 2013; pp. 851–854. [Google Scholar]
- Kim, B.I.; Lee, H.U.; Park, M.H. A Study on Highlight Distribution for Underwater Simulated Targets. In Proceedings of the IEEE International Symposium on Industrial Electronics Proceedings (Cat. No. 1), Busan, Republic of Korea, 12–16 June 2001; pp. 1988–1992. [Google Scholar]
- Liu, W.; Zhao, J.; Song, Y.; Zhang, J. Underwater Target Modeling Technology Based on Modified Highlight Model. Torpedo Technol. 2010, 18, 352–356. [Google Scholar]
- Deng, K.; Xiang, X.; Gu, J. Multi-highlight model of scaling acoustic decoy. Acoust. Technol. 2011, 30, 201–205. [Google Scholar]
- Wang, B.; Wang, W.; Fan, J.; Zhao, K.; Zhou, F.; Tan, L. Modeling of bistatic scattering from an underwater non-penetrable target using a Kirchhoff approximation method. Def. Technol. 2022, 18, 1097–1106. [Google Scholar] [CrossRef]
- Zhao, J. Based on scale constraint K-means underwater target highlights clustering algorithm. In Proceedings of the 2023 4th International Conference on Computer Engineering and Application (ICCEA), Hangzhou, China, 7–9 April 2023; pp. 456–459. [Google Scholar]
- Luo, T.; Xing, G.; Ge, C.; Niu, X. DOA Estimation based on Cross-Spectrum through a Co-Prime Array. In Proceedings of the 2021 4th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Changsha, China, 26–28 March 202; pp. 817–822.
- Long, Y.; Liu, L.; Shen, F.; Shao, L.; Li, X. Zero-shot learning using synthesized unseen visual data with diffusion regularisation. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 2498–2512. [Google Scholar] [CrossRef]
- Larochelle, H.; Erhan, D.; Bengio, Y. Zero-data Learning of New Tasks. In Proceedings of the Twenty-Third AAAI Conference on Artificial Intelligence, Chicago, IL, USA, 13–17 July 2008; pp. 646–651. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Type | Advantages | Unsolved Problems |
|---|---|---|
| Target scale recognition algorithms | The algorithm is straightforward and computationally efficient, rendering it suitable for stationary as well as low- and high-speed moving targets. | It is challenging to discriminate between 2D disturbance targets and real targets. |
| Time-frequency feature recognition algorithms | These algorithms are capable of extracting intricate features that accurately capture the geometric shape, size and material properties of targets. | The validation of these algorithms is based on the data obtained from pool tests, and the recognition capability for long-distance moving targets has not been verified. |
| Acoustic imaging recognition algorithms | The acquisition of images that capture the geometric shape and echo intensity of targets can be achieved. | Currently, long-distance moving target recognition remains unfeasible for application. |
| Geometric structure recognition algorithms | Relevant information regarding the target, such as its geometric shape, size and structure, can be effectively extracted. | The validation relies on pool test data, while the investigation of long-distance moving targets recognition remains unexplored. |
| Layer | Kernel Size | Stride | Number of Filters | Activation | Output Shape | |
|---|---|---|---|---|---|---|
| Input | Image | - | - | - | - | 96 × 16 |
| 1 | Conv1 | 3 × 3 | 1 | 8 | ReLu | 96 × 16 |
| 2 | Pool2 | 2 × 2 | 1 | - | - | 48 × 8 |
| 3 | Conv3 | 3 × 3 | 1 | 32 | ReLu | 48 × 8 |
| 4 | Pool4 | 2 × 2 | 1 | - | - | 24 × 4 |
| 5 | Conv5 | 4 × 4 | 4 | 128 | ReLu | 6 × 1 |
| 6 | FC6 | - | - | - | - | 768 |
| Output | FC7 | - | - | - | Softmax | 5 |
| Target Type | Horizontal Bow Angle (°) | Tilt Angle (°) | Number of Samples |
|---|---|---|---|
| Underwater vehicle | 30, 40, 50, 60, 120, 130, 140, 150 | −4, −2, 0, 2, 4 | 10,000 |
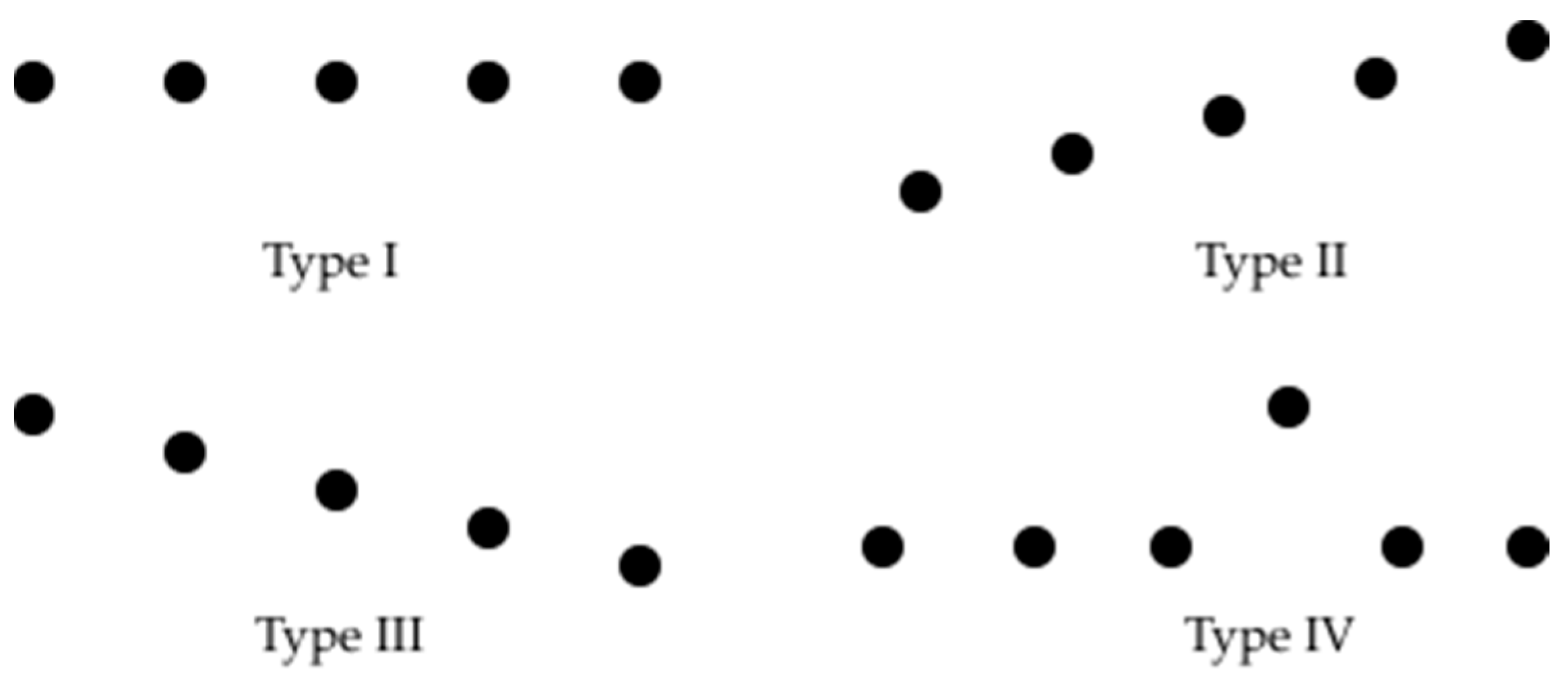
| Type I disturbance | 30, 40, 50, 60, 120, 130, 140, 150 | −4, −2, 0, 2, 4 | 10,000 |
| Type II disturbance | 30, 40, 50, 60, 120, 130, 140, 150 | −4, −2, 0, 2, 4 | 10,000 |
| Type III disturbance | 30, 40, 50, 60, 120, 130, 140, 150 | −4, −2, 0, 2, 4 | 10,000 |
| Type IV disturbance | 30, 40, 50, 60, 120, 130, 140, 150 | −4, −2, 0, 2, 4 | 10,000 |
| Total | 50,000 |
| Type of Sample Set | Generated Training Sample Set | Generated Validation Sample Set | Generated Test Sample Set | Test Sample Set of Experimental Data |
|---|---|---|---|---|
| Number of samples | 50,000 | 5000 | 5000 | 550 |
| Data Type | Classification Results | Classification Correctness Rate | Recognition Correctness Rate | ||||
|---|---|---|---|---|---|---|---|
| Type I Disturbance A | Type II Disturbance B | Type III Disturbance | Type IV Disturbance | Underwater Vehicle | |||
| Type I disturbance A | 197 | 0 | 0 | 0 | 3 | 98.5% | 98.5% |
| Type I disturbance B | 96 | 0 | 0 | 0 | 4 | 96% | 96% |
| Type II disturbance | 1 | 0 | 0 | 0 | 49 | 2% | 2% |
| Type III disturbance | 2 | 0 | 0 | 0 | 48 | 4% | 4% |
| Type IV disturbance | 0 | 0 | 0 | 0 | 50 | 0% | 0% |
| Underwater vehicle | 1 | 0 | 0 | 0 | 99 | 99% | 99% |
| Data Type | Classification Results | Classification Correctness Rate | Recognition Correctness Rate | ||||
|---|---|---|---|---|---|---|---|
| Type I Disturbance A | Type II Disturbance B | Type III Disturbance | Type IV Disturbance | Underwater Vehicle | |||
| Type I disturbance A | 188 | 9 | 0 | 0 | 3 | 94% | 98.5% |
| Type I disturbance B | 96 | 3 | 0 | 0 | 1 | 96% | 99% |
| Type II disturbance | 1 | 49 | 0 | 0 | 0 | 98% | 100% |
| Type III disturbance | 2 | 0 | 48 | 0 | 0 | 96% | 100% |
| Type IV disturbance | 1 | 0 | 0 | 46 | 3 | 92% | 94% |
| Underwater vehicle | 1 | 1 | 2 | 4 | 92 | 92% | 92% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Yang, Y.; Yang, X.; Liu, L.; Shi, L.; Li, Y.; Liu, J. Zero-Shot Learning-Based Recognition of Highlight Images of Echoes of Active Sonar. Electronics 2024, 13, 457. https://doi.org/10.3390/electronics13020457
Liu X, Yang Y, Yang X, Liu L, Shi L, Li Y, Liu J. Zero-Shot Learning-Based Recognition of Highlight Images of Echoes of Active Sonar. Electronics. 2024; 13(2):457. https://doi.org/10.3390/electronics13020457
Chicago/Turabian StyleLiu, Xiaochun, Yunchuan Yang, Xiangfeng Yang, Liwen Liu, Lei Shi, Yongsheng Li, and Jianguo Liu. 2024. "Zero-Shot Learning-Based Recognition of Highlight Images of Echoes of Active Sonar" Electronics 13, no. 2: 457. https://doi.org/10.3390/electronics13020457
APA StyleLiu, X., Yang, Y., Yang, X., Liu, L., Shi, L., Li, Y., & Liu, J. (2024). Zero-Shot Learning-Based Recognition of Highlight Images of Echoes of Active Sonar. Electronics, 13(2), 457. https://doi.org/10.3390/electronics13020457