
Enabling Technologies for the Navigation and Communication of UAS Operating in the Context of BVLOS

 , ,
, ,  , , ,
, , , 
 and
and 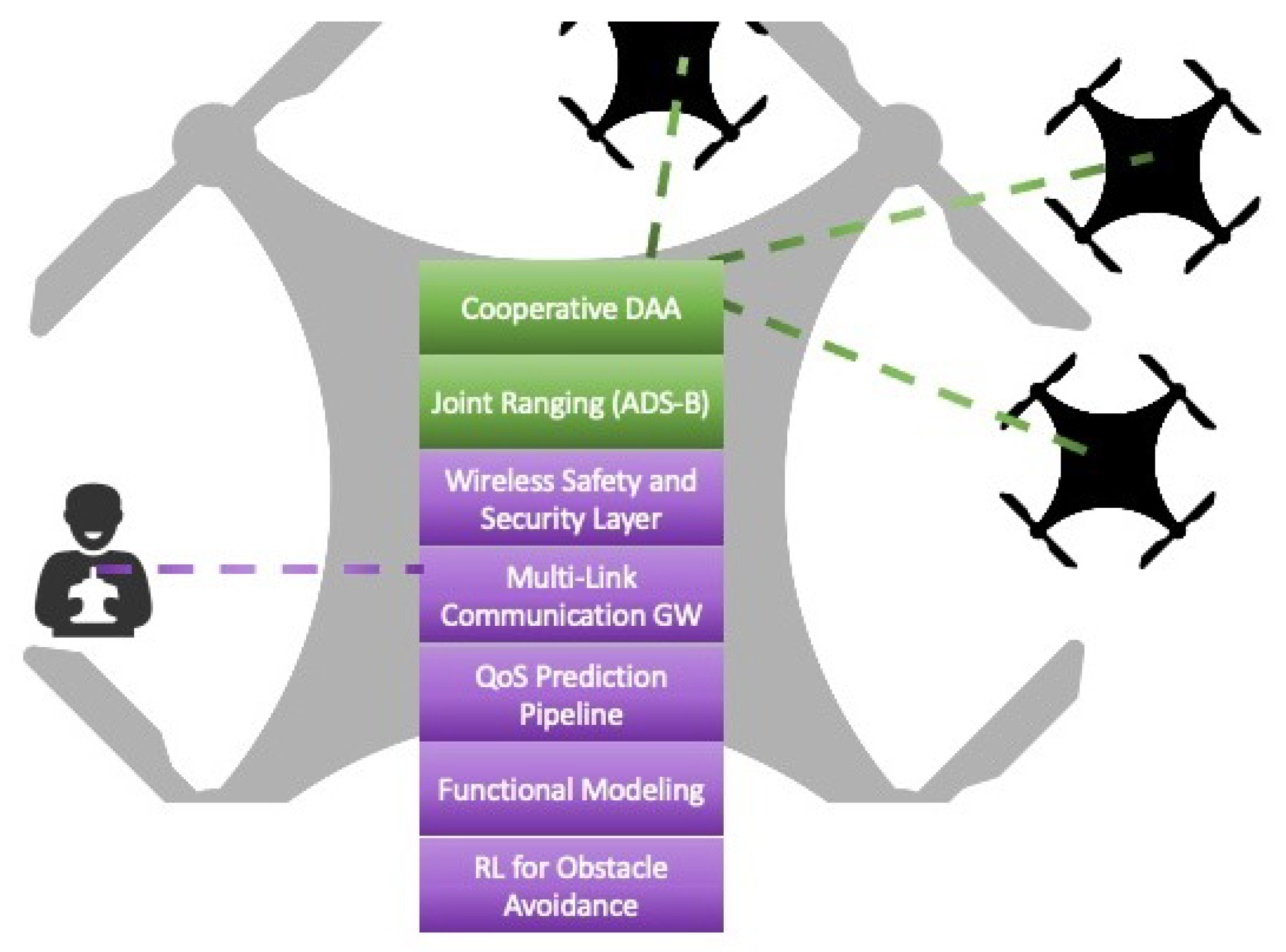{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Opportunities and Challenges
1.2. Scope and Contributions
2. Related Work
2.1. Detect and Avoid Technologies
2.2. Communication Technologies
2.3. Autonomous Navigation
2.4. UAS Emerging Use Cases
2.4.1. Logistics and Delivery of Goods
2.4.2. Forestry and Agriculture
2.4.3. Infrastructure Maintenance
2.4.4. Search and Rescue Operations
3. Architecture and Functionalities
- Interface to the data links with an API for the access technologies, allowing us to incorporate new technologies as they become available or as needed to support specific operational scenarios;
- Interface to system component to determine link availability;
- Detecting possible obstacles interface to the QoS estimation and prediction component.
4. Implementation
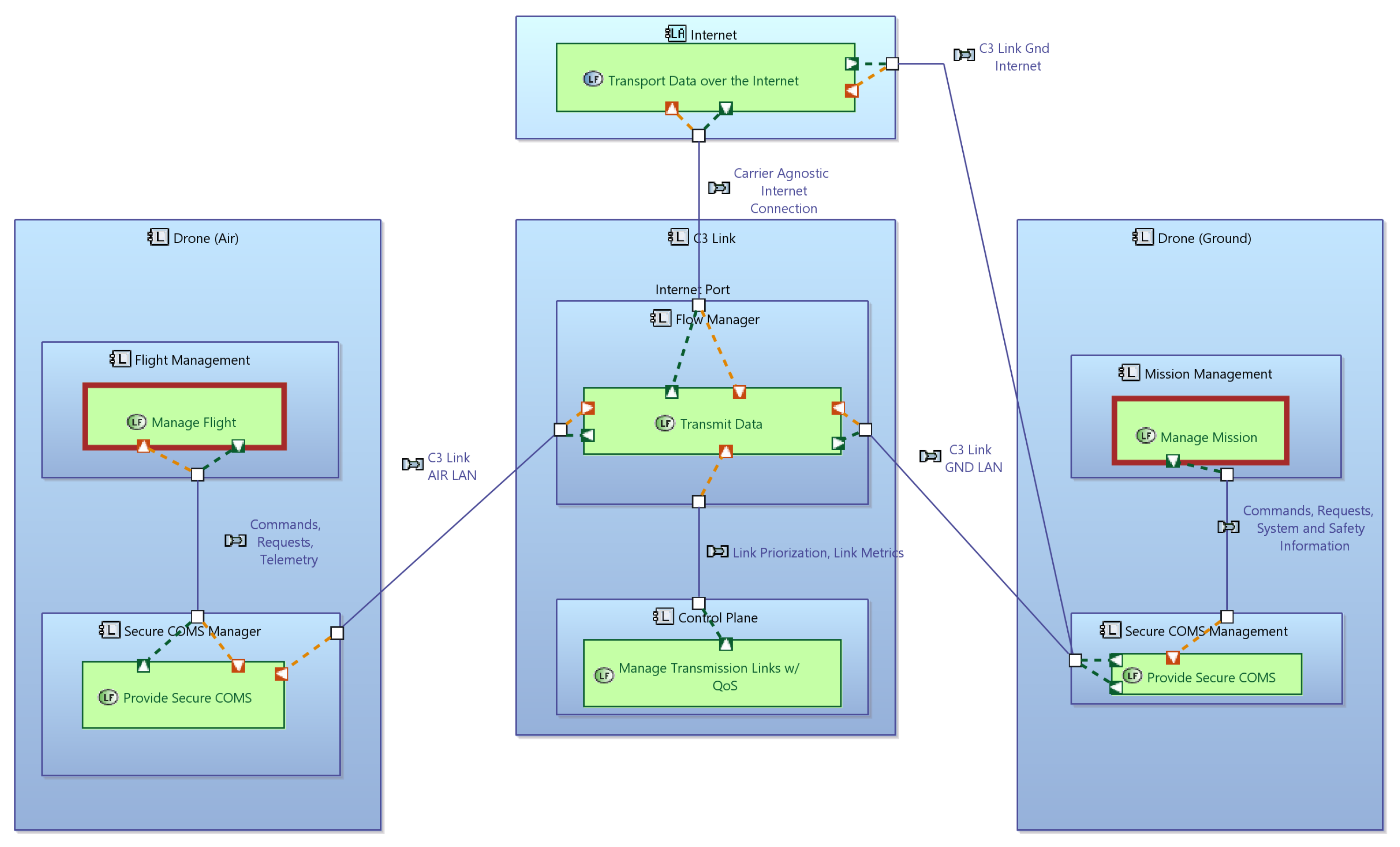
4.1. Functional Modeling
- Interface to the data links consists of a UDP-based protocol to transmit data in the two directions, from the drone to the ground and the ground to the drone. UDP is chosen here as it allows us to incorporate the highest number of access technologies, from WiFi local links, over mobile networks, to Sat-COM. A specific state machine-based technical architecture is developed, where state machines track the state of each UDP-based connection, as well as the multi-link connection consisting of one or more of the underlying UDP connections.
- Interface to a system component to determine link availability. Links become available, or not available, as the aircraft moves over the flight geography, and the control plane of the C3 link needs to detect this and adjust its algorithms for link selection for each data packet. Current Linux-based systems make this information available via the networking stack and the device drivers, but with a significant delay. For instance, drivers for mobile network modules report the link as available for many seconds after the packet loss has reached 100%. Hence, the control place must detect this situation and react accordingly based on information that it collects itself.
- Interface to the QoS estimation and prediction component. This component is discussed in the section on communication modules.
4.2. Cooperative Detect and Avoid
- Detection of other manned and unmanned aircraft;
- Tracking of the detected aircraft;
- Detecting possible obstacles (e.g., buildings, structures, and persons);
- Determining an avoidance maneuver;
- –
- Avoidance in the sense of ‘Remain Well Clear’ (RWC)
- –
- Avoidance in the sense of Collision Avoidance (CA)
- Executing the determined avoidance maneuver.
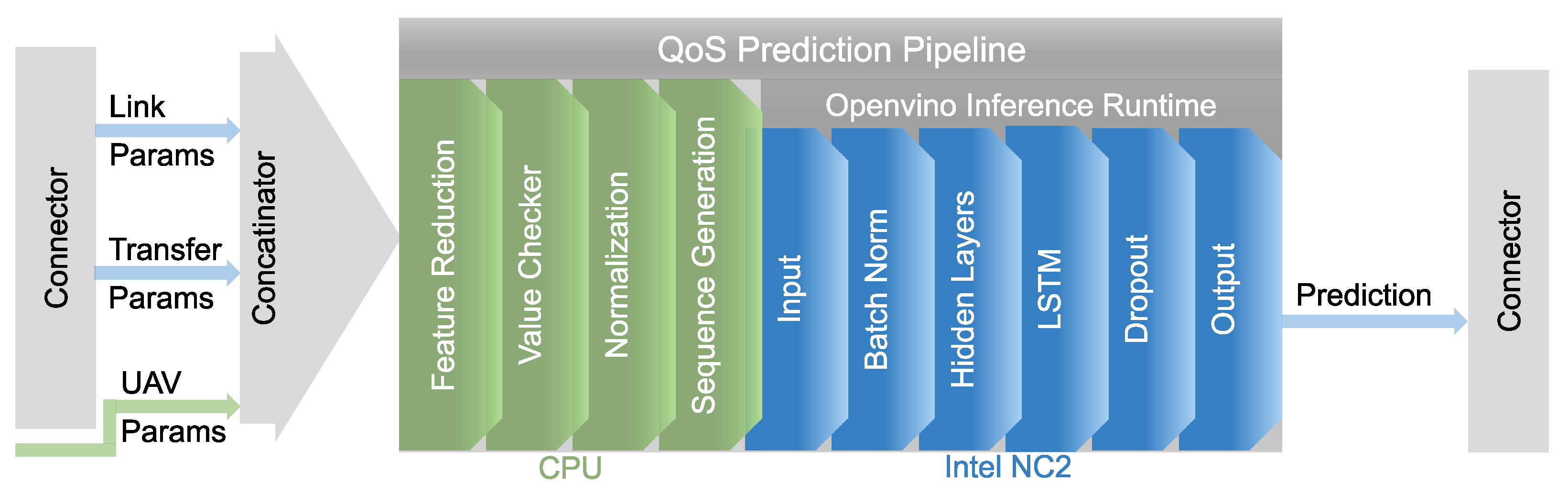
4.3. Communication Modules
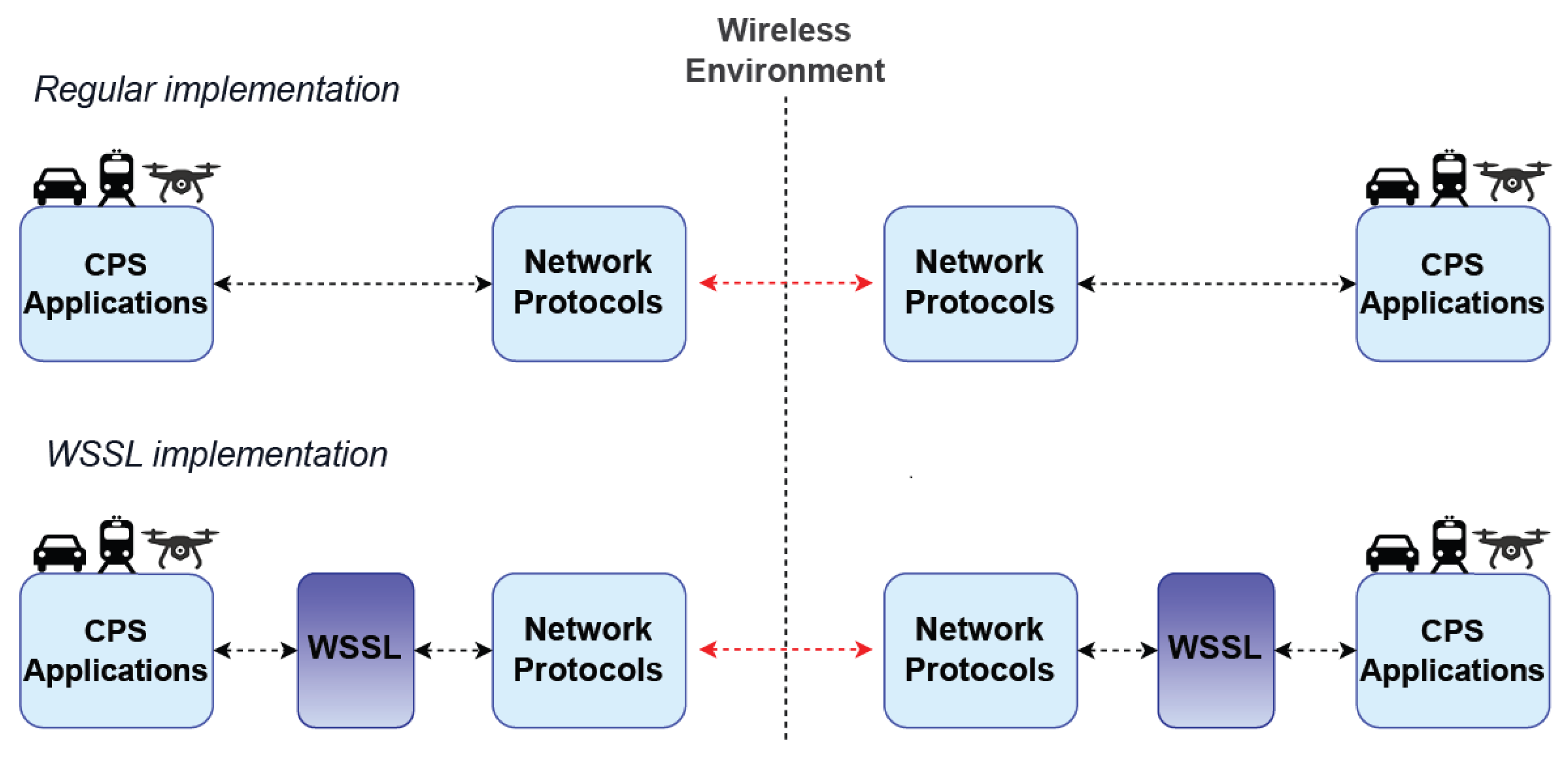
4.4. Wireless Safety and Security Layer
4.5. Robust Spatio-Temporal Awareness of UAV Swarms
4.6. Autonomous Navigation and Scene Perception
4.7. Seamless Integration of Proposed Technologies
5. Discussion
5.1. Societal Acceptance of BVLOS Operations
5.2. Regulatory Considerations
5.3. Open Issues and Challenges
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- International Communication Association Organization. ICAO Cir 328, Unmanned Aircraft Systems (UAS). 2011. Available online: https://www.icao.int/Meetings/UAS/Documents/Circular%20328_en.pdf (accessed on 30 July 2023).
- Nex, F.; Armenakis, C.; Cramer, M.; Cucci, D.A.; Gerke, M.; Honkavaara, E.; Kukko, A.; Persello, C.; Skaloud, J. UAV in the advent of the twenties: Where we stand and what is next. ISPRS J. Photogramm. Remote Sens. 2022, 184, 215–242. [Google Scholar]
- Hussein, M.; Nouacer, R.; Corradi, F.; Ouhammou, Y.; Villar, E.; Tieri, C.; Castiñeira, R. Key technologies for safe and autonomous drones. Microprocess. Microsyst. 2021, 87, 104348. [Google Scholar] [CrossRef]
- Fan, B.; Li, Y.; Zhang, R.; Fu, Q. Review on the technological development and application of UAV systems. Chin. J. Electron. 2020, 29, 199–207. [Google Scholar] [CrossRef]
- Drone Industry Insights. Available online: https://droneii.com/product/drone-market-report (accessed on 20 September 2023).
- Wu, X.; Li, W.; Hong, D.; Tao, R.; Du, Q. Deep learning for unmanned aerial vehicle-based object detection and tracking: A survey. IEEE Geosci. Remote Sens. Mag. 2021, 10, 91–124. [Google Scholar] [CrossRef]
- Alawad, W.; Halima, N.B.; Aziz, L. An Unmanned Aerial Vehicle (UAV) System for Disaster and Crisis Management in Smart Cities. Electronics 2023, 12, 1051. [Google Scholar] [CrossRef]
- Velusamy, P.; Rajendran, S.; Mahendran, R.K.; Naseer, S.; Shafiq, M.; Choi, J.G. Unmanned Aerial Vehicles (UAV) in precision agriculture: Applications and challenges. Energies 2021, 15, 217. [Google Scholar] [CrossRef]
- Hartley, R.J.a.L.; Henderson, I.L.; Jackson, C.L. BVLOS unmanned aircraft operations in forest environments. Drones 2022, 6, 167. [Google Scholar] [CrossRef]
- Li, J.; Zhou, W.; Gong, W.; Lu, Z.; Yan, H.; Wei, W.; Wang, Z.; Shen, C.; Pang, J. LiDAR-Assisted UAV Stereo Vision Detection in Railway Freight Transport Measurement. Drones 2022, 6, 367. [Google Scholar] [CrossRef]
- Kozioł, A.; Sobczyk, A. Usage of unmanned aerial vehicles in medical services: A review. Mater. Res. Proc. 2022, 24. [Google Scholar] [CrossRef]
- Straubinger, A.; Rothfeld, R.; Shamiyeh, M.; Büchter, K.D.; Kaiser, J.; Plötner, K.O. An overview of current research and developments in urban air mobility—Setting the scene for UAM introduction. J. Air Transp. Manag. 2020, 87, 101852. [Google Scholar] [CrossRef]
- Aldao, E.; González-de Santos, L.M.; González-Jorge, H. Lidar based detect and avoid system for uav navigation in uam corridors. Drones 2022, 6, 185. [Google Scholar] [CrossRef]
- SESAR Joint Undertaking. Available online: https://www.sesarju.eu/u-space-blueprint (accessed on 19 October 2023).
- Voirin, J.L. Model-Based System and Architecture Engineering with the Arcadia Method; Elsevier: Amsterdam, The Netherlands, 2017; pp. 1–368. [Google Scholar]
- Eurocontrol. U-Space CONOPS, 4th ed.; Technical Report; SESAR: Brussels, Belgium, 2023. [Google Scholar]
- Tan, L.K.L.; Lim, B.C.; Park, G.; Low, K.H.; Yeo, V.C.S. Public acceptance of drone applications in a highly urbanized environment. Technol. Soc. 2021, 64, 101462. [Google Scholar] [CrossRef]
- Yoo, W.; Yu, E.; Jung, J. Drone delivery: Factors affecting the public’s attitude and intention to adopt. Telemat. Inform. 2018, 35, 1687–1700. [Google Scholar]
- Amazon. Amazon Reveals the New Design for Prime Air’s Delivery Drone. 2022. Available online: https://www.aboutamazon.com/news/transportation/amazon-prime-air-delivery-drone-reveal-photos (accessed on 30 July 2023).
- Press, D. DHL Express Launches ITS First Regular Fully-Automated and Intelligent Urban Drone Delivery Service. 2019. Available online: https://www.dhl.com/global-en/home/press/press-archive/2019/dhl-express-launches-its-first-regular-fully-automated-and-intelligent-urban-drone-delivery-service.html (accessed on 30 July 2023).
- Mikołajczyk, T.; Mikołajewski, D.; Kłodowski, A.; Łukaszewicz, A.; Mikołajewska, E.; Paczkowski, T.; Macko, M.; Skornia, M. Energy Sources of Mobile Robot Power Systems: A Systematic Review and Comparison of Efficiency. Appl. Sci. 2023, 13, 7547. [Google Scholar] [CrossRef]
- Horla, D.; Giernacki, W.; Báča, T.; Spurny, V.; Saska, M. AL-TUNE: A family of methods to effectively tune UAV controllers in in-flight conditions. J. Intell. Robot. Syst. 2021, 103, 5. [Google Scholar] [CrossRef]
- Qian, B.; Al Said, N.; Dong, B. New technologies for UAV navigation with real-time pattern recognition. Ain Shams Eng. J. 2023, 15, 102480. [Google Scholar] [CrossRef]
- Dogra, A.; Jha, R.K.; Jain, S. A survey on beyond 5G network with the advent of 6G: Architecture and emerging technologies. IEEE Access 2020, 9, 67512–67547. [Google Scholar] [CrossRef]
- Jin, H.; Jin, X.; Zhou, Y.; Guo, P.; Ren, J.; Yao, J.; Zhang, S. A survey of energy efficient methods for UAV communication. Veh. Commun. 2023, 41, 100594. [Google Scholar]
- Gu, X.; Zhang, G. A survey on UAV-assisted wireless communications: Recent advances and future trends. Comput. Commun. 2023, 208, 44–78. [Google Scholar]
- Rahmatov, N.; Baek, H. RIS-carried UAV communication: Current research, challenges, and future trends. ICT Express 2023, 9, 961–973. [Google Scholar]
- Guerna, A.; Bitam, S.; Calafate, C.T. Roadside unit deployment in internet of vehicles systems: A survey. Sensors 2022, 22, 3190. [Google Scholar] [CrossRef] [PubMed]
- Hou, T.; Liu, Y.; Song, Z.; Sun, X.; Chen, Y. Exploiting NOMA for UAV communications in large-scale cellular networks. IEEE Trans. Commun. 2019, 67, 6897–6911. [Google Scholar] [CrossRef]
- Kosuda, M.; Lipovsky, P.; Szoke, Z.; Fil’ko, M.; Novotnak, J.; Hesko, F. MAVLink Messaging Protocol as Potential Candidate for the UTM Communication. In Proceedings of the 2020 New Trends in Signal Processing (NTSP), Demanovska Dolina, Slovakia, 14–16 October 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Khan, N.A.; Jhanjhi, N.Z.; Brohi, S.N.; Nayyar, A. Chapter Three—Emerging use of UAV’s: Secure communication protocol issues and challenges. In Drones in Smart-Cities; Al-Turjman, F., Ed.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 37–55. [Google Scholar] [CrossRef]
- Zhou, X.; Yi, Z.; Liu, Y.; Huang, K.; Huang, H. Survey on path and view planning for UAVs. Virtual Real. Intell. Hardw. 2020, 2, 56–69. [Google Scholar] [CrossRef]
- Jones, M.; Djahel, S.; Welsh, K. Path-planning for unmanned aerial vehicles with environment complexity considerations: A survey. ACM Comput. Surv. 2023, 55, 1–39. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Deng, Y.; Chen, Y.; Zhang, Y.; Mahadevan, S. Fuzzy Dijkstra algorithm for shortest path problem under uncertain environment. Appl. Soft Comput. 2012, 12, 1231–1237. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Sethian, J.A. A fast marching level set method for monotonically advancing fronts. Proc. Natl. Acad. Sci. USA 1996, 93, 1591–1595. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Autonomous Robot Vehicles; Springer: Berlin/Heidelberg, Germany, 1986; pp. 396–404. [Google Scholar]
- LaValle, S.M.; Kuffner, J.J.; Donald, B. Rapidly-exploring random trees: Progress and prospects. Algorithmic Comput. Robot. New Dir. 2001, 5, 293–308. [Google Scholar]
- Yang, Q.; Yoo, S.J. Optimal UAV path planning: Sensing data acquisition over IoT sensor networks using multi-objective bio-inspired algorithms. IEEE Access 2018, 6, 13671–13684. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M.; Labonté, G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Trans. Ind. Inform. 2012, 9, 132–141. [Google Scholar] [CrossRef]
- Azar, A.T.; Koubaa, A.; Ali Mohamed, N.; Ibrahim, H.A.; Ibrahim, Z.F.; Kazim, M.; Ammar, A.; Benjdira, B.; Khamis, A.M.; Hameed, I.A.; et al. Drone deep reinforcement learning: A review. Electronics 2021, 10, 999. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef]
- Yan, S.; Peng, M.; Cao, X. A game theory approach for joint access selection and resource allocation in UAV assisted IoT communication networks. IEEE Internet Things J. 2018, 6, 1663–1674. [Google Scholar] [CrossRef]
- Cai, Y.; Xi, Q.; Xing, X.; Gui, H.; Liu, Q. Path planning for UAV tracking target based on improved A-star algorithm. In Proceedings of the 2019 1st International Conference on Industrial Artificial Intelligence (IAI), Shenyang, China, 23–27 July 2019; pp. 1–6. [Google Scholar]
- Flores-Caballero, G.; Rodríguez-Molina, A.; Aldape-Pérez, M.; Villarreal-Cervantes, M.G. Optimized path-planning in continuous spaces for unmanned aerial vehicles using meta-heuristics. IEEE Access 2020, 8, 176774–176788. [Google Scholar] [CrossRef]
- Shin, J.J.; Bang, H. UAV path planning under dynamic threats using an improved PSO algorithm. Int. J. Aerosp. Eng. 2020, 2020, 1–17. [Google Scholar] [CrossRef]
- Nayeem, G.M.; Fan, M.; Akhter, Y. A time-varying adaptive inertia weight based modified PSO algorithm for UAV path planning. In Proceedings of the 2021 2nd International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST), Khaka, Bangladesh, 5–7 January 2021; pp. 573–576. [Google Scholar]
- Rezwan, S.; Choi, W. Artificial intelligence approaches for UAV navigation: Recent advances and future challenges. IEEE Access 2022, 10, 26320–26339. [Google Scholar] [CrossRef]
- Wang, C.; Wang, J.; Wang, J.; Zhang, X. Deep-reinforcement-learning-based autonomous UAV navigation with sparse rewards. IEEE Internet Things J. 2020, 7, 6180–6190. [Google Scholar] [CrossRef]
- He, L.; Aouf, N.; Song, B. Explainable Deep Reinforcement Learning for UAV autonomous path planning. Aerosp. Sci. Technol. 2021, 118, 107052. [Google Scholar] [CrossRef]
- Liu, Q.; Shi, L.; Sun, L.; Li, J.; Ding, M.; Shu, F. Path planning for UAV-mounted mobile edge computing with deep reinforcement learning. IEEE Trans. Veh. Technol. 2020, 69, 5723–5728. [Google Scholar] [CrossRef]
- Ouahouah, S.; Bagaa, M.; Prados-Garzon, J.; Taleb, T. Deep-reinforcement-learning-based collision avoidance in uav environment. IEEE Internet Things J. 2021, 9, 4015–4030. [Google Scholar] [CrossRef]
- Zhong, X.; Huo, Y.; Dong, X.; Liang, Z. Deep Q-network based dynamic movement strategy in a UAV-Assisted network. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–6. [Google Scholar]
- Huttunen, M. Drone operations in the specific category: A unique approach to aviation safety. Aviat. Space J. 2019, 18, 2–21. [Google Scholar]
- Li, Y.; Liu, M.; Jiang, D. Application of unmanned aerial vehicles in logistics: A literature review. Sustainability 2022, 14, 14473. [Google Scholar] [CrossRef]
- Ecke, S.; Dempewolf, J.; Frey, J.; Schwaller, A.; Endres, E.; Klemmt, H.J.; Tiede, D.; Seifert, T. UAV-based forest health monitoring: A systematic review. Remote Sens. 2022, 14, 3205. [Google Scholar] [CrossRef]
- Mandirola, M.; Casarotti, C.; Peloso, S.; Lanese, I.; Brunesi, E.; Senaldi, I. Use of UAS for damage inspection and assessment of bridge infrastructures. Int. J. Disaster Risk Reduct. 2022, 72, 102824. [Google Scholar] [CrossRef]
- Perez Jimeno, S.; Capa Salinas, J.; Perez Caicedo, J.A.; Rojas Manzano, M.A. An integrated framework for non-destructive evaluation of bridges using UAS: A case study. J. Build. Pathol. Rehabil. 2023, 8, 80. [Google Scholar] [CrossRef]
- Ashour, R.; Aldhaheri, S.; Abu-Kheil, Y. Applications of UAVs in Search and Rescue. In Unmanned Aerial Vehicles Applications: Challenges and Trends; Springer: Berlin/Heidelberg, Germany, 2023; pp. 169–200. [Google Scholar]
- Kožović, D.V.; Đurđević, D.Ž.; Dinulović, M.R.; Milić, S.; Rašuo, B.P. Air traffic modernization and control: ADS-B system implementation update 2022: A review. FME Trans. 2023, 51, 117–130. [Google Scholar] [CrossRef]
- Purucker, P.; Schmid, J.; Höß, A.; Schuller, B.W. System Requirements Specification for Unmanned Aerial Vehicle (UAV) to Server Communication. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 1499–1508. [Google Scholar] [CrossRef]
- Annex, I. ICAO Annex 2 to the Convention on International Civil Aviation—Rules of the Air 2. Available online: https://www.icao.int/Meetings/anconf12/Document (accessed on 30 July 2023).
- García, J.; Molina, J.M.; Trincado, J. Real evaluation for designing sensor fusion in UAV platforms. Inf. Fusion 2020, 63, 136–152. [Google Scholar] [CrossRef]
- Harun, M.H.; Abdullah, S.S.; Aras, M.S.M.; Bahar, M.B. Sensor Fusion Technology for Unmanned Autonomous Vehicles (UAV): A Review of Methods and Applications. In Proceedings of the 2022 IEEE 9th International Conference on Underwater System Technology: Theory and Applications (USYS), Kuala Lumpur, Malaysia, 5–6 December 2022; pp. 1–8. [Google Scholar]
- Networks, G.S.; Association, S.I. Key Strategies for 6G Smart Networks and Services. 2023. Available online: https://6g-ia.eu/wp-content/uploads/2023/09/6g-ia-position-paper_2023_final.pdf (accessed on 1 October 2023).
- Khatouni, A.S.; Soro, F.; Giordano, D. A Machine Learning Application for Latency Prediction in Operational 4G Networks. In Proceedings of the 2019 IFIP/IEEE Symposium on Integrated Network and Service Management (IM), Washington, DC, USA, 8–12 April 2019; pp. 71–74. [Google Scholar]
- Torres-Figueroa, L.; Schepker, H.F.; Jiru, J. QoS Evaluation and Prediction for C-V2X Communication in Commercially-Deployed LTE and Mobile Edge Networks. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Schmid, J.; Purucker, P.; Schneider, M.; vander Zwet, R.; Larsen, M.; Höß, A. Integration of a RTT Prediction into a Multi-path Communication Gateway. In Proceedings of the Computer Safety, Reliability, and Security. SAFECOMP 2021 Workshops, York, UK, 7 September 2021; pp. 201–212. [Google Scholar] [CrossRef]
- Kousaridas, A.; Manjunath, R.P.; Perdomo, J.; Zhou, C.; Zielinski, E.; Schmitz, S.; Pfadler, A. QoS Prediction for 5G Connected and Automated Driving. IEEE Commun. Mag. 2021, 59, 58–64. [Google Scholar] [CrossRef]
- Barmpounakis, S.; Maroulis, N.; Koursioumpas, N.; Kousaridas, A.; Kalamari, A.; Kontopoulos, P.; Alonistioti, N. AI-driven, QoS prediction for V2X communications in beyond 5G systems. Comput. Netw. 2022, 217, 109341. [Google Scholar] [CrossRef]
- Almeida, E.N.; Fernandes, K.; Andrade, F.; Silva, P.; Campos, R.; Ricardo, M. A Machine Learning Based Quality of Service Estimator for Aerial Wireless Networks. In Proceedings of the 2019 International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Barcelona, Spain, 21–23 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Challita, U.; Saad, W.; Bettstetter, C. Interference Management for Cellular-Connected UAVs: A Deep Reinforcement Learning Approach. IEEE Trans. Wirel. Commun. 2019, 18, 2125–2140. [Google Scholar] [CrossRef]
- Kuchar, J.; Drumm, A.C. The traffic alert and collision avoidance system. Linc. Lab. J. 2007, 16, 277. [Google Scholar]
- Williamson, T.; Spencer, N.A. Development and operation of the traffic alert and collision avoidance system (TCAS). Proc. IEEE 1989, 77, 1735–1744. [Google Scholar] [CrossRef]
- Lin, Y.; Saripalli, S. Sense and avoid for unmanned aerial vehicles using ADS-B. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6402–6407. [Google Scholar]
- Mohammadkarimi, M.; Rajan, R.T. Cooperative Sense and Avoid for UAVs using Secondary Radar. arXiv 2023, arXiv:2306.03046. [Google Scholar]
- Schäfer, M.; Strohmeier, M.; Lenders, V.; Martinovic, I.; Wilhelm, M. Bringing up OpenSky: A large-scale ADS-B sensor network for research. In Proceedings of the IPSN-14 Proceedings of the 13th International Symposium on Information Processing in Sensor Networks, Berlin, Germany, 15–17 April 2014; pp. 83–94. [Google Scholar]
- Schafer, M.; Strohmeier, M.; Smith, M.; Fuchs, M.; Pinheiro, R.; Lenders, V.; Martinovic, I. OpenSky report 2016: Facts and figures on SSR mode S and ADS-B usage. In Proceedings of the 2016 IEEE/AIAA 35th Digital Avionics Systems Conference (DASC), Sacramento, CA, USA, 25–29 September 2016; pp. 1–9. [Google Scholar]
- Baek, K.; Bang, H. ADS-B based trajectory prediction and conflict detection for air traffic management. Int. J. Aeronaut. Space Sci. 2012, 13, 377–385. [Google Scholar] [CrossRef][Green Version]
- Yang, X.; Sun, J.; Rajan, R.T. Aircraft Trajectory Prediction using ADS-B Data. In Proceedings of the Pre-Proceedings of the 2022 Symposium on Information Theory and Signal Processing in the Benelux, Louvain la Neuve, Belgium, 1–2 June 2022; p. 113. [Google Scholar]
- Shi, Z.; Xu, M.; Pan, Q.; Yan, B.; Zhang, H. LSTM-based flight trajectory prediction. In Proceedings of the 2018 International Joint Conference on Neural Networks (IJCNN), Rio de Janeiro, Brazil, 8–13 July 2018; IEEE: Rio de Janeiro, Brazil, 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Zhang, Y.; Jia, Z.; Dong, C.; Liu, Y.; Zhang, L.; Wu, Q. Recurrent LSTM-based UAV Trajectory Prediction with ADS-B Information. In Proceedings of the GLOBECOM 2022-2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 1–6. [Google Scholar]
- Olfati-Saber, R. Distributed Kalman filtering for sensor networks. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 5492–5498. [Google Scholar]
- Lian, B.; Wan, Y.; Zhang, Y.; Liu, M.; Lewis, F.L.; Chai, T. Distributed Kalman consensus filter for estimation with moving targets. IEEE Trans. Cybern. 2020, 52, 5242–5254. [Google Scholar] [CrossRef]
- Gu, D. Distributed particle filter for target tracking. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 3856–3861. [Google Scholar]
- Tang, R.; Riemens, E.; Rajan, R.T. Distributed Particle Filter Based on Particle Exchanges. In Proceedings of the 2023 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2023; pp. 1–8. [Google Scholar] [CrossRef]
- Luo, Z.; Li, C.; Zhu, L. A comprehensive survey on blind source separation for wireless adaptive processing: Principles, perspectives, challenges and new research directions. IEEE Access 2018, 6, 66685–66708. [Google Scholar] [CrossRef]
- Mohammadkarimi, M.; Leus, G.; Rajan, R.T. Joint Ranging and Phase Offset Estimation for Multiple Drones using ADS-B Signatures. IEEE Trans. Veh. Technol. 2023, 1–15. [Google Scholar] [CrossRef]
- Politi, E.; Garyfallou, A.; Panagiotopoulos, I.; Varlamis, I.; Dimitrakopoulos, G. Path planning and landing for unmanned aerial vehicles using ai. In Proceedings of the Future Technologies Conference, Vancouver, BC, Canada, 20–21 October 2022; pp. 343–357. [Google Scholar]
- Tang, G.; Tang, C.; Claramunt, C.; Hu, X.; Zhou, P. Geometric A-star algorithm: An improved A-star algorithm for AGV path planning in a port environment. IEEE Access 2021, 9, 59196–59210. [Google Scholar] [CrossRef]
- Mac, T.T.; Copot, C.; Tran, D.T.; De Keyser, R. A hierarchical global path planning approach for mobile robots based on multi-objective particle swarm optimization. Appl. Soft Comput. 2017, 59, 68–76. [Google Scholar] [CrossRef]
- Diab, M.; Mohammadkarimi, M.; Rajan, R.T. Artificial Potential Field-Based Path Planning for Cluttered Environments. In Proceedings of the 2023 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2023; pp. 1–8. [Google Scholar] [CrossRef]
- Chen, Y.B.; Luo, G.C.; Mei, Y.S.; Yu, J.Q.; Su, X.L. UAV path planning using artificial potential field method updated by optimal control theory. Int. J. Syst. Sci. 2016, 47, 1407–1420. [Google Scholar] [CrossRef]
- Purucker, P.; Reis, R.J.; Larsen, M.; Ryabokon, A.; Giovagnola, J.; Filho, E.; Reil, C.; Höß, A.; Guerra, J.B.; Molina, M.; et al. Tackling different aspects of drone services utilizing technologies from cross-sectional industries. J. Phys. Conf. Ser. 2023, 2526, 012085. [Google Scholar] [CrossRef]
- Al Haddad, C.; Chaniotakis, E.; Straubinger, A.; Plötner, K.; Antoniou, C. Factors affecting the adoption and use of urban air mobility. Transp. Res. Part A Policy Pract. 2020, 132, 696–712. [Google Scholar] [CrossRef]
- MarketsandMarkets UAV Market Global Forecast 2027. Available online: https://www.marketsandmarkets.com/Market-Reports/unmanned-aerial-vehicles-uav-market-662.html?gad_source=1&gclid=Cj0KCQiA7OqrBhD9ARIsAK3UXh20dq7v_WA0_eJpJ8-9QzE699lGdHjMANQiVCdBYhbz72dXD0ClMIIaApleEALw_wcB (accessed on 30 September 2023).
- Politi, E.; Varlamis, I.; Tserpes, K.; Larsen, M.; Dimitrakopoulos, G. The future of safe BVLOS drone operations with respect to system and service engineering. In Proceedings of the 2022 IEEE International Conference on Service-Oriented System Engineering (SOSE), Newark, CA, USA, 15–18 August 2022; pp. 133–140. [Google Scholar]
- Rovira-Sugranes, A.; Razi, A.; Afghah, F.; Chakareski, J. A review of AI-enabled routing protocols for UAV networks: Trends, challenges, and future outlook. Ad Hoc Netw. 2022, 130, 102790. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Politi, E.; Purucker, P.; Larsen, M.; Reis, R.J.D.; Rajan, R.T.; Penna, S.D.; Boer, J.-F.; Rodosthenous, P.; Dimitrakopoulos, G.; Varlamis, I.; et al. Enabling Technologies for the Navigation and Communication of UAS Operating in the Context of BVLOS. Electronics 2024, 13, 340. https://doi.org/10.3390/electronics13020340
Politi E, Purucker P, Larsen M, Reis RJD, Rajan RT, Penna SD, Boer J-F, Rodosthenous P, Dimitrakopoulos G, Varlamis I, et al. Enabling Technologies for the Navigation and Communication of UAS Operating in the Context of BVLOS. Electronics. 2024; 13(2):340. https://doi.org/10.3390/electronics13020340
Chicago/Turabian StylePoliti, Elena, Patrick Purucker, Morten Larsen, Ricardo J. Dos Reis, Raj Thilak Rajan, Sergio Duarte Penna, Jan-Floris Boer, Panagiotis Rodosthenous, George Dimitrakopoulos, Iraklis Varlamis, and et al. 2024. "Enabling Technologies for the Navigation and Communication of UAS Operating in the Context of BVLOS" Electronics 13, no. 2: 340. https://doi.org/10.3390/electronics13020340
APA StylePoliti, E., Purucker, P., Larsen, M., Reis, R. J. D., Rajan, R. T., Penna, S. D., Boer, J.-F., Rodosthenous, P., Dimitrakopoulos, G., Varlamis, I., & Höß, A. (2024). Enabling Technologies for the Navigation and Communication of UAS Operating in the Context of BVLOS. Electronics, 13(2), 340. https://doi.org/10.3390/electronics13020340