
Reducing Distracted Driving and Improving Consistency with Brine Truck Automation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Current Anti-Icing and De-Icing Practices
3. Distracted Driving Literature
4. Opportunity to Adapt Agricultural Technology
5. Objective and Scope
6. Overview and Methodology
7. Impacts of Automation on Reducing Driver Workload
8. Summary Statistics from 2022–2023 Winter Season
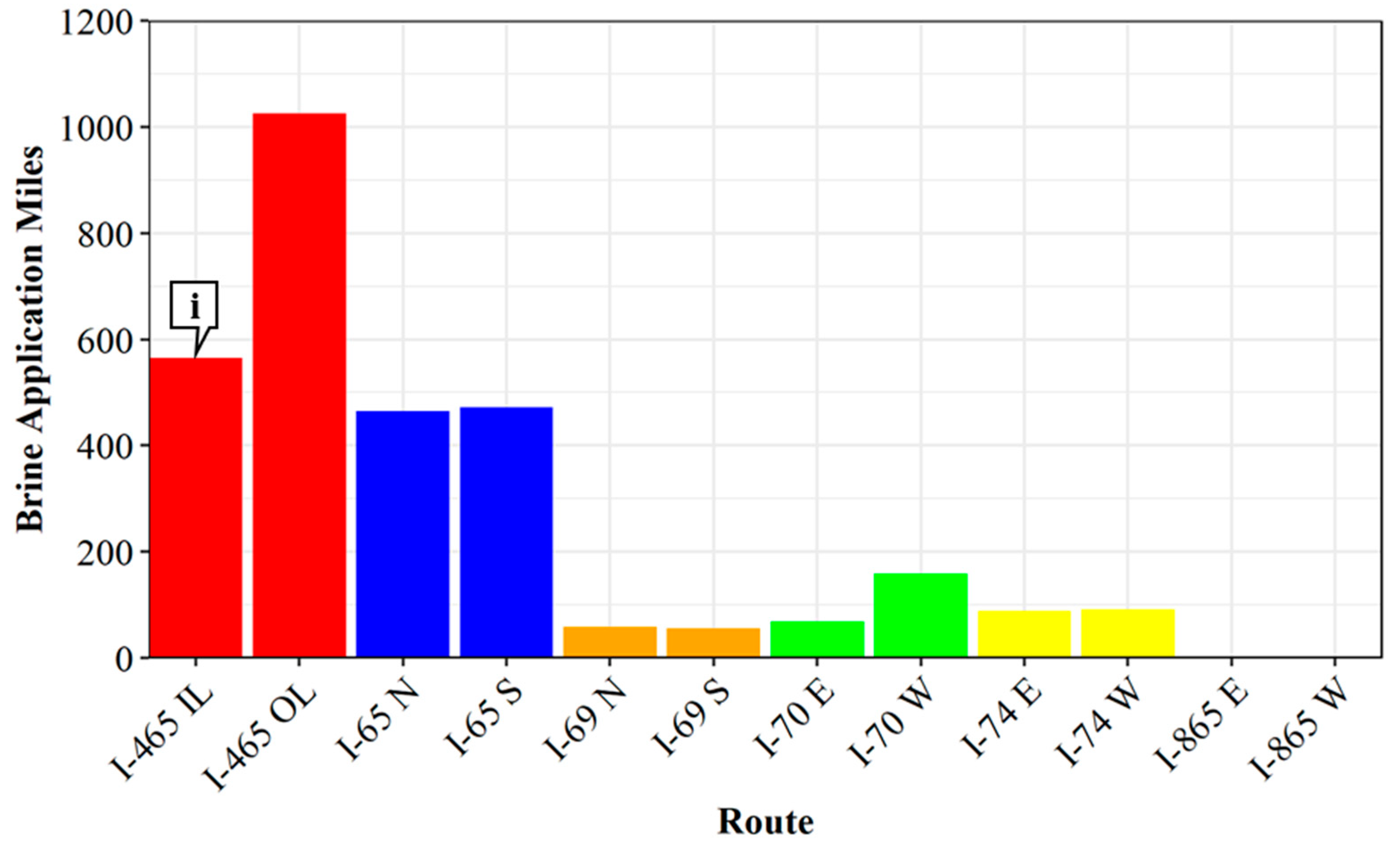
8.1. Total Miles of Application
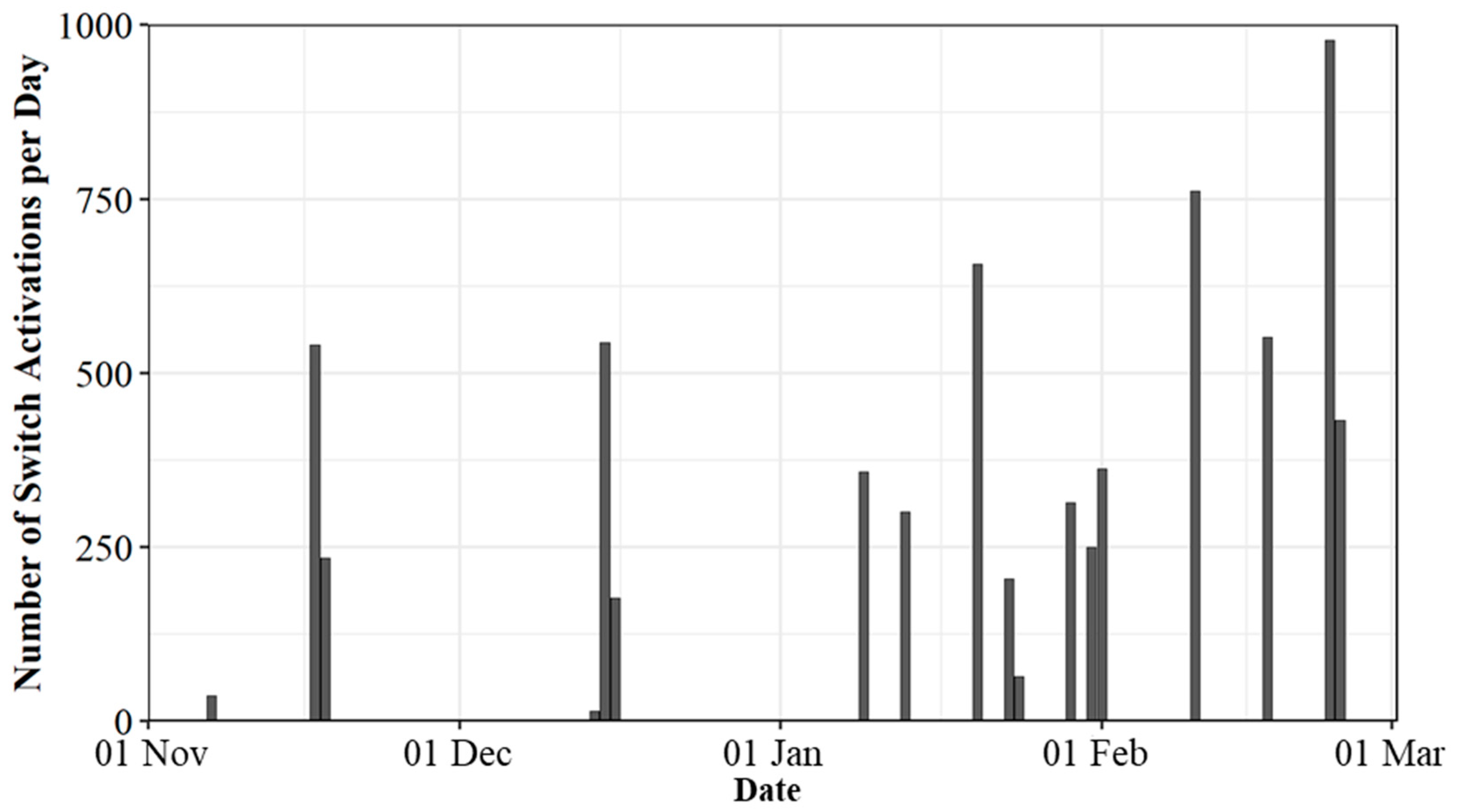
8.2. Safety Improvements
9. Conclusions and Future Scope
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Snow & Ice—FHWA Road Weather Management. Available online: https://ops.fhwa.dot.gov/weather/weather_events/snow_ice.htm (accessed on 20 July 2023).
- National Highway Traffic Safety Administration. Winter Weather Driving Tips|NHTSA. Available online: https://www.nhtsa.gov/winter-driving-tips (accessed on 28 July 2023).
- Dolce, C. Weather-Related Vehicle Accidents Far More Deadly Than Tornadoes, Hurricanes, Floods|Weather.com. The Weather Channel. 5 February 2022. Available online: https://weather.com/safety/winter/news/weather-fatalities-car-crashes-accidents-united-states (accessed on 28 July 2023).
- Haake, D.M.; Knouft, J.H. Comparison of Contributions to Chloride in Urban Stormwater from Winter Brine and Rock Salt Application. Environ. Sci. Technol. 2019, 53, 11888–11895. [Google Scholar] [CrossRef] [PubMed]
- Claros, B.; Chitturi, M.; Bill, A.; Noyce, D. Environmental, Economic, and Operational Impacts of Roadway Winter Maintenance: Salt Brine Field Evaluation. J. Cold Reg. Eng. 2021, 35, 04021013. [Google Scholar] [CrossRef]
- Commercial Driver License Manual; Federal Motor Carrier Safety Administration: Washington, DC, USA, 2017. Available online: https://www.in.gov/bmv/files/cdl-manual.pdf (accessed on 13 December 2023).
- National Highway Traffic Safety Administration. Distracted Driving. Available online: https://www.nhtsa.gov/risky-driving/distracted-driving (accessed on 13 December 2023).
- Bieber, C. Distracted Driving Statistics & Facts in 2023. Forbs Advisor. Available online: https://www.forbes.com/advisor/legal/auto-accident/distracted-driving-statistics/ (accessed on 13 December 2023).
- Stewart, T. Overview of Motor Vehicle Traffic Crashes in 2021; Publication DOT HS 813 435; National Highway Traffic Safety Administration: Washington, DC, USA, 2023. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/813435 (accessed on 13 December 2023).
- Hasan, A.S.; Orvin, M.M.; Jalayer, M.; Heitmann, E.; Weiss, J. Analysis of Distracted Driving Crashes in New Jersey Using Mixed Logit Model. J. Saf. Res. 2022, 81, 166–174. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Dou, Y.; Wu, J.; Su, W.; Wu, C. Distracted Driving Caused by Voice Message Apps: A Series of Experimental Studies. Transp. Res. Part F Traffic Psychol. Behav. 2021, 76, 1–13. [Google Scholar] [CrossRef]
- Beanland, V.; Fitzharris, M.; Young, K.L.; Lenné, M.G. Driver Inattention and Driver Distraction in Serious Casualty Crashes: Data from the Australian National Crash In-Depth Study. Accid. Anal. Prev. 2013, 54, 99–107. [Google Scholar] [CrossRef] [PubMed]
- Engelberg, J.K.; Hill, L.L.; Rybar, J.; Styer, T. Distracted Driving Behaviors Related to Cell Phone Use among Middle-Aged Adults. J. Transp. Health 2015, 2, 434–440. [Google Scholar] [CrossRef]
- Tison, J.; Chaudhary, N.; Cosgrove, L. National Phone Survey on Distracted Driving Attitudes and Behaviors; (Report No. DOT HS 811 555); National Highway Traffic Safety Administration: Washington, DC, USA, 2011. Available online: https://rosap.ntl.bts.gov/view/dot/1928 (accessed on 13 December 2023).
- Peng, Y.; Song, G.; Guo, M.; Wu, L.; Yu, L. Investigating the Impact of Environmental and Temporal Features on Mobile Phone Distracted Driving Behavior Using Phone Use Data. Accid. Anal. Prev. 2023, 180, 106925. [Google Scholar] [CrossRef] [PubMed]
- Alnawmasi, N.; Mannering, F. A Temporal Assessment of Distracted Driving Injury Severities Using Alternate Unobserved-Heterogeneity Modeling Approaches. Anal. Methods Accid. Res. 2022, 34, 100216. [Google Scholar] [CrossRef]
- Rumschlag, G.; Palumbo, T.; Martin, A.; Head, D.; George, R.; Commissaris, R.L. The Effects of Texting on Driving Performance in a Driving Simulator: The Influence of Driver Age. Accid. Anal. Prev. 2015, 74, 145–149. [Google Scholar] [CrossRef] [PubMed]
- Boyle, L.N.; Lee, J.D. Using Driving Simulators to Assess Driving Safety. Accid. Anal. Prev. 2010, 42, 785–787. [Google Scholar] [CrossRef] [PubMed]
- Papantoniou, P.; Papadimitriou, E.; Yannis, G. Review of Driving Performance Parameters Critical for Distracted Driving Research. Transp. Res. Procedia 2017, 25, 1796–1805. [Google Scholar] [CrossRef]
- O’Rourke, T.; Illinois Center for Transportation. Snowplow Simulator Training Study; Publication FHWA-ICT-11-077; Illinois Center for Transportation: Champaign, IL, USA, 2011. [Google Scholar]
- Masciocchi, C.; Dark, V.J.; Parkhurst, D. Evaluation of Virtual Reality Snowplow Simulator Training; Publication CTRE Project 06-245; Center for Transportation Research and Education: Ames, IA, USA, 2007. [Google Scholar]
- Kihl, M. Snowplow Simulator Training Evaluation; Publication FHWA-AZ-06-585; Arizona State University, College of Architecture and Environmental Design: Tempe, AZ, USA, 2006. [Google Scholar]
- Zheng, Y. Utilizing T-O-E Framework for Evaluating the Use of Simulators in Snowplow Driver Training; Purdue University: West Lafayette, IN, USA, 2022. [Google Scholar]
- Firm, K. Snowplow Accidents: An Unrecognized Winter Hazard. The Killino Firm P.C. 2021. Available online: https://www.killinofirm.com/news/snowplow-accidents-an-unrecognized-winter-hazard (accessed on 13 December 2023).
- Bolten, K.A. Snowplows Spin off Scores of Winter Accidents. USA TODAY. 1 January 2015. Available online: https://www.usatoday.com/story/news/nation/2015/01/01/snowplow-accidents-iowa/21175767/ (accessed on 13 December 2023).
- Zockaie, A.; Saedi, R.; Gates, T.; Savolainen, P.; Schneider, B.; Ghamami, M.; Verma, R.; Fakhrmoosavi, F.; Kavianipour, M.S.; Shojaei, M.; et al. Evaluation of a Collision Avoidance and Mitigation System (CAMS) on Winter Maintenance Trucks; Publication OR 17-103; Michigan Department of Transportation: Lansing, MI, USA, 2018; p. 92. Available online: https://rosap.ntl.bts.gov/view/dot/42752/dot_42752_DS1.pdf (accessed on 13 December 2023).
- Steinfeld, A.; Tan, H.-S. Development of a Driver Assist Interface for Snowplows Using Iterative Design. Transp. Hum. Factors 2000, 2, 247–264. [Google Scholar] [CrossRef]
- Liao, C.-F.; Morris, N.L.; Achtemeier, J.; Alexander, L.; Davis, B.; Donath, M.; Parikh, G. Development of Driver Assistance Systems to Support Snowplow Operations; Publication CTS 18-14; Center for Transportation Studies, University of Minnesota: Minneapolis, MN, USA, 2018; Available online: http://conservancy.umn.edu/handle/11299/200641 (accessed on 13 December 2023).
- Baltazar, A.R.; dos Santos, F.N.; Moreira, A.P.; Valente, A.; Cunha, J.B. Smarter Robotic Sprayer System for Precision Agriculture. Electronics 2021, 10, 2061. [Google Scholar] [CrossRef]
- Meshram, A.T.; Vanalkar, A.V.; Kalambe, K.B.; Badar, A.M. Pesticide Spraying Robot for Precision Agriculture: A Categorical Literature Review and Future Trends. J. Field Robot. 2022, 39, 153–171. [Google Scholar] [CrossRef]
- Danton, A.; Roux, J.-C.; Dance, B.; Cariou, C.; Lenain, R. Development of a Spraying Robot for Precision Agriculture: An Edge Following Approach. In Proceedings of the 2020 IEEE Conference on Control Technology and Applications (CCTA), Montreal, QC, Canada, 24–26 August 2020. [Google Scholar] [CrossRef]
- Giles, K.D.; Henderson, G.W.; Funk, K. Digital Control of Flow Rate and Spray Droplet Size from Agricultural Nozzles for Precision Chemical Application. In Proceedings of the Third International Conference on Precision Agriculture; Robert, P.C., Rust, R.H., Larson, W.E., Eds.; American Society of Agronomy, Crop Science Society of America, Soil Science Society of America: Madison, WI, USA, 1996; pp. 729–738. [Google Scholar] [CrossRef]
- Bongiovanni, R.; Lowenberg-Deboer, J. Precision Agriculture and Sustainability. Precis. Agric. 2004, 5, 359–387. [Google Scholar] [CrossRef]
- Hernández-Hernández, J.L.; Ruiz-Hernández, J.; García-Mateos, G.; González-Esquiva, J.M.; Ruiz-Canales, A.; Molina-Martínez, J.M. A New Portable Application for Automatic Segmentation of Plants in Agriculture. Agric. Water Manag. 2017, 183, 146–157. [Google Scholar] [CrossRef]
- Cambra, C.; Díaz, J.R.; Lloret, J. Deployment and Performance Study of an Ad Hoc Network Protocol for Intelligent Video Sensing in Precision Agriculture. In Ad-Hoc Networks and Wireless; Garcia Pineda, M., Lloret, J., Papavassiliou, S., Ruehrup, S., Westphall, C.B., Eds.; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef]
- Alam, M.; Alam, M.S.; Roman, M.; Tufail, M.; Khan, M.U.; Khan, M.T. Real-Time Machine-Learning Based Crop/Weed Detection and Classification for Variable-Rate Spraying in Precision Agriculture. In Proceedings of the 2020 7th International Conference on Electrical and Electronics Engineering (ICEEE), Antalya, Turkey, 14–16 April 2020. [Google Scholar] [CrossRef]
- Tona, E.; Calcante, A.; Oberti, R. The Profitability of Precision Spraying on Specialty Crops: A Technical–Economic Analysis of Protection Equipment at Increasing Technological Levels. Precis. Agric. 2018, 19, 606–629. [Google Scholar] [CrossRef]
- Batte, M.T.; Ehsani, M.R. The Economics of Precision Guidance with Auto-Boom Control for Farmer-Owned Agricultural Sprayers. Comput. Electron. Agric. 2006, 53, 28–44. [Google Scholar] [CrossRef]
- Mahlberg, J.; Zhang, Y.; Jha, S.; Mathew, J.K.; Li, H.; Desai, J.; Kim, W.; McGuffey, J.; Wells, T.; Krogmeir, J.V.; et al. Development of an Intelligent Snowplow Truck That Integrates Telematics Technology, Roadway Sensors, and Connected Vehicle; Purdue University: West Lafayette, IN, USA, 2021. [Google Scholar] [CrossRef]
- Mahlberg, J.; Matthew, J.; Horton, D.; McGavic, B.; Wells, T.; Bullock, D. Intelligent Sidewalk De-Icing and Pre-Treatment with Connected Campus Maintenance Vehicles; Purdue University: West Lafayette, IN, USA, 2022. [Google Scholar] [CrossRef]
- Raven Industries. GNSS Receivers. Available online: https://ravenind.com/products/guidance/gnss-receivers (accessed on 13 December 2023).
- Indiana Department of Transportation. Traffic Count Database System (TCDS). Available online: https://indot.public.ms2soft.com/tcds/tsearch.asp?loc=Indot&mod=TCDS (accessed on 28 July 2023).





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahlberg, J.A.; Mathew, J.K.; Desai, J.; Bullock, D.M. Reducing Distracted Driving and Improving Consistency with Brine Truck Automation. Electronics 2024, 13, 327. https://doi.org/10.3390/electronics13020327
Mahlberg JA, Mathew JK, Desai J, Bullock DM. Reducing Distracted Driving and Improving Consistency with Brine Truck Automation. Electronics. 2024; 13(2):327. https://doi.org/10.3390/electronics13020327
Chicago/Turabian StyleMahlberg, Justin Anthony, Jijo K. Mathew, Jairaj Desai, and Darcy M. Bullock. 2024. "Reducing Distracted Driving and Improving Consistency with Brine Truck Automation" Electronics 13, no. 2: 327. https://doi.org/10.3390/electronics13020327
APA StyleMahlberg, J. A., Mathew, J. K., Desai, J., & Bullock, D. M. (2024). Reducing Distracted Driving and Improving Consistency with Brine Truck Automation. Electronics, 13(2), 327. https://doi.org/10.3390/electronics13020327